
Holonic-based Task Scheduling in Smart Manufacturing Systems
Valentin Vlad
Electrical Engineering and Computer Science Department, University of Suceava, Suceava, Romania
Keywords: Smart Factory, Industry 4.0, Holonic Control.
Abstract: The industrial domain undergoes a deep transformation, referred by the technical literature as the fourth
industrial revolution. The key element in this transformation is the integration of advanced digital
technologies in production, in order to improve the autonomy and interoperability of the participating
entities. In order to have a standard-based integration, a reference architectural model was proposed, RAMI
4.0, to guide the migration of the actual production systems to the next generation ones. In this paper we
discuss holonic-based solution for dynamical distribution of tasks in a smart manufacturing system,
according to the recommendations of RAMI 4.0.
1 INTRODUCTION
The industrial domain undergoes a deep
transformation, referred by the technical literature as
the fourth industrial revolution (Industry 4.0). The
key element in this transformation is the integration
of advanced digital technologies in production, in
order to improve the autonomy and interoperability
of the participating entities throughout the life cycle
of products.
An important component of I4.0 concept is
represented by the Smart Factories in which humans,
machines and resources communicate with each
other, like within a social network. In this aim, the
production devices are supposed to include
intelligent software components, enabling them to
autonomously control the execution of their task and
cooperate with each other for achieving the global
goals of the system they are part of. The
communication between these Cyber-Physical
Systems (CPS) is based on Internet of Things (IoT)
and Internet of Services (IoS) technologies, implying
the use of a service-oriented architecture (SOA) in
which each element of the value chain can be
accessed as services from other elements (Contreras
et al., 2017).
To have a structured and standard-based
integration of these technologies, the promoters of
the Industry 4.0 concept developed a set of
approaching guidelines in form of an architectural
model named RAMI 4.0 (Reference Architectural
Model for Industry 4.0). RAMI 4.0 describes also
the properties that CPS must meet in Industry 4.0.
They are seen as I4.0 components with the cyber
part represented by an “administration shell”,
designed to provide a description of the physical part
in the information world.
The administration shells
include a series of ‘sub models’, which represent
different aspects of the physical devices. These ‘sub
models’ are to be standardized so as a specific machine
can be easily found among many others I4.0
components. Several I4.0 components can be grouped
into a composite component and exhibit aggregated
functionalities through a high-level administration
shell, in the same way as individual components (Liu
and Xu, 2017).
These concepts developed in RAMI 4.0 make the
agent paradigm a very good candidate for developing
the smart factory goal of Industry 4.0 (Adeyeri et al.,
2015, Lu, 2017). Moreover, the holonic concepts
capture very well the properties of I4.0 components,
namely the autonomy, cooperation and recursive
encapsulation. In this paper we discuss a holonic-based
solution for dynamical distribution of tasks in a smart
manufacturing system, according to the recom-
mendations of RAMI 4.0.
2 HOLONIC-BASED
STRATEGIES FOR TASKS
SCHEDULING
Within a holonic system the scheduling of tasks can
be realized in a dynamical way, according to the
242
Vlad, V.
Holonic-based Task Scheduling in Smart Manufacturing Systems.
DOI: 10.5220/0007900202420245
In Proceedings of the 8th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2019), pages 242-245
ISBN: 978-989-758-373-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
status and loading of holons, through negotiation
activities. This work investigated two strategies for
task scheduling.
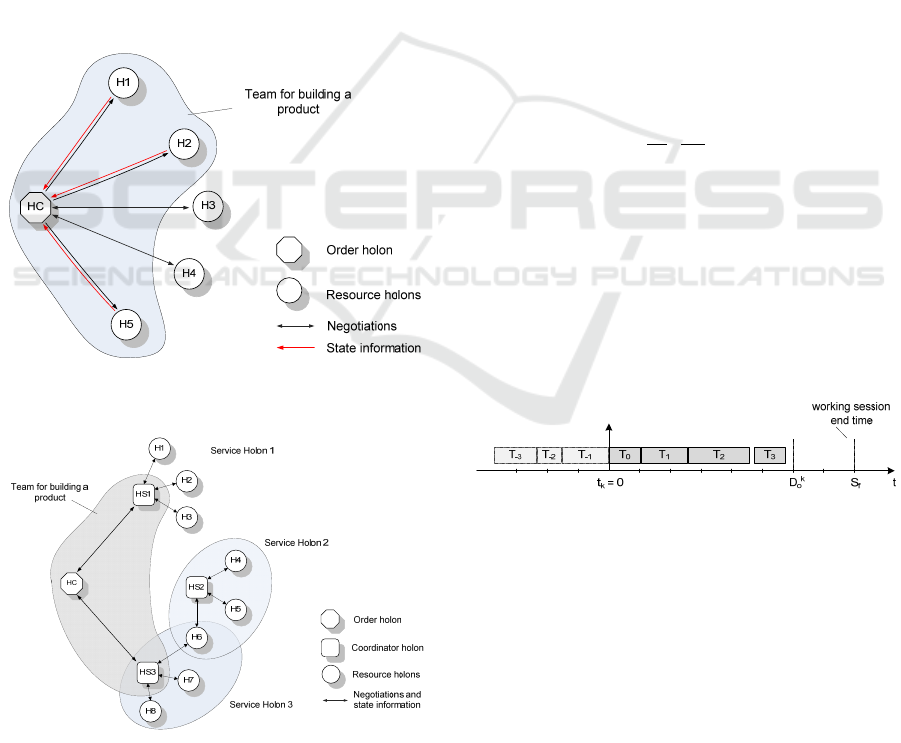
The first strategy is to conduct direct
negotiations between the order holons that
coordinate the execution of products and the holonic
devices in the system that perform their actual
processing (Figure 1). Considering the case of a
simple product, the corespondent order holon will
negotiate with all devices in the system capable of
executing the product operations and, based on the
received offers, will establish an execution plan that
will minimize the time to complete the product.
Problems in the operation of production equipment,
or changes in planning due to, for example, urgent
orders, will be announced to the order holons, who
will be able to re-plan their activities. Similarly, the
introduction of new equipment into the system can
be announced to the order holons to perform
replanning.
Figure1: Task scheduling through direct negotiations
between order holons and resource holons.
Figure 2: Task scheduling through hierarchical
negotiations.
The second, more advanced strategy, is to
organize the holonic devices in the system in holons
with complex intelligence (service holons),
depending on the services they provide. In this case,
for a particular task, an order holon will no longer
negotiate with each holon device that has the service
involved in the task, but only with the coordinator of
the complex holon corresponding to the service, as
illustrated in Figure 2. The coordinating holon will
negotiate with the subordinated holonic devices in
order to determine an optimal planning solution that
will be then transmitted to the order holon.
Within this organization, coordinator holons can
optimize system performance by looking for a
balanced load of subordinate holons. This balancing
can be provided for a certain time horizon, called the
optimization horizon, with a duration equal to a
fraction of the duration of the considered working
session. Considering for a holonic device the
notations for tasks and temporal constraints
illustrated in Figure 3, it is possible to define the
load of the holon at discrete moment k,
, of the
form:
1
∙
(1)
where:
– the total duration of tasks in the holon’s
agenda (planned for execution or in progress) at
discrete time k;
– duration of optimization horizon at discrete
time k;
– average task processing rate at discrete time
k.
Figure 3: Notation example for task and temporal
constraints of a holonic device
The planned duration of tasks in a holon's
agenda, at discrete time k, can be expressed by the
relationship:
(2)
where:
– the planned duration for the i-task at
discrete time k;
– total number of tasks in holon’s agenda.
Holonic-based Task Scheduling in Smart Manufacturing Systems
243

The optimization horizon at time k will be given
by the relation:
,
,
(3)
where:
– a predefined time for the optimization
horizon;
– session completion time;
– the current time.
The average task processing rate at discrete time k,
, can be defined as the arithmetic mean of the
processing rates of an arbitrary number of recently
completed tasks and the processing rate of the task
being executed, according to relationship (4). Within
this relationship, a task's processing rate is defined
as the ratio between the scheduled duration
and
the actual processing time
of the task.
∑
(4)
where:
– the actual processing time of the task
with index i at discrete time k. Negative value of
the index has the meaning of completed task.
– the task being executed at discrete time k;
– the number of the most recent completed
tasks considered for determining the task
processing rate
– validating coefficient.
The processing rate of the current task has
significance within equation (4) only if it causes a
deterioration of the average processing rate,
allowing to reflect the current holon problems in the
value of its load. Validation or invalidation of this
term is achieved by the coefficient
, defined as
follows:
0,
1,
(5)
where:
– mean processing ratio of tasks at discrete
moment k-1.
Therefore, the occurrence of delays in completing
the tasks (due to defects or delays in the delivery of
the semi-finished products) will lead to a decrease in
the task processing rate and implicitly an increase in
the loading of the holons.
According to the relation (1), the loading of a
holon at discrete time k can have a value:
sub-unitary, that is,
∈0,1, in which case
the holon is considered under loaded;
equal to the unit,
1, corresponding to a
100% loading of holon;
higher than one,
∈1,∞, in which case the
holon is considered overloaded.
The overload of a holonic device
, at discrete time
k, can be defined by the relationship:
1
(6)
and may have positive values (overloaded holon),
negative (underloaded holon), or may be zero (100%
loaded holon).
It is considered that a holon can enter into an
alert state when its overload at discrete time k
exceeds a certain threshold, called alert threshold.
The value of this threshold at time k,
, can be
given by the relation:
,
0,
(7)
where:
–a predefined threshold value that can be
identical for all holonic devices
According to the relationship (7), when the
remaining time until the end of the current session
becomes less than the predetermined optimization
horizon, the alert threshold value becomes 0 so that
any overload of the holon will lead to an alert state.
Considering a holon with complex intelligence
containing several holonic devices hi,
,
,…
, we can define the maximum and
minimum overloads of holon
at time k, as
follows:
,
,…
(8)
,
,…
(9)
A complex holon is considered to be in a state of
emergency when at least one holonic device in its
composition is in an alert state, that is
. A complex holon in a state of emergency will no
longer enter into negotiations for accepting new
tasks, but will try to redistribute the tasks among the
holons of its holarchy in order to eliminate all the
alert states. Negotiations can be resumed once the
alert states are eliminated, or when it is no longer
possible to transfer tasks among holons for reducing
their overloading.
MoMa-GreenSys 2019 - Special Session on Modelling Practical Paradigms of Green Manufacturing Systems
244

A holonic device
can accept new tasks, or
transfered from other holons, provided they do not
lead to an overload, according to the relationship:
0
(10)
or
10
(11)
Transfer of tasks within a complex hollow Hi can be
initiated both if a holonic device in its composition
enters an alert state (relationship 12), and when the
difference between the maximum and minimum
holon overload exceeds a threshold, called transfer
threshold
(relationship 13).
,
∈
(12)
(13)
This solution allows a continuous adaptation of the
system in presence of perturbations and an
optimization of production through a balanced
distribution of tasks between production facilities.
3 CONCLUSION
In conclusion, the application of holonic concepts in
the field of manufacturing systems allows the
development of dynamic and interactive control
solutions, with the potential to ensure both a rapid
response of the system to changes and an efficient
use of its resources. The industrial acceptance of
these solutions, however, continues to require
significant effort in the development of architectural
models, implementation platforms and case studies
to ensure the effectiveness of holonic industrial
control, both technically and economically.
This paper presented two holonic task scheduling
solutions for intelligent manufacturing systems. The
first solution, characterized by a flat organization of
resource holons, is efficient in dealing with
perturbations generated by workstation failures, but
implies a high complexity when a continuous
balanced distribution of tasks is desired.
The second solution considers a holarchical
organization of resource holons. Compared with the
first one this approach exhibits a higher adaptability
both in dealing with perturbations due to
workstations malfunctions as well as in
redistribution of tasks when a new device is added to
the system.
REFERENCES
Contreras, J.D., Garcia, J.I., Pastrana, D, Developing of
Industry 4.0 Applications, iJOE, Vol. 13(10), 2017,
pp. 30-47.
Lu, Y., Industry 4.0: A survey on technologies,
applications and open research issues, Journal of
Industrial Information Integration, Vol. 6, 2017, pp.
1-10.
Liu, C., Xu, X. Cyber-physical Machine Tool – The Era of
Machine Tool 4.0, Procedia CIRP, Vol. 63, 2017, pp.
70-75.
Adeyeri, M.K., Mpofu, K., Olukorede, T.A. Integration of
agent technology into manufacturing enterprise: a
review and platform for industry 4.0, 2015
International Conference on Industrial Engineering
and Operations Management (IEOM), IEEE (2015),
pp. 1-10.
Holonic-based Task Scheduling in Smart Manufacturing Systems
245
