
Human-aware Robot Navigation in Logistics Warehouses
Mourad A. Kenk
1,2 a
, M. Hassaballah
3 b
and Jean-Franc¸ois Breth
´
e
1 c
1
Electrotechnics and Automatics Research Group (GREAH), Normandy University, Le Havre, France
2
Department of Mathematics, South Valley University, Qena, Egypt
3
Department of Computer Science, South Valley University, Luxor, Egypt
Keywords:
Human-aware Navigation, Collision Avoidance, Human Detection in RGB-D Camera, 2D-LIDAR Sensor,
Logistics Warehouses, Mobile Robot Autonomous Navigation, Robotics.
Abstract:
Industrial and mobile robots demand reliable and safe navigation capabilities to operate in human populated
environments such as advanced manufacturing industries and logistics warehouses. Currently mobile robot
platforms can navigate through their environment avoiding coworkers in the shared workspace, considering
them as static or dynamic obstacles. This strategy is efficient for safety, strictly speaking, but is not sufficient
to provide humans integrity and comfortable working conditions. To this end, this paper proposes a human-
aware navigation framework for comfortable, reliable and safely navigation designed to run in real-time on a
mobile robot platform in logistics warehouses. This is accomplished by estimating human localization using
RGB-D detector, then generating a virtual circular obstacle enclosing human pose. This virtual obstacle is
then fused with the 2D laser range scan and used in ROS navigation stack local costmap for human-aware
navigation. This strategy guarantees a different approach distance to obstacles depending on the human or
non-human nature of the obstacle. Hence the mobile robot can approach closely to pallet to pick up objects
while maintaining an integrity distance to humans. The reliability of the proposed framework is demonstrated
in a workbench of experiments using simulated mobile robot navigation in logistics warehouses environment.
1 INTRODUCTION
In logistics warehouses, pick and place mobile robots
are designed to navigate in an environment often
structured in long and narrow aisles. Robots need to
approach very closely the racks located on the side
of the aisle (Wahrmann et al., 2017). In the same
time, robots are likely to cross human coworkers. Hu-
mans need to feel safe in their personal space when
sharing workspace with robots. In vision-based au-
tonomous navigation, several typical obstacle avoid-
ance methods have been proposed recently. Krajnik
et al. (Krajn
´
ık et al., 2017) proposed to use hetero-
geneous visual features such as points, line segments,
lines, planes, and vanishing points to process a visual
simultaneous localization and mapping (SLAM) or to
use depth information from a low-cost sensor (RGB-
D) to localize the obstacles. In (Yang et al., 2016),
a nonlinear controller is designed to achieve target
tracking and obstacle avoidance in complex environ-
a
https://orcid.org/0000-0002-2374-4032
b
https://orcid.org/0000-0001-5655-8511
c
https://orcid.org/0000-0002-6962-954X
Figure 1: Example of an output frame of ROS based human
perception process, showing detector and localizer results
in RViz.
ments. In (Malone et al., 2017), stochastic reachable
sets are used to generate accurate artificial potential
field for dynamic obstacles for online path planning.
In (Nardi and Stachniss, 2017), a probabilistic ap-
proach is developed for modeling uncertain trajecto-
ries of the moving entities that share workspace with
robot.
Kenk, M., Hassaballah, M. and Brethé, J.
Human-aware Robot Navigation in Logistics Warehouses.
DOI: 10.5220/0007920903710378
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 371-378
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
371

Most of the previous research works consider hu-
mans as dynamic obstacles using different techniques
and sensing modalities. Nevertheless, considering hu-
mans as dynamic obstacles to simply avoid them is
certainly sufficient from the safety point of view, but
can cause annoyances for humans. Indeed, proxemics
theory, one of the most popular principles in Human
Robot Spatial Interaction (HRSI), advises to select
appropriate interaction distances between robots and
humans (Lindner and Eschenbach, 2017). The robot
should keep a certain distance from a human while
navigating, preferably greater than 1.2m not to vio-
late the Personal Space (PS).
Currently, many researches are devoted to design
navigation approaches with safety control in com-
plex environments. For instance, Choi et al. (Choi
et al., 2017) proposed Gaussian process motion re-
gression based robot navigation, which predicts fu-
ture trajectory of human with two Microsoft Kinect
sensors in dynamic environments. In (Song et al.,
2017), a shared-control scheme based navigation is
proposed via combining active obstacle avoidance
and passive-compliant motion behavior prediction for
human, where walking-assistant robot avoids colli-
sion and allows safe guidance for human using leg
detector by 2D laser sensor. In (Zimmermann et al.,
2018), the robot trajectory planning is done by esti-
mating 3D human pose in RGB-D images while exe-
cuting tasks in cluttered environments occupied with
different features of the obstacles.
Numerous solutions have been presented for hu-
man detection and tracking in a human populated
environment based on 2D Laser range sensors (Lin-
der et al., 2016; Song et al., 2017). The core idea
of human detection is a binary classifier trained on
leg appearance features that is reflected by beams of
2D laser sensor. First, the reflected 2D laser data
(points) is segmented according to Euclidian distance
(jump distance) between continuously neighboring
2D points. These segments are then classified as a
human leg if it scores approximation values of 2D ge-
ometrical structure features, which are characterized
by pre-defined fourteen parameters such as number of
reflected points, width, linearity, circularity, radius as
described by (Arras et al., 2007). Nevertheless, even
if these methods achieve great performances in air-
port and hospital environment, they are not applicable
in logistics warehouses environment due to the high
number of false detection as reported in this study.
On the other hand, human detectors based on 3D vi-
sion show high performances in industrial environ-
ment (Munaro et al., 2016) and intralogistics ware-
houses (Linder et al., 2018).
For these reasons, the main goal of this research is
to design a human-aware navigation framework that
makes the robot behaviour more sociable (as shown in
Figure 1). It implies being able to distinguish between
human and non-human obstacles, which is currently
the case in the state-of-the-art. We investigate the
constraints of human detection algorithm implemen-
tation taking into account different point of view, from
the computational costs, to the safety and proxemics
theory requirements. The proposed framework is de-
signed to be optimal in logistics warehouses environ-
ments with their specific properties and constraints.
Then, the functionality of the framework is proved
in an experiment based on autonomous Summit XL
mobile robot in a logistics warehouses simulated en-
vironment relying on the well known Robot Operat-
ing System (ROS) (Quigley et al., 2009). To illus-
trate, one of the powerful ROS toolbox is Navigation
Stack
1
which detects obstacles through 2D laser sen-
sor in real time. Then, inflation layer is created with
around obstacles by inflation radius value to avoid the
collision. The idea is to use a small inflation radius
value that allow pick and place mobile robot to close
enough to its targets that are installed in selective
racks. Additionally, coworkers safety area is manip-
ulated as a circular obstacle fused in laser scan data.
The final achievement of this research is a global ar-
chitecture keeping a balance between real-time con-
straints leading to investment and operational costs
and societal issues to make the human working con-
ditions more comfortable.
This paper is structured as follows: Section 2
describes the proposed sensor interaction algorithm
for human-aware mobile robot navigation in logistics
warehouses. Section 3 presents experimental results
demonstrating the advantages of the proposed frame-
work. Finally, conclusions are drawn in Section 4.
2 HUMAN-AWARE NAVIGATION
FRAMEWORK
2.1 Mobile Robot Navigation
ROS is a compilation of tools, libraries, and utili-
ties which facilitate the design of complex robot tasks
through powerful algorithms implementation such as
Navigation Stack which is composed of several algo-
rithms (ROS nodes). These nodes are communicating
via publish/subscribe message-oriented middleware.
For each ROS node, information is sent/received via
a given topic as a structured data message. Conse-
quently, a variety of information patterns can be ex-
1
ROS navigation, http://wiki.ros.org/navigation.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
372
ROS Navigation Stack
move_base
Localization
Safety area
Human pose
Transforms
RGB-D frame
2D-Lidar frame
Sensors
RGB-D Camera
ORBBEC Astra
2D-Lidar
HOKUYO
UST-20XL
Human_Safety_Fusion
2D-Lidar
TEB Local planner
Local costmap
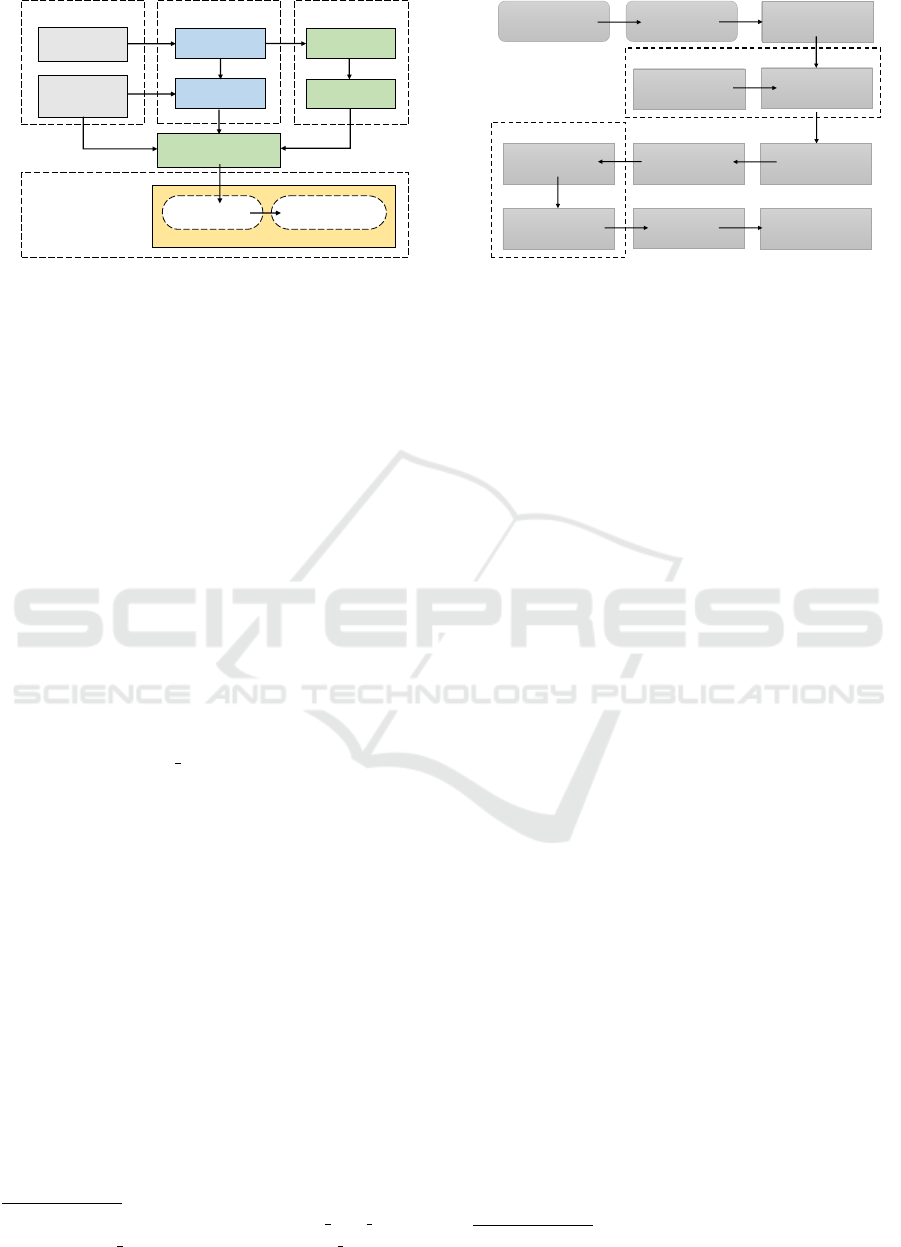
Figure 2: Conceptual overview of the system architecture
based on ROS Navigation Stack. Safety fusion is discussed
in Algorithm 1.
changed between different information sources and
manipulated by robust algorithms.
Actually, ROS Navigation Stack provides generic
autonomous navigation via path planning and SLAM
system. This allows robot to localize obstacles around
it, plan a path to avoid collision, and navigate in un-
known or partially known environments. Therefore,
online planning is needed to create a collision free
trajectory over the global trajectory toward the goal
w.r.t trajectory optimization. So that, (R
¨
osmann et al.,
2017) policies are used for on-line trajectory planning
which is based on Timed-Elastic-Band (TEB) ap-
proach. That is called teb-local planner
2
which com-
bines temporal information to reach the goal. This
method based on odometry and laser scan data re-
quires only low computational resources. Conceptual
overview of the system architecture is shown in Fig-
ure 2. based on move base
3
node in ROS Navigation
stack.
2.2 Human Detection and Localization
To localize humans, we implement depth-based hu-
man detection method using the Point Cloud Library
(PCL) and RGB-D data (Munaro et al., 2016) as il-
lustrated in Figure 3. Initially, to obtain a real time
performance, the 3D points cloud data is reduced by
voxel grid filter, where each voxel is scaled down by
threshold size close to its centroid coordinates. This
downsize operation reduces voxel size to 0.06 m of
its real size that is sufficient to perform the detection
process.
The ground plane (GP) is estimated and removed
from the obtained voxel grid. The RANSAC-based
least square method is used at each frame to com-
pute the GP equation coefficients and update it with
2
teb-local-planner, http://wiki.ros.org/teb local planner.
3
ROS move base, http://wiki.ros.org/move base.
OpenNI
RGB-D camera
current cloud
Voxel grid filter
3D bounding box
Centroid(x,y,z)
Decision
Human clusters
Remove GP
Ground Plane GP
coefficients Initialization
GP Estimation
RANSAC-based
Compute RGB confidence
RGB pre-trained
human classifier
RGB image
Clustering
neighboring 3D points
(Euclidean distances based)
Sub-Clustering
head positions
Figure 3: Block diagram describing input/output data
and the main operations performed by human localization
method.
respect of the previous frame estimation. The remain-
ing 3D points are clustered in 3D boxes based on their
Euclidean distances. Then, these 3D boxes are seg-
mented into sub-clusters to center them on peaks of a
height map which contains threshold distance of the
points from GP. These peaks are representing the hu-
man’s head positions and its 2D RGB image is repre-
senting region of interest (ROIs). Instantly, the RGB
image exhibiting ROIs is used by RGB-based human
detector to compute RGB confidence index for the ob-
tained sub-clusters. From the confidence index, we
can select true positive human detection and elimi-
nate false detection. At this stage, two methods are
investigated:
• A usual machine learning method: HOG-based
human detector with the recommended training
configurations by (Dalal and Triggs, 2005) based
on support vector machine (SVM).
• A recent deep neural network method based on
reinforcement computation implemented in CPU
or GPU: YOLO-based human detector by (Red-
mon and Farhadi, 2018) in its open source Dark-
net
4
framework with 53 convolutional layers for
features extraction.
In experiments, a pre-trained model (yolov3-tiny
based on COCO dataset) is used, which is charac-
terised by small model. Then, each human-detector
method is tested individually and the obtained results
are discussed in more details in results section. An ex-
ample for the extended code to output markers for vi-
sualization of ROIs and their RGB confidence score is
given in Figure 4. Finally, the detected humans poses
are published as ROS topic to be used further with
human safety area generation.
4
Darknet, https://pjreddie.com/darknet/
Human-aware Robot Navigation in Logistics Warehouses
373

(a) Depth image
(b) 3D boxes (c) Sub clusters
(d) RGB human detection
(e) Human localization
Figure 4: Example of output markers for visualization of
ROIs in RViz: First row depth image raw, 3D boxes for
clusters and sub-clusters, second row in RGB detection red
color rectangle for YOLO detector, green color rectangle
for HOG detector. Third row, localized human (yellow 3D
boxes).
2.3 Human Safety Area (HSA) Fusion
The navigation stack needs to know the position of
sensors, wheels, and joints in respect to robot base.
This is done using ROS Transform Frame (TF) pack-
age. The located human position coordinate is trans-
formed from RGB-D frame to 2D LIDAR sensor
frame for further human safety area calculations.
In warehouse environment, the mobile manipula-
tor needs to come close to the pallets to pick up ob-
jects on the pallets. So the parameter for the security
distance used to avoid collision between robots and
pallets is set low. In the meantime, humans must not
be scared by robots and the proxemics theory gives a
higher value for the optimal distance between robots
and humans (1.2 m). Once the distinction between
human and non-human obstacle is done, the fusion
process 2D laser plane must take this constraint into
account. The HSA is virtually inserted as an obstacle
in the warehouse environment and merge with the sig-
nal coming from the 2D lidars. This new signal and
associated occupancy grid is then used by the robot
local planner to navigate safely and human integrity
in the warehouse.
The tested 2D-LIDAR is of type Hokuyo UST-
Algorithm 1: Human Safety Fusion.
1 HumanDetector (rgb.img , depth.cloud);
2 2D Laser Scan; //scan.msg;
3 while HumanDetections(x , y , z) do
4 Calculate HSA ← (x , y , z);
5 //Generate 2D laser data message;
6 (safety.msg) ← HSA ;
7 end
8 //Async Spinner;
9 obstacle.msg ← (scan.msg , safety.msg);
20LX at a height of 0.12 m with 20 m detection range,
and 270
◦
wide detection angle [−135
◦
: 135
◦
]. The
start laser ray angle φ
◦
= −135
◦
forward along the X
axis in laser frame, alongside high angular resolution
∆ = 0.25
◦
(angle between 2 beams) with measure-
ment discrete steps (η
i
,i = [1 : 1081]) and 25 msec
high speed response. To sum up, the laser ray angle
φ
i
∈ [φ
◦
+ η
i
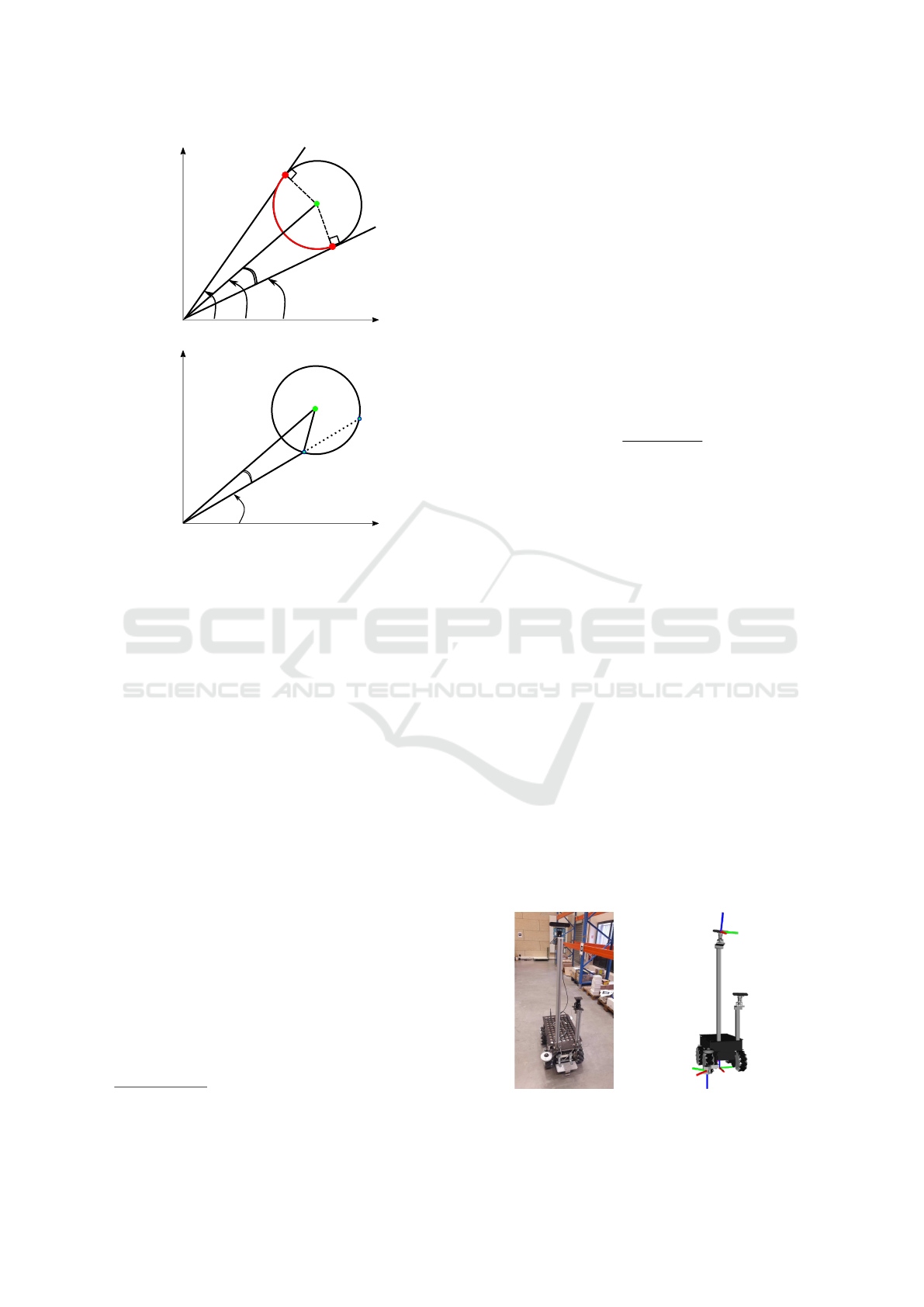
· ∆]. As shown in Figure 5a, suppose the
HSA is represented as a Virtual Safety Circle (VSC)
centroid with detected human coordinates C =
x
c
y
c
and radius r. The goal is to find all the range µ
i
and
intensity for each angle θ
i
of index i (i ∈ 1 : 1081)
which is done using the following calculations:
First, we determine the angle θ
C
, the θ
P
mini-
mum, and θ
N
maximum angles of the
_
PN arc corre-
sponding to intersection points P,N displayed on Fig-
ure 5a.
θ
c
= arctan2(x
c
,y
c
) , η
c
= E
"
θ
c
− φ
0
∆
#
(1)
θ
P
= min(θ
c
+ ψ,θ
c
− ψ) , η
P
= E
"
θ
P
− φ
◦
∆
#
(2)
θ
N
= max(θ
c
+ ψ,θ
c
− ψ) , η
N
= E
"
θ
N
− φ
◦
∆
#
(3)
where ψ = arccos(r/d). Let ω
i
= θ
C
− θ
i
and µ
i
, θ
i
respectively the range and angle associated with Q
i
(see Figure 5b). Applying Al Kashi theorem in trian-
gle LQ
i
C:
r
2
= µ
2
i
+ d
2
− 2d · µ
i
· cos(ω
i
) (4)
The resolution of this quadratic equation leads to two
solutions and the minimum is chosen to be µ
i
. Thus,
Q
i
= µ
i
h
cosθ
i
sinθ
i
i
(5)
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
374
d
C
r
N
P
X
Y
θ
N
θ
P
θ
C
ψ
μ
L
(a)
d
C
r
X
Y
θ
i
μ
i
L
Q
i
ω
i
(b)
Figure 5: Calculations of the arc HSA in 2D-LIDAR coor-
dinates system.
The Async Spinner
5
is utilized to merge the gen-
erated circular obstacles to 2D LIDAR sensor as de-
scribed in human safety fusion algorithm 1. Whereas,
a delayed message is controlled in custom time stamp
queue and empty message is eliminated to keep track
to the detected obstacles.
3 EXPERIMENTS AND RESULTS
The performance and capabilities of the proposed sys-
tem are tested using a PC with Intel Core i7-6700HQ
CPU 2.60 GHz, 32 GB of RAM and Nvidia Quadro
GPU M3000M with 4 GB of memory and 1024
CUDA cores under Ubuntu 16.04 (Xenial) with ROS
Kinetic. Several experiments are designed to rein-
force the demands invoked in the introduction. First,
human detection is investigated and evaluated, then
the evaluation of the safety navigation approach is fo-
cused on avoiding obstacles. Testing the navigation
system is carried out in logistic warehouse simula-
tion environment using Summit XL mobile robot with
Orbbec Astra RGB-D camera mounted on top of the
robot at 1.63 m and with Hokuyo laser range finder at
0.12 m from ground plane as given in Figure 6.
5
Async Spinner, http://wiki.ros.org/roscpp/Overview/
Callbacks and Spinning
3.1 Human Detection Evaluation
Detection-based metrics (Goutte and Gaussier, 2005)
are utilized for evaluating human detectors. These
metrics include Accuracy, Precision, Recall, F1-
Measure and FP-Rate which are depending on the
number of correctly detected (True Positive: TP),
falsely detected (False Positive: FP), missed detected
objects (False Negative: FN) and true rejected object
(True Negative: TN). The following performance in-
dices are considered :
• Precision of predictions = T P/(T P + FP)
• Recall = T P/(T P + FN)
• Accuracy = ((T P+T N)/(T P +T N +FP +FN))
• F1-Measure = 2 ×
precision×recall
precision+recall
• FP-Rate = FP/(FP + T N)
For human detection in 2D laser range data, we
compare between different trained classifiers on laser
features described in (Linder et al., 2016) using three
supervised learning techniques: Adaboost, SVM and
the random forest (with 15 trees and maximum depth
of 10). Comparatively to the recorded results for
human detection which addressed a highly perfor-
mance in (Linder et al., 2016) due airport environment
dataset given in Table 1. Different from the reported
result of the same pre-trained human classifiers in lo-
gistics environment. Unfortunately, human detection
by 2D laser range data is ruled out, where it scores
high false alarms and missed detection in respect to
the appearance similarity between human leg features
and logistics warehouse equipment such as selective
racks and pallets at ground plane. 2D-LIDAR fea-
tures sample for false alarm and missed detection re-
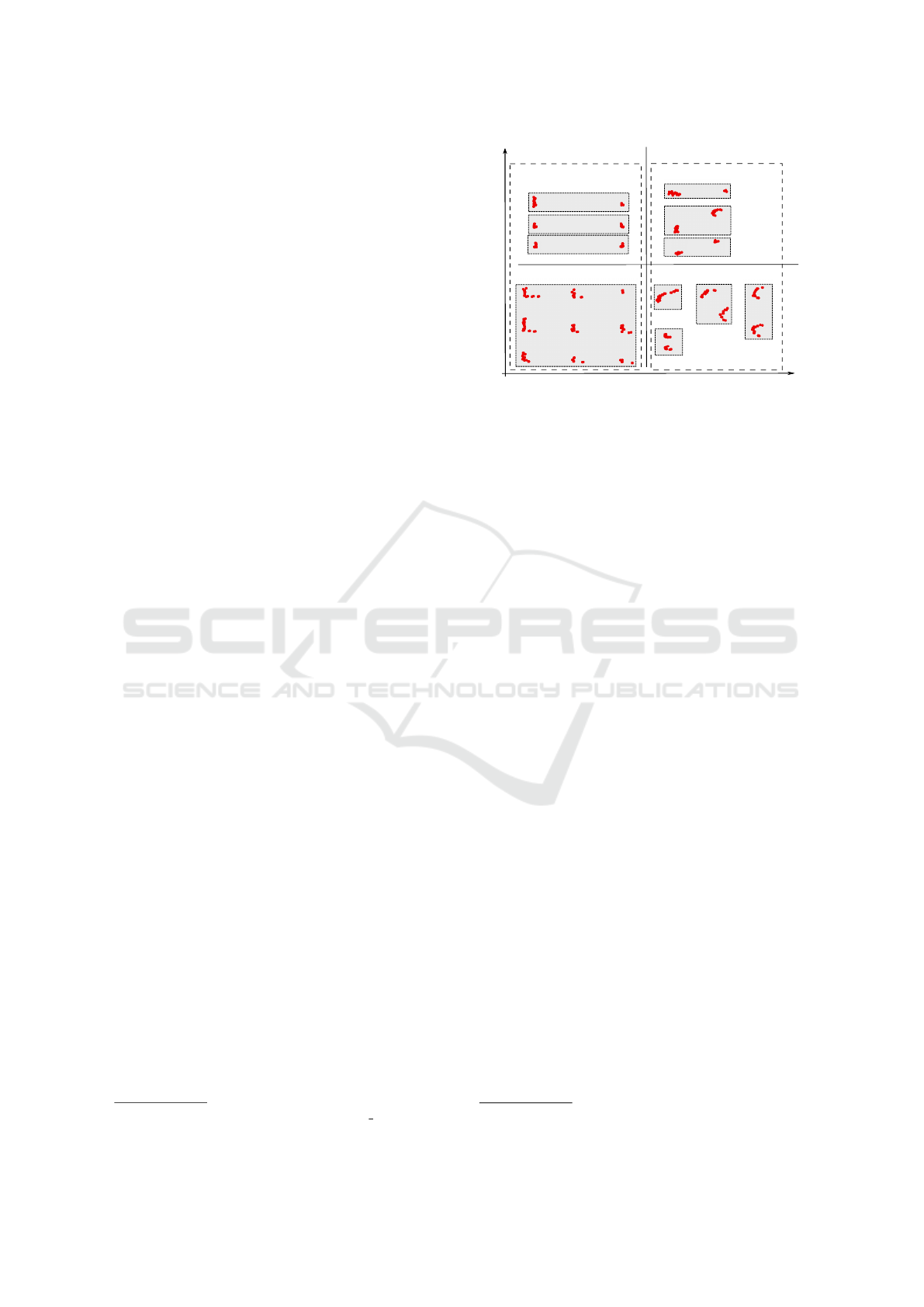
sults are shown in Figure 7. In details, false alarms by
euro pallet are formatted with a 2D laser features most
similarly to the human leg features when coworker
is in standing state; where both of them are approxi-
mately sharing some features (Circularity, Radius and
number of reflected points). Additionally, when the
Hokuyo
Orbbec Astra RGB-D
2D Lidar
Figure 6: Summit XL robot and its URDF model with TF
in RViz.
Human-aware Robot Navigation in Logistics Warehouses
375
jump distance value for 2D laser data segmentation
is chosen with high value to ignore the false alarms
by the selective racks, a highly score of missed detec-
tion is found for the coworker in walking state. Under
those circumstances, severity rate of human damage
is increased. The performance evaluation of 2D laser-
based human detector in logistics warehouses simula-
tion is shown in Table 2. Each single experiment is
run at least 3 times and detection metrics have been
averaged to ensure stable results for each classifier.
For evaluating the performance of human detec-
tor in RGB-D data, the classical supervision machine
learning technique are compared with deep learning
in two computation scenarios: the first scenario uses
CPU computation only, the second scenario uses CPU
and GPU computation. Due the classical supervision
machine learning technique, a pre-trained HOG de-
scriptor is used for human with svm classifier. On the
other hand, a pre-trained model (yolov3-tiny) is used
based on COCO dataset. Nevertheless, both HOG-
based and YOLO-based detectors achieve high detec-
tion rates as reported in Table 3.
The YOLO-based detector scores very slow de-
tection time 1.961 (sec) per frame under CPU calcu-
lations only. Conversely, it is run in real time only
by GPU computation with 53 Hz, very fast detection
time 0.008 (sec) per frame and scores less FP-Rate
0.018. While, the HOG-based human detector is run
in real time at 18 Hz on CPU with average detection
time 0.039 (sec) per frame and score a few FP-rate
0.154, also the HOG detector based on CUDA im-
plementation is run at 34 Hz and fast detection time
0.021 (sec) per frame. Under these circumstances,
non-expensive GPU is useful to obtain high speed hu-
man perception, but, when mobile robot platform is
not equipped with GPU, the HOG-based human per-
ception is adequate in real time.
3.2 Navigation Simulation
Logistics warehouse environment simulation is de-
signed under Gazebo simulator where standard par-
allel racks are set up at 3.0 m distances of each other.
For mapping and simulation experiments, we have
created a map by ROS Hector
6
SLAM (Kohlbrecher
et al., 2011) with two costmaps configurations: global
costmap and local costmap. In the local costmap, a
8×8 rolling window covers 4 m around mobile robot
and 0.05 m inflation radius for obstacles in inflation
layer. Besides, local trajectory planning parameters
are tuned with optimal parameters allowing the robot
to maneuver in narrow aisles and let human workers
6
Hector SLAM, http://wiki.ros.org/hector slam
warehouse equipment
human leg
walking
standing
(multi-poses)
racks
pallet
true detection
missed detection
false positive
Jump distance parameter
Severity rate of human damage
no human detection
human detection
true negative
Figure 7: 2D LIDAR features samples for logistics ware-
house equipment and human leg with strip rectangle for
each object, first column is for logistics warehouse equip-
ment (selective racks, euro pallet), while second column is
for human leg (walking and standing states).
pass through. Then, the proposed method is tested us-
ing 2D navigation goal tool in RViz with avoiding ob-
stacles using laser human safety fusion messages (see
Figure 8). Figure 9 shows how the mobile robot avoid
standing and walking coworkers using the proposed
HSA around their localization in logistics warehouses
simulation
7
.
4 CONCLUSIONS
In this paper, we study a difficult problem namely hu-
man aware navigation in warehouses where research
results for human detection do not give the expected
good results. To overcome this problem, we proposed
a new strategy based on a 2-steps method: the first
step is to use the depth signal for clustering and identi-
fying 3D boxes likely to be humans; while, the second
step is to compute a human presence confidence index
from the RGB signal. For the second step, several
methods are compared and found solutions able to be
run in real time on CPU with the HOG based method
or on GPU with deep learning methods. The choice
of the second step method depends on the available
resources, but at least in the cheapest configuration,
one method can solve the problem. The last contribu-
tion consists of fusing the data coming from the hu-
man detection algorithm and the 2D laser signal to
create a 2D map enabling the robot to navigate not
only safely but also human friendly, i.e., taking into
account the proxemics theory optimal distances be-
tween robots and humans. The experiments in the
simulation environment proved that the method can
improve greatly the robot behaviors when crossing
7
Video, https://vimeo.com/325696517
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
376

Table 1: Quantitative results for human detection in the 2D laser range data (Linder et al., 2016).
Method Accuracy Precision Recall F1-Measure FP-Rate
SVM 0.914 0.741 0.615 0.672 0.031
Adaboost 0.969 0.895 0.846 0.870 0.014
Random Forest 0.962 0.906 0.766 0.830 0.011
Table 2: Quantitative results for human detection in the 2D laser range data in warehouse simulated environment.
Method Accuracy Precision Recall F1-Measure FP-Rate
SVM 0.310 0.221 0.249 0.235 0.636
Adaboost 0.440 0.285 0.497 0.363 0.588
Random Forest 0.291 0.214 0.331 0.260 0.733
Table 3: Quantitative results for human detection by RGB-D data in warehouse simulated environment.
Method GPU detection time (sec) Hz Accuracy Precision Recall F1-Measure FP-Rate
HOG Off 0.039 18.82 0.718 0.664 0.619 0.640 0.154
HOG On 0.021 34.57 0.741 0.761 0.672 0.713 0.136
YOLO Off 1.961 5.29 0.966 0.906 0.813 0.856 0.021
YOLO On 0.008 53.80 0.974 0.912 0.830 0.869 0.018
(a) 3D box visualization (b) 2D laser fusion (c) Local costmap visualization
Figure 8: Visualisations of 2D laser fusion and local costmap outputs using RViz for logistics warehouse simulation.
human coworker in logistics warehouses. In future,
the proposed framework will be tested on real robot
platform follow through compress human localization
using deep neural network models for reducing mem-
ory and computational requirements and allowing al-
gorithm implementation on the CPU only.
ACKNOWLEDGEMENTS
This research is supported and funded by ERDF
XTERM project action 5: Factory of the future. Grant
HN-002106.
REFERENCES
Arras, K. O., Mozos, O. M., and Burgard, W. (2007). Us-
ing boosted features for the detection of people in
2d range data. In IEEE International Conference on
Robotics and Automation, pages 3402–3407. IEEE.
Choi, S., Kim, E., Lee, K., and Oh, S. (2017). Real-time
nonparametric reactive navigation of mobile robots
in dynamic environments. Robotics and Autonomous
Systems, 91:11–24.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In IEEE International
Conference on Computer Vision & Pattern Recogni-
tion, volume 1, pages 886–893. IEEE.
Goutte, C. and Gaussier, E. (2005). A probabilistic interpre-
tation of precision, recall and f-score, with implication
for evaluation. In European Conference on Informa-
tion Retrieval, pages 345–359. Springer.
Kohlbrecher, S., Von Stryk, O., Meyer, J., and Klingauf, U.
(2011). A flexible and scalable slam system with full
3d motion estimation. In IEEE International Sympo-
sium on Safety, Security, and Rescue Robotics, pages
155–160. IEEE.
Krajn
´
ık, T., Cristoforis, P., Kusumam, K., Neubert, P., and
Duckett, T. (2017). Image features for visual teach and
repeat navigation in changing environments. Robotics
and Autonomous Systems, 88:127–141.
Linder, T., Breuers, S., Leibe, B., and Arras, K. O. (2016).
On multi-modal people tracking from mobile plat-
forms in very crowded and dynamic environments. In
Human-aware Robot Navigation in Logistics Warehouses
377

(a) Green arrow for target (f/t=0s) (b) Localize human safety (f/t=5s) (c) Wait human to pass (f/t=10s)
(d) Change local plan (f/t=20s) (e) Keep safety crossing (f/t=25s) (f) Reach to target (f/t=45s)
Figure 9: Snap-shots of visualisations for robot navigation in simulation experiment using RViz (local planner: blue line,
global planner: green line, human safety: green circle (1.2 m radius), local costmap: light gray).
IEEE International Conference on Robotics and Au-
tomation, pages 5512–5519. IEEE.
Linder, T., Griesser, D., Vaskevicius, N., and Arras, K. O.
(2018). Towards accurate 3D person detection and
localization from RGB-D in cluttered environments.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), Workshop on Robotics
for Logistics in Warehouses and Environments Shared
with Humans.
Lindner, F. and Eschenbach, C. (2017). An affordance-
based conceptual framework for spatial behavior of
social robots. In Sociality and Normativity for Robots,
pages 137–158. Springer.
Malone, N., Chiang, H.-T., Lesser, K., Oishi, M., and Tapia,
L. (2017). Hybrid dynamic moving obstacle avoid-
ance using a stochastic reachable set based potential
field. IEEE Transactions on Robotics, 33(5):1124–
1138.
Munaro, M., Lewis, C., Chambers, D., Hvass, P., and
Menegatti, E. (2016). RGB-D human detection
and tracking for industrial environments. In Intel-
ligent Autonomous Systems (IAS-13), pages 1655–
1668. Springer.
Nardi, L. and Stachniss, C. (2017). User preferred behaviors
for robot navigation exploiting previous experiences.
Robotics and Autonomous Systems, 97:204–216.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). ROS: An
open-source robot operating system. In ICRA Work-
shop on open source software.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
R
¨
osmann, C., Hoffmann, F., and Bertram, T. (2017). Inte-
grated online trajectory planning and optimization in
distinctive topologies. Robotics and Autonomous Sys-
tems, 88:142–153.
Song, K.-T., Jiang, S.-Y., and Wu, S.-Y. (2017). Safe guid-
ance for a walking-assistant robot using gait estima-
tion and obstacle avoidance. IEEE/ASME Transac-
tions on Mechatronics, 22(5):2070–2078.
Wahrmann, D., Hildebrandt, A.-C., Schuetz, C., Wittmann,
R., and Rixen, D. (2017). An autonomous and flexible
robotic framework for logistics applications. Journal
of Intelligent & Robotic Systems, 93:419–431.
Yang, H., Fan, X., Shi, P., and Hua, C. (2016). Nonlin-
ear control for tracking and obstacle avoidance of a
wheeled mobile robot with nonholonomic constraint.
IEEE Transactions on Control Systems Technology,
24(2):741–746.
Zimmermann, C., Welschehold, T., Dornhege, C., Burgard,
W., and Brox, T. (2018). 3D human pose estimation
in RGBD images for robotic task learning. In IEEE
International Conference on Robotics and Automation
(ICRA), pages 1986–1992. IEEE.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
378
