
Universal Learning Machine with Genetic Programming
Alessandro Re, Leonardo Vanneschi and Mauro Castelli
NOVA Information Management School (NOVA IMS), Universidade Nova de Lisboa,
Campus de Campolide, 1070-312, Lisbon, Portugal
Keywords:
Genetic Programming, Geometric Semantic Genetic Programming, Machine Learning, Ensembles, Master
Algorithm.
Abstract:
This paper presents a proof of concept. It shows that Genetic Programming (GP) can be used as a “universal”
machine learning method, that integrates several different algorithms, improving their accuracy. The system
we propose, called Universal Genetic Programming (UGP) works by defining an initial population of pro-
grams, that contains the models produced by several different machine learning algorithms. The use of elitism
allows UGP to return as a final solution the best initial model, in case it is not able to evolve a better one.
The use of genetic operators driven by semantic awareness is likely to improve the initial models, by combin-
ing and mutating them. On three complex real-life problems, we present experimental evidence that UGP is
actually able to improve the models produced by all the studied machine learning algorithms in isolation.
1 INTRODUCTION
According to the No Free Lunch Theorem (Wolpert
and Macready, 1997), if averaged on all existing prob-
lems, all Machine Learning (ML) algorithms have the
same performance. As a consequence, no algorithm
is better than all the others on all existing problems
and so discovering the most appropriate algorithm for
solving one particular application is usually a diffi-
cult task. Typically, the choice of the ML technique
involves an experimental comparison between sev-
eral different algorithms. Besides time-consuming,
this experimental phase has also, generally speaking,
an uncertain outcome. In fact, the most appropriate
algorithm for the considered problem may have not
been included in the experimental comparison, or the
results may lack statistical significance. This paper
represents the first proof of concept that Genetic Pro-
gramming (GP) (Koza, 1992) can be used as a univer-
sal learning machine, able to completely relieve the
user from the choice of the ML algorithm. We do this
by presenting a system, called Universal Genetic Pro-
gramming (UGP), that integrates several different ML
methods, called Basic Learners (BLs), and guarantees
that the returned model is, in the worst case, the best
among the ones generated by the BLs, or hopefully a
significant improvement of it.
This is guaranteed thanks to the dynamics of evo-
lution: in UGP the initial population is not random,
as it is usual in GP, but is seeded using the models
returned by the BLs. Such an idea has a major diffi-
culty: all the models generated by the BLs should be
represented using the same encoding, and that encod-
ing must be usable by GP (for instance, they should be
represented as trees). This may be very hard to obtain,
given the diverse nature and characteristics of the var-
ious ML algorithms that could be used as BLs. How-
ever, UGP is able to completely avoid this work of
encoding. In fact, UGP uses Geometric Semantic Ge-
netic Programming (GSGP) (Moraglio et al., 2012),
one of the most recent and powerful developments
of GP. GSGP allows us to abstract from the solution
representation since it bases the evolution purely on
semantics. In the GP terminology, semantics is the
vector of outputs of a model on the training obser-
vations. Each model generated by the BLs can be
represented in the UGP population by its semantics.
Hence, it is not needed to carry on its syntactic struc-
ture (that can be extremely large) during the evolu-
tion. In this way, any existing ML algorithm can be
used by UGP as a BL, in a simple way and with no
limitation. GSGP uses Geometric Semantic Opera-
tors (GSOs) instead of the traditional crossover and
mutation. GSOs induce a unimodal error surface (i.e.
a surface with no local optima) for any supervised
learning problem. This fact bestows on UGP the abil-
ity to improve the BLs. Furthermore, UGP counter-
acts overfitting, thanks to some well studied theoreti-
cal properties of the GSOs (Vanneschi et al., 2014b).
In this paper, which represents the first step in this
Re, A., Vanneschi, L. and Castelli, M.
Universal Learning Machine with Genetic Programming.
DOI: 10.5220/0007808101150122
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 115-122
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
115

promising research track, only three ML methods are
used as BLs: linear regression, support vector regres-
sion and multi-layer perceptron regression. Further-
more, an extended version of UGP, called UGP with
selection (UGP-SEL), aimed at further counteracting
the overfitting of the BLs, is presented. The power of
UGP and UGP-SEL is tested on three real-life sym-
bolic regression problems. Their performance is com-
pared to the one of GSGP and to the one of the BLs
used in isolation.
2 GEOMETRIC SEMANTIC
GENETIC PROGRAMMING
Even though the term semantics can have several dif-
ferent interpretations, it is a common trend in the
Genetic Programming (GP) (Koza, 1992) community
(and this is what we do also here) to identify the se-
mantics of a solution with the vector of its output
values on the training data (Vanneschi et al., 2014a).
Under this perspective, a GP individual can be iden-
tified with a point (its semantics) in a multidimen-
sional space that we call semantic space. The term
Geometric Semantic Genetic Programming (GSGP)
indicates a recently introduced variant of GP in which
traditional crossover and mutation are replaced by so-
called Geometric Semantic Operators (GSOs), which
exploit semantic awareness and induce precise geo-
metric properties on the semantic space.
GSOs, introduced by Moraglio et al. (Moraglio
et al., 2012), are becoming more and more popular in
the GP community (Vanneschi et al., 2014a) because
of their property of inducing a unimodal error surface
on any problem consisting in matching sets of input
data into known targets (like for instance supervised
learning problems such as regression and classifica-
tion).
In particular
1
, geometric semantic crossover
generates, as the unique offspring of parents
T
1
, T
2
: R
n
→ R, the expression:
T
XO
= (T
1
· T
R
) + ((1 − T
R
) · T
2
)
where T
R
is a random real function whose output val-
ues range in the interval [0, 1]. Analogously, geomet-
ric semantic mutation returns, as the result of the mu-
tation of an individual T : R
n
→ R, the expression:
T
M
= T + ms · (T
R1
− T
R2
)
1
Here we report the definition of the GSOs as given by
Moraglio et al. for real functions domains, since these are
the operators we will use in the experimental phase. For
applications that consider other types of data, the reader is
referred to (Moraglio et al., 2012).
where T
R1
and T
R2
are random real functions with
codomain in [0, 1] and ms is a parameter called mu-
tation step.
Moraglio et al. (Moraglio et al., 2012) show that
geometric semantic crossover corresponds to geomet-
ric crossover in the semantic space (i.e. the point rep-
resenting the offspring stands on the segment joining
the points representing the parents) and geometric se-
mantic mutation corresponds to ball mutation in the
semantic space (and thus induces a unimodal fitness
landscape on the above mentioned types of problem).
The GSOs implementation presented in (Van-
neschi et al., 2013; Castelli et al., 2015a) not only
makes GSGP usable in practice by solving the draw-
backs pointed out in the original work of Moraglio,
but was also a source of inspiration for the work pre-
sented here. Given that the solutions semantics is
enough to make GSGP work, the population can be
seeded with any solution, even the ones returned by
other ML algorithms. This can be done independently
from the representation used by the ML algorithms
to encode their models. In other words, GSGP al-
lows us to abstract from the representation of the so-
lutions (Moraglio et al., 2012).
GSOs have a known limitation (Vanneschi et al.,
2014a; Castelli et al., 2015a): the reconstruction of
the best individual at the end of a run can be a hard
(and sometimes even impossible) task, due to its large
size. This issue is even more visible in UGP, where
the initial individuals may already be very large (as-
sume for instance that the population is seeded with
a model generated by a deep neural network). This
basically turns UGP into a black-box system.
3 UNIVERSAL GENETIC
PROGRAMMING (UGP)
As mentioned above, GSGP is able to induce a uni-
modal error surface for any supervised learning prob-
lem. Thus, GSGP is characterized by excellent opti-
mization power. Furthermore, solid theoretical foun-
dations (Vanneschi et al., 2013) allow us to state that
GSGP is also able to limit overfitting, under some
precise and well-studied circumstances. Taking into
account these characteristics, a new idea comes natu-
rally: seeding the initial population with a set of pre-
dictive models, that have been obtained by as many
ML methods (Basic Learners, BLs), instead of ran-
domly as customary in GP. This is possible and easy,
simply running the BLs, storing the semantics of the
generated models and using them in the initial pop-
ulation of GSGP. GSGP with this new initialization
is called UGP (Universal GP) and presented in this
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
116

paper. We can assert that UGP has the following
characteristics: (1) With the simple use of elitism,
well known in GP (Koza, 1992), UGP is able, in the
worst case, to return the best model found by the BLs;
(2) Thanks to the unimodal error surface induced by
GSOs, UGP can easily improve the models found by
the BLs; (3) Thanks to the theoretical properties of
GSGP, UGP is able to limit overfitting.
3.1 Universal Genetic Programming
with Selection Mechanism
(UGP-SEL)
The fact that GSGP can limit overfitting has been
demonstrated in the literature for a traditional ran-
domly generated initial population (Castelli et al.,
2014b). When, as it is the case for UGP, the initial
population integrates randomly generated individuals
with models that have already been trained (the mod-
els generated by the BLs), the picture can be differ-
ent. Indeed, it is expected that the models generated
by the BLs will have a much better training fitness
than the randomly generated ones, and thus they will
be selected for mating many times, at least in the first
phase of the evolution. In such a situation, it is easy
to imagine that if those models overfit training data, it
will be very hard for UGP to return a final model that
does not overfit. In simple words, we have to avoid to
seed the population with overfitting models.
The objective of UGP-SEL is to minimize the
possibility of having overfitted models in the initial
population. This is obtained by means of a pre-
evolutionary selection procedure aimed at estimating
the generalization ability of BLs before adding them
to the initial population. This is done using a val-
idation dataset which is separated from the dataset
used for training the BLs. The selection procedure we
introduce works by partitioning the entire dataset in
three subsets: training, validation and testing datasets.
The training dataset is used to train the BLs. The
validation is used to estimate the performance of the
models generated by the BLs, with the objective of
discarding the overfitting ones. Training can then
take place again using both the training and validation
datasets. The output performances are then measured
on the testing dataset, which is completely unknown
to the models. In this scheme, different selection pro-
cedures can be adopted, for example discarding BLs
that have excessively poor validation performance
when compared to training. This procedure scales
well with the number of models used to construct the
BLs, as it requires a single training and a single val-
idation for each learner, and can be adopted once a
strategy for evaluating the performance and discard-
ing BLs is defined. In our case, to obtain robust
statistical evidence, we adopt a nested K-fold cross-
validation procedure, which involves testing which
combination of models yields the best performance
after a short run of UGP. The winning combination of
models is then used for a long run of UGP.
More precisely, let D be the entire dataset and p
i
its i-th partition. Then, in K-fold cross-validation, the
datasets used in the k-th fold are defined as d
v
k
= p
k
and d
t
k
= D \ p
k
, for 1 ≤ k ≤ K. Similarly, we perform
nested J-fold cross-validation by defining the datasets
n
v
k j
and n
t
k j
, obtained by partitioning d
t
k
instead of D ,
having n
t
k j
∪ n
v
k j
= d
t
k
for 1 ≤ j ≤ J. Given a set of
M models generated by the BLs, the pre-evolutionary
selection procedure we used first involved training all
the models over n
t
k j
, then take every combination of
models and performing a short UGP run, using the
same dataset n
t
k j
to compute fitness values, and eval-
uating their performances over n
v
k j
. The results of
these runs are averaged across the J-folds, and the
best combination of models is selected to be used in
the next phase. Once a combination of models is se-
lected, it is used to perform a long run of UGP: mod-
els are trained again over d
t
k
, which is also used to
compute the fitness during the evolution, while d
v
k
is
used for evaluation purposes (test set). Note that this
procedure is repeated K times and then averaged.
UGP-SEL, as we defined it, is computationally ex-
pensive: it requires to train models multiple times
over different datasets, suffers from a combinatorial
explosion when M increases and requires to execute
a large number of (short) UGP runs. However, the use
of UGP-SEL gave us some useful insights, as it will
appear clear when we will present our experimental
study (Section 4).
4 EXPERIMENTAL STUDY
4.1 Test Problems and Experimental
Settings
For each model, 60 runs were performed adopting a 5-
fold cross-validation scheme and, where applicable, a
nested 4-fold cross-validation. Each run used a popu-
lation of 200 individuals and a total of 200000 fitness
evaluations were performed. When UGP-SEL was
used, the brief evolutionary stage consisted of 4000
fitness evaluations. The population was initialized
with the ramped half and half method (Koza, 1992),
except for UGP, where the population is seeded us-
ing the three models evolved by Multilayer Percep-
tron, Support Vector Regression and Linear Regres-
Universal Learning Machine with Genetic Programming
117

sion, while the remaining 197 individuals are initial-
ized using the ramped half and half algorithm, with
an initial maximum height of 6. No height constraints
were in place after initialization. For UGP-SEL the
initialization is done using the models chosen by the
selection mechanism described in Section 3.1, plus
the remaining individuals generated randomly using
ramped half and half. Besides those parameters, the
primitive operators were addition, subtraction, multi-
plication, and division protected as in (Koza, 1992).
The terminal symbols included one variable for each
feature in the dataset and no constants. Parent selec-
tion was done using tournaments of size 4. Crossover
rate and mutation rate were equal to 70% and 30%
respectively. These values were selected after a pre-
liminary tuning phase aimed at discovering the most
suitable values of the parameters, and since a manual
tuning of the parameters showed no (statistically sig-
nificant) difference in terms of performance with re-
spect to other configurations tested. This is related to
the fact that it has become increasingly clear that GP
is very robust to parameter values once a good config-
uration is determined, as suggested by a recent large
and conclusive study (Sipper et al., 2018). The error
measure adopted to measure the fitness of one seman-
tic against the train semantic was the Mean Absolute
Error (MAE).
Table 1: Description of the test problems. For each dataset,
the number of features and the number of instances are re-
ported.
Dataset # Features # Instances
Parkinson (Castelli
et al., 2014a)
26 5875
Energy (Castelli
et al., 2015b)
8 768
Concrete (Castelli
et al., 2013)
8 1029
The test problems that we have used in our ex-
perimental study are three symbolic regression real-
life applications. The first one (Parkinson) aims at
predicting the value of the unified Parkinson’s dis-
ease rating scale as a function of several patients fea-
tures, mainly extracted from their voice. The sec-
ond problem (Energy) has the objective of forecasting
the value of the energy consumption in some particu-
lar geographic areas and on some particular days, as
a function of some of the observable characteristics
of that (and previous) day(s) (for instance meteoro-
logic characteristics and others). Finally, the Concrete
problem aims at predicting the value of the concrete
strength, as a function of some features of the mate-
rial. All these problems have already been used in
previous GP studies (Castelli et al., 2014b; Castelli
et al., 2014a; Castelli et al., 2013; Castelli et al.,
2015b). Table 1 reports, for each dataset, the num-
ber of features (variables) and the number of instances
(observations). For a complete description of these
datasets, the reader is referred to the references re-
ported in the same table.
4.2 Experimental Results
The experimental study aims at understanding the
real advantage of using GP as a universal learning
method. To accomplish this task, we analyzed differ-
ent aspects. We initially compared the performance
over training and unseen instances of three different
GP-systems: GSGP, UGP, and UGP-SEL. The re-
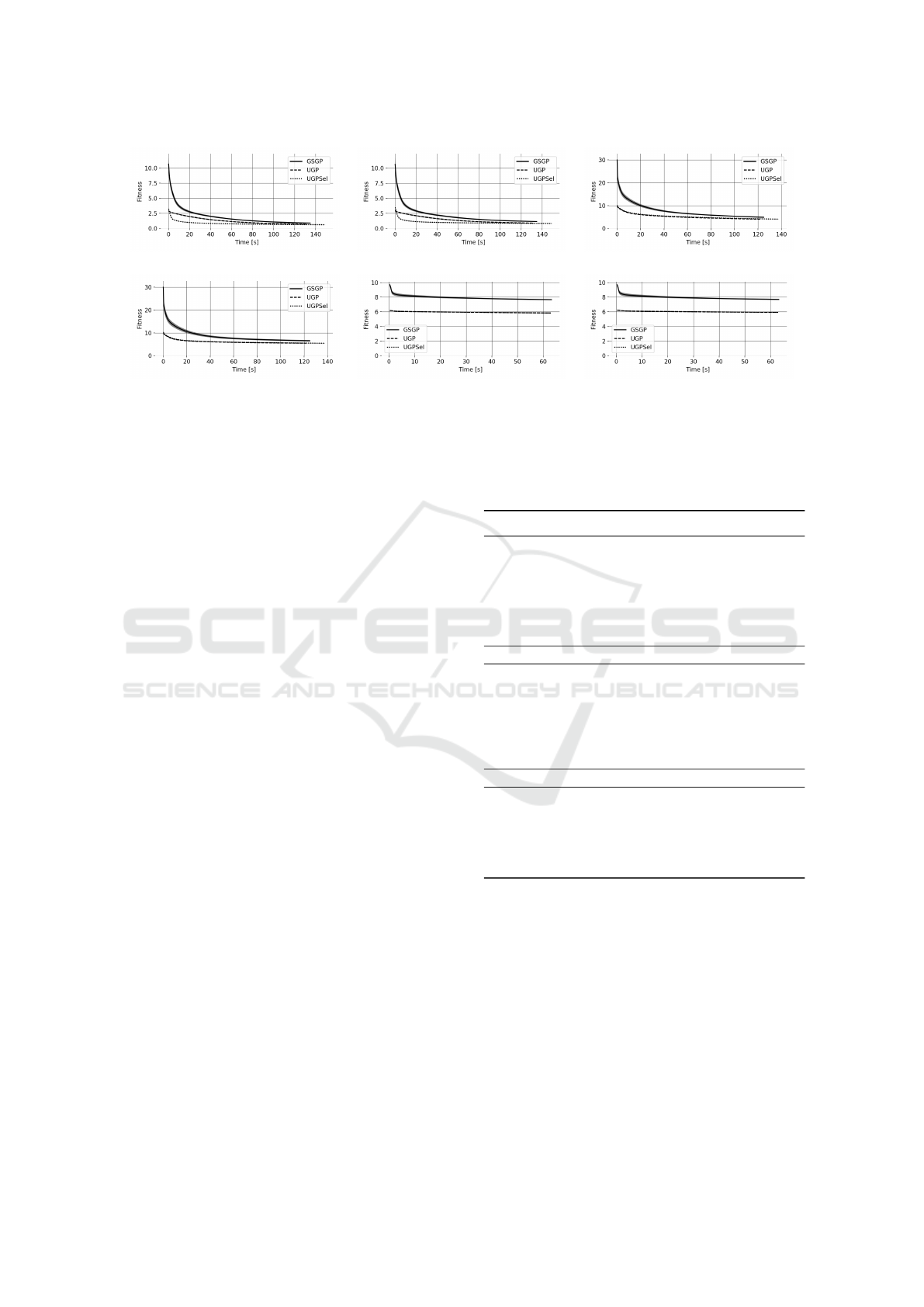
sults of this analysis are reported in Figure 1. Fo-
cusing on the performance achieved on the training
instances, and considering the three benchmark prob-
lems, it is possible to observe a common trend: UGP
and UGP-SEL produce results that are comparable
between each other and outperform GSGP on all the
studied test problems. Interestingly, the models pro-
duced by the BLs are effectively improved in the evo-
lutionary process. In fact, both UGP and UGP-SEL
have steady improvement in terms of fitness during
the whole evolution. Additionally, UGP-SEL is able
to reduce the computational time needed for obtain-
ing good quality models for the Energy benchmark.
Hence, the selection of the best models produced by
the BLs, that is typical of UGP-SEL, is not detrimen-
tal and, on the contrary, can speed up the search pro-
cess for some problems. Also, GSGP produces a stan-
dard deviation (grey area surrounding the GSGP line
in the plots) that, while presenting an acceptable mag-
nitude, is larger than the one produced by UGP and
UGP-SEL. We conclude that using GP for evolving
models obtained from other ML techniques provides
a beneficial effect on the final model, that is character-
ized by a lower error and a lower standard deviation
with respect to the one produced by GSGP.
While results achieved on the training instances
are important, the performance on the test set is a
fundamental indicator to assess the robustness of the
model with respect to its ability in generalizing over
unseen data. This is a property that must be ensured
in order to use an ML technique for addressing a real-
world problem. As one can observe from Figure 1, in
all the considered benchmarks, UGP and UGP-SEL
are able to generalize well over unseen instances, out-
performing GSGP on all the studied problems. Also
on the test set, UGP and UGP-SEL are able to im-
prove the performance of the models produced by the
BLs and, even more interesting, are able to combine
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
118
(a) (b) (c)
(d) (e) (f)
Figure 1: Results on training (a,c,e) and test sets (b,d,f). Median over 30 runs. Plot (a,b): Energy dataset.
Plot (c,d): Concrete dataset. Plot (e,f): Parkinson dataset.
these models for obtaining a final solution that corre-
sponds to a ”blend” of different ML techniques. The
final solution produces good performance over the
training data as well as a good generalization ability
and it is characterized by a lower standard deviation
with respect to GSGP. All in all, the idea of using GP
as a universal learning method seems very promising.
To assess the statistical significance of the results
presented in Figure 1, a statistical validation was per-
formed. First of all, given it is not possible to as-
sume a normal distribution of the values obtained by
running the different techniques, we ran the Lilliefors
test, using α = 0.05. The null hypothesis of this test is
that the values are normally distributed. The result of
the test suggests that the null hypothesis should be re-
jected. Hence, we used the Mann-Whitney U test for
comparing the results returned by the different tech-
niques considered under the null hypothesis that the
distributions are the same across repeated measures.
Also in this test, a value of α = 0.05 was used and
the Bonferroni correction was considered. Table 2 re-
ports the p-values returned by the Mann-Whitney test.
A bold font is used to denote values suggesting that
the alternative hypotheses cannot be rejected (statisti-
cally significant results). According to this study, for
all the studied benchmarks, UGP and UGP-SEL ob-
tained models that are better (i.e., with lower error)
than the ones produced by GSGP and the differences
in terms of error are statistically significant on both
training and test data.
To gain a full comprehension of the dynamics of
UGP, the second part of the experimental phase ana-
lyzes the contribution provided by the different BLs
in the construction of the final model. The objective
is to understand what are the sub-components of the
final solution that were formed thanks to a blend of
different ML techniques. To answer this question, we
Table 2: P-values returned by the Mann-Whitney test for
the benchmarks considered. Bold values used to denote sta-
tistically significant results.
Energy
Training Test
UGP UGP-
SEL
UGP UGP-
SEL
GSGP 3.6E-21 3.6E-21 3.6E-21 3.6E-21
UGP - 4.4E-21 - 3.2E-12
Concrete
Training Test
UGP UGP-
SEL
UGP UGP-
SEL
GSGP 3.6E-21 3.6E-21 3.6E-21 3.6E-21
UGP - 0.52 - 0.53
Parkinson
Training Test
UGP UGP-
SEL
UGP UGP-
SEL
GSGP 3.6E-21 3.6E-21 3.6E-21 3.6E-21
UGP - 0.27 - 0.04
perform the following analysis: we associate to each
candidate solution a vector, whose length is equal to
the number of used BLs, plus one. Each component
of this vector will be associated with a different BL,
and the further component will be associated to GP.
For all the individuals initialized randomly (with the
ramped-half-and-half technique in our case), the po-
sition of the vector corresponding to GP is initialized
with a value equal to 1, while all the other positions
are initialized with a value equal to 0. For each model
generated by a BL, the vector is initialized with a
value equal to 1 in the position corresponding to that
BL, and 0s in all other positions. After each crossover
Universal Learning Machine with Genetic Programming
119

event, we summed up the vectors of the parents to ob-
tain a new vector that can, in some senses, be inter-
preted as the “fingerprint” of the child. In this way,
at the end of the evolutionary process, we are able to
quantify the contribution of each BL and of GP itself
to the construction of the final solution. Theoretically,
an individual that has a value equal to the number of
crossover events in the position of the vector corre-
sponding to GP, and a value equal to 0 is all other
positions is a model that has been generated purely
by GP, without any contribution from any of the BLs.
On the other hand, the values in the positions corre-
sponding to the BLs quantify the contribution of the
various BLs in the formation of that individual. The
results of this analysis are reported in Figure 2 and
in Figure 3, where the values contained in the vec-
tor associated to the best individual at the end of the
evolution are reported, after having been normalized
in a [0, 1] scale. Figure 2 reports the results for UGP,
while Figure 3 shows the analogous results for UGP-
SEL.
The first important observation is that none of
the best-evolved models (neither the ones evolved by
UGP nor the ones evolved by UGP-SEL) is a purely
GP-evolved individual. All of them have an impor-
tant contribution by the BLs. Furthermore, only in
one case, the final model is formed by a 100% contri-
bution from only one BL. It is the case of UGP-SEL
in the Energy dataset, reported in Figure 3(a), where
the final model was formed by a 100% contribution of
SVR. In all other cases, the final model is formed by
a blend between different BLs and GP. Before contin-
uing with the analysis of Figures 2 and 3, it is impor-
tant to point out that if an individual is formed by a
100% contribution of one BL, this does not necessar-
ily mean that the final model was the one generated by
that BL, and used to initialize the GP population. In-
deed, in GP it is possible to have a crossover between
one individual and itself, and when GSOs are used
(as in this work), the offspring is an individual that is
very different from the parent. Indeed, what happened
with UGP-SEL in the case of the Energy dataset (Fig-
ure 3(a)) is that the final model was obtained by vari-
ous crossovers between individuals that, although dif-
ferent between each other, are all descendants from
the model generated by SVR. This is proven by the
fact that the curve of the evolution of UGP-SEL for
this problem is not constant (see Figure 1(a)), but the
error is steadily decreasing along with the evolution.
Thus, the final model is not the one generated by SVR
and used in the initialization, but an improvement of
it.
Analyzing Figures 2 and 3 more in detail, one
can remark that on the Energy dataset the final model
was only influenced by SVR in the case of UGP-SEL
(Figure 3(a)), while the best solution is obtained by
a blend of LR and SVR in the case of UGP (Fig-
ure 2(a)). In the latter case, the model consists of a
contribution of 98% given by LR and the remaining
2% by SVR. Looking back at Figure 1, it is interesting
to notice that while UGP and UGP-SEL performed
in a comparable manner, the best solutions they pro-
duced have been formed by combining different BLs.
This observation further corroborates the importance
of semantics: despite the solutions having completely
different structures, because they are formed by re-
combinations of models generated by different BLs,
they have a similar behaviour, that is what matters for
assessing the models’ performance. Taking into ac-
count the Concrete dataset, it is possible to see that the
final model of UGP (Figure 2(b)) was generated using
a contribution of approximately 40% of GP, 35% of
LR, 20% of MLP, and 5% of SVR. On the same prob-
lem UGP-SEL (Figure 2(c)) behaves similarly but,
with respect to UGP, a more important contribution
to the construction of the best model is given by GP
and LR, while MLP and SVR decreased their con-
tribution. Finally, on the Parkinson benchmark, we
have a similar situation where both UGP and UGP-
SEL built a final model with a contribution of approx-
imately 55% of SVR, 30% of GP, 10% of LR, and 5%
of MLP (Figures 2(e) and 2(f)).
To conclude the experimental study, we focused
on UGP-SEL and we analyzed the number of times in
which the model generated by a BL was selected to
be inserted in the initial population, using the selec-
tion process described in Section 3.1. This analysis is
reported in Figure 4.
Remembering that each one of the independent
runs that we have performed uses a different train-
ing/test partition of the data, and thus also the ini-
tial models generated by the BLs are different be-
tween each other in the different runs, we can ob-
serve that for the Energy problem (Figure 4(a)), in
more than 60% of the runs both the models generated
by LR and SVR are inserted in the initial population,
while in the remaining runs only the model generated
by SVR was selected and inserted in the initial popu-
lation. On the Concrete dataset (Figure 4(b)), in more
than 40% of the runs all the studied BL models (SVR,
LR and MLP) were selected to be part of the initial
population, and in more than 30% of the runs the
models that were selected and inserted in the initial
population were the ones generated by LR and MLP.
Looking back at the results of Figure 3, we can see
that the evolutionary process is able to combine the
solutions composed by the aforementioned BLs, im-
proving them; but, despite that, the final model was
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
120

(a) (b) (c)
Figure 2: Percentage contribution provided by the different BLs for building the best final model for UGP.
Plot (a): Energy dataset. Plot (b): Concrete dataset. Plot (c): Parkinson dataset.
(a) (b) (c)
Figure 3: Percentage contribution provided by the different BLs for building the best final model for UGP-SEL.
Plot (a): Energy dataset. Plot (b): Concrete dataset. Plot (c): Parkinson dataset.
(a) (b) (c)
Figure 4: Techniques that provided the best model after the initial selection phase. Plot (a): Energy dataset.
Plot (b): Concrete dataset. Plot (c): Parkinson dataset.
built also with a 40% contribution of GP. Hence,
also for the Concrete dataset, the evolutionary process
seems to be able to improve the performance of “sim-
ple” models (i.e. generated with the contribution of
only one technique) more easily with respect to “hy-
brid” models (i.e. formed thanks to a blend of more
than one technique). Finally, Figure 4(c) presents the
results obtained on the Parkinson dataset. In this case,
we can observe that the models generated by SVR are
always selected to be inserted in the initial population.
More than 40% of the times, the models that are in-
serted in the initial population are the one generated
by SVR and the one generated by LR, while approx-
imately 30% of the times the models inserted in the
initial population are the ones generated by the three
studied BLs (i.e. SVR, LR, and MLP). This result is
consistent with the one reported in Figure 3(f), where
the most important contribution for the construction
of the final best model for this problem is provided by
SVR. Anyway, also for this dataset, an important con-
tribution to the final model is provided by GP itself.
This observation strengthens the previous conjecture:
for GP, improving “simple” models is easier than im-
proving “hybrid” ones. In conclusion, the experimen-
tal study allowed us to discover interesting insights
about UGP and UGP-SEL. In particular, UGP and
UGP-SEL behave similarly to ensemble techniques
for their ability in producing robust models, as well
as reducing the variance bias. Additionally, the best
model returned by both UGP and UGP-SEL always
consists of a composition of different contributions
from more than one ML technique.
5 CONCLUSIONS AND FUTURE
WORK
The objective of this paper was to present a proof of
concept, and the paper was conceived as a beginning
step in a long and promising research track. The sci-
entific question behind this work is if Genetic Pro-
gramming (GP) can be used as a “universal” Ma-
chine Learning (ML) system. In this context, with
the term universal, we mean a system able to join
several (and potentially even all existing) ML algo-
rithms (called Basic Learners – BLs –), and, in the
worst case, always return the best model generated by
any of these algorithms. The idea developed in this
work consists of using several ML models to seed
Universal Learning Machine with Genetic Programming
121

a GP population. The major obstacle to this idea is
bound to representation: all the used models should
employ the same representation, and this representa-
tion should be “usable” by GP. This obstacle is by-
passed by the use of Geometric Semantic GP (GSGP),
that is able to completely abstract from the represen-
tation. These ideas have been implemented in two
systems that were presented in this paper: a first sys-
tem called Universal GP (UGP), and its variant, called
selective UGP (UGP-SEL), where only a subset of the
models generated by the BLs are selected and retained
in the initial population, in order to limit overfitting.
The suitability of UGP and UGP-SEL has been tested
on three real-life symbolic regression problems. UGP
and UGP-SEL have been compared with GSGP and
the BLs themselves, that in this preliminary work
were linear regression, support vector regression and
multi-layer Perceptron. UGP and UGP-SEL have
clearly outperformed all these methods in a statisti-
cally significant way. Furthermore, our experimental
study has clearly shown that the final models returned
by UGP and UGP-SEL are often obtained by a blend
of different models generated by different ML algo-
rithms.
In spite of the very promising results presented in
this paper, the work is still in an initial phase, and
a lot of work is expected in the near future. First,
given that this work was just intended as a first proof
of concept, only three BLs were used so far. On the
other hand, in order to exploit the potentiality of the
idea, many different BLs have to be used. Also, better
ways of joining the models generated by the BLs, by
means of specific and new types of crossover, deserve
investigation.
ACKNOWLEDGMENT
This work was supported by national funds through
FCT (Fundac¸
˜
ao para a Ci
ˆ
encia e a Tecnologia) un-
der project DSAIPA/DS/0022/2018 (GADgET) and
project PTDC/CCI-INF/29168/2017 (BINDER).
Mauro Castelli acknowledges the financial support
from the Slovenian Research Agency (research core
funding No. P5-0410).
REFERENCES
Castelli, M., Silva, S., and Vanneschi, L. (2015a). A
c++ framework for geometric semantic genetic pro-
gramming. Genetic Programming and Evolvable Ma-
chines, 16(1):73–81.
Castelli, M., Trujillo, L., Vanneschi, L., and Popovi
ˇ
c, A.
(2015b). Prediction of energy performance of resi-
dential buildings: A genetic programming approach.
Energy and Buildings, 102:67 – 74.
Castelli, M., Vanneschi, L., and Silva, S. (2013). Prediction
of high performance concrete strength using genetic
programming with geometric semantic genetic opera-
tors. Expert Systems with Applications, 40(17):6856 –
6862.
Castelli, M., Vanneschi, L., and Silva, S. (2014a). Predic-
tion of the unified parkinson’s disease rating scale as-
sessment using a genetic programming system with
geometric semantic genetic operators. Expert Systems
with Applications, 41(10):4608 – 4616.
Castelli, M., Vanneschi, L., Silva, S., and Ruberto, S.
(2014b). How to exploit alignment in the error space:
Two different gp models. In Genetic Programming
Theory and Practice XII, Genetic and Evolutionary
Computation, pages 133–148, Ann Arbor, USA.
Koza, J. R. (1992). Genetic Programming: On the Pro-
gramming of Computers by Means of Natural Selec-
tion. MIT Press, Cambridge, MA, USA.
Moraglio, A., Krawiec, K., and Johnson, C. (2012). Ge-
ometric semantic genetic programming. In Parallel
Problem Solving from Nature - PPSN XII, volume
7491 of Lecture Notes in Computer Science, pages
21–31. Springer Berlin Heidelberg.
Sipper, M., Fu, W., Ahuja, K., and Moore, J. H. (2018).
Investigating the parameter space of evolutionary al-
gorithms. BioData Mining, 11(1):2.
Vanneschi, L., Castelli, M., Manzoni, L., and Silva, S.
(2013). A new implementation of geometric seman-
tic GP and its application to problems in pharmacoki-
netics. In Proceedings of the 16th European Con-
ference on Genetic Programming, EuroGP 2013, vol-
ume 7831 of LNCS, pages 205–216, Vienna, Austria.
Springer Verlag.
Vanneschi, L., Castelli, M., and Silva, S. (2014a). A survey
of semantic methods in genetic programming. Genetic
Programming and Evolvable Machines, pages 1–20.
Vanneschi, L., Silva, S., Castelli, M., and Manzoni, L.
(2014b). Geometric semantic genetic programming
for real life applications. In Genetic Programming
Theory and Practice XI, pages 191–209. Springer
New York.
Wolpert, D. H. and Macready, W. G. (1997). No free
lunch theorems for optimization. Trans. Evol. Comp ,
1(1):67–82.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
122
