
A Review of Safety Methods for Human-robot
Collaboration and a Proposed Novel Approach
Ansuri Reddy, Glen Bright and Jared Padayachee
Discipline of Mechanical Engineering, University of KwaZulu Natal, King George V Ave, Durban, South Africa
Keywords: Obstacle Avoidance, Trajectory Planning, Sensory Systems, Environment Mapping, Serial Manipulators.
Abstract: Industrial robots offer the advantage of flexible manufacturing and increased efficiency when paired with
human workers. However, this means breaking well-established safety procedures such as safety fences and
workspace separation. Robots present a danger to humans as they work at high speeds with sudden motions.
It is therefore necessary to ensure safe interaction during collaboration. This paper presents a collection of
sources that explain the trends and advances in the field of industrial robotics specifically to safety in human-
robot interaction. Major trends and popular methods lean towards obstacle avoidance using a sensory planning
method of polynomials and a sensory system that is able to map the robot workspace. The goal of these
methods is to ensure that the human is kept safe. These methods were used to develop a novel approach to
safe interactions. This approach uses a LIDAR sensor for obstacle detection and tracking.
1 INTRODUCTION
Industry 4.0 has brought with it advances and
advantages to factories and their methods of
production specifically in flexible and reconfigurable
manufacturing (Shiyong Wang, 2016). Industrial
Robots perform a variety of repeatable tasks at
consistent quality resulting in decreased waste and
production costs (Fryman and Matthias, 2012).
Factories are able to increase their production rate and
throughput of components that meet all the quality
standards leaving the humans to perform more
complex tasks. However, the flexibility of robot
systems is limited by programming and part feeding
challenges. A human worker resolves this challenge
by monitoring or working collaboratively with the
robot. Humans perform maintenance tasks, check the
quality of parts and set up the workspace of the
robots. This close working relationship requires the
robot to be aware of the human in its workspace.
Industrial robots are made of steel, are extremely
heavy and move at high speeds with sudden
movements. Without safety fences, these
characteristics make it dangerous for a human to be
in close proximity to an industrial robot as it performs
its tasks (D. Gao, 2009). The human could easily be
injured or killed by being hit with the robot arm or
struck with the work tool. To ensure human safety,
research is being conducted to discover ways of
keeping humans safe within a robot production
environment.
This paper presents the various safety methods
used in industry as well as approaches developed by
researchers. These methods are in accordance with
ISO/TS 15066:2016 which are the methods of
collaborative robotics. The safety method themes
presented in this paper are robot vision, obstacle
detection, obstacle avoidance, and trajectory
planning.
A novel approach to safe Human Robot
Interaction is discussed. The objectives of this
research study were to research human-robot
interaction, develop a sensory system for human
detection, algorithms for data processing and
predicting the location of the human in the workspace
and to develop algorithms that allow the robot to
modify its work routine in a safe, reactive manner.
This paper contribution is a literature review of the
state of the art methods of safety for humans in
industrial robot production environments. The
objective of safe interaction is to eliminate the risk of
collisions between the human and the robot.
Reddy, A., Bright, G. and Padayachee, J.
A Review of Safety Methods for Human-robot Collaboration and a Proposed Novel Approach.
DOI: 10.5220/0007840502430248
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 243-248
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
243

2 COLLABORATIVE ROBOT
SAFETY METHODS
ISO/TS 15066:2016, the technical standard for
Human-Robot Interaction, states the basic safety
methods of collaborative robots for industrial
application. These methods are Hand Guiding, Speed
and Separation Monitoring, Power and Force
Limiting and Safety Rated Monitored Stop (Marvel,
2017). Hand Guiding allows the operator to transmit
motion commands by showing the robot physically
how to move when performing a task. The speed and
separation monitoring condition continually monitors
the proximity of the robot to the obstacle and
maintains a set distance away. This condition is the
most usable with regards to collision avoidance. The
safety monitored stop condition stops the robot before
the human enters the workspace. This can be
implemented as a trip switch when a human enters the
environment. Power and Force limiting is used to
ensure that the force felt by a human worker is very
small and does not injure the human in any way.
Industrial application collaborative robots have
been developed by companies such as Rethink
Robotics, Fanuc, Kuka, and ABB.
Rethink Robotics collaborative robot sawyer is a
high-performance single arm robot designed to work
on tasks that require high precision. Sawyer is a fully
integrated collaborative robot solution, embedded
with Cognex Vision System located in its arm. The
vision system combined with built-in force sensors
allow the robot to make adaptive decisions and work
precisely േ 1mm away from the human for safe
collaborative operation. Elastic actuators on each
joint minimise contact force(robotics, 2017). The
sawyer robot uses the Speed and Separation
monitoring and the Power and Force Limiting safety
method.
Fanuc’s collaborative model cr-35ia is aware of
its surroundings and stops safely when contact with a
human operator is detected. The Dual Check Safety
system can be set up to perform checks on Position,
Safe Zones, Speed and Cartesian Position. This
system decreases the amount of floor space needs for
safe operation and eliminates the need for
fences(Robotics, 2019). This robot also used the
Power and Force Limiting safety method of Human
Robot Collaboration.
Kuka LBR iiwa (intelligent industrial work
assistant) robot has been designed for close human
collaboration. This robot is light weight and able to
react quickly if human contact is detected by its joint
torque sensors(KUKA, 2014). Kuka LBR iiwa uses
the Power and Force Limiting technique.
ABB’s robot Roberta is a collaborative robot
designed to suit Small to medium size enterprises.
This agile, light weight robot features a camera vision
system that can detect the object in its gripper and is
able to decipher if it is a human hand or a tool. It is
also equipped with fingertip force sensors that slows
down or stops the robot when contact is detected with
a human(Robotiq, 2014). Roberta uses the Hand
Guiding and Power and Force Limiting techniques.
3 ROBOT VISION
To perform obstacle avoiding tasks the robot requires
complete awareness of its workspace and any
potential obstacles in the field. Robot awareness is
created by implementing a vision system that covers
the entire workspace. Vision systems such as stereo
cameras, RGB Vision systems, proximity sensors and
ultrasonic sensors provide decent awareness of the
robot workspace environment. The sensors detect the
presence of an obstacle in the environment. Obstacle
tracking data provides information about human
intention. This is achieved by tracking and
interpreting human motions and gestures (Billard and
Dillmann, 2006).
The workspace is created using grid
representation. The location of an obstacle within the
grid is communicated to the robot to facilitate
obstacle avoidance and trajectory planning.
Constructive solid geometry is primarily used to
model the robot workspace environment (Zacharias
et al., 2007).
Localisation and position are primarily based on
visual and positional data derived from the visual
sensors of the robot. There are two approaches that
exist: Continuous geometric mapping and Discrete
cell-based mapping. Continuous geometric mapping
represents the environment more accurately, while
Discrete cell-based mapping method represents the
environment in discrete cells that form a grid. Each
cell represents a square area of the environment and
stores a value that indicates the occupied state of that
area. (Marvel, 2017)
4 ROBOT CONTROL
Robot control is essential to ensure the robot performs
appropriate actions around humans in the workspace
and completes tasks while avoiding all collisions. It is
necessary for the robot to be programmable in order
to achieve a variety of tasks. Adaptability is also
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
244

necessary for the robot to modify its own behaviour,
meet its goal and have good reactivity to sudden
obstacles (Albu-Schäeffer et al., 2005).
4.1 Obstacle Detection
Obstacles within the workspace can be detected by
proximity or depth sensors. Ultrasonic sensors emit
an ultrasonic sound wave and receive the echo. The
time taken for the echo to return can be used to
calculate the distance of an obstacle away from the
sensor. Other sensors such as stereoscopic sensors use
3D imaging to create the illusion of depth offering the
advantage of depth perception of the environment
(Pérez et al., 2016). Infrared Sensors detect motion of
a human in the workspace and can only be used for
dynamic objects.
Capacitive sensors are used to detect the presence
of a human. These sensors are capacitors that detect
and track a human with good accuracy. The robot
manufactures at Fogale Robotics have used this
technology to create a skin that covers the robot to
detect a human at any point on its body. Scanning
range finders such as LIDAR or RADAR are capable
of detecting an obstacle as well as counting, locating
and tracking them. Cameras and imaging devises are
the most popular form of obstacle detection and
tracking in a robot workspace. They are also the most
affordable to implement. A depth camera captures the
depth of an object. A study by (Flacco et al., 2012)
has shown that a robot can avoid an obstacle easily
and consistently when using depth camera imaging.
4.2 Obstacle Avoidance
Obstacle avoidance algorithms instruct the robot to
avoid a collision with a human and the path planning
algorithm plans a new path to allow the manipulator
to contour around the human towards its goal
configuration. The kinematic calculations determine
the position and orientation of the new goal pose once
the path has been planned. Robot motion is restricted
due to singularities. The path planner considers the
singularities when planning the trajectory of the
robot.
Real-time collision avoidance methods allow for
safe human-robot interaction as the robot can adjust
itself as the human moves within the workspace. A
method described by (Fratu et al., 2010) continuously
measures the proximity between the robot and
dynamic obstacles and uses the data to generate
repulsive vectors. The vectors control the robot as it
manoeuvres and performs a task. An obstacle
avoidance algorithm by (Flacco et al., 2012) uses a
stereoscopic depth sensor to capture the environment.
The obstacle avoidance algorithm incorporates
different reactions that have been set up for the end
effector and other joints of the manipulator. This
allows the robot to react in a number of ways to avoid
an obstacle.
To avoid collisions with dynamic objects, free
space must be considered around these objects.
Collision avoidance is an important factor in Path
Planning. In a case where there is no automatic
collision avoidance, the robotic workspace must be
engineered to be collision-free another option is to
have sub-optimal paths which are selected by the
human programmer (Mohammed et al., 2017). The
feedback to the planner is used to pause paths where
collisions are imminent.
4.3 Trajectory Planning
Trajectory planning is fundamental to collision
avoidance techniques. To re-rout a robot and avoid an
obstacle the robot needs to search for a new path and
plan a trajectory that will allow it to contour around
the human and meet its goal without collision. The
term trajectory refers to a path that is executed in a
specific time interval. Trajectories can be planned
using a variety of equations to specify the shape of the
path. The most common being the polynomial
trajectory. Polynomial trajectories are commonly
formulated using a polynomial equation these
equations are iterative and plot a spline when the time
is specified. The coefficients calculated are the
velocity, acceleration and position values for the
trajectory (Letla, 2008 ). The degree of the
polynomial depends upon the complexity of the path.
A study by (Boryga et al., 2015) has used a
method called PR-RPT (Planning Rectilinear-Arc
Polynomial Trajectory) which is a method of
trajectory planning that links rectilinear lines that
intersect with a curve of a set radius. This method
uses a seven-degree polynomial so that the jerk is
equal to 0 when the robot transitions between speeds.
Seven types of path planners exist. These include
knowledge-based simple path planners, knowledge-
based hybrid path planners, sensor-based path
planners, static knowledge and sensor-based
hierarchical path planners, dynamic knowledge and
sensor-based path planners, path planners based on
offline programming, path planners based on online
programming.
A Review of Safety Methods for Human-robot Collaboration and a Proposed Novel Approach
245

4.4 Trajectory Planning Methods
There are three types of trajectory planning
algorithms: road map, cell decomposition and
potential field method. The road map method
represents the free configuration space and its
connectivity to other free paths. Cell decomposition
can be broken down into two aspects: exact cell
decomposition and approximated cell decomposition.
The Octree method is an approximated cell
decomposition method where the cells are
consecutively subdivided until there are no mixed
cells on the map (Sousa e Silva et al., 2013). A paper
by (Barcellini et al., 2012) defines a virtual wall
around an obstacle where a robot senses repulsive
forces which signal it to turn away from the obstacle.
The potential field method is the earliest and most
popular method used for obstacle avoidance. This
method is implemented by defining a potential field
of repulsive forces around the obstacle in the
workspace. The robot is able to sense this method and
adjust its posture to avoid the obstacle in the field.
Combining octree and potential field methods, the
manipulator is repelled by the obstacle and attracted
towards the goal configuration.
A study by (Leutert et al., 2012) implemented
Photonic Mixer Device that gathered depth
information of the robot environment. This
information was used to build an environment model
which served as an input for the path planning model.
The robot uses the data to autonomously select a path
to navigate towards the target position while avoiding
all static, dynamic and obstacles and continuously
optimising its trajectory.
A study by (Nieto et al., 2010) uses the RRT
(Rapidly-exploring Random Tree) method to plan a
path in a dynamic environment. New paths are
planned based on the mapped area of the robot
workspace. The main aspect of this research is
centred around an approach to formulating a cost
function for a motion planner for human-robot
collaboration. This method quantifies the consistency
of the robot’s motion so that it is predictable.
(Mišeikis et al., 2016) developed an algorithm that
avoids a human using lane differentiation. The robot
and human are represented in separate lanes and the
robot avoids the human without collision while
considering its tasks. This method was adapted from
aeronautic planes avoiding each other on runways.
Shorter and smoother trajectories where produced
when compared to reactive trajectory planning. A
method by (Jin et al., 2005) avoid obstacles while
positioning the end effector with on-line line collision
avoidance. The motion planning method is sensor
based and operates around unknown obstacles of
arbitrary shape. This method is an online collision
avoidance method that requires no prior knowledge
of the obstacles. A trajectory scaling algorithm for
safe Human-Robot Interaction that relies on a real-
time prediction of human occupancy was developed
by (Eder, 2014). By knowing the space that the
human will occupy and the robots stopping time, the
controller is able to scale the manipulator's velocity
for safe interaction.
4.5 Pre Collision Methods
Pre Collision methods are considered as preventative
methods and are intended to ensure safety during
Human-Robot Interaction. These methods are
implemented by monitoring the human and the robot
and then adjusting the robot controller according to
the feedback. The most common techniques and
methods are Quantitative Limits, Speed and
separation Monitoring and Potential Field Methods.
Quantitative Limits are described as a guarantee that
a robot cannot pose any threat to a human even if a
collision occurs. This is done by limiting parameters
such as joint velocity, energy and potential exertion
of force (Lasota et al., 2017).
When there is no human presence in the
workspace the motion can be maintained at the
maximum programmed speed. At this point, all tasks
and actions are taken as autonomous state behaviour.
When a human enters the workspace and is detected
by the robot the collaborative behaviour is activated.
The distance from the human to the robot manipulator
arm is constantly monitored. As the human
approaches the robot, the safety constraints cannot be
guaranteed while maintaining the production at
maximum level. The robot reduces its speed and
modifies its behaviour accordingly. If the robot
comes to a point where it could collide with the
human, the robot stopped. This should happen at 0
speed as the human is almost in contact with the
manipulator (Zanchettin et al., 2016).
5 SAFETY IN HUMAN-ROBOT
INTERACTION
This study contributes to the design of algorithms for
safe human-robot interaction. The proposed approach
is to develop a sensory system to detect humans in the
workspace of a robot and develop obstacle avoidance
and trajectory planning algorithms. The project will
be developed as described in Figure 1.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
246
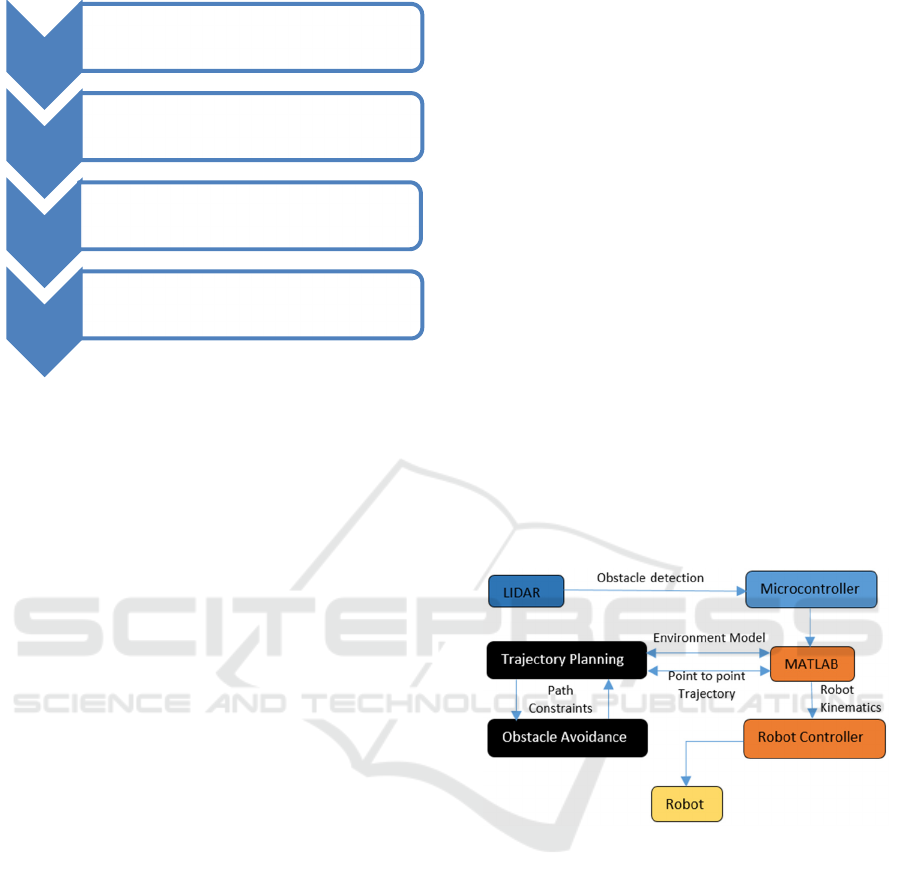
Figure 1: Development of Research Project.
This novel approach uses a LIDAR sensor. The
LIDAR model that will be used is a Garmin v3 Lite.
This sensor has a range of 10mm to 40m and a
frequency of 50 to 500Hz (Garmin, 2016). The
LIDAR is mounted on a pan-tilt mechanism to detect
the presence of humans in the workspace. The
LIDAR sends and receives a laser signal. When
connected to a microcontroller the distance data is
displayed as a 3D point cloud. When a human is less
than the specified distance away from the robot, the
robot will slow down and begin planning a new
trajectory. This approach is unique as LIDARs are
traditionally used to detect and track humans and
objects for mobile robotic applications. For this case,
it will be applied to a serial industrial robot
application.
The pan-tilt motion of the mechanism is created
using servo motors. The servo motor position is fed
into the control system and the location of the
obstacle is found using trigonometry.
The kinematics of the robot is calculated using
Peter Cork’s Toolbox. The algorithms will be
implemented on a six degree of freedom serial arm
industrial robot.
The environment will be modelled using an
octree. This method allows for fast path planning and
obstacle avoidance. The octree indexes three-
dimensional space such that the occupied state of
each region can be determined.
The path planning module will apply the A*
search algorithm in combination with local Hill
Climb and Simulated Annealing. This combination
was found to be most efficient by (Leutert et al., 2012)
The planner operates by searching for a path from the
starting position to the goal position using partial
local search algorithms. If no path is found the
planner uses the complete A* algorithm with a
modified distance estimator. The A* algorithm also
avoids singularities in the robot’s architecture. The
obstacle will be bound by a bounding volume
represented by geometric objects. When a robot
coincides with the bounding volume, the robot is too
close to the object and a new path should be planned.
The calculations, instructions, commands,
detection, mapping, path selection will be calculated
and simulated on MATLAB using Peter Corke’s
Toolbox. The virtual implementation allows safe
testing before the algorithms are implemented in a
real-world scenario. Peter Corke’s Toolbox will be
used as a solver to perform all kinematics
calculations. The proposed architecture setup is
presented in Figure 2.
This project addresses the issue of human safety
when working within the workspace of a robot. The
algorithm combination makes for suitable
pathfinding and obstacle avoidance. It is fast and
accurate providing reliable results. This method will
ensure that safety of the human in the robot
workspace.
Figure 2: Proposed Architecture Setup.
6 CONCLUSION
Autonomous factories are advancing swiftly with
more robots being implemented without fences. With
humans working in close proximity to the robot, it is
important to ensure that there are no injuries or
fatalities. A method of robot awareness and reactivity
are essential to ensuring safety. Visual systems notify
the robot of a human presence in its workspace.
Control systems allow the robot to adjust its path and
to avoid the human and generate a new path towards
its goal. The proposed method of obstacle avoidance
and trajectory planning will be tested and validated.
This method combines octrees and A* algorithm with
Phase 1
• Develope sensory system for obstacle
detection and visual awareness
Phase 2
• Develope safe control methods for
Obstacle avoidence and trajectoty planning
in real-time.
Planning
• Design algorithms for data processing and
predicting the location of the human in the
workspace
Testing
• Implement the algorithms for a serial robot
architecture
A Review of Safety Methods for Human-robot Collaboration and a Proposed Novel Approach
247

local Hill Climb and Simulated Annealing for reliable
obstacle avoidance and trajectory planning.
ACKNOWLEDGEMENTS
Gratitude and sincere thanks to the MR2G research
group for providing the environment and
infrastructure to make this research possible.
REFERENCES
Albu-Schäeffer, A., Bicchi, A., Chatila, R., Luca De, A.,
Giralt, G., Hirzinger, G., Mattone, R., Oriolo, G.,
Schiavi, R., Siciliano, B., Tonietti, G., Vendittelli, M.
& Luigi, V. 2005. Physical Human-Robot Interaction
In Anthropic Domains: Safety And Dependability.
Barcellini, A., Bascetta, L., Raymo, M., Rocco, P.,
Zanchettin, A. M. & Robertsson, A. 2012. Integrating
An Anti-Collision System Based On Laser Time-Of-
Flight Sensor In An Industrial Robot Controller.
Billard, A. & Dillmann, R. 2006. Social Mechanisms Of
Robot Programming By Demonstration.
Boryga, M., Graboś, A., Kołodziej, P., Gołacki, K. &
Stropek, Z. 2015. Trajectory Planning With Obstacles
On The Example Of Tomato Harvest. Agriculture And
Agricultural Science Procedia, 7, 27-34.
D. Gao, C. W. W. 2009. Head Injury Criteria: Assessing
The Danger Of Robot Impact.
Eder, K. H., Chris;Leonards, Ute 2014. Towards The Safety
Of Human-In-The-Loop Robotics: Challenges And
Opportunities For Safety Assurance Of Robotic Co-
Workers'. The 23rd Ieee International Symposium On
Robot And Human Interactive Communication, 660-665.
Flacco, F., Kröger, T., Luca, A. D. & Khatib, O. A Depth
Space Approach To Human-Robot Collision Avoidance.
2012 Ieee International Conference On Robotics And
Automation, 14-18 May 2012 2012. 338-345.
Fratu, A., Vermeiren, L. & Dequidt, A. Using The
Redundant Inverse Kinematics System For Collision
Avoidance. 2010 3rd International Symposium On
Electrical And Electronics Engineering (Iseee), 16-18
Sept. 2010 2010. 88-93.
Fryman, J. & Matthias, B. Safety Of Industrial Robots:
From Conventional To Collaborative Applications.
Robotik 2012; 7th German Conference On Robotics,
21-22 May 2012 2012. 1-5.
Garmin. 2016. Lidar Lite V3 Operation Manual And
Technical Specifications. Europe Patent Application.
Jin, B., Wang, S. & Yili, F. Sensor-Based Motion Planning
For Robot Manipulators In Unknown Environments.
2005 Ieee/Rsj International Conference On Intelligent
Robots And Systems, 2-6 Aug. 2005 2005. 199-204.
Kuka. 2014. Lbr Iiwa [Online]. Available: https://www.
Kuka.Com/En-Cn/Products/Robotics-Systems/
Industrial- Robots/Lbr-Iiwa [Accessed].
Lasota, P., Fong, T. & A. Shah, J. 2017. A Survey Of
Methods For Safe Human-Robot Interaction.
Letla, T. 2008 Introduction To Robotics
Leutert, F., Freier, C. & Schilling, K. 3d-Sensor Based
Dynamic Path Planning And Obstacle Avoidance For
Industrial Manipulators. Robotik 2012; 7th German
Conference On Robotics, 21-22 May 2012 2012. 1-6.
Marvel, J. A. Sensors For Safe, Collaborative Robots In
Smart Manufacturing. 2017 Ieee Sensors, 29 Oct.-1
Nov. 2017 2017. 1-3.
Mišeikis, J., Glette, K., Elle, O. J. & Torresen, J. Multi 3d
Camera Mapping For Predictive And Reflexive Robot
Manipulator Trajectory Estimation. 2016 Ieee
Symposium Series On Computational Intelligence
(Ssci), 6-9 Dec. 2016 2016. 1-8.
Mohammed, A., Schmidt, B. & Wang, L. 2017. Active
Collision Avoidance For Human–Robot Collaboration
Driven By Vision Sensors. International Journal Of
Computer Integrated Manufacturing, 30, 970-980.
Nieto, J., Slawiñski, E., Mut, V. & Wagner, B. 2010. Online
Path Planning Based On Rapidly-Exploring Random
Trees.
Pérez, L., Rodríguez, Í., Rodríguez, N., Usamentiaga, R. &
García, D. F. 2016. Robot Guidance Using Machine
Vision Techniques In Industrial Environments: A
Comparative Review. Sensors (Basel, Switzerland), 16,
335.
Robotics, M. C. 2019. Dual Check Safety (Dcs) Explained
[Online]. Available: https://motioncontrolsrobotics.
com/Dual-Check-Safety-Dcs-Explained/ [Accessed].
Robotics, R. 2017. Our Cobot Difference [Online].
Available: https://www.Rethinkrobotics.Com/ Sawyer/
[Accessed 8/05 2019].
Robotiq 2014. Colaborative Robot Ebook.
Shiyong Wang, J. W., Di Li, And Chunhua Zhang 2016.
Implementing Smart Factory Of Industrie 4.0: An
Outlook. International Journal Of Distributed Sensor
Networks, 2016.
Sousa E Silva, J., Costa, P. & Lima, J. 2013. Manipulator
Path Planning For Pick-And-Place Operations With
Obstacles Avoidance: An A* Algorithm Approach.
Zacharias, F., Borst, C. & Hirzinger, G. 2007. Capturing
Robot Workspace Structure: Representing Robot
Capabilities.
Zanchettin, A. M., Ceriani, N. M., Rocco, P., Ding, H. &
Matthias, B. 2016. Safety In Human-Robot
Collaborative Manufacturing Environments: Metrics
And Control. Ieee Transactions On Automation Science
And Engineering, 13, 882-893.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
248
