
On Improving 3D U-net Architecture
Roman Janovský
a
, David Sedláček
b
and Jiří Žára
c
Faculty of Electrical Engineering, Czech Technical University in Prague, Technicka 2, Praha 6, Czechia
Keywords: Point Cloud, Segmentation, Neural Network, U-net, Voxel Grid.
Abstract: This paper presents a review of various techniques for improving the performance of neural networks on
segmentation task using 3D convolutions and voxel grids – we provide comparison of network with and
without max pooling, weighting, masking out the segmentation results, and oversampling results for
imbalanced training dataset. We also present changes to 3D U-net architecture that give better results than the
standard implementation. Although there are many out-performing architectures using different data input,
we show, that although the voxel grids that serve as an input to the 3D U-net, have limits to what they can
express, they do not reach their full potential.
1 INTRODUCTION
Convolutional neural networks are foundation for
many computer vision tasks, e.g. image recognition,
object classification, semantic segmentation, and
other. With introduction of consumer-grade RGB-D
cameras it became important to process 3D data
efficiently for which 3D convolutions can be used.
In this paper we focus on the task of part
segmentation, as it has many uses. However, various
data representations can serve as input to the
segmentation. It can be either sparse point cloud,
depth images, or even mesh. This data can be
augmented by additional information such as normal
or colour. All these representations are missing a
regular structure that could be used with
convolutions, though extensive research was done to
overcome this as described in Section 2. Very
straightforward way is transforming the input data
into a regular grid, where the 3D convolutions can be
used fully exploiting the information about locality.
For this task, 3D U-nets are very effective as they
learn global structure and local information at the
same time.
Segmentation is commonly used for labelling,
where it can be useful especially in the case of
augmented reality and work process. The user, given
a task, has to find a part that should be maintained and
segmentation could help him to find the correct part
a
https://orcid.org/0000-0001-7947-867X
b
https://orcid.org/0000-0003-0973-0248
c
https://orcid.org/0000-0003-2612-7942
he should focus on. This could be used as a guide for
the maintainer, or as a tool to teach new hires.
Segmentation can be also used as a postprocessing
step for object reconstruction from images, where
often unneeded parts of background can be removed.
Other use cases are generation of map layers from
satellite imagery such as (Hofmann and Kowshik,
2018), or in an asset creation to search for similar
objects, or components for the artist to get inspired. It
is also used for biomedical analysis (Milletari et al.,
2016), (Çiçek et al., 2016) like tumour detection.
In the case of point cloud segmentation, many
solutions exist and many of these are implemented in
libraries like PCL (Rusu and Cousins, 2011). These
solutions are mostly based on clustering, or cuts,
which often require user input, or provide only
clusters based on similarity. These clusters are
usually too detailed and have to be grouped manually.
Feature-based solutions can be also used, however
most of the existing features for point clouds are
handcrafted towards a specific task and it might not
be trivial to find their optimal combination. In the
case of biomedical data, the shapes can be hard to
parametrize, so there was need for more expressive
solution. As such, we believe the best way to be in the
direction of data-oriented machine learning like
neural networks. They can learn almost anything
given enough annotated data (for supervised training)
and can be easily extended to new objects or tasks by
Janovský, R., Sedlá
ˇ
cek, D. and Žára, J.
On Improving 3D U-net Architecture.
DOI: 10.5220/0007830306490656
In Proceedings of the 14th International Conference on Software Technologies (ICSOFT 2019), pages 649-656
ISBN: 978-989-758-379-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
649

training them on this new data. Thus, in the rest of the
paper, we will focus on using the convolutional neural
networks for segmentation. As the neural networks
need to be trained, various datasets being made
publicly available for such tasks, e.g. ModelNet (Wu
et al., 2015), or ShapeNet (Yi et al., 2016), make the
training much easier.
Though we are aware of the shortcomings of
using 3D convolutions and voxel grids, e.g. feature-
pose correlation as described in (Sabour et al., 2017)
or the redundant operations on sparse voxels, we
firmly believe that this approach can still be
improved. Furthermore, as we focus on the task of
model segmentation, the required input data will not
suffer too much from down-sampling the data into a
regular grid as would be a case of scene segmentation
from RGB-D frames. In addition, regularizing the
data into a grid can mitigate some noise, that can be
introduced in the data. The voxel grid can also be
easily constructed from mesh, point cloud, or depth
image.
The structure of the paper is as follows. First, we
introduce existing solutions that influenced our work
in Section 2. Then we explain our network
architecture and training settings in Section 3
followed by definition of a baseline, its description,
and results of our experiments in Section 4.
2 PREVIOUS WORK
Neural networks work very efficiently over structured
data such as 2D images, or 3D voxel grids as it can
fully and easily utilize the parallelism of the GPU. As
such, it leads to the use of voxel grids as they are
compatible with 3D-convolutions. (Qi et al., 2016),
(Wu et al., 2015), and (Maturana and Scherer, 2015)
uses binary voxel grids for object classification and
object segmentation. (Çiçek et al., 2016) and
(Milletari et al., 2016) use 3D-convolutions for one-
stage part segmentation of medical data via U-net
architecture.
As voxel grids suffer from heavy memory
requirements and too many unneeded multiplications
by zero in empty voxels, hierarchical approaches
were introduced. Kd-trees and octrees are good
candidates with their regular structure as shown by
Kd-networks (Klokov and Lempitsky, 2017), or O-
CNN (Wang et al., 2017), and OctNet (Riegler et al.,
2017) that uses hybrid grid of shallow octrees.
Neural networks proved to work well for 2D
images, so multi-view CNNs (Kanezaki et al., 2018),
(Qi et al., 2016), (Su et al., 2015) render 3D point
cloud from multiple angles into 2D images and apply
2D-convolutions. These networks work really well
for tasks as object classification, retrieval, or pose
estimation. However, when the point cloud is
rendered it loses information in the presence of self-
occlusion. As such, these architectures are not well
suited for per-point segmentation tasks.
PointNet (Qi et al., 2017) is the first network that
uses unordered point cloud as its input data. It uses
channel-wise max pooling to aggregate per-point
features into a global feature. Furthermore, this
operation is permutation invariant and with the
network shared between every point, the network is
invariant to the point permutation. However, the
network does not include spatial information as
standard convolution does. The new PointNet++ (Qi
et al., 2017) groups points into a hierarchical
structure. SO-Net (Li et al., 2018) imposes structure
to the point cloud using self-organizing map to model
the distribution of the point cloud. A position of each
point in respect to the k-nearest neighbours on the
map is used as an input to the network. PointNet
architecture is further used in Similarity Group
Proposal Network (Wang et al., 2018) which learns
similarity matrix upon PointNet/PointNet++ feature
vector.
Recently, architectures simulating convolutions
over point patches are emerging with the state-of-the-
art segmentation results. PointCNN (Li et al., 2018)
reports 86.14% on ShapeNetParts. PointCNN
introduces X-conv operator that first individually lifts
points to higher dimension, learns transformation
matrix, and then applies convolution. Similarly,
effective is SpiderCNN (Xu et al., 2018) that
parametrizes general convolution filter.
3 NETWORK
Although other architectures proved to yield superior
results, we try to improve 3D U-net for segmentation
of a point cloud as we believe that the architecture
could still be improved. We propose the use of 3D
voxel occupancy grid as it can be constructed simply
and fast from point cloud, mesh, or depth image.
Furthermore, 3D-convolution networks can be
trained on a small dataset and yield good results as
shown in medical applications by (Çiçek et al., 2016)
or (Milletari et al., 2016). Our aim is to achieve better
results by modifying such architectures, applying
different techniques, and to prove it by a serious
comparison of results.
ICSOFT 2019 - 14th International Conference on Software Technologies
650
3.1 Network Architecture
Our network is a 3D U-net (Çiçek et al., 2016) type
of neural network with added category classification.
The category prediction of the voxel grid is not
required, e.g. for segmenting out objects in a room, or
for segmentation of medical data. Thus, the 3D U-net
in itself does not require prior knowledge about the
category of the input. However, during the training,
when using this prior knowledge as an addition to the
loss function, the network does yield better results.
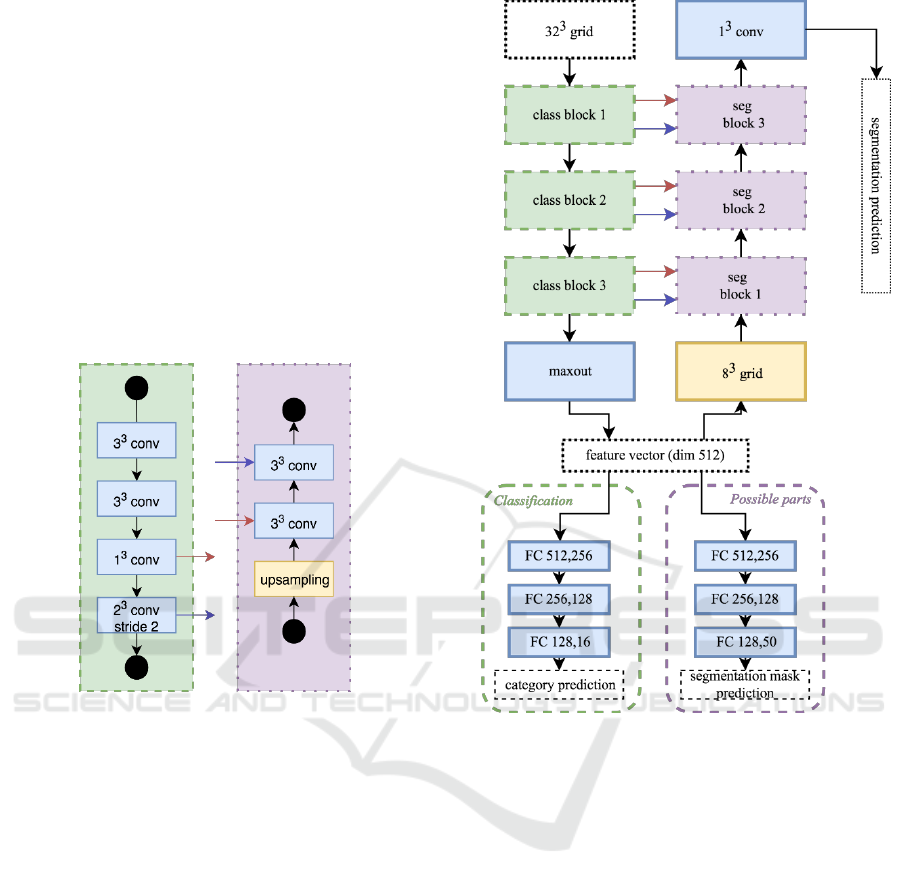
The network is composed of two parts:
classification (down-sampling) and segmentation
(up-sampling) as depicted in Figure 2. Each part
consists of three blocks.
a) Classification block b) Segmentation block
Figure 1: Basic building blocks of a) classification on the
left, and b) segmentation layer on the right.
The main building block of the classification part
of our network is shown in Figure 1 a). We apply two
3D convolutions with zero padding to keep the
dimensions of the input, which are followed by batch
normalization. The results are then concatenated, and
convolution of size 2
3
with stride 2 is applied to half
the resolution of the input grid.
After each convolution, we use batch
normalization (Ioffe and Szegedy, 2015) and dropout
(Srivastava et al., 2014). ReLU (Nair and Hinton,
2010) activation function is used for the classification
part, and softplus (Zhao et al., 2018) for the
segmentation (except for the last prediction layers).
After the third classification block, we use maxout
(Goodfellow et al., 2013) to convert the grid into a
one-dimensional vector of size 512, which is fed into
the classification multilayer perceptron (MLP) and
softmax layer. We also use the feature vector to
estimate mask for all possible object parts.
Figure 2: Architecture of our U-net neural network with
category prediction and segmentation.
The feature vector is tiled into a grid of size 83 which
is the input into the segmentation part. The
segmentation part of the network uses blocks as
depicted in Figure 1 b). The first convolution of
segmentation block down-samples the number of
channels to the half of the input voxel grid, i.e. with
the input number of channels C
i
, and C
s
channels from
skip connection we have C
i
+C
s
filters of size C
i
/2.
The following segmentation block uses the up-
sampled grid from previous block. If not said
otherwise, we also zero-pad the input grid to keep its
dimensions.
As there will always be a loss of information when
up-/down-sampling, we try to compensate this by
using skip connections. We add output of the strided
convolutions right before up-sampling and output of
1
3
convolution right after up-sampling.
On Improving 3D U-net Architecture
651

3.2 Implementation Details
Our network is implemented using TensorFlow
(Abadi et al., 2015). We use Adam optimization
(Kingma and Ba, 2014) to minimize sum of softmax
cross entropies – sum over segmentation, sum over
possible mask, and sum over category. We also
multiply the input segmentation by the occupancy
grid, so that the network focuses on minimizing valid
voxels. We use the Adam optimization with an initial
learning rate of 0.0001 and batch size of 16. We
decrease the learning rate by 0.75 each five epochs.
The network generally converges around the 10
th
epoch with batch normalization. We also apply
gradient clipping in range <-1,1>. Each layer is
followed by dropout layer with keep probability 75%.
4 EXPERIMENTS
The performance of our network has been evaluated
on two different applications – object classification
and part segmentation. In this chapter, we describe
data used, our baseline network, changes to the
architecture, and report how they affect the training
and network generalization.
4.1 Metrics
For comparison of part segmentation results we use
weighted average Intersection over Union (IoU) as
provided by (Yi et al., 2016). Per category average
IoU is computed for each category first by averaging
across all parts of all shapes with the certain category
label. The overall average IoU is then computed
through a weighted average of a per-category IoU.
The weights are the number of samples in each
category. To compare ourselves on object
classification task we use per instance accuracy on
ModelNet (Wu et al., 2015).
4.2 Datasets
For object classification we use two variants of
ModelNet (Wu et al., 2015), i.e. ModelNet40 and its
subset ModelNet10. The ModelNet40 contains
13,834 objects from 40 different categories, where
9,834 are used as training samples and 3,991 as the
test samples. ModelNet10 has 2,468 training samples
and 909 test samples. Since the original ModelNet
contains models represented by edges and vertices,
we use pre-generated dataset of point clouds from
authors of PointNet++ (Qi et al., 2017), where each
model is uniformly sampled by 10,000 points.
For the part segmentation task, we use
ShapeNetPart dataset (Yi et al., 2016). It contains
16,881 objects in 16 categories, represented as point
clouds. Each object consists of 2 to 6 parts with 50
parts in total, where an object does not need to have
all category parts. We use the formal split, where
dataset is split into 12,137 objects for the train set,
1,870 objects for the validation set, and 2,874 objects
for the test set.
4.3 Baseline Network
We based our network on the standard 3D U-net
architecture. The baseline network has similar
structure to network depicted in Figure 2. However,
each block consists of two 3
3
convolution layers
followed by max pooling instead of 2
3
convolutions
with stride 2. The baseline also uses convolution 4
3
instead of maxout. The filter output size is
(32,64,128) for the classification blocks and
(256,128,64) for the segmentation blocks. The
baseline network has ~13.3M trainable parameters
and uses only ReLU as activation function.
With the baseline and no modifications to the
dataset we were able to reach 78.8% IoU. However,
the training suffered from category imbalance (Figure
4) because the network tends to overfit on categories
with higher number of samples. We discuss the
problem in the following sections.
4.4 Removing Max Pooling
As max pooling can lead to the loss of information,
we tried to replace max-pooling layers with
convolution layers of size 2
3
and stride 2. They halve
the resolution and double the number of channels.
This made the training more stable, but increased the
number of trainable parameters to ~19.5M, where
most of it was contributed by the 4
3
convolution, that
was used instead of the maxout layer in Figure 2.
Replacing the max pooling raised the IoU to 80.5%.
Though this increased the overall performance,
the network still fails at small parts as thin straps, or
very low-detailed transitions such as gas tank/saddle
and motorbike body, or transition between the tip and
the rest of the rocket. Ground truth for these
categories is shown in Figure 3.
4.5 Category Imbalance
As shown in Figure 4, the ShapeNetPart dataset
suffers from category unbalance, where in the train
set table category has 100 times more samples than
the cap category. As such, the network is likely to
ICSOFT 2019 - 14th International Conference on Software Technologies
652

learn more on these large categories, because the
accumulated loss will be higher for the large
categories. The same goes for the test set, where the
categories table, chair, and airplane contribute to the
result by 65%. Figure 5 shows how can large
categories influence the weighted IoU in comparison
to the average.
Figure 3: Ground truth for problematic categories - bag,
earphones, rocket, and motorbike. Especially, the red strap
for the bag (top left), green straps for the earphones (top
right), green tip of a rocket (bottom right), and motorbike
parts except the yellow body (bottom left) are often
misclassified as neighbouring parts.
We considered simple weighting based on the
distribution of the data, but given the fact that for
large categories the value is close to zero and for
small categories it is evenly distributed, it did not
significantly change the training. As the simple
weighting did not help, we tried to apply probabilistic
weights, which is discussed in the following section.
4.6 Probabilistic Weights
Softmax function takes the input vector and
normalizes the sum of the vector to 1 where each
element is in range <0,1>. Given these properties, it
can also be interpreted as a probabilistic distribution
saying how likely is each part.
We use these probabilities to weight the output of
the softmax cross entropy loss function by (2-P),
where P is the estimated probability of the correct
label. This way the voxels with lower probability
have higher impact on the training. Even though it
improved the overall IoU, it did not solve the problem
with category imbalance.
Weighting also proved to have a regularization
effect, lowering the variance between test and train
data. When weighting was not used the cost and
accuracy on the train set would decrease and increase
respectively, but the accuracy on the test data was
decreasing as the network started to overfit. With the
weighting applied the network tries not to favour any
voxel and thus slowing the overfitting process. In
respect to the backpropagation the weighting works
as additional max term for the correct label whereas
Figure 4: Number of samples per category. ShapeNetPart
training (blue) and test (red) data sample distribution among
the 16 categories.
the loss itself maximizes the difference between
correct label and the others.
Though the network learned better on the hard
categories like cap, rocket, or motorbike, it did not
improve the weighted average IoU.
4.7 Oversampling
When using random permutation of the dataset for
each training epoch, the final result depends on the
luck of the draw, i.e. when the small categories are
not in one of the last batches, their IoU drastically
drops. This can be seen in Figure 6, where the blue
line shows weighted average IoU with value of 82%.
However, the categories with high number of samples
contribute to the overall IoU the most, and as such
there is a significant drop in harder categories like
cap, motorbike, or rocket.
To prevent this behaviour, we oversample the
training set so that each category contains the same
number of samples as the largest category, and each
batch has exactly one sample from each category.
We trained the network again but with
oversampling. For comparison, we took this newly
trained model and compared it with a network trained
without oversampling, but having similar IoU.
The results comparing training with/without the
oversampling are shown in Figure 6, red without
oversampling and green with oversampling. Both
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Airplane
Bag
Cap
Car
Chair
Earphone
Guitar
Knife
Lamp
Laptop
Motorbike
Mug
Pistol
Rocket
Skateboard
Table
Train set distribution Test set distribution
On Improving 3D U-net Architecture
653

these networks do clearly overfit less, however with
oversampling, the network outperforms on the hard
categories (cap, earphone, motorbike, rocket).
Oversampling increases the training time and
prevents the overfitting, but lowers the overall
accuracy reaching 80.9% IoU. As it repeats some
samples multiple times, we tried simple data
augmentation, i.e. rotation and scale of the point cloud.
Figure 5: The influence of largest categories on weighted
IoU. Case when the three largest categories in test set, as
can be seen in Figure 4 (table, airplane, chair), keeps the
weighted IoU on 82% even though the average is lower –
72% marked in graph by red solid line.
When compared with weighting, data augmentation
had better regularization effect, and got the IoU at
maximum of 82.2%, whereas with the weighting it
reached its maximum at 80.8%.
4.8 Segmentation Mask
Convolutional neural networks are good at finding the
overall structure of the input data, but do not handle
well correct placement of each respective parts often
thanks to the max pooling, i.e. it does not matter
where the eye in the face is as long as it is there.
We tried to leverage the category classification
capabilities by converting the predicted category into
a mask to remove category misclassifications as the
network can reach 97.5% category prediction
accuracy on the test data.
We tried two different approaches: a) learn the
mask during training, and b) generate the mask from
predicted category.
As for a) learning the mask, we tried to learn two
different masks – all possible parts for category and
all possible parts for given sample; does not need to
have all category parts like standing/hanging lamp.
Both approaches led to similar results, however
learning mask for given sample yields slightly better
results.
Approach b) gave cleaner results, but category
misclassifications became more apparent. However,
when the category is misclassified most of the voxels
are misclassified as well. Moreover, most of the parts
are misclassified in its own category, except
categories like cap, rocket, earphone, and lamp,
Figure 6: Comparison of evaluation on the test set, when
trained with and without oversampling. For this
comparison, learned models with similar wIoU are used.
The network model used is the variant of baseline
architecture with convolutions instead of max pooling.
where significant number of voxel misclassifications
is in different category. As such, masking out the
segmentation results as postprocess seems like a valid
strategy that does not introduce too much
inaccuracies when applied on not-fully trained
network.
Though the IoU was not improved, when we
compared confusion matrices, the misclassifications
were more focused in the categories themselves.
4.9 Segmentation Results
As the network has large number of trainable
parameters, where most of them are from the last
down-sampling layers, we replaced the last
4
3
convolution with maxout (Goodfellow et al., 2013)
lowering the number of trainable parameters to
~11.1M without affecting the performance.
The network can be trained in 16 hours with inference
time of 20ms per sample. We use
augmentation, oversampling, and learn the
segmentation mask, though we don’t apply the mask.
We also tried various activation functions for the
72,01%
0 20 40 60 80 100
Airplane
Bag
Cap
Car
Chair
Earphone
Guitar
Knife
Lamp
Laptop
Motorbike
Mug
Pistol
Rocket
Skateboard
Table
Per-category IoU (%)
30
40
50
60
70
80
90
100
Airplane
Bag
Cap
Car
Chair
Earphone
Guitar
Knife
Lamp
Laptop
Motorbike
Mug
Pistol
Rocket
Skateboard
Table
Per-category IoU (%)
82% IoU, no oversampling
80.8% IoU, no oversampling
80.9% IoU, oversampling
ICSOFT 2019 - 14th International Conference on Software Technologies
654
Table 1: Object part segmentation results on ShapeNetPart dataset.
segmentation part with softplus function (Zhao et al.,
2018) yielding best results.
We present our results in Table 1, where we
compare our results with the state-of-the-art methods
for object part segmentation. It can be seen that our
network falls behind most of the architectures. Our
network suffers from having not enough local
information. However, simply increasing the
resolution of the input voxel grid doesn’t improve the
results: doubling the resolution slightly lowered the
accuracy. To improve the local information, we tried
to change the input to a vector per voxel, where the
vector is composed from directions from the voxel
mean to k-nearest points. Though not yielding notable
results, the voxel grid could serve as a look-up table
for other methods struggling with global structure
encoding.
4.10 Classification Results
The network used for tests on ModelNet10 and
ModelNet40 was the same network as depicted in
Figure 2 although we stripped the network of all parts
that are required for segmentation. Resulting network
has ~2.2M trainable parameters. With oversampling
and augmentation, the training time per sample is
25ms and inference time is 3ms. We trained the
network on ModelNet10/40 with batch size of 40. The
network can be trained in 12 hours on ModelNet40.
As shown in Table 2, we compare ourselves with
other approaches also used for segmentation.
Moreover, we include 3DShapeNets (Wu et al., 2015)
since they use a voxel grid as an input and
RotationNet (Kanezaki et al., 2018) as the best
reported result on Princeton ModelNet.
To the best of our knowledge, we outperform or
match most of the existing solutions for object
classification using voxel grids, although each
network was fine-tuned on different type of
application. However, in comparison with
architectures working on other data structures our
approach does not reach notable results.
Table 2: Object classification results on ModelNet10 and
ModelNet40 for methods using point cloud, voxel grid, Kd-
tree, octree, or self-organizing map as an input. Networks
using voxel grids are listed under the dashed line.
5 CONCLUSION
In this paper, we had presented modifications to
3D U-net architecture and in the series of experiments
shown their influence on the training process and
ability to generalise. We show improvements from
the baseline architecture by 3% on the segmentation
task. As voxel grids provide hierarchical global
information, we see a promising way to further
improve the voxel-based architectures by combining
it with approaches focused more on local features, or
with refinement methods.
ACKNOWLEDGEMENTS
This work is supported by Ministry of Education,
Youth and Sports within the project Key technologies
for Time-Of-Flight sensor data processing and
Method
Intersection over Union (IoU)
Mean
air.
bag
cap
car
chair
ear.
gui.
knife
lamp
lap.
motor
mug
pistol
rocket
skate
table
Kd-Net
82.3
80.1
74.6
74.3
70.3
88.6
73.5
90.2
87.2
81.0
94.9
57.4
86.7
78.1
51.8
69.9
80.3
PointNet
83.7
83.4
78.7
82.5
74.9
89.6
73.0
91.5
85.9
80.8
95.3
65.2
93.0
81.2
57.9
72.8
80.6
SO-Net
84.9
82.8
77.8
88.0
77.3
90.6
73.5
90.7
83.9
82.8
94.8
69.1
94.2
80.9
53.1
72.9
83.0
PointNet++
85.1
82.4
79.0
87.7
77.3
90.8
71.8
91.0
85.9
83.7
95.3
71.6
94.1
81.3
58.7
76.4
82.6
SpiderCNN
85.3
83.5
81.0
87.2
77.5
90.7
76.8
91.1
87.3
83.3
95.8
70.2
93.5
82.7
59.7
75.8
82.8
SGPN
85.8
80.4
78.6
78.8
71.5
88.6
78.0
90.9
83.0
78.8
95.8
77.8
93.8
87.4
60.1
92.3
89.4
O-CNN+CRF
85.9
85.5
87.1
84.7
77.0
91.1
85.1
91.9
87.4
83.3
95.4
56.9
96.2
81.6
83.5
74.1
84.4
PointCNN
86.1
84.1
86.5
86.0
80.8
90.6
79.7
92.3
88.4
85.3
96.1
77.2
95.3
84.2
64.2
80.0
83.0
Ours
82.2
77.7
84.4
84.2
76.6
88.7
76.0
88.1
82.3
81.4
94.6
68.0
95.1
81.5
52.5
70.9
78.7
Method
ModelNet40
Classification
Accuracy
ModelNet10
Classification
Accuracy
PointNet
89.2
-
PointNet++
91.9
-
Kd-Net
91.8
94.0
O-CNN
90.6
-
SO-Net
93.4
95.7
SpiderCNN
92.4
-
PointCNN
84.5
91.0
RotationNet
97.3
98.5
3DShapeNets
77.0
83.5
binVoxNetPlus
85.5
92.3
VoxNet
83
92
ORION
-
93.8
Ours
88.8
93.0
On Improving 3D U-net Architecture
655

visualization (LTACH17013). The authors
acknowledge the support of the OP VVV MEYS
funded project CZ.02.1.01/0.0/0.0/16_019/0000765
„Research Center for Informatics“.
REFERENCES
Abadi, M. et al., 2015. TensorFlow: Large-Scale Machine
Learning on Heterogeneous Systems.
Çiçek, Ö. et al., 2016. 3D U-Net: learning dense volumetric
segmentation from sparse annotation. In Medical Image
Computing and Computer-Assisted Intervention –
MICCAI 2016., pp.424-432.
Goodfellow, IJ. et al., 2013. Maxout Networks. In
Proceedings of The 30th International Conference on
Machine Learning.
Hofmann, D. and Kowshik, B., 2018. Meet RoboSat - End-
to-end feature extraction from aerial and satellite
imagery. [online] Available at:
https://blog.mapbox.com/meet-robosat-af42530f163f
[Accessed 25 Feb. 2019].
Ioffe, S. and Szegedy, C., 2015. Batch Normalization:
Accelerating Deep Network Training by Reducing
Internal Covariate Shift. International Conference on
Machine Learning., pp.448-456.
Kanezaki, A., Matsushita, Y. and Nishida, Y., 2018.
RotationNet: Joint Object Categorization and Pose
Estimation Using Multiviews from Unsupervised
Viewpoints. In 2018 IEEE/CVF Conference on
Computer Vision and Pattern Recognition., pp.5010-
5019.
Kingma, D. P. and Ba, J., 2014. Adam: A method for
stochastic optimization. arXiv preprint
arXiv:1412.6980.
Klokov, R. and Lempitsky, VS., 2017. Escape from Cells:
Deep Kd-Networks for the Recognition of 3D Point
Cloud Models. In 2017 IEEE International Conference
on Computer Vision (ICCV)., pp.863-872.
Li, Y. et al., 2018. PointCNN: Convolution On X-
Transformed Points. In Advances in Neural Information
Processing Systems., pp.828-838.
Li, J., Chen, BM. and Lee, GH., 2018. SO-Net: Self-
Organizing Network for Point Cloud Analysis. In 2018
IEEE/CVF Conference on Computer Vision and
Pattern Recognition., pp.9397-9406.
Maturana, D. and Scherer, S., 2015. VoxNet: A 3D
Convolutional Neural Network for real-time object
recognition. In 2015 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS).,
pp.922-928.
Milletari, F., Navab, N. and Ahmadi, SA., 2016. V-Net:
Fully Convolutional Neural Networks for Volumetric
Medical Image Segmentation. In 2016 Fourth
International Conference on 3D Vision (3DV)., pp.565-
571.
Nair, V. and Hinton, GE., 2010. Rectified Linear Units
Improve Restricted Boltzmann Machines. In
Proceedings of the 27th International Conference on
Machine Learning., pp.807-814.
Qi, C. R. et al., 2017. PointNet: Deep Learning on Point
Sets for 3D Classification and Segmentation. In 2017
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR)., pp.77-85.
Qi, C. R. et al., 2016. Volumetric and Multi-view CNNs for
Object Classification on 3D Data. In 2016 IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR)., pp.5648-5656.
Qi, C. R. et al., 2017. Pointnet++: Deep hierarchical feature
learning on point sets in a metric space. In Advances in
Neural Information Processing Systems., pp.5099-
5108.
Riegler, G., Ulusoy, AO. and Geiger, A., 2017. OctNet:
Learning Deep 3D Representations at High
Resolutions. In 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR)., pp.6620-
6629.
Rusu, RB. and Cousins, S., 2011. 3D is here: Point Cloud
Library (PCL). In 2011 IEEE International Conference
on Robotics and Automation., pp.1-4.
Sabour, S., Frosst, N. and Hinton, GE., 2017. Dynamic
Routing Between Capsules. Neural Information
Processing Systems., pp.3856-3866.
Srivastava, N. et al., 2014. Dropout: a simple way to prevent
neural networks from overfitting. Journal of Machine
Learning Research. 15(1), pp.1929-1958.
Su, H. et al., 2015. Multi-view convolutional neural
networks for 3d shape recognition. In Proc. ICCV.
Wang, PS. et al., 2017. O-cnn: Octree-based convolutional
neural networks for 3d shape analysis. ACM
Transactions on Graphics (TOG). 36, p.72.
Wang, W. et al., 2018. SGPN: Similarity Group Proposal
Network for 3D Point Cloud Instance Segmentation. In
2018 IEEE/CVF Conference on Computer Vision and
Pattern Recognition., pp.2569-2578.
Wu, Z. et al., 2015. 3D ShapeNets: A deep representation
for volumetric shapes. In 2015 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).,
pp.1912-1920.
Xu, Y. et al., 2018. SpiderCNN: Deep Learning on Point
Sets with Parameterized Convolutional Filters.
european conference on computer vision., pp.90-105.
Yi, L. et al., 2016. A Scalable Active Framework for Region
Annotation in 3D Shape Collections. SIGGRAPH Asia.
Zhao, H. et al., 2018. A novel softplus linear unit for deep
convolutional neural networks. Applied Intelligence.
48(7), pp.1707-1720.
ICSOFT 2019 - 14th International Conference on Software Technologies
656
