
An Unsupervised Drift Detector for Online Imbalanced Evolving
Streams
D. Himaja
1
, T. Maruthi Padmaja
1
and P. Radha Krishna
2
1
Department of Computer Science and Engineering, Vignan’s Foundation for Science, Technology and Research (Deemed
to be University), Guntur-Tenali Rd, Vadlamudi, Guntur, Andhra Pradesh, India
2
Department of Computer Science and Engineering, National Institute of Technology, Warangal, Telangana, India
Keywords: Class Imbalance, Evolving Stream, Concept Drift, Active Learning, Hypothesis Tests.
Abstract: Detecting concept drift from an imbalanced evolving stream is challenging task. At high degree of
imbalance ratios, the poor or nil performance estimates of the learner from minority class tends to drift
detection failures. To ameliorate this problem, we propose a new drift detection and adaption framework.
Proposed drift detection mechanism is carried out in two phases includes unsupervised and supervised drift
detection with queried labels. The adaption framework is based on the batch wise active learning.
Comparative results on four synthetic and one real world balanced and imbalanced evolving streams with
other prominent drift detection methods indicates that our approach is better in detecting the drift with low
false positive rates.
1 INTRODUCTION
Recently, learning from imbalanced data streams is
receiving much attention. This is a combined
problem of Online Class Imbalance and Concept
Drift according to (Ditzler et al, 2015 and Gama et
al, 2013) and can usually find in Fraud and Fault
detection domains. The class imbalance problem
occurs when one class of data severely outnumbers
the other classes of data. Due to this tendency the
learner performance bias towards the majority class.
In case of evolving streams this degree of imbalance
varies from time to time. Further due to lifelong
learning, the underlined concept generation function
prone to changes thus leads to concept drifts.
From (Gama et al, 2013) in terms of Bayesian
classifier, there are three types of concept drifts that
are due to the change in (i) the posterior probabilities
(ii) the prior probabilities without
effecting the and (iii) the likelihood
without effecting . In addition to this, a drift
coexist together. Generally, the concept drift is
countered by active or passive methods. The latter
methods first tracks and detect the drifts and then
adapt to the changes by instance forgetting and
weighing mechanisms. Whereas, in the formal
methods a single learner may continuously adapt to
the changes by resetting the parameters or a new
classifier may be added /removed/updated from an
ensemble, no explicit drift detection is carried out.
This paper focuses on the active method of drift
detection and adaption.
Further (Gama et al, 2013) discusses several drift
detection methods based on supervised learning.
These methods directly or indirectly detect the drift
based on the classifiers performance estimates such
as error, accuracy in both online and batch modes
and fail to detect the drift in case of imbalanced
streams due to poor or nil prediction from minority
class (Wang and Minku, 2017). There are solutions
based on tracking the changes in minority class True
Positive Rate (TPR) (Wang et al, 2013) and on
classifiers four rates such as TPR, False Positive
Rate (FPR), Positive Prediction value (PPV) and
Negative Prediction value (NPV) (Wang and
Abraham, 2015). Prequential AUC of online learners
is also proposed in (Brzezinski and Stefanowski,
2017) to detect drift in dynamic imbalanced streams
with concept drift. However all this methods are
based on supervised estimate of the minority class
and prone to false positives due to the dynamic
change in TPR.
To address this problem, we present a two-stage
drift detector with an unsupervised drift warning
indicator at Stage 1 and an unbiased supervised
estimator with queried labels for drift conformation
Himaja, D., Padmaja, T. and Krishna, P.
An Unsupervised Drift Detector for Online Imbalanced Evolving Streams.
DOI: 10.5220/0007926302250232
In Proceedings of the 8th International Conference on Data Science, Technology and Applications (DATA 2019), pages 225-232
ISBN: 978-989-758-377-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
225

at stage 2. Here the unsupervised drift warning
indicator is independent with target and only rely on
distribution changes. Then the supervised indicator
confirms the drift if there is a significant variation in
the performances. The learning and adaption of the
stream with proposed drift detector is through
querying the uncertainty samples by batch based
active learning.
The paper organization is as follows. Section 2
presents the work related to drift detection and
adaption, Section 3 describes the proposed batch
based drift detection and adaption. Data stream
description, experimental setup results and
discussion are presented in Section 4. Finally, this
paper concludes in section 5.
2 RELATED WORK
The drift detection methods are categorized into two:
(i) active (ii) passive. The active methods works
based on drift detection and adaption. The drift can
be detected using
Hypothesis Tests: Validates the NULL
hypothesis, i.e., the two samples are derived
from same distribution (Patist, 2007 and
Nishida and Yamauchi, 2007).
Change-point Method: Tracking the point of
change of the behaviour of distribution
function (Hawkins, Qiu and Wook kang,
2003).
Sequential Hypothesis Test: Constantly
monitoring the stream until it attains enough
confidence to accept or reject the hypothesis
test (Wald, 1945).
Change Detection Test: Identifies the drift
based on a threshold on a classification error or
on a feature value (Bifet and Gavalda, 2007).
The use of Hellinger distance and adaptive
Cumulative SUM test for change detection
between data chunks is also studied in (Ditzler
and Polikar, 2011 )
Once the drift is detected in an evolving stream,
the learning framework adapts it by learning a new
model on current knowledge and forgetting the old.
The forgetting mechanisms are of selecting random
samples to filter, or weighing the samples based on
their age so that the sample with largest age is
forgotten. Another method is of windowing, once
the change is detected, the samples which are
relevant to current learner only retained in the
window. But the size of the window is critical here,
the adaptive window size mechanisms based on
Intersection of Confidence Interval (ICI) are
proposed in (Alippi, Boracchi and Roveri, 2011).
Unlike the drift detection and adaption methods the
passive approaches, constantly update the model to
adapt the change with new evolving data. The model
updation is carried out by resetting the parameters
(single classifier adaption) or add/remove/update a
classifier in an ensemble.
So far the drift detection methods for supervised
learning are intended for balanced classes and used
supervised performance estimates such as error,
accuracy and four rates such as TPR, NPR, PPV and
NPV. However, recently, few drift detection
methods are proposed for imbalanced streaming
distributions. The Drift Detection Method Online
Class Imbalance (DDM_OCI) (Wang et al, 2013) is
a modification to DDM (Gama et al, 2004). Unlike
DDM, whose focus is on the change detection in
over all error rate, DDM_OCI tracks changes in TPR
assuming that the drift in the distribution leads to
significant changes when there is an imbalance in
the stream. But, DDM_OCI is quite sensitive to the
dynamic imbalance rate of change than the real
concept drift which results in many false positives.
Instead of tracking the changes only in TPR (Wang
and Abraham, 2015) proposed a Linear Four rates
tracking mechanism for drift detection. If significant
change is detected in any of the performance rates
such as TPR, FPR, PPV and NPV then the drift
signal is alarmed. In (Brzezinski and Stefanowski,
2017) proposed a Prequential AUC based drift
detection mechanism which identifies the drift in
Prequential AUC by Page-Hinkley test. In (Yu et al,
2019) proposed a two-layer drift detection method
where layer 1 adapts LFR and layer 2 is based on
permutation test and both layers are of supervised.
All these methods mainly based on tracking the
changes in supervised performance estimators and
can prone to false positives due to the sensitivity of
TPR towards dynamic imbalance rather than drift at
high degree of imbalance cases. We propose two-
stage drift detection based on unsupervised and
supervised change tracking.
3 PROPOSED METHOD
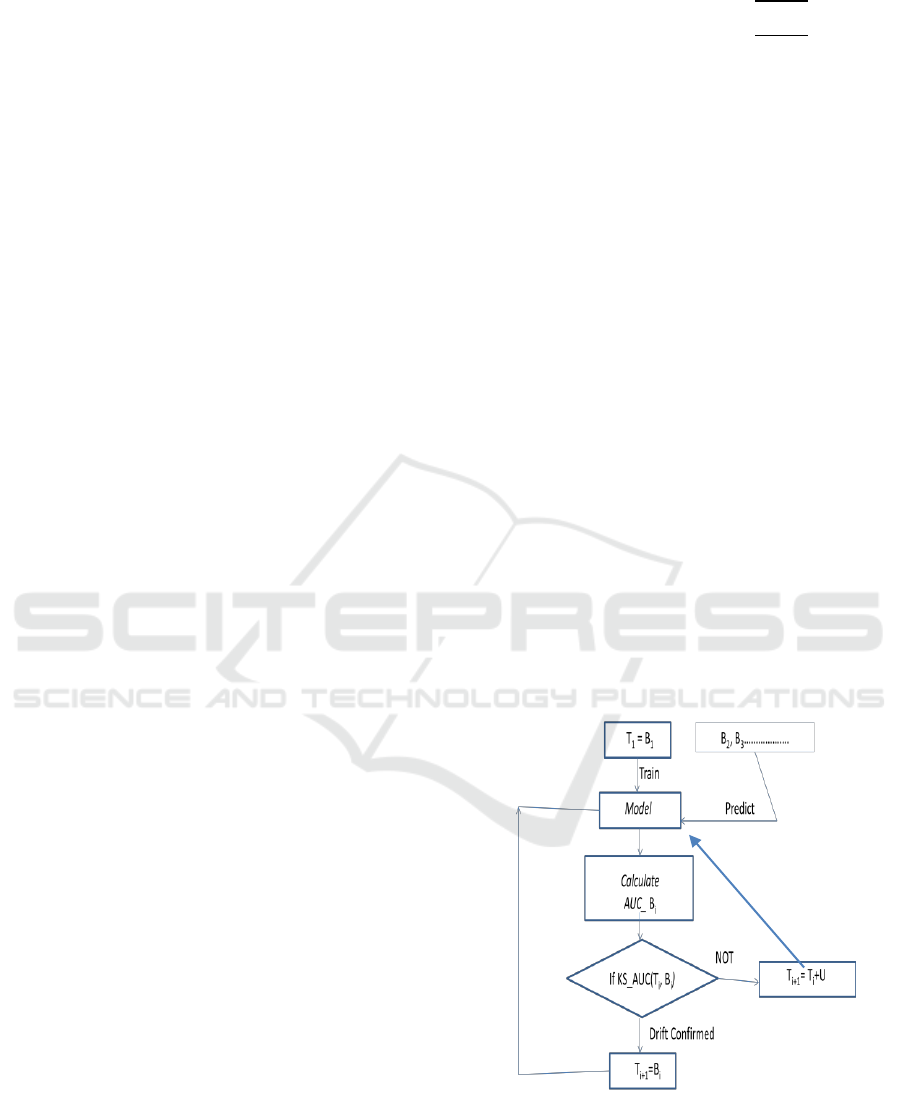
Figure 1 depicts the flow diagram for proposed drift
detection and adaption method. Here the Learning of
the stream as well as the adaption to the drift is
handled based on batch based active learning. The
drift detection is carried out in two stages, named it
as Kolmogorov-Smirnov_Area under Curve
(KS_AUC) method. This drift detector assumes
initial training set is labelled and the rest of the
stream evolved as unlabelled.
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
226
3.1 Learning and Adaption to the Drift
Here the stream is learned based on interleaved
training and testing of batches. The learning
mechanism is chosen as active learning of batches
(Pohl et al 2018) and presented in Algorithm 1. The
first batch is assumed as initial training set T
1
, a new
Model is learned, the corresponding class labels
are predicted for each sample and the
(Area
Under ROC Curve) is computed using (Fawcett,
2006). For each upcoming batch B
i
, at first the class
labels are predicted using already trained Model.
Later B
i
undergoes a two stage drift detection
KS_AUC ( ), considering current training T
i
as
reference window and B
i
as detection window
along with calculated AUC's,
and
.
The KS_AUC ( ) algorithm is presented in
Algorithm 2 in detail. If the concept drift is not
confirmed between the windows, the training set for
the next iteration T
i+1
is updated with the samples of
current training T
i
and with the uncertainty samples
which are less than a given threshold β . The labels
of these samples are queried by oracle. If the
concept drift between the two windows is
conformed then the old Model is replaced with a
new Model considering n+m samples from B
i
whose labels are obtained by querying the Oracle.
As the stream is with imbalanced class distributions
for the better probability to be the minority sample
getting labelled the n samples from B
i
are selected
whose uncertainty < α. In addition to this, m
random samples (i.e.,
)
are also selected from B
i
as new Training set T
i+1
for
the next iteration. Further, here. Then the
rest of the procedure iterates same like earlier.
3.2 Two Stage Drift Detection
KS_AUC
For unbalanced streaming distributions, the drift
detection methods based on supervised i.i.d's
(independent and identically distributed random
variables) prone to biased estimates (Wang et al.,
2018) thus, it is critical to detect the concept changes
in unsupervised manner. Therefore, the stage I of
KS_AUC is based on the hypothesis tests, without
label information the hypothesis tests are capable
enough to detect the changes across the
distributions. Here, a non parametric Kolmogorov-
Smirnov (KS) test is chosen to measure the distance
between the two distributions. KS test rejects the
NULL hypothesis i.e., the two samples drawn under
same distribution at significant level α provided for
the following inequality.
(1)
Where m and n are the sizes of the two
distributions,
and
are empirical
distribution functions ( of the first and
second distributions, is the supermom function,
are considered from a known table with
significant level of α. The KS test is performed for
all attribute
for two
distributions by considering each
and in
of
common attribute X into reference W
1
and detection
window W
2
. If the NULL hypothesis is rejected for
any W1 and W
2
then the warning signal for the drift
is triggered. Instead of KS any other two-sample
hypothesis tests can also considered here. Usually
the hypothesis tests are of quite sensitive to all types
of distributional changes, they are much prone to
false positives. Therefore, the stage 1 used as
warning signal for the underlined drift and stage II
detection is incorporated for the confirmation of the
drift.
At Stage II an unbiased supervised performance
estimator AUC between the batches A and B are
used to confirm the drift. If the
>
λ then the drift conformation is signalled, here λ is a
threshold for AUC change between A and B. Here
is the Model performance on reference
window at T
i
where as
is the Model
performance on the detection window.
Figure 1: Flow Diagram for KS_AUC Drift Detection.
An Unsupervised Drift Detector for Online Imbalanced Evolving Streams
227
4 EXPERIMENTAL RESULTS
This section presents the results of proposed drift
detectors when compared to existing drift detectors
such as DDM, EDDM, and HDDM_Atest. These
drift detectors are considered from MOA (Bifet et al,
2010). We used synthetic as well as real world data
sets for the experimental study. Number of drifts
confirmed is used as performance indicator in
evaluating the performance. Proposed drift detector
is validated on Naive Bayes, SVM, KNN classifiers.
These classifiers with proposed KS_AUC are
implemented.
4.1 Data Sets
The synthetic data streams i.e., SineV, Line, and
SineH are generated from (Minku, White and Yao,
2010) stream generating environment.
Corresponding data characteristics are shown Table
1. From these, two states of imbalances such as
STATIC and DYNAMIC, with single drift, multiple
drifts and without drift are generated. In STATIC
imbalance, the degree of imbalance remains static
for entire stream whereas in DYNAMIC imbalance
case the prior probabilities p(y) of the classes
changes dynamically as shown in Table 2.
The streams with specified settings are generated
for the length 1000. Here, the change in the data
stream is considered exactly from the middle of the
stream i.e., the Change Point (CP) is 501th time step.
For each of these imbalanced states, streams with
varied degrees of imbalance such as [1:9, 2:8 and
5:5] % are generated. In addition to the simulated
datasets, real world concept drift dataset electricity
is also used in the analysis.
4.2 Experimental Setup
This section analyses the results obtained towards
drift detection. Table 3 shows the results obtained
for static imbalance with or without the drift. Here
the drift is measured with number of drifts predicted
Vs known drifts in the data. The False positive
prediction of the drift here referred as False Alarm.
False negative prediction of the drift here referred as
possible unpredicted drift. Developed KS_AUC ( )
drift detector for semi supervised streams is
compared with supervised i.i.d based drift detectors
such as DDM, EDDM and HDDM_A test. The
viability of the KS_AUC ( ) drift detector is verified
on SVM, NB and KNN online batch learners.
In case of static degree of imbalance without
drifts there is no change in the entire stream even in
terms of probabilities or concept so the drift
detectors should not trigger any changes. From
Table 3 it is identified that EDDM triggered false
alarms where as DDM, HDDM_Atest and KS_AUC
( ) better performed by not triggering any false
Algorithm 2: KS_AUC the Batch wise KS and AUC
test.
Input: Reference Batch A, Detection Batch B, AUC of
batch A and B, AUC threshold λ, significant level α
and d number of dimensions.
Output: Drift detection status {1: Detected 0: Not
detected}
1. For i=1 to d do
1. W
1
= A
i
, W
2
= B
i
.
2. IF KS test on W
1
, W
2
with α rejects
the NULL hypothesis then break from
the loop
2. END for #Drift Warning
3. If (i>d) then return 0;
4. Else if |AUC (A)-AUC (B)|> λ, then
Return 1 #Drift Conformation
5. End If
5. END if
Algorithm 1: Active Learning Framework.
Input: Evolving Stream of Batches B1, B2, ∞,
uncertainty thresholds α, β .
Output: Classification Model for every iteration
1. Initialize: Training set T
1
= B
1
2. For i=1 to ∞ do
Learn a Model using T
i
If (i==1)
Return the prediction outcome of each
sample in B
1
and AUC_B
i
.
Else
Predict B
i
using Model and
If (KS_AUC (T
i
,
B
i
,
AUC_T
i
,
AUC_B
i
, λ) ==1) then
Confirm Drift and request the
labels of the samples n from B
i
whose uncertainty < α and
random samples of size m.
Where
. Learn New Model using
T
i+1
= (n+m) of B
i
and go to
step 2.
Else
Update Model using T
i+1
= T
i
+
(Uncertainty samples<β) in B
i
and
go to step 2.
3. End For
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
228
alarm. In this case EDDM has exhibited 12 false
alarms with respect to all synthetic streams of this
category. Hence with respect to above scenario
DDM, HDDM_Atest and KS_AUC yielded better
performance.
In case of static degree of imbalance with drift
(D) (i.e., p(y|x) change) proposed drift detector
predicted the drifts correctly on all datasets over
varied degree of imbalances such as [90:10, 80:20
and 50:50%]. However the other drift detectors
prone to either False Positives or False Negatives. In
particular at high degree of imbalance the drift
detectors are prone to False Negatives. In case of
balanced data streams DDM and HDDM_Atest has
exhibited False Negatives on SineH. In contrast
EDDM has exhibited false positives for SineH.
However DDM and EDDM are prone to false
positives for the streams like Line.
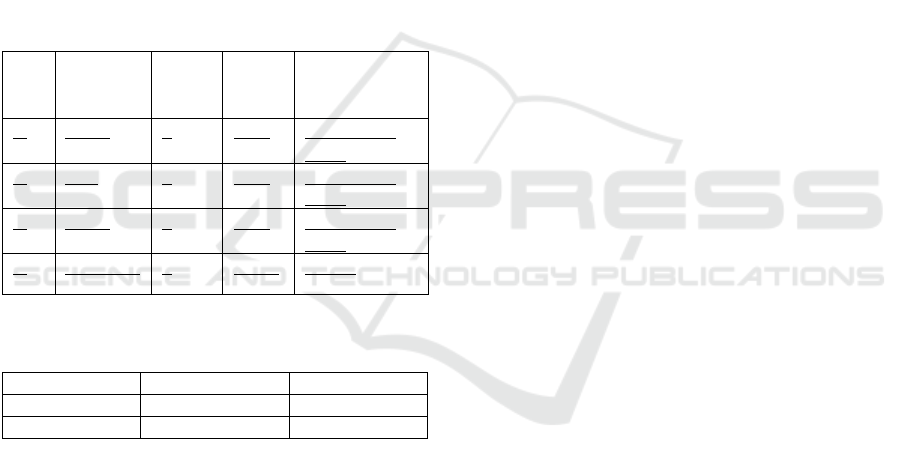
Table 1: Settings for Concept Drift Generator.
Table 2: Type of Imbalance Before and After the Drift for
1:9 case.
Imbalance
Before
After
LOW
1:9
1:9
HIGH
1:9
9:1
Even at high degree imbalanced cases such as 90:10
and 80:20, DDM and HDDM_A test has exhibited
false negatives in predicting the drifts for SineV and
Line datasets. However EDDM has exhibited false
negatives in 90:10 case of SineH dataset and false
positives for 80:20. So in this case we can say that
KS_AUC ( ) performed better than other drift
detectors in identifying the drift in case of high
degree of imbalance. Next to KS_AUC, EDDM
performed better. In case of multiple drifts DDM is
prone to false positives at balanced cases and at
highly imbalanced cases three drift detectors such as
DDM, EDDM and HDDM_Atest are prone to false
negatives. Hence in case of multiple drifts also our
algorithm KS_AUC performed well. Further, from
the number of labels queried by oracle is a
concerned, active learning batch based NB learner
queries more labels than SVM and KNN learners.
Table 4 shows Dynamic change in imbalance with
drift (i.e p(y) change). In Dynamic change of
imbalance with drift (i..e priors and concept also
changes) KS_AUC and HDDM_Atest performed
equally in predicting the drift except the multiple
drift stream Line. For this stream KS_AUC prone to
one false positive and HDDM_Atest prone two to
five false positives. This might be due to sudden
raise in performance due to p(y) change. Concerned
with balanced case the DDM has exhibited false
positives except SineH dataset whereas in case of
EDDM except sineH dataset the drifts are correctly
predicted for other data sets. In case of imbalanced
streams such as 80:20 and 90:10 in single drift case
DDM correctly identified the drift where as EDDM
prone to false positives in one drift scenario.
Whereas in multiple drift case (Line data set)
DDM has exhibited false positive at balanced case
where as at imbalanced cases every detector
exhibited false alarm where our algorithm exhibited
only one false positive hence in consideration with
overall performance our detector performed well.
Further, similar with Static imbalance case online
NB has queried more number of labels than the
SVM and KNN learners
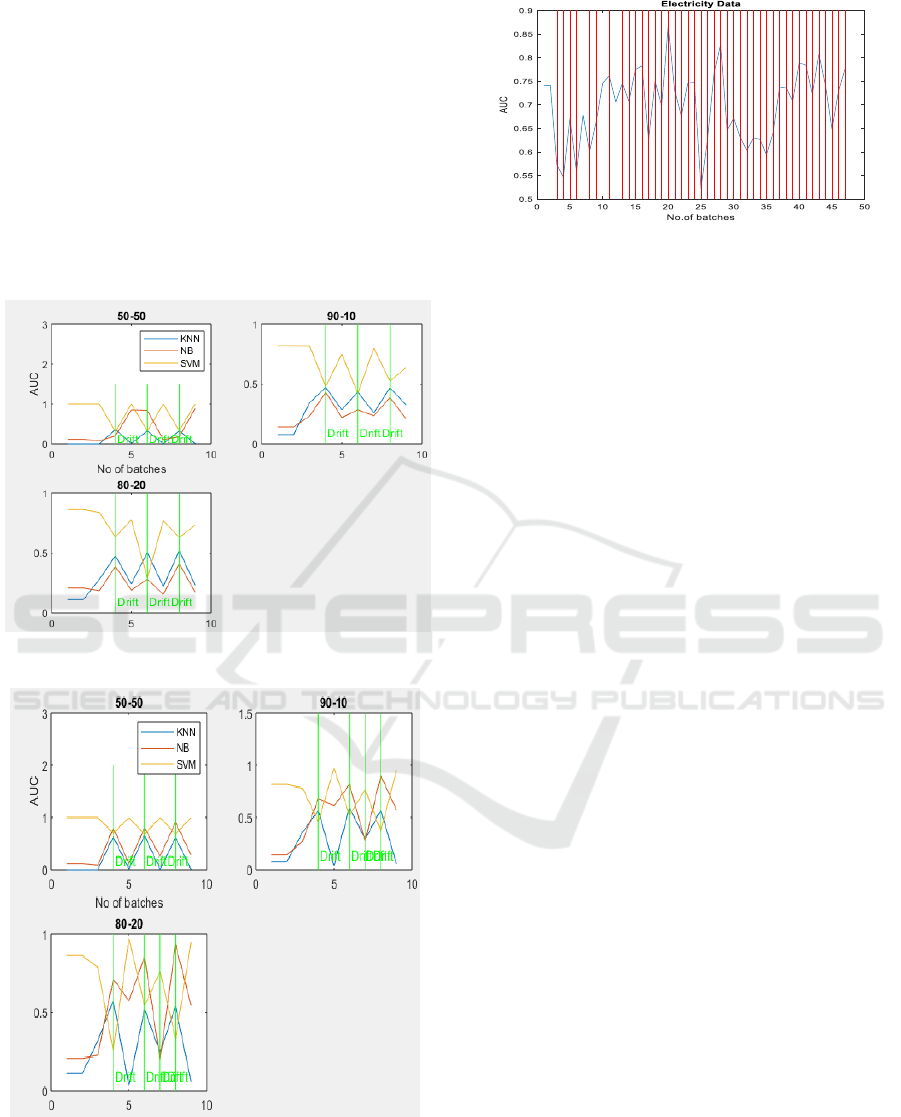
Figure 2 and 3 depicts AUC plots for static and
dynamic cases with different imbalance ratios i.e.,
[50-50, 90-10, and 80-20] with respect to different
classifiers such as KNN, NB and SVM for Line
dataset with three drifts. Figure 4 shows AUC plot
for electricity data set. The X-axis represents
number of batches and Y-axis represents AUC. The
second level of KS_AUC, the AUC variation at the
batch with drift is indicated with a green vertical line
for all datasets except electricity dataset which is
indicated by red line. In case of static imbalance, for
KNN classifier a clear damping is observed, for NB
classifier in all the cases except 50-50 (at first drift
point) there is clear damping whereas for SVM there
is significant rise of AUC at drift points is observed.
In case of dynamic imbalance, KNN classifier shows
a clear damping at each and every drift point, NB
also shows a clear damping at every drift point
except third drift point (i.e. false drift) where as
SVM shows clear improvement in AUC at every
drift point except third drift point which is a false
drift.
Table 5 shows the results for real world data set
Electricity, in this case the number of drifts in this
case is not prior known. The obtained results are
concerned, DDM has shown 22 drifts, EDDM has
No
Data
Stream
No. Of
Attrib
utes
No. of
Sampl
es
% Degree of
Imbalance
1.
SineV
2
1000
50:50,80:20,
90:10
2.
Line
2
1000
50:50,80:20,
90:10
3.
SineH
2
1000
50:50,80:20,
90:10
4.
Electricity
4
45312
~60:40
An Unsupervised Drift Detector for Online Imbalanced Evolving Streams
229
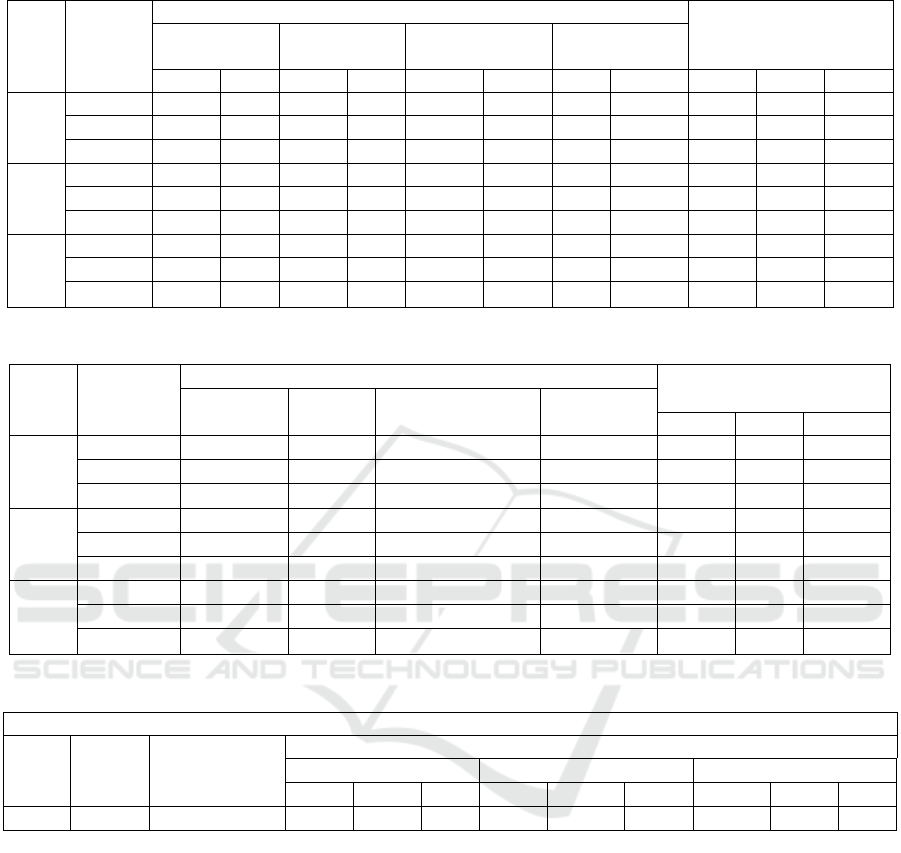
Table 3: Static Imbalance with (D) and without (N) Drift, the Notation -(-) Indicates Drifts Predicted(Known Drift).
.Data
set
Imbalance
ratio
Drift Detection Status
Percentage of
labelling
DDM
EDDM
HDDM_Atest
KS_AUC
N
D
N
D
N
D
N
D
SVM
NB
KNN
SineV
50-50
0(0)
1(1)
0(0)
1(1)
0(0)
1(1)
0(0)
1(1)
29.6
35.5
26.7
90-10
0(0)
0(1)
0(0)
1(1)
0(0)
0(1)
0(0)
1(1)
34.4
37.6
28.9
80-20
0(0)
0(1)
1(0)
2(1)
0(0)
0(1)
0(0)
1(1)
33.2
39
27.3
SineH
50-50
0(0)
0(1)
4(0)
3(1)
0(0)
0(1)
0(0)
1(1)
30.3
33.3
19.2
90-10
0(0)
0(1)
0(0)
0(1)
0(0)
0(1)
0(0)
1(1)
30.1
32.1
24.7
80-20
0(0)
1(1)
3(0)
7(1)
0(0)
0(1)
0(0)
1(1)
39.8
39.9
39.8
Line
50-50
0(0)
5(3)
0(0)
3(3)
0(0)
3(3)
0(0)
3(3)
24.5
30.2
15.8
90-10
0(0)
1(3)
0(0)
2(3)
0(0)
1(3)
0(0)
3(3)
20.8
36.7
25.5
80-20
0(0)
1(3)
4(0)
2(3)
0(0)
1(3)
0(0)
3(3)
25.5
25.5
30.2
Table 4: Drift Detection with Dyna/mic Imbalance Case (a Combined Problem of Change in Priors and Concept Drift).
Dataset
Imbalance
ratio
Drift detectors
Percentage of labelling
DDM
EDDM
HDDM_Atest
KS_AUC
SVM
NB
KNN
SineV
50-50
2(1)
1(1)
1(1)
1(1)
30.5
38.8
19.2
90-10
1(1)
2(1)
1(1)
1(1)
29.7
34.7
24.7
80-20
1(1)
5(1)
1(1)
1(1)
31.3
35.5
36.8
SineH
50-50
1(1)
2(1)
1(1)
1(1)
30.9
35.5
26.6
90-10
1(1)
5(1)
1(1)
1(1)
34.1
39.5
29.9
80-20
1(1)
8(1)
1(1)
1(1)
38.2
39.9
33.6
Line
50-50
5(3)
3(3)
3(3)
3(3)
22
31.2
25
90-10
5(3)
7(3)
5(3)
4(3)
26.5
35
23.5
80-20
6(3)
9(3)
7(3)
4(3)
24.9
36.5
21.5
Table 5: Real World Dataset (Electricity).
DRIFT DETECTORS
DDM
EDDM
HDDM_Atest
KS_AUC
Threshold=3%
Threshold=5%
Threshold=10%
SVM
KNN
NB
SVM
KNN
NB
SVM
KNN
NB
22
307
319
42
42
42
41
42
42
41
42
42
shown 307 and HDDM_Atest has shown 319 drifts
respectively, whereas our KS_AUC exhibited 42
drifts at 3% uncertainty threshold for all
classifiers. At 5% and 10% threshold SVM exhibited
41 drifts, KNN and NB exhibited 42 drifts
respectively. Since the considered methods for
comparison are all supervised i.i.d based drift
detectors, the experiments are also conducted for
KS_AUC in supervised manner with the target label
of each sample. From the results it is noticed that no
change in Drift Detection performance from
supervised to semi supervised versions of KS_AUC.
This is due to phase I of KS_AUC, which detects the
drift in unsupervised manner.
5 CONCLUSION
This paper proposes a new batch based drift
detection method for imbalanced evolving streams.
Proposed approach is based on two stages that
include unsupervised as well as supervised detection
with queried labels. Experimental results on
synthetic and real world streams reported that with
the proposed approach the drifts at both balanced
and unbalanced streams are correctly detected.
Further, in comparison with prominent drift
detectors such as DDM, EDDM, and HDDM_Atest
proposed method yielded better detection in case of
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
230
imbalanced streams. In case of imbalanced streams
the detection rate is on par with DDM, EDDM and
HDDM_Atest.
ACKNOWLEDGEMENTS
This work is supported by the Defense Research and
Development Organization (DRDO), India, under
the sanction code: ERIPR/GIA/17-18/038. Center
for Artificial Intelligence and Robotics (CAIR) is
acting as reviewing lab for the work is concerned.
Figure 2: AUC Plots for Static Imbalance Case.
Figure 3: AUC Plot for Dynamic Imbalance Case.
Figure 4: AUC Plot for Electricity Dataset Fir Svm
Classifier.
REFERENCES
Ditzler, G., Roveri, M., Alippi, C., Polikar, R., 2015.
Learning in Non Stationary Environments: A Survey.
In IEEE Computational Intelligence Magazine,
Volume 10, Issue 4, Pages 12-25.
Gama, J., Zliobaite, I., Bifet, A., Pechenizkiy, M.,
Bouchachia, A., 2013. A Survey on Concept Drift
Adaptation. In ACM Comput. Surv. 1, 1, Article 1
(January 2013), 35 pages.
Wang, S., Minku, LL., Yao, X., 2017. A Systematic Study
of Online Class Imbalance Learning With Concept
Drift. In IEEE Transactions on Neural Networks and
Learning Systems, Volume 29, Issue 10, DOI:
10.1109/TNNLS.2017.2771290, 2018.
Wang, S., Minku, LL., Ghezzi, D., Caltabiano, D., Tino,
P., Yao, X., 2013. Concepts drift detection for online
class imbalance learning. In The International Joint
Conference on Neural Networks(IJCNN).
Wang, H., Abraham, Z., 2015. Concept drift detection for
streaming data. In International Joint Conference of
Neural Networks 2015.
Brzezinski, D., Stefanowski, J., 2017. Properties of the
area under the ROC curve for data streams with
Concept drift. In Knowledge and Information Systems,
Volume 52, Issue 2, Pages 531-562.
Patist, JP., 2007. Optimal window change detection. In
Proceedings of 7th IEEE International Conference
of Data Mining Workshops, 2007, Pages 557-562.
Nishida, k., Yamauchi, K., 2007. Detecting concept drift
using statistical testing. In International Conference
on Discovery Science, Berlin, Germany, Pages 264–
269.
Hawkins, D. M., Peihua, Q, and Chang, W.K, 2003. The
change point model for statistical process control.
Journal of Quality Technology, Volume 35, Issue 4,
Pages 355–366.
Wald, A., 1945. Sequential tests of statistical hypotheses.
Ann. Math. Statist, Volume 16, Issue 2, Pages 117–
186.
Bifet, A., Gavalda, R., 2007. Learning from time-
changing data with adaptive windowing. In
Proceedings of the Seventh SIAM International
An Unsupervised Drift Detector for Online Imbalanced Evolving Streams
231

Conference on Data Mining, April 26-28, 2007,
Minneapolis, Minnesota, USA.
Ditzler, G., Polikar, R., 2011. Hellinger distance based
drift detection for nonstationary environments. In
Proceedings of IEEE symposium on computational
intelligence in dynamic and uncertain environments,
Pages 41- 48.
Alippi, C., Boracchi, G., Roveri, M., 2011. A just-in-time
adaptive classification system based on the
intersection of confidence intervals rule. In Neural
Networks, volume 24, Issue 8, Pages 791-800.
Gama, J., Medas, P., Castillo, G., Rodrigues, P., 2004.
Learning with drift detection. In Brazilian Symposium
on Artificial Intelligence, pp. 286-295.
Yu, S., Abraham, Z., Wang, H., Shah, M., Wei, Y,
Principe, JC., 2019. Concept Drift Detection and
adaptation with Hierarchical Hypothesis Testing.
Journal of the Franklin Institute. DOI:
10.1016/j.jfranklin.2019.01.043
Pohl, D., Bouchacia, A., Hellwagner, H., 2018. Batch-
based active learning: Application to social media data
for crisis management. In Expert system with
applications, Volume 93, Pages 232-244.
Fawcett, T., 2006. An Introduction to ROC Analysis.
Pattern recognition of letters, Volume 27, Issue 8,
Pages 861-874.
Bifet, A., Holmes, G., Kirkby, R., Pfahringer, B., 2010.
MOA: Massive online analysis. Journal of Machine
Learning Research, volume 11, Pages 1601–1604.
Minku, L.L., White, A.P., Yao, X., 2010. The Impact of
Diversity on On-line Ensemble Learning in the
Presence of Concept Drift. IEEE Transactions on
Knowledge and Data Engineering, volume 22, Issue 5,
Pages 730–742. DOI:10.1109/TKDE.2009.1
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
232
