
Integration of an Autonomous System with Human-in-the-Loop for
Grasping an Unreachable Object in the Domestic Environment
Jaeseok Kim, Raffaele Limosani and Filippo Cavallo
The Biorobotics Institute, Sant’Anna School of Advanced Studies, Viale Rinaldo Piaggio, Pontedera, Pisa, Italy
Keywords:
Mobile Manipulation, Autonomous System with Human-in-the-Loop, Assistive Robotics, Grasping an
Unreachable Object, Service Robotics.
Abstract:
In recent years, autonomous robots have proven capable of solving tasks in complex environments. In partic-
ular, robot manipulations in activities of daily living (ADL) for service robots have been widely developed.
However, manipulations of grasping an unreachable object in domestic environments still present difficulty.
To perform those applications better, we developed an autonomous system with human-in-the-loop that com-
bined the cognitive skills of a human operator with autonomous robot behaviors. In this work, we present
techniques for integration the system for assistive mobile manipulation and new strategies to support users
in the domestic environment. We demonstrate that the robot can grasp multiple objects with random size
at known and unknown table heights. Specifically, we developed three strategies for manipulation. We also
demonstrated these strategies using two intuitive interfaces, a visual interface in rviz and a voice user interface
with speech recognition. Moreover, the robot can select strategies automatically in random scenarios, which
make the robot intelligent and able to make decisions independently in the environment. We demonstrated
that our robot shows the capabilities for employment in domestic environments to perform actual tasks.
1 INTRODUCTION
In the home environment, perception is used to rec-
ognize a variety of objects; however, a service robot
might not be able to detect all of the objects in ev-
ery circumstance. In other words, when the robot at-
tempts to recognize multiple objects on a table, it is
difficult to detect all objects because many variables
such as the shape of object, robot hand position and
etc. should be considered. However, if a human can
support the judgment of the robot, the robot can ac-
quire the specific object needed quite easily.
To find solutions for performing tasks in the home
environment, many types of service robots have been
developed. In particular, robots that provide fully au-
tonomous system and activities of daily living (ADL)
for older people have been developed. One represen-
tative service robot is Care-O-bot, which was devel-
oped with basic technologies for delivery, navigation,
and monitoring for users (Schraft et al., 1998). More-
over, in recent years, several projects have featured
different robots that integrate smart home technol-
ogy for healthcare, shopping, garaging (Cavallo et al.,
2014), and communication with users by gesture and
speech (Torta et al., 2012).
Despite enhanced functionalities of the service
robots, we still face several challenges of ADL in the
domestic environment. Particularly with tasks such
as grasping objects iteratively in the environments,
the capabilities of current robots are still lacking. To
solve these problems, robots typically focus on either
a fully autonomous or a fully teleoperated system.
However, many limitations with perception and ma-
nipulation remain. A possible solution to overcome
these issues is to use autonomous system with human-
in-the-loop, in which the human operator controls the
robot in a remote site with a high level of abstraction.
In this paper, The development of the integra-
tion of an autonomous system with human-in-the-
loop was presented for grasping an unreachable object
in the domestic environment. The main contributions
of this paper are the following:
• Multi-object segmentation was implemented and
it supports grasping point detection that used
grasping the object with two different grasp poses
using a depth camera.
• Three mobile manipulation strategies were devel-
oped for picking and placing unreachable objects
with various and unknown table heights.
306
Kim, J., Limosani, R. and Cavallo, F.
Integration of an Autonomous System with Human-in-the-Loop for Grasping an Unreachable Object in the Domestic Environment.
DOI: 10.5220/0007839503060315
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 306-315
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: The mobile manipulation task is operated by human capabilities applied with Sheridan’s four-stage model (a)
Information acquisition, (b) Information analysis, (c) Detection and action selection, and (d) action implementation.
• Perception, visual and voice interfaces, and mo-
tion planning were integrated as functionalities
of grasping an unreachable object system frame-
work.
2 RELATED WORK
Mobile manipulation tasks for grasping an object in
the domestic environment have been studied exten-
sively over decades (Dogar and Srinivasa, 2011; Ki-
taev et al., 2015; Stilman et al., 2007; Ozg
¨
ur and
Akın, ; Fromm and Birk, 2016).
Grasping objects are frequently used for au-
tonomous manipulation system in the domestic en-
vironment. However, grasping unreachable objects
(occluded objects) are still one of the issues in the
environment. In order to solve the issue, the push-
ing manipulation systems for grasping unreachable an
object have been developed. Dogar et al. (Dogar and
Srinivasa, 2011) suggest a framework to generate a
sequence of pushing actions to manipulate a target
object. However, the pushing action system needs
adequate space in which to shift or remove objects.
To solve the problem, a sequence of manipulation ac-
tions to grasp the objects is suggested. Stilman et al.
(Stilman et al., 2007) use a sampling-based planner to
take away the blocking objects in a simulation. More-
over, Fromm et al. (Fromm and Birk, 2016) propose a
method to plan strategies for a sequence of manipula-
tion actions. Based on the previous paper, a sequence
of manipulation actions for grasping unreachable ob-
jects was considered. However, the discussed liter-
atures show that the robot already knows the target
object before the robot manipulation starts. To over-
come the object selection during the robot manipula-
tion, user-interfaces operated by autonomous system
with human-in-the-loop are developed.
Many prior works address that user-interfaces are
developed for object selection in an autonomous sys-
tem with human-in-the-loop. For remote selection of
an object by people at home, the graphical point-click
interface system was developed (Pitzer et al., 2011).
The interface is allowed to drag, translate, and rotate
to select a target object by a person. In addition, an in-
terface is used to generate waypoints for desired grip-
per position to conduct grasping tasks (Leeper et al.,
2012). The interface systems support the object selec-
tion problem using human capabilities. However, the
interface systems on the papers only consider grasp-
ing reachable objects, which are not occluded, and
simple task planning is applied. In addition, to select
the target object, a human operator should concentrate
on the visual display and take their time when select-
ing an object. For theses reasons, we developed three
mobile manipulation strategies for grasping occluded
and different grasp poses to support grasp planning
with intuitively user interfaces for object selection.
3 SYSTEM ARCHITECTURE
The goal of our work is to develop a robotic system
that will be able to help people in ADL. In particular,
we studied the scenario in which a user needs a par-
ticular object located on a table and asks the assistant
robot to find and bring the object.
In fact, the preferred way to achieve the scenario is
to operate the robotic system automatically. However,
the capability to recognize a target object, calculate
eligible grasp poses, and generate task planning for
complex tasks are still being researched. The mobile
manipulation task, which is part of the robotic sys-
tem, should be automated. Parasuraman et al. (Para-
suraman et al., 2000) proposed a model for different
levels of automation that provides a framework made
Integration of an Autonomous System with Human-in-the-Loop for Grasping an Unreachable Object in the Domestic Environment
307

Figure 2: A simple pictorial diagram with variables such
as neck angle(N
θ
), table height(T
h
) and object height(O
h
).
Look at the text for the variables applied in the equations.
up of four classes: (1) information acquisition, (2) in-
formation analysis, (3) decision and action selection,
and (4) action implementation. In current work, we
adapted the same framework in our robotic system
(see Figure 1).
4 AUTONOMOUS SYSTEM WITH
HUMAN-IN-THE-LOOP
DESCRIPTION
Based on Sheridan’s four-stage model, which was
previously described, Decision & Action selection
were conducted as a good starting point for the au-
tonomous system with human-in-the-loop concept.
We aimed to develop a system that is operated by min-
imum human effort. The human operator contributes
by interpreting the environment from the camera im-
ages and by choosing a low level of automation in the
third stage of Sheridan’s model.
The final objective of the mobile manipulation
task is to pick up an object on a table of unknown
height and bring it to a user. In our system, as the
robot finds a table, it measures the table height and ad-
justs its neck angle accordingly. Then, robot detects
and segments multiple objects that are positioned in
two rows (front and back). As the robot completes
extraction of the objects with several RGB colors, the
user selects a row and a target object using voice and
visual interfaces. Based on the table height informa-
tion, and row and object information (height, length,
weight, and distance), the robot selects one of three
mobile manipulation strategies that we have devel-
oped for grasping an object in the back row. The
strategies were designed with different grasp poses
according to the table heights.
For grasping an object, we followed two scenar-
ios, In the first scenario, the user employed a known
table height fixed at 70, 80, 90, or 100 cm. Moreover,
in the second scenario, the user employed an un-
known table height which is measured by robot itself,
and robot can decide empirically which strategies are
better for grasping. From several experimental trials,
empirical results suggest three strategy modes for
better grasping:
1 T
h
< 77cm
2 T
h
< 87cm
3 T
h
< 100cm
(1)
where T
h
is table height measured by camera. For
grasping objects and controlling the arm, we used
Point Cloud Library (PCL) (Rusu and Cousins, 2011)
and Moveit (Chitta et al., 2012) library.
5 IMPLEMENTATION OF
AUTONOMOUS SYSTEM WITH
HUMAN-IN-THE-LOOP
SYSTEM
The goal of the autonomous system with human-
in-the-loop is to provide support to improve the
quality of human life. Thus, we considered grasping
an object from a table of unknown height in the
domestic environment, which schematically is shown
in Figure 2 with our robot. Actually, many studies for
grasping objects (Dogar and Srinivasa, 2011; Kitaev
et al., 2015; Fromm and Birk, 2016) were tested
using fixed table height and viewpoint. However,
if the viewpoint is changed, detection of objects on
the table will be difficult by the robot. Therefore, to
overcome the difficulty of detecting objects from a
different viewpoint, we adjusted the neck angle of the
robot based on table height. Before applying the fixed
neck angle, the robot needs to find a table. Thus,
the initial neck angle was set at the lowest position
to find a lower table height. After the table was
segmented by PCL, a point (which is calculated by
averaging all the coordinate points on the top surface
of the table) was substracted from the base frame of
the robot (see Figure 4), and only the z-axis value
was used to calculate table height. Then the value
was stored for changing the neck angle and choosing
the strategies. Next, the neck angle of the robot was
adjusted by the interpolation method. To interpolate
the neck angle, we set the maximum and minimum
range of neck angle and table height. Moreover, the
linearly interpolated neck angle helped the robot to
detect multiple objects easily.
N
θ,d
= N
θ,min
+ (T
h
− T
h,min
)
N
θ,max
− N
θ,min
T
h,max
− T
h,min
(2)
where N
θ,d
is the desired neck angle, N
θ,max
and N
θ,min
are maximum and minimum neck angle, respectively,
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
308
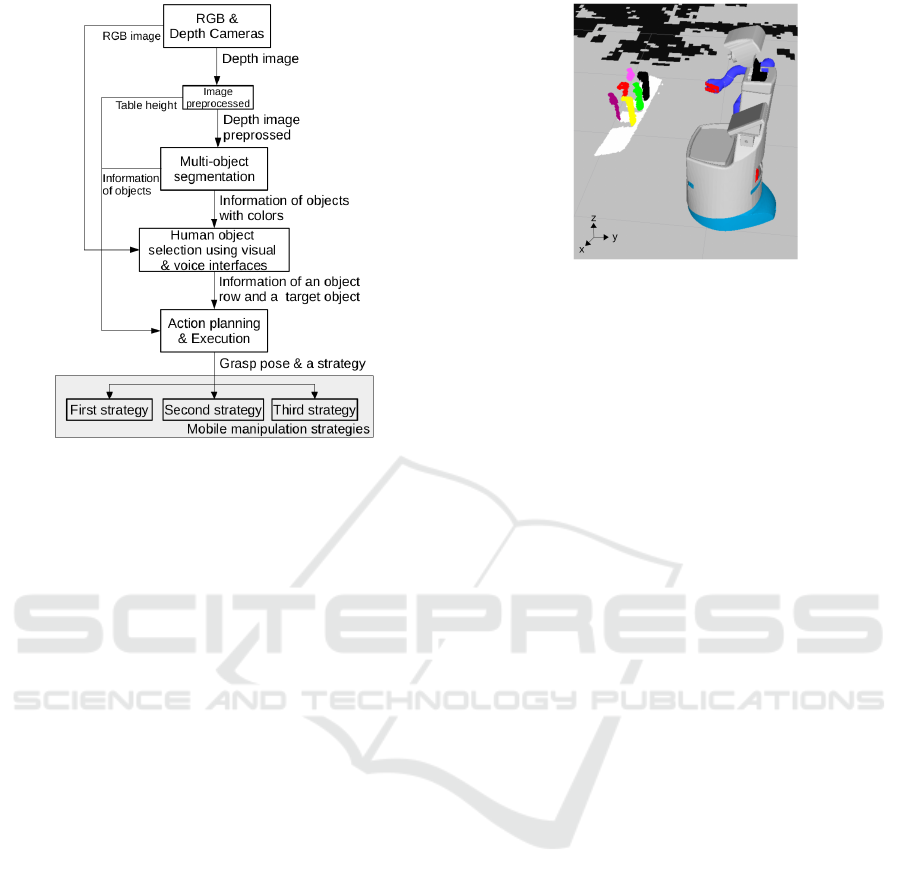
Figure 3: The flow chart of the autonomous system with
human-in-the-loop; It is included with image preprocess-
ing, multi-object segmentation, object selection and action
planning with developed strategies.
and T
h,max
and T
h,min
are maximum and minimum ta-
ble heights, respectively. The T
h
is the current table
height described in Figure 2. To establish an appro-
priate area for grasping an object, the robot secures
the workspace using a laser sensor to measure the
distance between the table and robot base. After the
robot judges that the workspace is appropriate for the
manipulation, it starts performing task given. This
process is represented in the flow chart in Figure 3.
5.1 Multi-object Segmentation
In our work, we adapted and modified the approach of
Trevoret al. (Trevor et al., 2013) to segment multiple
objects by an organized point cloud library. We used
a depth camera (Xtion) for acquiring depth data in-
stead of an RGB camera to increase depth data accu-
racy. For each point P(x,y), a label L(x, y) is assigned.
Points belonging to the same segment will be as-
signed to the same label based on the Euclidean clus-
tering comparison function (see (Trevor et al., 2013)
for more details). To segment the objects accurately,
some of the large segments, like the plane surface,
will be excluded. In addition, if the distance between
the two points in the same label set is more than a
threshold, one of the points will be discarded because
of increasing object segmentation speed. The area
to be clustered and the threshold of points for each
object. The points of each object clustered between
1500 to 10000 points were chosen experimentally. To
Figure 4: Real-time multi-object segmentation on the table
visualized in rviz (Hershberger et al., 2011)
distinguish between multiple objects easily, the object
were covered with six RGB colors. The result of this
segmentation process is presented in Figure 4. This
process is described in the flow chart shown in Figure
3).
5.2 Human Object Selection
For our robotic platform, object selection was done
in two ways: 1) voice and 2) visual. We also believe
that a combination of these two methods could be eas-
ily accessible for very old people who cannot move.
Moreover, our interface platform includes a tablet for
the voice user interface (see Figure 5(b)) and rviz in
a PC for the visualization interface (see Figure 5(a)).
The visualization interface, which includes RGB col-
ors and depth information of the environment, was
provided for the selection system; the voice user inter-
face is based on speech recognition (Sak et al., 2015).
The selection system consisted of three steps:
• 1. Select one of the rows of multiple objects
• 2. Choose an object desired in the same row
• 3. Choose an object desired in a different row
First, the user selects the object from the front or
back row of the table. After identification of the row
(front or back), the target object selection is done (see
Figure 3).
5.3 Action Planning & Execution
Among multiple objects, grasping an object is still a
challenge. Thus, we tried to find a grasping point with
simply shaped objects such as a bottle or box, which
are common household objects in the domestic envi-
ronment. In addition, the grasping point was used to
generate possible hand poses relative to the object for
action planning.
To extract the grasping point from each object, we
used the 3D centroid function in PCL and configured
Integration of an Autonomous System with Human-in-the-Loop for Grasping an Unreachable Object in the Domestic Environment
309

Figure 5: (a) Visualization interface system, (b) Voice user
interface system.
Figure 6: (a) Top grasp pose, (b) Side grasp pose.
the grasp poses. In our case, we characterized two
types of grasp poses:
•Top pose: It is aligned by the robot hand to the
object in the vertical plane (along the x- and z-axis),
and opening and closing of the robotic hand is in the
direction of the x- or y-axis (see Figure 6(a)).
•Side pose: It is defined in the horizontal plane
(along the x- and y-axis), and the opening and closing
direction of the robotic hand is the same as previous
(see Figure 6(b)).
To grasp the object, we used the motion plan-
ning library, which includes capability for collision
avoidance, self-collisions, and joint limit avoidance
of the robot arm in the domestic environment. The
motion planning library (Moveit) was used for exe-
cuting three mobile manipulation strategies. During
the motion planning, the position of the robot hand
plays an important role in grasping. For this reason,
pre-grasp position (it is an offset from the target ob-
ject with the two grasp poses) was developed. Af-
ter the pre-grasp position was obtained, the palm of
the robot hand approached the surface of the target
object to grasp it. Based on these technologies, the
strategies were enhanced to avoid crashes between the
robot arm and robot body during the operation (Cio-
carlie et al., 2014) (see Figure 3).
5.4 Developed Mobile Manipulation
Strategies
Three strategies of the mobile manipulation were con-
ceived to grasp an object, which was apart from the
robot. A set of 6 objects, arranged in two rows, was
placed in front of the robot (see Figure 5(a)). We con-
Figure 7: The first strategy for manipulation: (a) The robot
moves close to the table, (b) The mobile platform is rotated
to grasp the target object. (c) Top grasp pose is implemented
to grasp the object directly. (d) After grasping the object,
the robot arm returns back to the initial position.
sider grasping objects placed in the back row because
grasping front row objects are an easy task that we
have already developed. Before starting the strategies
for grasping an object, we need to accomplish three
steps. The first step is initialization of the robot arm.
The next step is to transform the coordinates of mul-
tiple objects from camera frame to robot base frame
for manipulation. The last step is pre-grasp position
based on table height. These three steps are described
in Algorithm 1 (lines 2 to 5). Actually, these steps are
capable of grasping an object on a table, but grasping
back-row objects always fails due to the obstruction
caused the front-row objects. For these reasons, we
developed three strategies for the mobile manipula-
tion for grasping an object in the back row.
• The First Strategy.
The objective of the first strategy was to grasp an
object on the approximately 70cm high table, directly
from the back row, to reduce manipulation time. The
mobile platform was pre-defined to be at a rotated an-
gle and also the specific neck angle that supports seg-
mentation of objects in the back row was set. Ac-
tually, when the same sizes of objects are detected,
the visualization of the object size shows differently
because the distance from the camera to each object
is different. In addition, the objects in the front row
would be obstructed during grasping, and it will be
difficult to detect the entire size of the back row ob-
jects. For this reason, the function of the linear inter-
polation (the same as Equation 2) with different vari-
ables was developed. The output of the interpolation
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
310

Figure 8: The second strategy shows the robot performing
lateral grasp to pick up an object in the back. (a) First, the
object in front of the object selected is removed. (b) The
object is placed on the empty place. (c) The robot grasps
the target object with a side grasp pose. (d) As the object
grasps, the arm starts to return back to the initial position.
is a value that will add to the position in the z-axis
to establish the stable grasping point. After the inter-
polation, the top grasp pose was applied to grasp the
object directly. The first strategy in the actual envi-
ronment was performed as shown in Figure 7((a)-(d))
and also as described in Algorithm 1 (lines 22 to 25).
• The Second Strategy.
The first strategy of the mobile manipulation was
useful to grasp the objects in the back. However, we
still are challenged to ensure stable grasping by the
robot. For this reason, we developed a new strategy to
grasp the objects in the back row to compensate for an
inadequate object segmentation and robust and stable
grasping. The objective of the second strategy was
to grasp the objects from an 80cm high table while
ensuring good stability. To pick up the objects, the
algorithm for removing the objects in the front was
conceived. The point of the strategy is that when the
user selects the back row and target object, the robot
calculates the centroid of the front row object as well.
Then, the robot lifts the object off the front row and
places it in the empty place on the table. First, to find
the objects in the front, the function was implemented
for searching the nearest distance between all objects
and the target object. After the object in the front
row was found, the pre-defined grasp position was
applied. To ensure a stable grasping, the side grasp
pose was introduced. Then, as the front row object
was grasped (see Figure 8(a)), a pre-defined place
was located at the right edge of the table (see Figure
Algorithm 1: The three mobile manipulation strate-
gies.
Input : Joint position q, Inital pose x
init
, Object
row O
row
, All objects information O
all
,
The centroid of the object selected and
transformed O
cen
, Object desired x
d
,
Grasp pose x
grasp
, The new centroid of
the object selected and transformed
O
newcen
, Distance of z axis z
add
, Table
height T
h
Output: Goal pose, x
goal
1 while until manipulator finish task given do
2 InitializationJacoArm(q);
3 TransformAllObjects;
4 x
grasp
← Pre-definedGraspPose(x
init
, O
row
,
T
h
);
5 if O
row
.back = True then
6 if T
h
<= 100 then
7 • The Third Strategy Starts
8 Update ObjectStates &
MoveMobileBase;
9 O
newcen
← Search
ObjectUsingAxis(O
cen
);
10 x
d
←
CalculateTargetObject(O
newcen
);
11 ManipulationBasedOnModeSelection;
12 x
goal
← x
d
· x
grasp
;
13 end
14 if T
h
<= 87 then
15 • The Second Strategy Starts
16 Search NearestObject(O
cen
);
17 Search Pre-defiendEmptySpace(O
all
);
18 x
d
← Calculate TargetObject(O
cen
);
19 x
goal
← x
d
· x
grasp
;
20 end
21 if T
h
<= 77 then
22 • The First Strategy Starts
23 Rotate MobileBase & Set the Angle
of Neck
24 z
add
←
InterpolationAddGraspAxis(O
cen
);
25 x
goal
← x
cen
· x
grasp
· z
add
;
26 end
27 end
28 end
8(b)). Since the robot arm is mounted on the right of
the body, we considered that an available place to the
right would be easier. After the object was placed on
the table, the arm returned to the initial position and
the robot started grasping the target object with the
side grasp pose (see Figure 8(c,d)). The entire process
is represented in Algorithm 1 (lines 15 to 19).
• The Third Strategy.
The first and second strategies of the mobile manipu-
lation were helpful to grasp objects in the back row,
but the robot might fail to accomplish the task. For
example, if the robot faced a table higher than its vi-
Integration of an Autonomous System with Human-in-the-Loop for Grasping an Unreachable Object in the Domestic Environment
311

Figure 9: Experimental setup with multiple objects and an
adjustable height table.
sual field, or if objects in the front row were taller
than objects in the back row, the robot could not de-
tect objects in the back row. For this reason, the third
strategy was developed to grasp the hidden object.
The third strategy is used in the particular situation of
a hidden object when the first and second strategies
cannot perform grasping tasks. In this strategy, hu-
man support was exploited to overcome the difficulty
of object selection. To conduct a feasibility study for
the third strategy, the hidden object was evaluated ac-
cording to the decision of the user. The object selec-
tion method in the third strategy was not the same as
in previous strategies because the user cannot see the
object in the back using visual interface. However, the
user already knows the location of the target object
on the table and selects the back row and an object in
the front using voice interface. After the user selects
both row and object, the process of the third strategy,
which is similar to that of the second strategy, is im-
plemented. The basic difference between these two
strategies is to update the state of the objects. After
the object in the front is placed in the empty space,
the robot should discover the target object. To find
the object, the state of the scene was updated using
the multi-object segmentation function. In addition,
the information of the y-axis is used to find the target
object because the target object is located colinear to
the front object. The simplified algorithm is described
in Algorithm 1(lines 7 to 11).
Figure 10: Objects were placed as follows: (a) left top:
short objects, right: tall objects; (b) short objects in the front
(FSO, right top); (c) tall objects in the front (FTO, left bot-
tom); and (d) random size objects (RO, right bottom).
6 EXPERIMENTAL SETUP
Our experimental setup is shown in Figure 9. The
robotic platform for the experiment is the Doro (do-
mestic robot) personal robot (Cavallo et al., 2014), a
service robot equipped with an omni-directional mo-
bile base and a Kinova Jaco robotic arm. The Kinova
Jaco arm, which has six degrees of freedom, is used
for manipulation tasks. The head of the Doro is a pan-
tilt platform equipped with two stereo cameras and an
Asus Xtion Pro depth camera; they are used for ob-
ject detection and segmentation. To implement ADL,
we set up the experimental environment with multi-
ple objects placed on the table, which can be adjusted
in height as shown in Figure 9. Three objects were
placed in the front, and the others were placed in the
back. We used rectangular objects such as plastic bot-
tles and juice boxes during the experiments.
For the experiment, several scenarios were orga-
nized. Before grasping an object in the back row,
we tested a simple scenario for grasping an object in
the front row. Then, the three manipulation strate-
gies were tested to grasp an object in the back. The
known table height was set at different steps of 10
cm, such as 70, 80, 90, and 100 cm. In addition,
these three strategies were tested at an unknown table
height to apply them in the real life situation. The ob-
jects were placed in three positions: short size objects
in the front (FSO), tall size objects in the front (FTO),
and random size objects (RO) (see Figure 10). Dur-
ing the manipulation with all strategies for unknown
table height, we considered grasping one of the ob-
jects, which were placed randomly. The scenarios
were evaluated 10 times for each strategy in terms of
collision and success rate with known table height and
with unknown table height.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
312

Figure 11: The success rate of the mobile manipulation for
grasping an object in the back row on known table heights:
(a) First strategy; (b) Second strategy; (c) Third strategy.
7 EXPERIMENTAL RESULTS
Firstly, quantitative analysis for three mobile manipu-
lation strategies for known and unknown table height
were performed.
7.1 Quantitative Analysis at Known
Table Heights
The quantitative results focused on three criteria: suc-
cess rates and collision The success rates were mea-
sured when the robot grasped a target object. We
also considered a collision case in which objects were
crashed into by a robot hand.
7.1.1 Success Rates
The success rates were evaluated in each strategy with
three different object positions (FSO, FTO, and RO)
on known table heights.
As shown in Figure 11(a), the success rate of the
first strategy was higher for the 70 cm table height
compared to any other table heights and strategies
(60% to 80% for all three scenarios). At this ta-
ble height, the second and third strategies have low
success rates of manipulation because of lack of
workspace. Nevertheless, some trials in the first strat-
egy also failed to grasp the target object, although
we developed linear interpolation to overcome insuf-
ficient object segmentation and stable grasping. In
addition, except for the 70 cm table height, the first
strategy was not successful in grasping because the
robot cannot reach pre-grasp position over 77 cm.
The success rate of the second strategy was im-
proved for a table height of greater than 80 cm, which
is better than for the first strategy, but it doesn’t work
for the 70 cm table height (see Figure 11(b)). In par-
ticular, we found that the second strategy was a suc-
cess for an average of 30% of the 70 cm table height
tests in three different scenarios. Moreover, this strat-
egy performed better for 80, 90, and 100 cm table
heights for FSO and RO (success rate varies from
60% to 80%). We also observed that the second strat-
egy failed to grasp FTO objects at table heights of
90 and 100 cm, which occurred due to taller objects
blocking the target object (the human could not see
or select the target object). In addition, when the
robot grasped an object in the FTO, the robot only
segmented small parts of objects in the back at 80 cm
table height. Therefore, the grasp point was not ex-
tracted accurately.
Finally, the third strategy (see Figure 11(c)) could
be carried out with any table height. In this case,
the success rate varies from 70% to 80% (higher than
second strategy) at 80, 90, and 100 cm table heights.
However, for the 70 cm table height, the performance
is similar to that of the second strategy (20% to 30%).
As the robot removed the front object, the multi-
object segmentation system was repeated automati-
cally. As a result, the grasp point could be extracted
more accurately than with the second strategy. Fail-
ure of the strategy occurred when the grasp force was
insufficient to grasp the target object. Thus, the robot
dropped the object during manipulation. As shown in
Figure 11(c), the third strategy can be applied in any
environment and shows better performance except for
the 70 cm table height.
7.1.2 Collisions
During the evaluation, the number of collisions was
measured for each table height using the three strate-
gies for a total of 10 times for all scenarios in the ex-
periments (see Figure 12).
The best results with 70 cm table height were
achieved using the first strategy with a total average of
seven collisions from all scenarios (see Figure 12(a)).
The collisions in the strategy occurred while the robot
arm returned to the home position. Except for the
70 cm table height, the low number of collisions oc-
Integration of an Autonomous System with Human-in-the-Loop for Grasping an Unreachable Object in the Domestic Environment
313
(a)
(b)
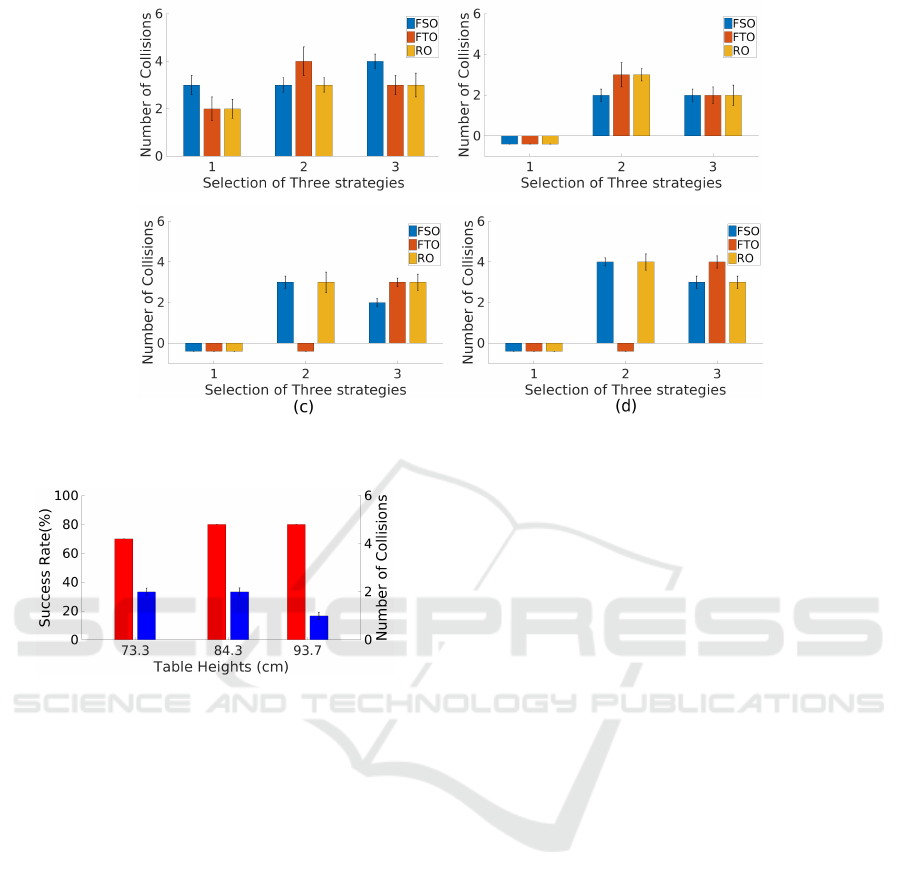
Figure 12: Number of collisions with three strategies during the grasp of an object in the back row for known table heights:
(a) 70 cm table height; (b) 80 cm table height; (c) 90 cm table height; (d) 100 cm table height.
Figure 13: The success rate and number of collisions with
three strategies of the mobile manipulation for grasping an
object in the back row with unknown table heights.
curred at 80, 90, and 100 cm table height with the
third strategy. The total number of collisions using the
strategy occurred with all scenarios, with averages of
six, eight, and ten for 80, 90, and 100 cm table height
respectively (see Figure 12(b),(c),(d)), and standard
deviation is about 5% of each collision. However,
the second and third strategies have similar manipu-
lations. Therefore, Figure 12(b),(c),(d) show that the
collisions of the strategies are similar except for 90
cm and 100 cm table heights in the FTO scenario. The
collisions with two strategies occurred while the robot
arm was close to the object and returned to the home
position with a target object.
Actually, with the first strategy, collisions only
with the 70 cm table height could be measured be-
cause the robot arm could not reach objects with the
other table heights (see Figure 12(a)). Moreover, we
could not measure collisions with the second strategy
in the FTO at the 90 and 100 cm table heights since
the objects in the back were occluded due to being
shorter than the front objects (see Figure 12(c),(d)).
7.2 Quantitative Results in Unknown
Table Heights
Previous quantitative results were analyzed using
known table height. However, various types of tables
exist in reality. Before we set up the table height, we
defined range between 70 and 100 cm to select strate-
gies automatically. Then, the table height was set
up randomly between defined ranges. Also, we only
tested the strategies with objects in the RO configura-
tion for implementing in the actual environment.
To confirm the three strategies of mobile manipu-
lation, the three different table heights were measured
and the results were evaluated in the same manner as
previous cases (see Figure 13). The robot selected
one strategy automatically to manipulate according to
table height. As a result, the experiment was tested
in ten trials; the average of the success rate of the
manipulation in unknown table height is greater than
75%. We analyzed the number of collisions during
the experiment. Collisions were evaluated with the
same criteria, and an average of five collisions oc-
curred with all three scenarios.
8 CONCLUSIONS AND FUTURE
WORK
In this paper, we present three mobile manipulation
strategies in which the operator provides a simple
command using visual and voice user interfaces. The
three strategies of the mobile manipulation were de-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
314

veloped to pick and place, and convey an object in the
domestic environment effectively. Based on the re-
sults, the three strategies have their own advantages at
the different table heights. Therefore, the intelligent
strategy selection system can be applied for domestic
environments that have different table heights.
Actually, the current system could be used to de-
tect, cluster, and extract simple household objects
such as bottles, boxes, etc. However, various objects
that are different in shape exist in the domestic en-
vironment. Therefore, the 3D centroid of an object
would not be able to grasp it. For this reason, we will
develop a grasp pose algorithm for a variety of house-
hold objects with our strategies to save time (Redmon
and Angelova, 2015). In addition, a deep learning-
based approach for extracting grasping point could
be considered to obtain more accurate performance
(Lenz et al., 2015; Levine et al., 2016).
ACKNOWLEDGEMENT
The work described was supported by the Robot-
Era and ACCRA project, respectively founded by
the European Community’s Seventh Framework Pro-
gramme FP7-ICT-2011 under grant agreement No.
288899 and the Horizon 2020 Programme H2020-
SCI-PM14-2016 under grant agreement No. 738251.
REFERENCES
Cavallo, F., Limosani, R., Manzi, A., Bonaccorsi, M., Es-
posito, R., Di Rocco, M., Pecora, F., Teti, G., Saffiotti,
A., and Dario, P. (2014). Development of a socially
believable multi-robot solution from town to home.
Cognitive Computation, 6(4):954–967.
Chitta, S., Sucan, I., and Cousins, S. (2012). Moveit![ros
topics]. IEEE Robotics & Automation Magazine,
19(1):18–19.
Ciocarlie, M., Hsiao, K., Jones, E. G., Chitta, S., Rusu,
R. B., and S¸ucan, I. A. (2014). Towards reliable grasp-
ing and manipulation in household environments. In
Experimental Robotics, pages 241–252. Springer.
Dogar, M. and Srinivasa, S. (2011). A framework for push-
grasping in clutter. Robotics: Science and systems VII,
1.
Fromm, T. and Birk, A. (2016). Physics-based damage-
aware manipulation strategy planning using scene dy-
namics anticipation. In Intelligent Robots and Systems
(IROS), 2016 IEEE/RSJ International Conference on,
pages 915–922. IEEE.
Hershberger, D., Gossow, D., and Faust, J. (2011). Rviz.
Kitaev, N., Mordatch, I., Patil, S., and Abbeel, P. (2015).
Physics-based trajectory optimization for grasping in
cluttered environments. In Robotics and Automa-
tion (ICRA), 2015 IEEE International Conference on,
pages 3102–3109. IEEE.
Leeper, A. E., Hsiao, K., Ciocarlie, M., Takayama, L., and
Gossow, D. (2012). Strategies for human-in-the-loop
robotic grasping. In Proceedings of the seventh an-
nual ACM/IEEE international conference on Human-
Robot Interaction, pages 1–8. ACM.
Lenz, I., Lee, H., and Saxena, A. (2015). Deep learning for
detecting robotic grasps. The International Journal of
Robotics Research, 34(4-5):705–724.
Levine, S., Finn, C., Darrell, T., and Abbeel, P. (2016). End-
to-end training of deep visuomotor policies. Journal
of Machine Learning Research, 17(39):1–40.
Ozg
¨
ur, A. and Akın, H. L. Planning for tabletop clutter
using affordable 5-dof manipulator.
Parasuraman, R., Sheridan, T. B., and Wickens, C. D.
(2000). A model for types and levels of human in-
teraction with automation. IEEE Transactions on sys-
tems, man, and cybernetics-Part A: Systems and Hu-
mans, 30(3):286–297.
Pitzer, B., Styer, M., Bersch, C., DuHadway, C., and
Becker, J. (2011). Towards perceptual shared auton-
omy for robotic mobile manipulation. In Robotics and
Automation (ICRA), 2011 IEEE International Confer-
ence on, pages 6245–6251. IEEE.
Redmon, J. and Angelova, A. (2015). Real-time grasp
detection using convolutional neural networks. In
Robotics and Automation (ICRA), 2015 IEEE Inter-
national Conference on, pages 1316–1322. IEEE.
Rusu, R. B. and Cousins, S. (2011). 3d is here: Point cloud
library (pcl). In Robotics and automation (ICRA),
2011 IEEE International Conference on, pages 1–4.
IEEE.
Sak, H., Senior, A., Rao, K., Beaufays, F., and Schalkwyk,
J. (2015). Google voice search: faster and more accu-
rate. Google Research blog.
Schraft, R., Schaeffer, C., and May, T. (1998). Care-o-
bot/sup tm: the concept of a system for assisting el-
derly or disabled persons in home environments. In
Industrial Electronics Society, 1998. IECON’98. Pro-
ceedings of the 24th Annual Conference of the IEEE,
volume 4, pages 2476–2481. IEEE.
Stilman, M., Schamburek, J.-U., Kuffner, J., and Asfour, T.
(2007). Manipulation planning among movable obsta-
cles. In Robotics and Automation, 2007 IEEE Inter-
national Conference on, pages 3327–3332. IEEE.
Torta, E., Oberzaucher, J., Werner, F., Cuijpers, R. H., and
Juola, J. F. (2012). Attitudes towards socially assis-
tive robots in intelligent homes: results from labora-
tory studies and field trials. Journal of Human-Robot
Interaction, 1(2):76–99.
Trevor, A. J., Gedikli, S., Rusu, R. B., and Christensen,
H. I. (2013). Efficient organized point cloud segmen-
tation with connected components. Semantic Percep-
tion Mapping and Exploration (SPME).
Integration of an Autonomous System with Human-in-the-Loop for Grasping an Unreachable Object in the Domestic Environment
315
