
Towards Skills-based Easy Programming of Dual-arm Robot
Applications
Fan Dai
ABB Corporate Research, Ladenburg, Germany
Keywords: Dual-arm Manipulation, Robot Programming, Robot Skills.
Abstract: Programming dual-arm robotic applications requires good understanding of the tasks and the coordination
between both arms must be well specified. This article analyses the synchronization modes required in dual-
arm robot applications and describes a mechanism of programming these applications based on synchronizing
the execution phases of robot skill functions for the two arms. Combined with a graphical user interface, it
contributes to the ease of use of dual-arm robot systems.
1 INTRODUCTION
Dual-arm, or two-handed manipulation has been an
interesting topic in robotics since the very beginning
of robotics research related to tele-operation, and it is
again of high interest with new developments in
service and industrial robotics (Smith et al., 2012).
Many efforts and advances are known in control of
coordinated motion, but the programming of dual-
arm manipulation is still one of the main bottlenecks
of application development, because programming
dual-arm robot applications requires very good
understanding and specification of the coordination
between the two arms.
Zöllner et al., (2004) worked on programming by
demonstration for dual-arm manipulation tasks,
where task executions are modelled with Petri nets.
Having the arm states active or ready as conditions,
dual-arm task planning and execution can be learned
by mapping observed bimanual human
demonstrations. While this method is theoretically
quite promising, many problems still must be solved,
especially the interpretation of human intentions in
complex situations.
The concept of robot skills (e.g. Kröger et al.,
2010, Thomas et al., 2013, Dai et al., 2016) has been
introduced to allow task-level programming, which is
more intuitive for application engineers. Theoretical
concepts cover the coordination of parallel tasks as
well, but most approaches are still focused on single
arm application tasks, or tasks where two robot
manipulators must avoid collisions with each other.
An appropriate mechanism for two-arm robot
application tasks is needed.
Szynkiewicz (2012) worked on skill-based
bimanual manipulation planning, uses Rubik’s Cube
as an example to implement a two-handed
manipulation skill involving vision and force control.
However, the mechanism of specification and
realization of coordinated dual-arm tasks is not
clearly described.
Stenmark et al., (2017) worked on improving
intuitive dual-arm programming of collaborative
industrial robots, utilizing the concept of re-usable
robot skill functions, where the focus was on
synchronizing primitive dual-arm motion constructs.
They also combined it with an iconic graphical user
interface, allowing adding and modifying
synchronizations, but limited to primitive motion
synchronization.
Our approach goes further to a mechanism of
creating dual-arm robot skills by analysing and
specifying the synchronization of single arm robot
skills. It allows an easier way of programming
bimanual application tasks.
In this paper, we analyse two-handed
manipulation taking assembly applications as an
example (section 2). Based on this, we derive in
section 3 our concept of synchronizing two-arm tasks
by introducing phase-based synchronization. We
propose to implement robot skill functions with
clearly defined phases and synchronization points,
which can be parameterized, optionally via a
graphical user interface.
Dai, F.
Towards Skills-based Easy Programming of Dual-arm Robot Applications.
DOI: 10.5220/0007920203630370
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 363-370
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
363

2 TWO-HANDED ASSEMBLY
TASKS
In this section, we take an application-oriented view
on dual-arm manipulation, focusing on assembly
tasks. Applications in which two-handed operations
come into play can be grouped as follows:
Coordinated parallel tasks
In-hand manipulation using one hand as part
holder (fixture) for the other one
In-hand manipulation with simultaneous actions
of both hands
In the following, we analyse these three groups of
applications with some examples.
2.1 Coordinated Parallel Tasks
These types of applications may be further split into
two sub-groups. For most cases in the first sub-group
the overall task could be done by a single hand. Doing
it with two hands simply increases the efficiency or
shortens the cycle time.
For example, when piling up objects onto each
other, a single robot arm could take the parts one by
one and accomplish the task alone. But doing it with
two robot arms is much quicker. The same holds
when multiple different parts are to be mounted.
Similarly, in many applications, one arm is used to
take the raw part and place it at the location for
processing. The other arm then retrieves the finished
part.
Figure 1: Piling-up cubes with coordinated parallel tasks.
The second sub-group includes applications in
which two hands are needed to accomplish the task,
but they do not come into direct mechanical or spatial
interaction with each other, for example: One hand
opens the cover; the other one puts the part into the
container.
In these two-handed applications, compared to
single hand operation, the actions of both hands must
be synchronized with each other, but not the motion
details. Important are: 1) Temporal dependencies of
starting and ending the actions; 2) Spatial collision
avoidance.
The goal is to achieve the shortest cycle time. If
the constraints on cycle time allow, one can also try
to optimize energy consumption, minimize
mechanical stress etc.
2.2 One Hand as Part Holder for the
Other One
At manual workplaces, we can very often observe
two-handed operations in which one hand acts as a
part holder for the other hand. Here we can have the
following situations:
2.2.1 The One Hand Holds a Part, and the
Other Hand Mounts a Second Part
onto It
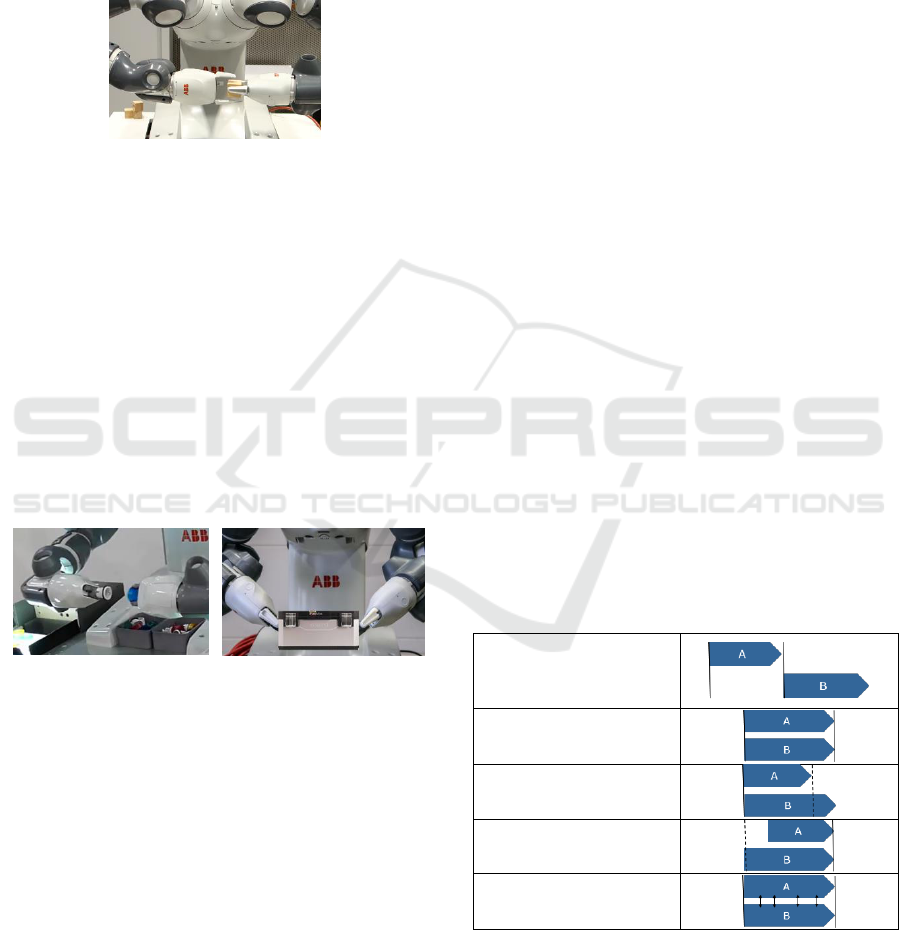
As shown in Figure 2, one of the robot hands holds
the base part, while the other hand mounts the other
part onto it. This is the most common case. In this
case, the first hand must maintain a fixed position for
the duration of the part assembly by the other hand.
a) Snap insert
b) Screwing
Figure 2: Examples of two-handed assembly with one hand
as part holder.
2.2.2 The One Hand Holds a Part, and the
Other Hand Mounts This Part onto
Other Part
The pictures below show a connector on a flexible flat
cable. One hand must place the part on top of the
socket, so that the other hand can then push on the
connector to mount it firmly.
a) Connector and
socket
b) Approaching
the target
c) At the target
position
Figure 3: One hand supports the other to fix the socket plug.
In this kind of applications, the first hand must be
compliant, following slightly the movement of the
part when the part is moved by the other hand while
mounting it.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
364
2.2.3 The One Hand Hands over a Part to
the Other Hand
When a part cannot be reached by the one hand that
should operate with the part, or it can be reached, but
cannot be picked at the right position, a commonly
used option is to take the part by another hand first,
and hand it over to the operating hand.
Figure 4: Handing over the cube.
In this case, there is a hand-over phase for a short
while, requiring synchronization as the second hand
takes the part.
2.2.4 Simultaneous Actions of Both Hands
The screw-mounting example can also be done by
simultaneously turning the two parts counter-wise.
This shortens the time for this task. In addition, if the
rotation of the last robot joint is used to screw the part,
like in this example, simultaneously turning both
parts avoids re-grasping, which may become
necessary due to joint limits in case of turning one
part only.
a) Screwing with both hands
b) Lifting with both hands
Snap insert Screwing
Figure 5: Examples of simultaneous actions.
Another example is using two hands to take a
relatively large part and perform placing or mounting.
Compared to a single-handed grasp, this can avoid
undesirable torques on the gripper tool.
In such applications, the motions of both hands
must be synchronized, or one of the hands must
follow the other hand for defined phases of motion.
3 SYNCHRONIZATION OF BOTH
HANDS
A two-handed robot task is composed of at least two
sub-tasks, each performed by one of the robot hands.
If the robot hands are programmed so that each of the
hands executes their own skills, these skill functions
must be coordinated with each other. The most
important criteria are: 1) Ensure that the main phase
of the desired task succeeds; 2) Achieve the shortest
cycle time. Since the duration of individual tasks
differ, it is usually not possible to schedule bimanual
manipulation without waiting times. When the
success of a two-handed manipulation task requires
one hand to wait on the other, optimal scheduling can
avoid excessive waiting times.
In the following, we consider the general modes
of synchronization between parallel processes and the
execution of skill functions as well as the
corresponding (sub-) tasks of an application, and then
discuss how the different types of two-handed
operations can be synchronized.
3.1 Synchronization Modes
Theoretically, five modes of task synchronization can
apply (Table 1). However, not all of them are
essential for two-handed assembly. The most
common mode is of type a) End-start
synchronization. Special applications require
synchronous motion (type e). Other modes can be
beneficial in some cases but are not necessarily
required.
Table 1: Task synchronization modes.
a) End-start: Start of task A
(e.g. left arm) waits until
end of task B (e.g. right
arm)
b) Start-start & end-end:
Starting and ending at the
same time.
c) Start-start: synchronous
start, free ends
d) End-end: free starts,
synchronous ending
e) Synchronous motion: The
complete motions of both
hands are synchronized
To know which mode is required in which
situation, we analyse in more detail below the phases
of assembly skills as they are executed by one hand,
and how they can be used in the two-handed
Towards Skills-based Easy Programming of Dual-arm Robot Applications
365
application examples.
3.2 Phases, States, and Events
If we look at manipulation tasks with one robot arm,
typically, they consist of the following major
execution phases:
Approach – go to the starting position for the
main phase
Main phase – execute the intended action, such
as grasping, pushing, insertion, snapping,
screwing, etc.
(Optional) Release – release the work piece e.g.
by opening the gripper, if is holds the part
Depart – move away from the current work area
The details of the main phase depend on the type of
actions. Taking snap insertion as example, we can
have the following sub-phases:
Push towards the goal position with compliance
until measures of completion are met
Check for success, if necessary, by trying to pull
the part back, or move around, or by any other
means of sensing
Error handling, e.g. retry, dispatch, or report
error.
While moving towards the goal position (approach or
push), it can happen that the part misses the correct
starting position for insertion and touches the base
object. In this case, an additional phase is necessary:
Search for the correct starting position.
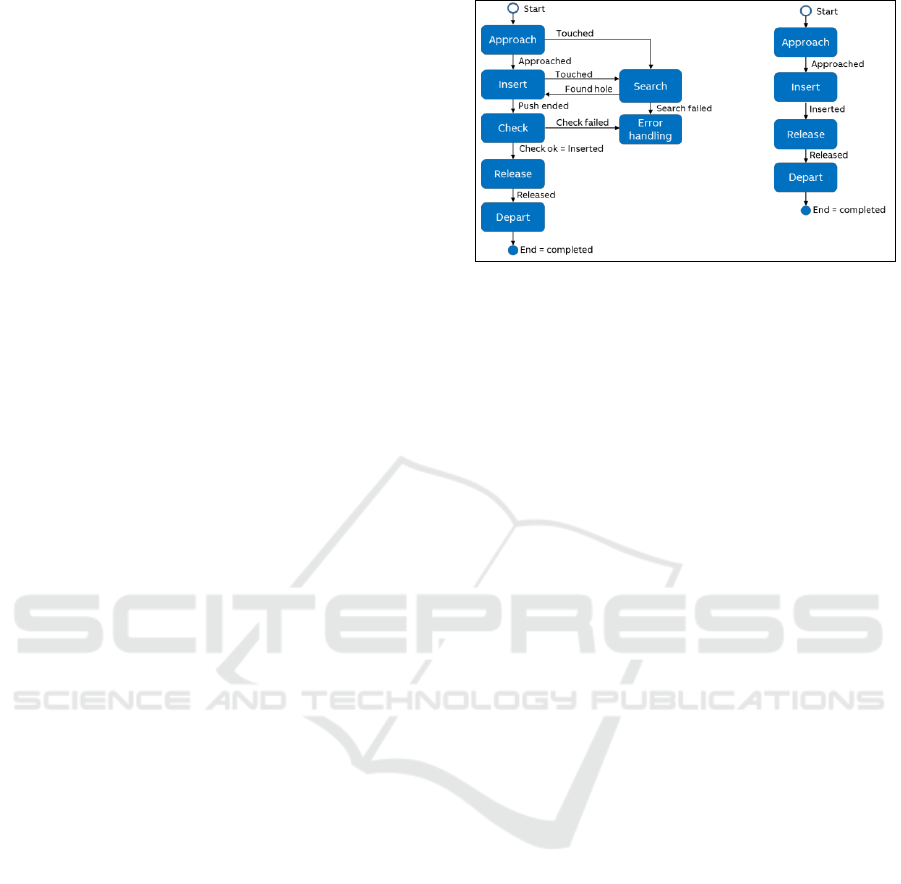
The above described phases and their conclusions are
actually the significant states of the snap insert
execution. Each phase change (state transition) can be
exposed to another task for synchronization. While
the phases are natural states, the phase end states
would automatically be the start states for the next
phase, if no waiting for external events is introduced.
Figure 6 shows a flow chart with these phases and
phase changes. The Search phase can be entered from
the Approach phase, when the part contacts the base
object while moving towards an incorrectly defined
start position, or from the Insert phase, when the
Insert phase starts from an incorrect position. In both
cases, the part would touch the surface of the base
object in an unintended way.
From a task-oriented point of view, Search, Check
and Error-handling are internal phases that do not
reflect the intended states of task accomplishment. A
synchronization of such phases with external actions
is not required in general, except for certain error
states, if strategies for error handling involving both
hands are introduced. But error handling is a very
a) State model with internal phases b) Simplified model
Figure 6: Phase of snap insertion.
complex and special topic, which we do not further
discuss in this article.
For simplicity, we use in the following the
simplified state model shown in Figure 6 b), in which
insertion can be replaced by other skills such as
screw-driving, etc.
3.3 Two-handed Operations with
Synchronization
When looking into the application examples, we can
group them into: 1) Sharing work space; 2) One hand
as part holder; 3) Hand-over; 4) Two-handed
symmetric assembly; 5) Two-handed synchronous
motion. In the following, we discuss how these
groups of applications can be implemented with
corresponding phase synchronizations.
3.3.1 Sharing Work Space
In case both hands must accomplish actions within
the same work space, they cannot execute these
simultaneously. Sometimes, the order of the actions
is defined by the application itself; sometimes
serialization is needed for collision avoidance.
For example, the piling-up example could be done
by two-hands with one waiting for the other to finish
its placing action (Figure 7).
But this may cause unnecessary waiting time. In
this example, the most feasible way is in fact, that one
hand waits at an intermediate approaching position
until the other hand has left the departing position.
Thus, introducing intermediate synchronization
points can reduce the overall cycle time. Here, depart
(of one hand) and approach phase (of the other hand)
each can be split into two sub phases for better
synchronization (Figure 8), but the synchronization
mode is still “end-start” sequencing of these two
phases.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
366
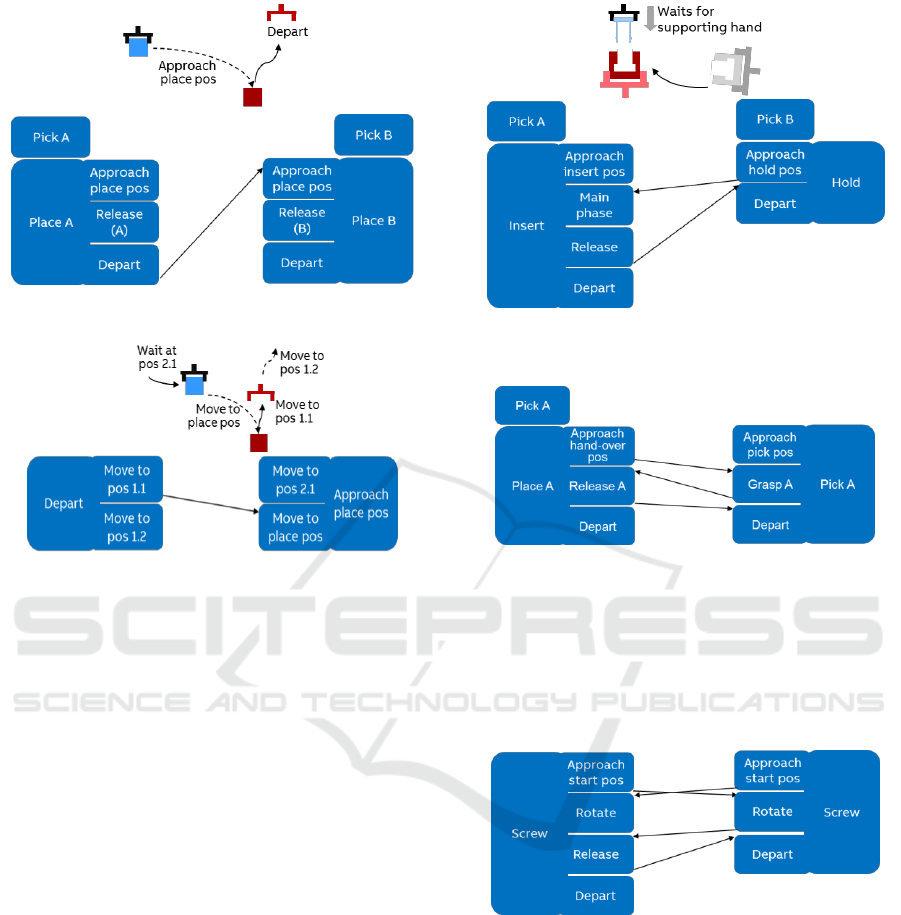
Figure 7: Piling up with two hands.
Figure 8: Use sub phases to reduce cycle time.
This intermediate approach position is normally
different from the approach position of single hand
operations, because it must ensure that no collision
with the other hand can occur.
3.3.2 One Hand as Part Holder
When one hand acts as part holder like in the two-
handed snap-insertion example, it requires that the
supporting hand is in position before the inserting
hand starts the main phase of insertion, but the latter
can already move to the approaching position. This
can be simply implemented using “end-start”
synchronization as depicted in Figure 9.
Certainly, it could also run with synchronized
ends of the approaching phases. However, this does
not lead to any benefits.
3.3.3 Hand-over
For hand-over operations, the one hand releases the
part after the other hand has picked it. It is again a
simple “end-start” relationship between the
corresponding phases as depicted in Figure 10.
Figure 9: Using “end-start” for synchronization of two-
handed insertion.
Figure 10: Synchronizations for hand-over.
3.3.4 Two-handed Symmetric Assembly
As shown in Figure 11, two-handed symmetric
assembly (taking the example of screwing) always
can be implemented using “end-start”
synchronization as well.
Figure 11: Using “end-start” synchronization in two-
handed symmetric screwing.
This is equivalent to “start-start” synchronization
of the rotate phases, if no additional waiting time
before the starts of these phases is introduced by other
events that are in principle possible, but not relevant
here. Of course, symmetric assembly could also be
implemented with synchronized start and end (“start-
start & end-end”) of corresponding phases of both
hands (e.g. Figure 12.), though this is not really
required. In the practice, “end-start” synchronization
is easier to implement.
Towards Skills-based Easy Programming of Dual-arm Robot Applications
367
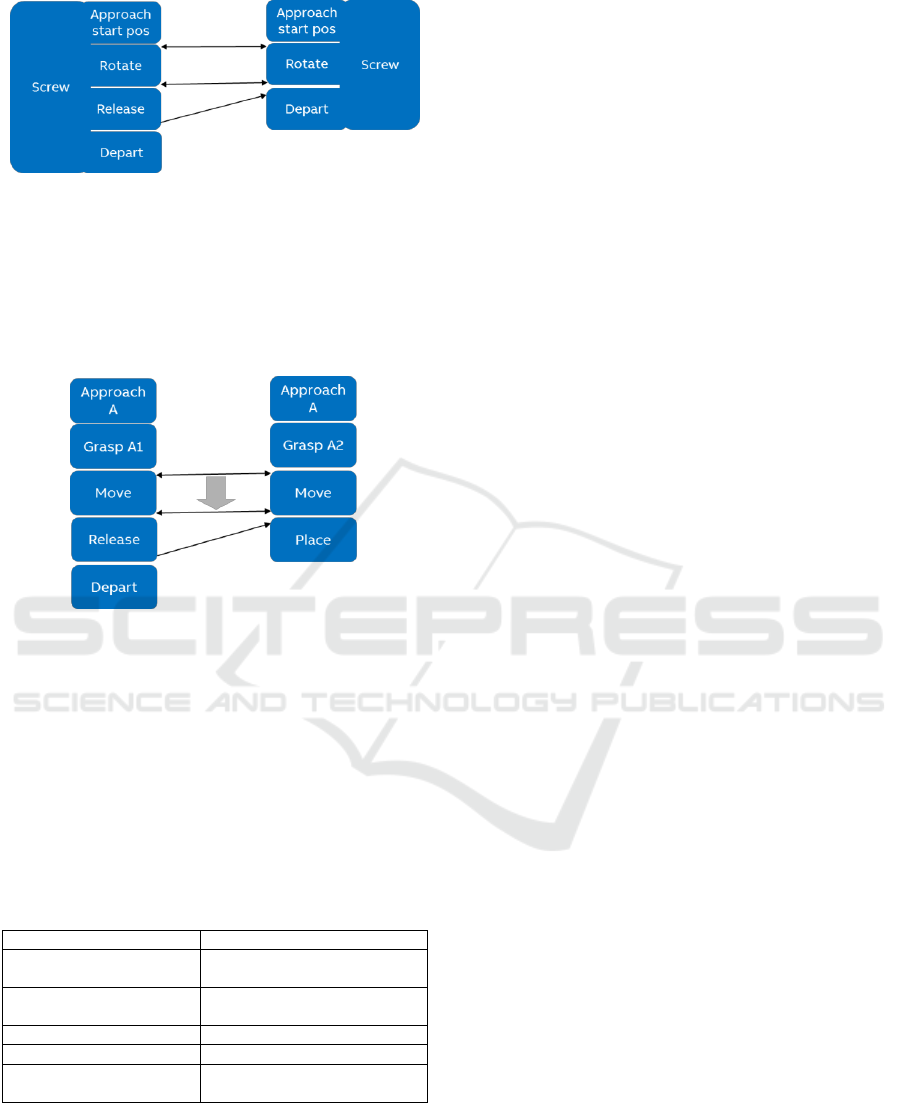
Figure 12: Using “start-start & end-end” for two-handed
symmetric screwing.
3.3.5 Two-handed Moving
Different from the above use cases, synchronous
motion is required in such special cases as lifting or
moving a large or heavy part with two hands.
Figure 13: Synchronous motion (may also require
simultaneous release).
3.4 Usage Summary of
Synchronization Modes
Based on the above observations, we can conclude
that “end-start” is the most commonly used mode,
where “synchronous motion” is required for special
cases. Other modes are not necessary for
implementing two-handed assembly applications.
Table 2: Usage of synchronization modes.
Synchronization mode
Usage
End-Start
Most applications can be
implemented this way
Start-start
Can be achieved with “End-
start” mode (see e.g. Figure 12)
Start-start & end-end
Not required
End-end
Not required
Synchronous motion:
Required in special cases e.g.
two-handed lifting
4 ROBOT SKILLS AND VISUAL
PROGRAMMING
From a programming point of view, robot skill
functions are nothing else than higher-level
parameterizable functions. These can be used by
application programmers in any programming
environment with any programming tools including
simple text editors. We also proposed to use visual
programming for guiding and assisting the
application programmer to use skill functions in an
intuitive way (Dai et al., 2016).
In a concept demo implementation, the skill
description is stored in XML format including:
function name, parameters, locations of other related
data, e.g. source code of the skill function, support
functions used by the skill function or for applying it,
UI elements that can be optionally used, description
and help text, including multimedia presentations.
For the UI and multimedia presentations, XAML was
chosen, which can be dynamically loaded to the App
to provide individually customized user interface
pages.
According to our phase-based synchronization
concept, parameters of the skill functions also include
skill phases and the skill execution state.
Taking a snap insertion skill programmed in the
robot programming language RAPID as an example,
the robot skill functions have the following constructs
allowing the synchronization concept described in the
sections above:
PROC SnapIn(pose StartPose,
\pers state myState,
\pers state waitToStart,
\state waitToStartValue,
\pers state waitToInsert,
\state waitToInsertValue,
\pers state waitToRelease,
\state waitToReleaseValue,
\pers state waitToDepart,
\state waitToDepartValue)
myState := stateWaiting;
IF (Present(waitToStart) AND
Present(waitToStartValue))
THEN
WaitUntil
(waitToStart>=waitToStartValue)
\pollrate:=0.004;
ENDIF
myState := stateApproaching;
!start approaching
…
!end approaching
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
368
myState := stateApproached;
IF (Present(waitToInsert) AND
Present(waitToInsertValue))
THEN
WaitUntil
(waitToInsert>=waitToInsertValue)
\pollrate:=0.004;
ENDIF
myState := stateInserting;
! start inserting
…
!do something
myState := stateEnd;
ENDPROC
The user can compose the action sequences for each
robot hand (i.e. the corresponding robot control task)
by selecting and concatenating these skill functions
and program elements.
To compose two-handed applications, one usually
also must specify the synchronization points for the
two hands. This can be done based on the concept as
discussed in the previous chapter. The UI page is
shown below in Figure 14.
Figure 14: Skill phase synchronization page (arrow
indicates the order).
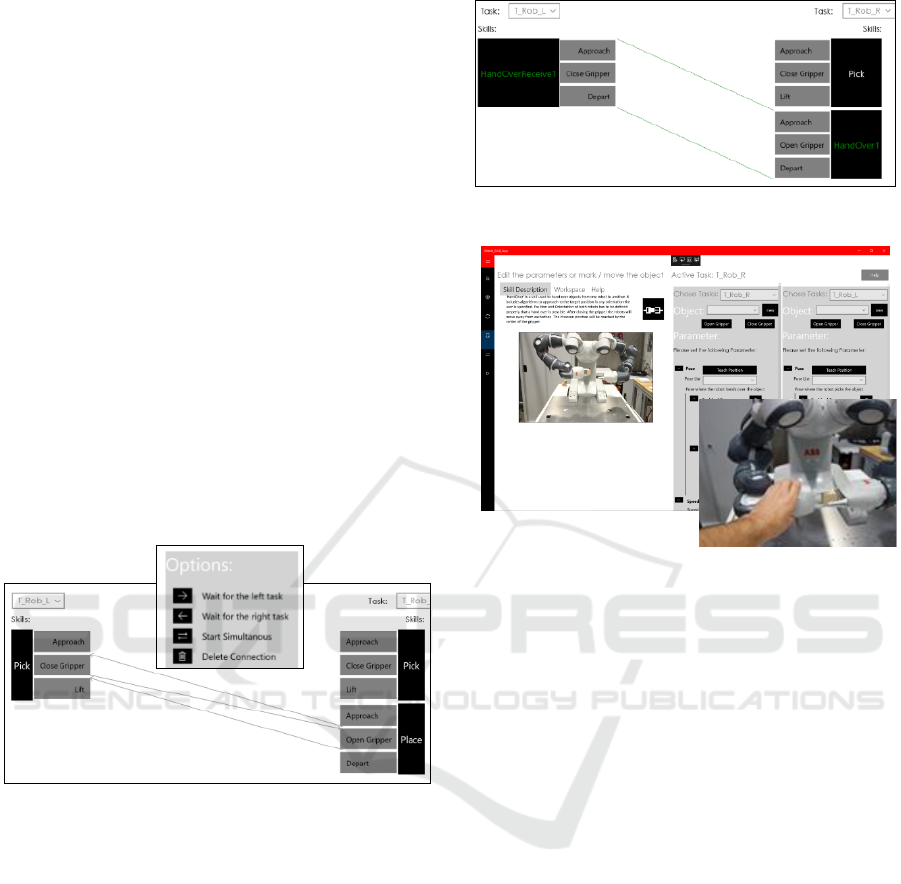
For a pre-defined two-handed skill, there is no
need for manual editing of the synchronization points.
Therefore, we have chosen a different type of
visualization (two lines without arrows) as shown
below in Figure 15. It indicates that both skills are
considered as a unit, so that user doesn’t need to see
the internal synchronization.
Typical for two-handed skills, some motion
positions can be taught for both hands together, e.g.
via lead-through as shown in Figure 16.
Finally, the app will create the main modules for
the robot control tasks, which call the corresponding
skill functions with these parameters (including
synchronization points). The finished application is
then ready to be started.
Figure 15: Hand-over as two-handed skill function.
Figure 16: Teaching motion positions for both hands.
5 CONCLUSIONS AND FUTURE
WORK
The robot skills concept can be applied to support
more intuitive and easy programming of two-handed
robot applications by synchronization of skill
execution phases. Our analysis has shown that the two
basic synchronization modes: end-start
synchronization and synchronous motion are
sufficient for all these applications. With pre-
implemented synchronization points and optional
parameters, the skill functions can be flexibly used by
application programmers for different situations.
Visual programming can also contribute to ease of
use. The skill execution phases can be shown beside
the skill function. Known graphical interaction
methods can be applied to define the synchronization
between skill functions of the two robot hands, e.g.
by connecting anchor points of the graphical
elements.
Still, programming two-handed applications
requires good knowledge of the skill functions, the
synchronization modes, and logical reasoning. To
further increase ease of use of robot systems like
YuMi, two-handed skills or skill templates may be
provided. Such skills may consist of pairs of skill
functions for both hands with well-defined
Towards Skills-based Easy Programming of Dual-arm Robot Applications
369

synchronizations, considering the following two-
handed operations:
Sharing work space
One hand as part holder
Hand-over
Two-handed symmetric assembly
Two-handed moving of parts
In this context, we did experimental implementations
of “hand-over” and “sync move” (two-handed
moving of parts) with corresponding user interface
elements.
Certainly, the mechanism of synchronization
enables two-handed applications, but the efficiency of
such applications depends also on other factors that
influence the behaviour of the robot hands, e.g. the
“intelligence” of the underlying skill functions, the
execution parameters of the primary functions used
by the skills. These are also coupled with the skill
phase design and synchronization type. Therefore, we
will further work on studying the correlations
between both, and how machine learning methods
can help to increase efficiency of two-handed skills
and two-handed applications.
ACKNOWLEDGEMENTS
Research partially supported by European Union as
part of the Productive 4.0 project
(https://productive40.eu).
REFERENCES
Smith, Ch., Karayiannidis, Y., Nalpantidis, L., et al. (2012)
“Dual arm manipulation—A survey”. Robotics and
Autonomous Systems 60(10), October 2012. pp. 1340–
1353.
Zöllner, R., Asfour,T., Dillmann, R. (2004) “Programming
by demonstration: dual-arm manipulation tasks for
humanoid robots”. IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), Sept. 2004.
Kröger, T., Finkemeyer, B., and Wahl, F. M. (2010)
“Manipulation primitives—A universal interface
between sensor-based motion control and robot
programming,” in Robot Systems for Handling and
Assembly, 1st ed., ser. Springer Tracts in Advanced
Robotics, D. Schütz and F. M. Wahl, Eds. Berlin,
Heidelberg, Germany: Springer, 2010, vol. 67.
Thomas, U., Hirzinger, G-, Rumpe, B., Schulze, Ch. and
Wortmann, A. (2013) A New Skill Based Robot
Programming Language Using UML/P Statecharts,
2013 IEEE International Conference on Robotics and
Automation (ICRA), Karlsruhe, Germany, May 6-10,
2013
Dai, F., Wahrburg, A., Matthias, B., Ding, H. (2016)
“Robot Assembly Skills Based on Compliant Motion”,
47th International Symposium on Robotics (ISR 2016),
June 2016
Szynkiewicz, W. (2012) “Skill-Based Bimanual
Manipulation Planning”, Journal of
Telecommunications and Information Technology,
2012(4): December 2012, pp. 54-62
Stenmark, M., Topp, B.A., Haage, M., Malec, J. (2017)
“Knowledge for Synchronized Dual-Arm Robot
Programming”, AAAI Fall Symposium Series 2017.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
370
