
A Modular Underactuated Gripper with Force Control System
A. Margun, D. Bazylev, K. Zimenko and A. Kremlev
Faculty of Control Systems and Robotics, ITMO University, 49 Kronverkskiy av., 197101 Saint Petersburg, Russia
Keywords:
Underactuated Gripper, Force Sensitive System, Force Control, Passive System, Modularity.
Abstract:
A design of an underactuated electromechanical gripper with force control algorithm is presented in this paper.
The key feature of the gripper is the ability to grasp fragile objects and objects of a complex shape. Such
advantages are due to the usage of elastic joints and force sensitive resistors embedded in modules of gripper’s
fingers. Also low cost and mass of the presented device makes its application rational for a larger number
of robotic systems. Proposed force control system is based on PI control and passification approaches that
provide tuning simplicity and good performance in the case of unknown environments. Experimental results
show the efficiency of proposed solution.
1 INTRODUCTION
Development of cheap and mobile mechatronic com-
plexes equipped with a grasping devices is an ac-
tively increasing area of robotics. Creation of univer-
sal grippers for mobile robots operating in unknown
environment is an particular task (Bicchi, 2000; Choi
et al., 2017; Ma et al., 2013).
Grasping devices for mobile robots should satisfy
following conditions:
• low mass and dimensions;
• ability to grasp objects with unknown complex
shape;
• ability of force interaction control;
• low cost and modular structure;
• low energy consumption, etc.
Low mass and energy consumption allow to in-
stall gripper on mobile robots with limited charge of
battery. Low cost and modularity of the structure are
preffered due to practical and financial reasons. In
particular, the modular design significantly improves
the maintainability of the device and its post-warranty
service. On the other hand, a simpler construction
usually ensures a higher reliability of technical sys-
tems (Telegenov et al., 2015).
Interaction with unknown environment may in-
clude accurate grasping for fragile objects and fast re-
action in the case of active environment for damage
prevention. There are three ways to solve this prob-
lem: use of tacticle sensors (as, for example, in Tegin
and Wikander, 2005), adaptive (Bazylev et al., 2015)
and robust (Margun et al., 2014) control laws, use of
underactuated and compliant devices.
One can categorize grasping devices with three
classes: mechanical, vacuum and magnetic. Mag-
netic grippers operate only with ferromagnetic ob-
jects. Therefore, further we do not consider this class.
Vacuum grippers provide grasping of only objects
with special form and structure. So we can not use
them in unknown environment.
There are following classes of mechanical grip-
pers: hydraulic, pneumatic and electric. Hydraulic
grippers can apply the largest strength among all
classes but provide low velocity, require massive
pumps and a lot of energy (Lane et al., 1999). Pneu-
matic grippers are popular due to their light weight
and compact size. The need of use compressors and
impossibility of force and position precise control
(usually only ”bang-bang” control is available) are
main disadvantages of this type. Grippers with elec-
tric motors do not require compressed air or liquid
and provide position and force control. Comparison
of different gripper types is in Table 1.
There are a lot of mechanical schemes for electric
grippers which allow to grasp objects with complex
shape. Some solutions are based on the use of elastic
joints (see Camillo, 2014; Chen and Lin, 2004; Ma
and Dollar, 2014; Ma et al., 2013; Zhang et al., 2018,
etc). Simplicity of manufacture, modularity and low
cost are the main reasons for the increased interest in
such devices. However, the lack of force sensitivity
prevents the use of these grippers in tasks that require
Margun, A., Bazylev, D., Zimenko, K. and Kremlev, A.
A Modular Underactuated Gripper with Force Control System.
DOI: 10.5220/0007923904170422
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 417-422
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
417
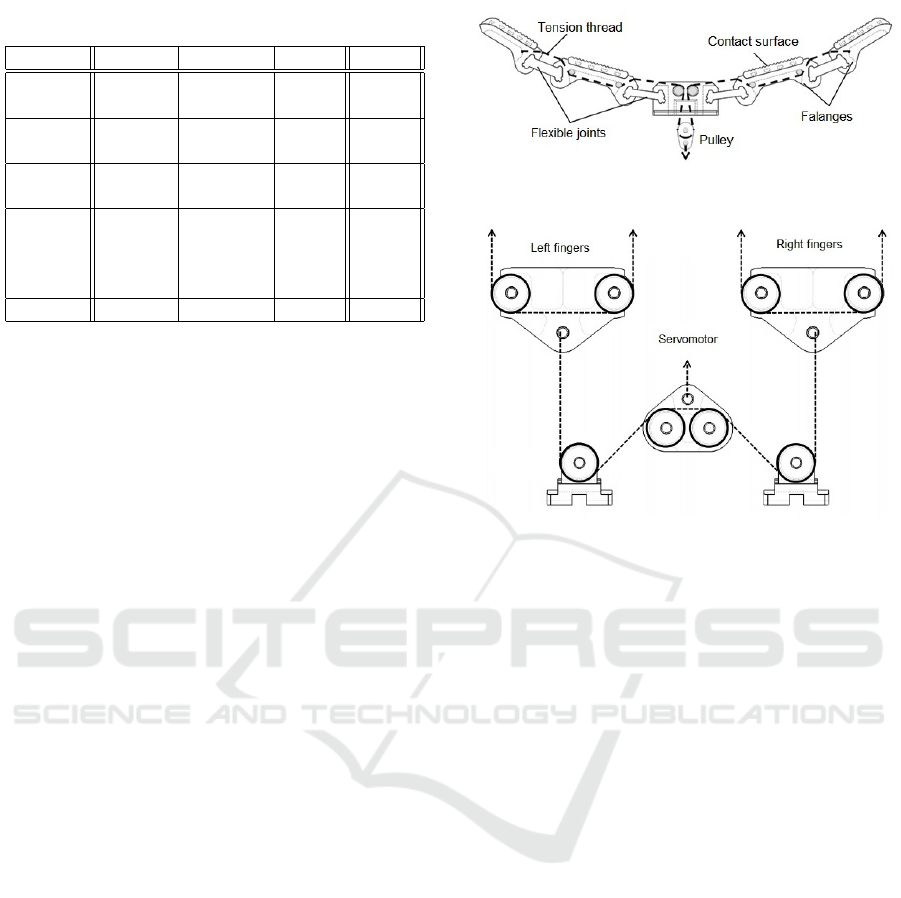
Table 1: Comparison of gripper types.
Hydraulic Pneumatics Vacuum Electric
Grasping
force
High Low High Middle
Complex
shape
No No No Possible
Force
control
Possible Possible No Yes
Mass
and
dimen-
sions
High Middle Middle Low
Price High Low Middle Middle
precise grasping. In such cases expensive devices
with multiple degrees of freedom (see, for example,
Andersen et al., 2017; Camillo, 2014) or complex un-
deractuated mechanics (as in Camillo, 2014) are used.
The use of force sensitive systems on devices, as in
Ma et al. (2013) and Ma and Dollar (2014), as a rule,
leads to a significant complexity of the structure and
loss of modularity. Thus, there is the development
problem of devices with elastic joints preserving its
benefits (simplicity, modularity, cost price) that have
a force sensitive system. Since such systems are un-
deractuated, a particular task is the synthesis of force
control algorithms for precise grasping.
The goal of our project is to develop cheap and
easy for production gripper with low mass, force con-
trol and possibility to interact with active environ-
ment. The paper organized as follows. Section 2 is
devoted to the mechanical construction. Element base
is in Section 3. Control algorithm and experimental
results are provided in Sections 4 and 5. Finally, con-
cluding results are given in Section 6.
2 GRIPPER CONSTRUCTION
Low mass-dimensional parameters, cost, modularity
and possibility of force control are main parameters
for our goal.
YaleOpenHand gripper with four fingers (Ma and
Dollar, 2014; Ma et al., 2013) is chosen as a proto-
type for our device. The model of a differentially
controlled pair of gripper fingers is presented in Fig.
1. Contraction-relaxation of fingers carried out due to
the winding (unwinding) tension thread on the pul-
ley by actuator in the gripper body. Simultaneous
movement of fingers is provided by block system of
the tendons (Fig.2) and only one servomotor. Flex-
ible joints and phalangeal contact surfaces are made
of polyurethane.
Object grasping is provided with the use of block
Figure 1: Differentially controlled pair of gripper fingers.
Figure 2: Block system.
system by movement of main roller fixed on the ser-
vodrive shaft. High-strength thread is used as the ten-
dons. Grasping is carried out as follows:
• servodrive rotates the shaft;
• main roller on the shaft winds the thread;
• main block moves up;
• finger blocks moves down;
• move of blocks moves the fingers.
The construction was sufficiently reworked for
force sensitivity implementation with save of func-
tionality and modularity. First task caused by special
arrangement of sensors that measure force of inter-
action. Sensors should be located directly under the
contact surface in each phalanx of the fingers. Second
task includes laying of wires, sensors connection with
controller, preservation of device modularity.
Force sensitive system in each phalanx is per-
formed in the form of removable modules to solve
described problems. The information bus, through
which data is exchanged with each module, is in-
stalled along the finger from the side opposite to the
contact surface. Such solution eliminates the possi-
ble rubbing of wires during operation of the gripper.
Sensor modular structure is in Fig. 3. A plate with a
contact surface attached to it is inserted into the cav-
ity above the force interaction sensor. This module is
inserted into the cavity in each phalanx of the finger.
Thus, in the case fingers are in contact with an obsta-
cle (object of operation) all modules embedded in the
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
418
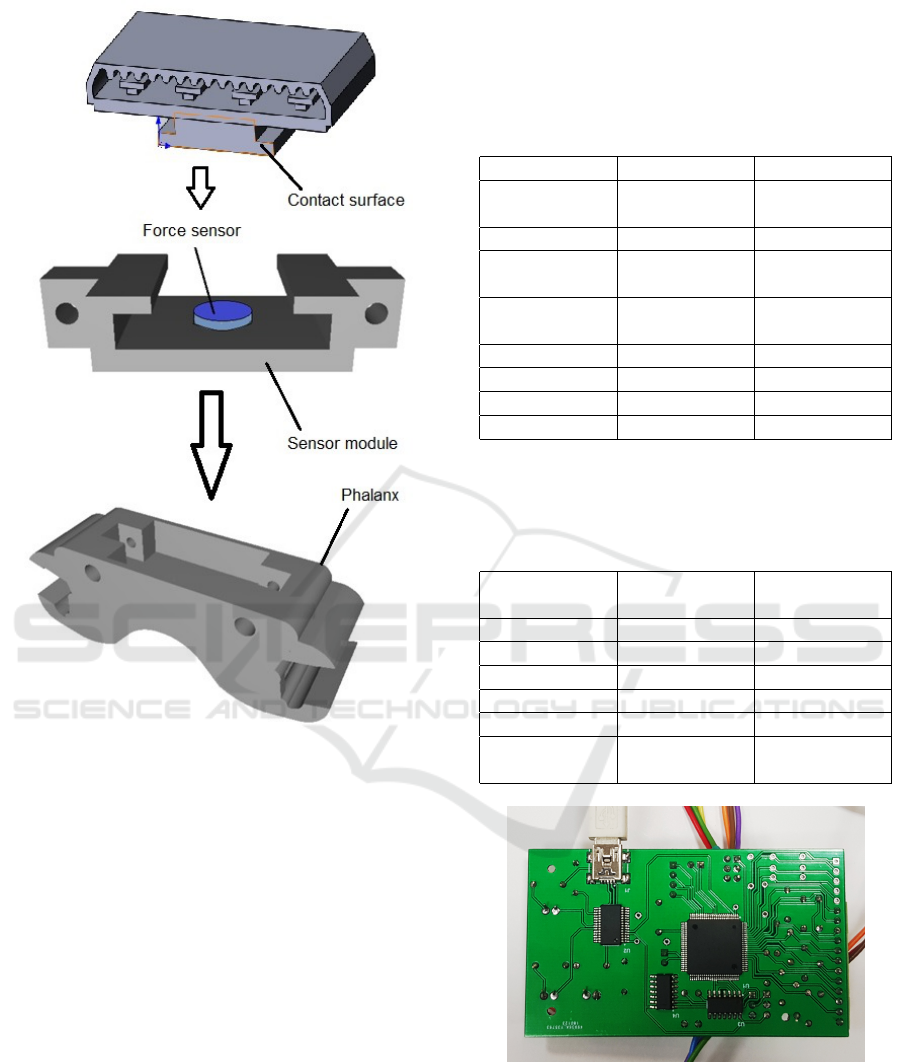
Figure 3: Sensor modular structure.
phalanges send force interaction data to the controller
via information bus. It should be noted, developed
structure allows simple change of sensor module and
its connection to information bus (there is no need to
disassemble all construction, replace full finger, etc.).
3 ELEMENT BASE
All mechanic details of gripper are made by 3D print-
ing with FDM technology. The use of plastic suf-
ficiently reduces mass of the gripper. 3D printing
greatly simplifies manufacture process.
Elastic joint are made with casting of
polyurethane. To prevent slippage and increase
adhesion with the object of capture, the surface
of the fingertips and phalanges are covered with a
layer of more rigid polyurethane. Forms for casting
were made by 3D printing. Polyurethane is widely
used in industry due to the wide range of operating
temperatures (from -60
◦
C to + 80
◦
C) and the
ability to work in conditions of large alternating
loads.
Servomotor Dynamixel MX-64 is chosen as grip-
per actuator. Its characteristics are in Table 2.
Table 2: Dynamixel MX-64 parameters.
Mass g 126
Dimensions mm 40.2 x 61.1 x
41
Gear – 200:1
Interface – TTL half du-
plex
Encoder – 360
◦
/4096
(absolute)
Voltage V 12
Torque N · m 6
Current A 4.1
Velocity tpm 63
Force is measured via force sensitive resistors
FSR-400 connected in resistive divider scheme. Its
parameters are shown in Table 3.
Table 3: FSR-400 parameters.
Actuation
force
N 0.2
Sensitivity N 0.2-20
Resolution – Analog
Repeatability % ± 2
Rise time us ¡3
Tap durability – 10 millions
Temperature
range
◦
C -40 – +85
Figure 4: Electronic board.
Developed electronic board for the gripper is
shown in Fig. 4. The board is based on microcon-
troller ATmega 2560 and provides connection with
external devices by common interfaces (USB, I2C,
SPI, UART), reading sensors data (up to 16 sen-
sors), data processing, communication with servomo-
tor, calculation of control algorithm.
A Modular Underactuated Gripper with Force Control System
419
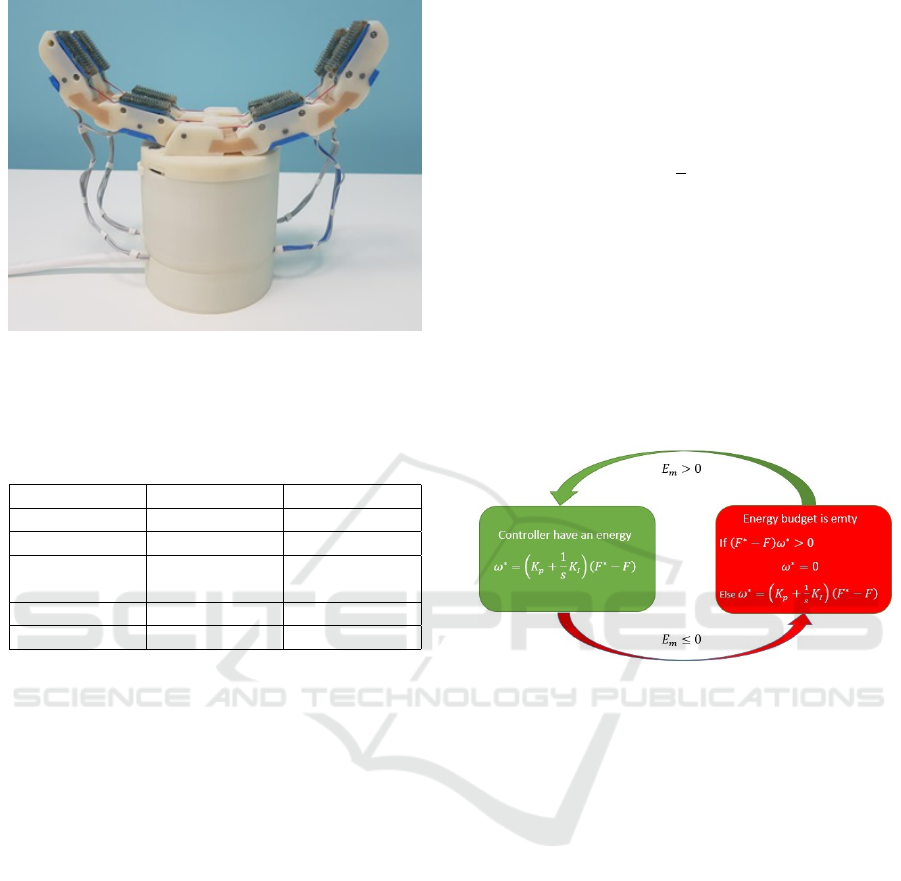
Figure 5: General view of the gripper.
Assembled gripper is illustrated in Fig. 5. Ob-
tained gripper parameters are shown in Table 4.
Table 4: Gripper parameters.
Sizes mm 223x100.5x192
Mass kg 0.724
Voltage V 12
Maximum
power
Wt 36
Grasping time s 1.122
Force range N 0.5 – 7.5
4 CONTROL ALGORITHM
The goal of control algorithm is to provide desired
contact force between surface of gripper fingers and
grasping object. It is proposed to use the passifi-
cation based method to ensure effective regulation
(Groothuis et al., 2018). The control algorithm is de-
signed in such a way that the energy of the plant is
limited and, as follows, the plant is not unstable. In
our case servomotor is an actuator of the gripper and
fingers are the plant.
Consider energy transmitted to the plant for the
period (t
0
;t
1
):
∆E =
Z
t
1
t
0
τ(t)ω(t)dt =
Z
t
1
t
0
k
m
i(t)ω(t)dt, (1)
where τ(t) is a momentum on the shaft of servomo-
tor, ω(t) is an angular velocity of the shaft, k
m
is a
constant, i(t) is a servomotor current.
Because of servomotor is a discrete system con-
trolled by pulse-width modulation with small sam-
pling time we have that i(t) is a constant for (t
0
;t
1
),
where (t
0
;t
1
) is a sampling time. Then
∆E = k
m
i(t
0
)
Z
t
1
t
0
ω(t)dt = k
m
i(t
0
)(q(t
1
) − q(t
0
)),
(2)
where q is a rotation angle of the shaft.
Introduce a PI speed controller to control the force
of interaction with the grasping object
ω
∗
=
k
p
+
1
s
k
i
(F
∗
− F), (3)
where ω
∗
is a desired servomotor angular velocity, k
p
and k
i
are positive controller parameters, s is a differ-
ential operator, F
∗
is a desired force of interaction, F
is a force of interaction.
PI controller includes an integrator. This may lead
to unlimited energy transmitting in the case of un-
known active environment and consequently to plant
instability. To overcome this drawback we limit the
amount of energy that the controller can transmit to
the plant with finite state machine (Fig. 6).
Figure 6: Finite state machine.
Let the controller has energy budget E
m
. Then we
have:
• in the case of energy transfer from controller to
plant (ω
∗
(F
∗
−F) > 0) and energy budget is non-
empty E
m
> 0 then calculated control signal ω
∗
increases plant energy and the energy budget is
reduced;
• if plant energy is reduced (ω
∗
(F
∗
− F) ≤ 0) then
we increase the energy budget by ∆E.
• if (ω
∗
(F
∗
− F) > 0) but energy budget is empty
E
m
< 0 then ω
∗
= 0.
Schematically the proposed control algorithm is
illustrated in Fig. 7.
Proposed algorithm includes advantages of PI
controller (simple tuning and implementation) and
advantages of passivity based approaches (passivity
of closed-loop system, good performance in the case
of unknown environments).
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
420
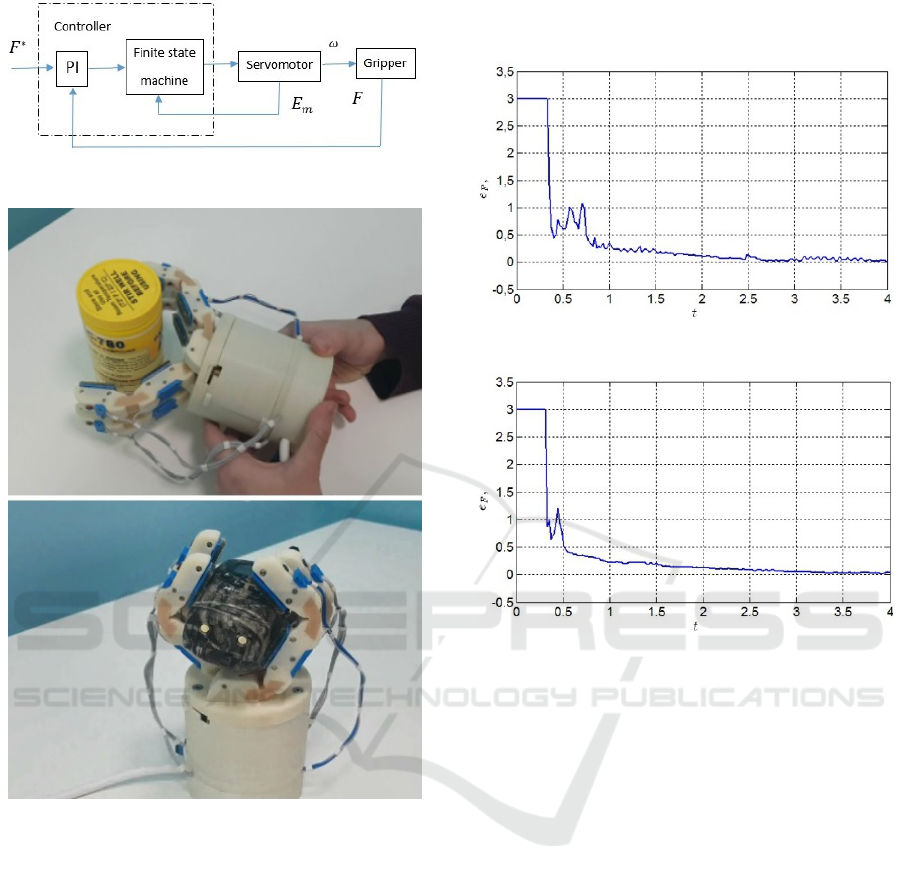
Figure 7: Control algorithm scheme.
Figure 8: Experiments.
5 EXPERIMENTAL RESULTS
Experimental research was conducted for the de-
signed gripper. The task of experiments is to verify
the grasping ability of the objects with different ge-
ometrical shape. For this purpose we used a cylin-
drical object (plastic can) and a complex shape object
(walkie talkie) (Fig. 8). The control goal is gripping
and withholding the object with a predetermined de-
sired force.
Experiment parameters are chosen as follows:
F
∗
= 3N, sampling time is 0.01s , k
p
= 80, k
I
= 1, 1,
k
m
= 0.0075, E
m
= 0.1J. Experimental error tran-
sients are shown in Fig. 9–10 for the plastic can and
walkie talkie, respectively.
Experimental results show that proposed control
algorithm provides convergence of interaction force
to the desired value.
Figure 9: Transients of the force error for cylindrical object.
Figure 10: Transients of the force error for complex shape
object.
6 CONCLUSIONS
Cheap and easy for manufacturing gripper is pre-
sented in the paper. Proposed construction allows to
move four fingers of gripper with only one servomo-
tor. Gripper allows to work in unknown environment
and external disturbances due to use of elastic joints.
Designed device is equipped with force sensitive sys-
tem based on force sensitive resistors embedded in
finger modules. Electronic board is based on ATmega
2560 microcontroller and provide the common inter-
faces for integration into various robotic applications.
The proposed control algorithm is based on PI and
passification approaches. Experimental results show
good performance of presented solution.
ACKNOWLEDGEMENTS
This work was financially supported by Goverment of
Russian Federation (Grant 08-08).
A Modular Underactuated Gripper with Force Control System
421

REFERENCES
Andersen, R., Hansen, E., Cerny, D., Madsen, S., Pulen-
dralingam, B., S.Bogh, and Chrysostomou, D. (2017).
Integration of a skill-based collaborative mobile robot
in a smart cyber-physical environment. Procedia
Manufacturing, 11:114–123.
Bazylev, D., Kremlev, A., Margun, A., and Zimenko, K.
(2015). Design of control system for a four-rotor
uav equipped with robotic arm. 7th International
Congress on Ultra Modern Telecommunications and
Control Systems and Workshops, pages 144 – 149.
Bicchi, A. (2000). Hands for dexterous manipulation
and robust grasping: a difficult road toward simplic-
ity. IEEE Transactions on Robotics and Automation,
16(6):652–662.
Camillo, J. (2014). What’s new with robot end-effectors.
Assembly, 57(12).
Chen, W. and Lin, W. (2004). Design of a flexure-based
gripper used in optical fiber handling. IEEE Con-
ference on Robotics, Automation and Mechatronics,
pages 83–88.
Choi, M.-S., Lee, D.-H., Park, H., Kim, Y.-J., Jang, G.-R.,
Shin, Y.-D., Park, J.-H., Baeg, M.-H., and Bae, J.-H.
(2017). Development of multi-purpose universal grip-
per. 56th Annual Conference of the Society of Instru-
ment and Control Engineers of Japan (SICE).
Groothuis, S., Folkertsma, G., and Stramigioli, S. (2018).
A general approach to achieving stability and safe be-
havior in distributed robotic architectures. Frontiers
Robotics AI, 5:1–15.
Lane, D., Davies, J., Robinson, G., O’Brien, D., Sneddon,
J., Seaton, E., and Elfstrom, A. (1999). The amadeus
dextrous subsea hand: Design, modeling, and sensor
processing. IEEE Journal of Oceanic Engineering,
24(1):96–111.
Ma, R. and Dollar, A. (2014). An underactuated hand
for efficient finger-gaiting-based dexterous manipula-
tion. IEEE International Conference on Robotics and
Biomimetics, pages 2214–2219.
Ma, R., Odhner, L., and Dollar, A. (2013). A modular,
open-source 3d printed underactuated hand. IEEE In-
ternational Conference on Robotics and Automation,
pages 2722–2728.
Margun, A., Zimenko, K., Bazylev, D., Bobtsov, A., and
Kremlev, A. (2014). Application of ’consecutive com-
pensator’ method for robotic manipulator control. 6th
International Congress on Ultra Modern Telecommu-
nications and Control Systems and Workshops, pages
341 – 345.
Tegin, J. and Wikander, J. (2005). Tactile sensing in intelli-
gent robotic manipulation - a review. Industrial Robot,
32(1):64–70.
Telegenov, K., Tlegenov, Y., and Shintemirov, A. (2015). A
low-cost open-source 3-d-printed three-finger gripper
platform for research and educational purposes. IEEE
Access, 3:638–647.
Zhang, H., Kumar, A., Fuh, J., and M.Y.Wang (2018).
Design and development of a topology-optimized
three-dimensional printed soft gripper. Soft Robotics,
5(5):650–661.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
422
