
On Dynamic Output Feedback H
∞
Control for Positive Discrete-time
Delay Systems
Baozhu Du
School of Automation, Nanjing University of Science and Technology, 210094, P. R. China
Keywords:
Bounded Real Lemma, Dynamic Output Feedback, Positive Systems, Time Delay.
Abstract:
This paper is devoted to the H
∞
control design of positive discrete-time systems with multiple delays. Novel
bounded real lemma is presented first via linear matrix inequality technique, which reveals that H
∞
norms
of a discrete-time positive system with time delays both in dynamic and output equations are identical to
that of the corresponding delay-free system. Necessary and sufficient conditions for positivity preserving
H
∞
stabilization via a dynamic output feedback control are established in the forms of matrix equalities, that
guaranteeing the closed-loop system not only to be asymptotically stable and positive, but also to have a
desired H
∞
performance. The proposed results are extended to interval uncertain positive systems with time
delay. Finally, an example is given to illustrate the effectiveness of the obtained design scheme.
1 INTRODUCTION
Positive systems are a class of systems whose state
variables are never negative, for any given nonneg-
ative initial state and nonnegative input. Lots of
stability and stabilization problems for time-delayed
positive systems have been reported in the literature,
see, for instance (Gao et al., 2004b), (Cui et al.,
2018). Necessary and sufficient conditions based on
linear programming technique were given to guaran-
tee the asymptotical stability of discrete-time positive
systems with constant delays in (Liu, 2009), which
proved that the magnitudes of delays have no impact
on system stability. Stability analysis of positive sys-
tems with bounded time-varying delays was studied
in (Liu et al., 2010). Exponential stability of pos-
itive time-delayed systems was investigated in (Zhu
et al., 2012) by the Lyapunov-Krasovskii functional
based method, and diagonal Riccati stability criteria
was presented in (Mason, 2012) by using the separat-
ing hyperplane theorem.
For the controller synthesis, an output feedback
controller has to be used if no full access to the system
states (Wang et al., 2015), (Shu et al., 2012), (Zhang
et al., 2018). There are generally two types of strate-
gies to avoid NP-hard problem (Blondel and Tsitsik-
lis, 1995). One is so-called relaxation, which is easy
to implement, but conservatism may be introduced in
some cases (Gao et al., 2004a). The other strategy is
the local optimization which minimizes the objective
function near the feasible point. Most accurate meth-
ods to static output feedback synthesis involve local
optimization, for instance, the direct iterative proce-
dure (D-K iteration), iterative linear matrix inequality
(ILMI) and the cone complementarity linearization
(CCL) (Geromel et al., 1994). The free-weighting
matrix method proposed in (He et al., 2007) has re-
duced the conservatism in controller synthesis, but
always introduces extra coupling terms among con-
troller gain, Lyapunov matrices and system matri-
ces (Mirkin and Gutman, 2005). To decouple these
cross-product terms, an augmentation approach was
proposed in (Shu and Lam, 2009) provided an equiv-
alent form of the H
∞
stabilization criterion for positive
delay-free systems.
The bounded real lemma (BRL) and Kalman-
Yakubovich-Popov(KYP) lemma for linear positive
systems without time delays was presented by T.
Tanaka and C. Langbort in (Tanaka and Langbort,
2010) , in which the KYP lemma made the condi-
tion of H
∞
controller design be convex and tractable
with the help of the small gain theorem and the hyper-
plane separation theorem. Strict/non-strict inequal-
ity versions of KYP lemma for single-input single-
output discrete-time positive systems without time
delays were developed in (Najson, 2013) where a
quadratic Lyapunov function was formulated by a di-
agonal Lyapunov matrix (Farina and Rinaldi, 2000).
BRL in terms of matrix inequality for continuous-
time positive systems with time delays in states was
760
Du, B.
On Dynamic Output Feedback H Control for Positive Discrete-Time Delay Systems.
DOI: 10.5220/0007931607600766
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 760-766
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

provided in (Zhang et al., 2015), and the criteria for
dynamic output feedback H
∞
stabilizability were also
proposed. To the authors’ knowledge, there are still
no related results to the H
∞
stabilization problem for
discrete-time positive system with discrete delays.
Based on the above observations, this paper is mo-
tivated to present BRL of discrete-time positive sys-
tems with time delays for the first time, with further
discussion on H
∞
control by means of dynamic out-
put feedback control strategy. The remaining parts of
this paper are organized as follows. Preliminary is in-
troduced in Section 2 and a novel BRL is established
in Section 3. Necessary and sufficient conditions are
proposed to prove that H
∞
performance of positive
time-delayed systems are independent on the magni-
tudes of delays. In the aspect of controller synthe-
sis, necessary and sufficient conditions are presented
in Section 4 to design dynamic output feedback con-
trollers, which leads to the closed-loop system to pos-
sess asymptotical stability, positivity, and desired H
∞
performance simultaneously. Section 5 extends re-
sults to interval linear discrete-time systems with both
time delays and uncertainties. A numerical example
is given to illustrate the effectiveness of the obtained
results in Section 6.
2 PRELIMINARIES
The notations throughout this paper are fairly stan-
dard. For two matrices A ∈ R
m×n
and B ∈ R
m×n
,
A ≥ B, A > B, A ()B, respectively, denote that
A
i j
≥B
i j
, A
i j
≥B
i j
but A 6= B, A
i j
> (<)B
i j
, for all i =
1, 2, . . . , m, j = 1, 2, . . . , n. For A ∈ R
n×n
, A 0 and
A ≺0 mean that A is a positive semidefinite and a neg-
ative definite matrix, respectively.
h
X,Y
i
= trace(XY )
is the inner product on S
n
. The asterisk “∗” in a matrix
represents a term which can be induced by symmetry.
Moreover,
N
+
, R set of positive integers, set of real numbers
R
n
set of n-dimensional real vectors
R
m×n
set of m ×n real matrieces
¯
R
n
+
, R
n
+
nonnegative and positive orthants of R
n
S
n
space of n-th order real symmetric matrices
D
n×n
+
set of all diagonal positive definite matrices
e
i
vector with 1 in ith position and 0 elsewhere
1, I vector [1, 1, . . . ,1]
T
, identity matrix
A
i j
ith component of matrix A
A
T
transpose of A
trace(A) trace of matrixA
ρ(A) spectral radius of matrix A
¯
σ(A) maximum singular value of matrixA
D(A) vector composed of diagonal entries of A
Consider a linear discrete-time positive system
with time delays in state and output equations as fol-
lows,
Σ
0
: x(k + 1) = Ax(k) +
q
∑
i=1
A
i
x(k −d
i
) + Bω(k),
z(k) = Cx(k) +
q
∑
i=1
C
i
x(k −d
i
) + Dω(k),
x(k) = φ(k), k ∈ [−d, 0],
(1)
where x(k) ∈
¯
R
n
+
, ω(k) ∈
¯
R
m
+
, z(k) ∈
¯
R
p
+
are the
state, exogenous input and output vectors, respec-
tively. A, A
i
, B,C,C
i
, D are known real matrices with
appropriate dimensions, d
i
is a constant time delay,
φ(k) ∈
¯
R
n
+
is the vector-valued initial function on
[−d, 0] with d , max{d
i
}, i = 1, 2, . . . , q. Some neces-
sary definitions and lemmas are provided first, which
are useful in the subsequent technical development for
linear time-delay positive systems.
Definition 1. Matrix A ∈ R
n×n
is Schur stable if
ρ(A) < 1.
Lemma 1. ((Berman and Plemmons, 1979)) For two
matrices A ∈ R
n×n
+
, B ∈ R
n×n
+
, ρ(A) ≥ ρ(B) if A ≥ B.
Lemma 2. (Liu, 2009) For positive system Σ
0
, the
following statements hold:
(i) System Σ
0
is positive if and only if A ≥ 0, B ≥ 0,
C ≥ 0, D ≥ 0, A
i
≥ 0, C
i
≥ 0, i = 1, 2, . . . , q;
(ii) System Σ
0
is asymptotically stable if and only if
ρ
A +
q
∑
i=1
A
i
< 1.
The transfer function matrix of system Σ
0
is given
by
G
0
(z) =
C+
q
∑
i=1
z
−d
i
C
i
zI −A−
q
∑
i=1
z
−d
i
A
i
−1
B+D,
and its H
∞
norm is defined as
||G
0
||
∞
= sup
θ∈[0,2π)
¯
σ(G(e
jθ
)).
A sufficient condition to check H
∞
characteristics of
system Σ
0
with q = 1 has been established in (Gao
et al., 2004a) as follows.
Lemma 3. (Gao et al., 2004a) Positive system Σ
0
with q = 1 is asymptotically stable and ||G
0
||
∞
< γ
if there exist matrices P 0 and Q 0 such that
M + diag
{
Q, −Q, 0
}
≺ 0, (2)
where
M =
A
T
PA −P +C
T
C A
T
PA
1
+C
T
C
1
C
T
1
C + A
T
1
PA A
T
1
PA
1
+C
T
1
C
1
D
T
C + B
T
PA B
T
PA
1
+ D
T
C
1
C
T
D + A
T
PB
A
T
1
PB +C
T
1
D
B
T
PB + D
T
D −γ
2
I
.
On Dynamic Output Feedback H Control for Positive Discrete-Time Delay Systems
761

3 BOUNDED REAL LEMMA
(BRL)
In this section, we shall point out that H
∞
perfor-
mance of the discrete-time positive linear system Σ
0
with constant delays is insensitive to the magnitude of
the delays. Our purpose is to give a characterization
on the BRL for system Σ
0
with multiple time delays.
To this end, we first introduce two nominal delay-free
positive systems:
Σ
1
: x(k + 1) =
˜
Ax(k) + Bω(k),
z(k) =
˜
Cx(k) + Dω(k),
(3)
Σ
2
: x(k + 1) = Ax(k) + Bω(k),
z(k) = Cx(k) + Dω(k).
(4)
For simplicity, define
˜
A = A +
˜
A
d
,
˜
A
d
=
q
∑
i=1
A
i
,
˜
C =
C +
˜
C
d
,
˜
C
d
=
q
∑
i=1
C
i
. The transfer functions of sys-
tems Σ
1
and Σ
2
are, respectively, given by
G
1
(z) =
˜
C
zI −
˜
A
−1
B + D
G
2
(z) = C(zI −A)
−1
B + D
with z = e
jθ
, θ ∈ [0, 2π). It has been pointed out
in (Najson, 2013) that, if system Σ
2
is positive and
asymptotically stable, ||G
2
||
∞
=
¯
σ(G
2
(1)). On the ba-
sis of this fact, the following lemma can be obtained
which is useful sequentially.
Lemma 4. If system Σ
0
is positive, asymptotically
stable and ||G
0
||
∞
< γ, then ||G
2
||
∞
≤ ||G
1
||
∞
< γ.
Proof: If positive system Σ
0
is asymptotically stable
and ||G
0
||
∞
< γ, one has
¯
σ(G
0
(1)) < γ. Obviously,
||G
1
||
∞
=
¯
σ(G
1
(1)) =
¯
σ(G
0
(1)) < γ. It follows from
Lemma 2 that
(I −
˜
A)
−1
=
∞
∑
k=0
˜
A
k
≥
∞
∑
k=0
A
k
= (I −A)
−1
≥ 0,
which leads to 0 ≤ G
2
(1) ≤ G
1
(1). Accord-
ing to Lemma 1, ||G
2
||
∞
=
¯
σ(G
2
(1)) ≤
¯
σ(G
1
(1)) =
||G
1
||
∞
< γ is derived.
Theorem 1. [Single delay] When q = 1. System Σ
0
is asymptotically stable and ||G
0
||
∞
< γ if and only if
there exist P ∈ D
n×n
+
and Q ∈ D
n×n
+
such that inequal-
ity (2) holds.
Proof: Necessity. Define a discrete-time system
ˆ
Σ
0
: x(k + 1) = Ax(k) + A
1
x(k −d
1
) + Bω(k),
z(k) =
ˆ
Cx(k) +
ˆ
C
1
x(k −d
1
) +
ˆ
Dω(k),
x(k) = φ(k), k ∈ [−d
1
, 0],
(5)
in which
ˆ
C =
1
γ
C,
ˆ
C
1
=
1
γ
C
1
,
ˆ
D =
1
γ
D. Its trans-
fer function matrix is denoted by
ˆ
G
0
(z). If sys-
tem Σ
0
with q = 1 is positive, asymptotically stable
and ||G
0
||
∞
< γ, one has ||
ˆ
G
0
||
∞
= ||
1
γ
G
0
||
∞
< 1. At
this point, it turn s to prove that, if system
ˆ
Σ
0
is posi-
tive, asymptotically stable and ||
ˆ
G
0
||
∞
< 1, there must
exist P ∈ D
n×n
+
and Q ∈ D
n×n
+
satisfying
ˆ
M + diag
{
Q, −Q, 0
}
< 0, (6)
where
ˆ
M is M defined in Lemma 3 with C, C
1
and D,
respectively, replaced by
ˆ
C,
ˆ
C
1
and
ˆ
D, and γ = 1.
The proof will be given by contradiction. Sup-
pose that, for every P ∈ D
n×n
+
, there does not exist any
nonzero Q ∈ D
n×n
+
such that LMI (6) holds. Define
two sets
S
1
,
ˆ
M + diag
{
Q, −Q, 0
}
Q ∈ D
n×n
+
,
S
2
, {R|R ≺ 0, R ∈ S
2n+m
}.
It can be easily verified that both sets S
1
and S
2
are
convex and nonempty. The intersection of sets S
1
and
S
2
is empty means that S
1
∩S
2
=
/
0. It follows from
the separating hyperplane theorem (Boyd and Balakr-
ishnan, 2004) and convex analysis (see (Rockafellar,
2015)) that two disjoint convex sets can be separated
by a hyperplane, that is, there exists a nonzero matrix
H ∈ S
2n+m
such that
h
H,Y
i
≥ 0, ∀Y ∈ S
1
, (7)
h
H, X
i
< 0, ∀X ∈ S
2
. (8)
From condition (8), that is,
h
H, X
i
= trace(HX) < 0,
one can easily verify that H 0. Defining
H =
H
11
H
12
H
13
H
T
12
H
22
H
23
H
T
13
H
T
23
H
33
0,
inequality (7) yields that, for any Q ∈ D
n×n
+
,
trace
H(
ˆ
M + diag
{
Q, −Q, 0
}
)
=trace(H
ˆ
M) + trace((H
11
−H
22
)Q) ≥ 0.
It follows from Q > 0 that
trace(H
ˆ
M) ≥ 0, (9)
D(H
11
−H
22
) ≥ 0, (10)
otherwise, there must exist nonzero H 0 and Q ∈
D
n×n
+
such that trace(H
ˆ
M) + trace((H
11
−H
22
)Q) <
0 for any fixed P ∈ D
n×n
+
.
Define a nonzero vector h ,
h
T
1
h
T
2
h
T
3
T
∈
R
2n+m
+
with h
i
=
√
H
ii
, i = 1, 2, 3. From inequality (9)
and Lemma 1, one has trace(hh
T
ˆ
M) ≥ 0 which is
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
762

equivalent to,
Ω ,h
T
1
(A
T
PA −P +
ˆ
C
T
ˆ
C)h
1
+ h
T
2
(A
T
1
PA +
ˆ
C
T
1
ˆ
C)h
1
+ h
T
3
(B
T
PA +
ˆ
D
T
ˆ
C)h
1
+ h
T
1
(A
T
PA
1
+
ˆ
C
T
ˆ
C
1
)h
2
+h
T
2
(A
T
1
PA
1
+
ˆ
C
T
1
ˆ
C
1
)h
2
+h
T
3
(B
T
PA
1
+
ˆ
D
T
ˆ
C
1
)h
2
+ h
T
1
(A
T
PB+
ˆ
C
T
ˆ
D)h
3
+h
T
2
(A
T
1
PB+
ˆ
C
T
1
ˆ
D)h
3
+h
T
3
(B
T
PB+
ˆ
D
T
ˆ
D−I)h
3
≥ 0.
(11)
From (10), one has h
1
≥ h
2
≥ 0. Note that vector h is
nonzero, and two cases will be discussed as follows.
Case 1: h
2
= 0. Inequality (11) leads to
h
T
1
(A
T
PA −P +
ˆ
C
T
ˆ
C)h
1
+ h
T
3
(B
T
PA +
ˆ
D
T
ˆ
C)h
1
+ h
T
1
(A
T
PB+
ˆ
C
T
ˆ
D)h
3
+h
T
3
(B
T
PB+
ˆ
D
T
ˆ
D−I)h
3
≥ 0
(12)
which can be rewritten as
h
1
h
3
T
ϒ
h
1
h
3
≥ 0.
in which
ϒ ,
A
T
PA −P +
ˆ
C
T
ˆ
C A
T
PB+
ˆ
C
T
ˆ
D
B
T
PA +
ˆ
D
T
ˆ
C B
T
PB+
ˆ
D
T
ˆ
D−I
.
It means that there exists a nonzero vector
h
T
1
h
T
3
T
such that the above inequality holds.
Equivalently, there does not exist P ∈ D
n×n
+
such that
ϒ ≺ 0. According to the KYP Lemma (in (Rantzer,
2016)) and Lemma 4, one has ||
1
γ
G
2
||
∞
≥ 1. This is a
contradiction.
Case 2: h
2
> 0. Due to the fact that h
1
≥ h
2
, Ω
defined in condition (11) satisfies
Ω ≤
h
1
h
3
T
(A + A
1
)
T
P(A + A
1
) −P + (
ˆ
C +
ˆ
C
1
)
T
(
ˆ
C +
ˆ
C
1
)
B
T
P(A + A
1
) +
ˆ
D
T
(
ˆ
C +
ˆ
C
1
)
(A + A
1
)
T
PB+ (
ˆ
C +
ˆ
C
1
)
T
ˆ
D
B
T
PB+
ˆ
D
T
ˆ
D−I
h
1
h
3
,
which is inconsistent with the fact that ||
1
γ
G
1
||
∞
< 1.
Hence, if system Σ
0
is positive, asymptotically
stable and
k
G
0
k
∞
< γ, there must exist P ∈ D
n×n
+
and
Q ∈ D
n×n
+
satisfying M + diag
{
Q, −Q, 0
}
≺ 0.
Sufficiency condition can be immediately ob-
tained from Lemma 3 and Theorem 1 given in (Wu
et al., 2009). This completes the proof.
After an algebraic manipulation, a simple equiva-
lent form of (2) in Theorem 1 can be obtained in the
following corollary, in which the matrix variable Q
appearing in Theorem 1 has been removed.
Corollary 1. Positive system Σ
0
with q = 1 is asymp-
totically stable and
k
G
k
∞
< γ if and only if there exists
P ∈ D
n×n
+
such that
(A + A
1
)
T
P(A + A
1
) −P + (C +C
1
)
T
(C +C
1
)
B
T
P(A + A
1
) + D
T
(C +C
1
)
(A + A
1
)
T
PB + (C +C
1
)
T
D
B
T
PB + D
T
D −γ
2
I
≺ 0.
(13)
Remark 1. From Lemma 4 and Theorem 1, it is clear
that the exact value of
k
G
0
k
∞
is given by
¯
σ(G
0
(1)) if
positive system Σ
0
with q = 1 is asymptotically stable.
That is, H
∞
norm of system Σ
0
is equivalent to that of
system Σ
1
, which is independent of time delays. Due
to this fact, Theorem 1 can be easily extended to the
case of multiple time delays, that is, q > 1, and A
1
and
C
1
being replaced by
∑
q
i=1
A
i
and
∑
q
i=1
C
i
.
The BRL for positive system Σ
0
with multiple
time delays can be directly obtained in the following
theorem, in which
˜
A and
˜
C are given in system Σ
1
.
Theorem 2. [Multiple delay] Positive system Σ
0
with
q > 1 is asymptotically stable and
k
G
0
k
∞
< γ if and
only if there exists a matrix P ∈ D
n×n
+
such that
˜
A
T
P
˜
A −P +
˜
C
T
˜
C
˜
A
T
PB +
˜
C
T
D
B
T
P
˜
A + D
T
˜
C B
T
PB + D
T
D −γ
2
I
≺ 0.
(14)
4 DYNAMIC OUTPUT
FEEDBACK H
∞
CONTROL
Due to the fact that full access to the system state is
usually impossible in real plants and often only par-
tial information of the state can be measured, one has
to use a controller based on output measurements.
It becomes necessary to develop H
∞
control theory
via output feedback control signal. On the basis of
the above preparatory work, next an explicit delay-
independent characterization of the positivity preserv-
ing H
∞
control will be developed. Since H
∞
norms of
positive time-delay systems only depend on system
matrices, our attention is restricted to the case of sin-
gle delay (that is, q = 1) and then the derived results
can be easily extended to the case of multiple delays
(that is, q > 1).
Consider a discrete-time positive system with one
constant delay as follows
x(k + 1) = Ax(k) + A
1
x(k −d) + Bω(k) + B
1
u(k),
z(k) = Cx(k) +C
1
x(k −d) + Dω(k) + B
2
u(k),
y(k) = Fx(k) + Hω(k),
x(k) = φ(k), k ∈ [−d, 0],
(15)
On Dynamic Output Feedback H Control for Positive Discrete-Time Delay Systems
763

where x(k) ∈ R
n
is the state, ω(k) ∈ R
m
is the exoge-
nous input, u(k) ∈ R
l
is the control input, z(k) ∈ R
p
is the controlled output, y(k) ∈ R
r
is the measure-
ment. A, A
1
, B, B
1
, B
2
,C,C
1
, D, F, H are real matrices
with compatible dimensions. A dynamic output feed-
back controller is given by
ξ(k + 1) = A
K
ξ(k) + B
K
y(k),
u(k) = C
K
ξ(k) + D
K
y(k),
(16)
where ξ(k ) ∈R
r
is the controller state, A
K
, B
K
,C
K
, D
K
are the controller gain matrices to be designed. The
following closed-loop system is conducted from sys-
tem (15) via the output feedback controller (16) .
x(k+1)
ξ(k+1)
=
A+B
1
D
K
F B
1
C
K
B
K
F A
K
x(k)
ξ(k)
+
A
1
0
0 0
x(k−d)
ξ(k−d)
+
B+B
1
D
K
H
B
K
H
ω(k),
z(k)=
C+B
2
D
K
F B
2
C
K
x(k)
ξ(k)
+
C
1
0
x(k −d)
ξ(k −d)
+(D+B
2
D
K
H)ω(k),
(17)
The validity of the performance-based design lies in
whether the closed-loop performance requirement can
be satisfied easily. Let us take an exploration of H
∞
performance-based control design upon the BRL rep-
resentation through an output feedback control, which
allows that the closed-loop system is positive, asymp-
totically stable and
k
G
k
∞
< γ.
Theorem 3. Given positive system (15) and a con-
stant scalar γ > 0, the existence of a dynamic out-
put feedback controller (16) such that the closed-
loop system (17) is positive, asymptotically stable
and
k
G
k
∞
< γ, is equivalent to the existence of ma-
trices P
1
∈ D
n×n
+
, P
2
∈ D
s×s
+
, Q
1
∈ D
n×n
+
, Q
2
∈ D
s×s
+
,
L
1
∈R
s×s
, L
2
∈R
s×r
, L
3
∈R
l×s
, L
4
∈R
l×r
satisfying
P
1
Q
1
= I, P
2
Q
2
= I, A+B
1
L
4
F ≥0, B
1
L
3
≥0, L
2
F ≥
0, L
1
≥ 0, B + B
1
L
4
H ≥ 0, L
2
H ≥ 0, C + B
2
L
4
F ≥ 0,
B
2
L
3
≥ 0, D + B
2
L
4
H ≥ 0, and
−P
1
0 0 A + A
1
+ B
1
L
4
F B
1
L
3
B + B
1
L
4
H
∗ −P
2
0 L
2
F L
1
L
2
H
∗ ∗ −I C +C
1
+ B
2
L
4
F B
2
L
3
D + B
2
L
4
H
∗ ∗ ∗ −Q
1
0 0
∗ ∗ ∗ ∗ −Q
2
0
∗ ∗ ∗ ∗ ∗ −γ
2
I
≺0.
(18)
Then the desired controller gain matrices are given by
A
K
= L
1
, B
K
= L
2
,C
K
= L
3
, D
K
= L
4
.
Proof: Applying Schur complement lemma and set-
ting P
−1
1
= Q
1
, P
−1
2
= Q
2
, A
K
= L
1
, B
K
= L
2
, C
K
=
L
3
, D
K
= L
4
, inequality (18) and two equality con-
straints can be derived from Theorem 2. Other in-
equalities used for guaranteeing the positivity of the
closed-loop system (17) can be derived directly from
Lemma 2. The proof is completed.
5 ROBUST H
∞
CONTROL
It is noted that, for two Schur stable matrices A
1
≥ 0
and A
2
≥ 0 with A
1
≥ A
2
, we have A
−1
1
≥ A
−1
2
. Mo-
tivated by this fact, there is a possible extension of
Theorem 1 to uncertain time-delay positive systems.
In this section, consider an interval uncertain discrete-
time positive system with a time delay as follows
x(k + 1) = A
I
x(k) + A
I
1
x(k −d) + B
I
ω(k) + B
1
u(k),
z(k) = C
I
x(k) +C
I
1
x(k −d) + D
I
ω(k) + B
2
u(k),
y(k) = Fx(k) + Hω(k),
x(k) = φ(k), k ∈ [−d, 0],
(19)
where A
I
∈
A, A
, A
I
1
∈
A
1
, A
1
, B
I
∈
B, B
, C
I
∈
C,C
, C
I
1
∈
C
1
,C
1
, D
I
∈
D, D
, A ≥ 0, A
1
≥ 0,
B ≥ 0, C ≥ 0, C
1
≥ 0, D ≥ 0,and A, A, A
1
, A
1
, B, B,
C, C, C
1
, C
1
, D, D are all constrained in metric space.
Theorem 4. Interval uncertain positive system (19)
is robustly asymptotically stable and
k
G
k
∞
< γ if and
only if there exists a matrix P ∈ D
n×n
+
satisfying that
"
(A + A
1
)
T
P(A + A
1
) −P + (C +C
1
)
T
(C +C
1
)
B
T
P(A + A
1
) + D
T
(C +C
1
)
(A + A
1
)
T
PB + (C +C
1
)
T
D
B
T
PB + D
T
D −γ
2
I
#
≺ 0.
Proof: If system (19) is positive and robustly asymp-
totically stable, ρ(A
I
) < 1 for any A
I
∈ [A, A]. It fol-
lows that C
I
+C
I
1
(I −A
I
−A
I
1
)
−1
B
I
+D
I
≤C +C
1
(I −
A −A
1
)
−1
B + D. Furthermore, from Lemma 2, one
gets
C
I
+C
I
1
(I −A
I
−A
I
1
)
−1
B
I
+ D
I
∞
≤
C +C
1
(I −A −A
1
)
−1
B + D
∞
< γ.
Therefore, according to Theorem 1, sufficiency and
necessity conditions are obvious.
Next, our objective is to design a dynamic out-
put feedback controller in (16) such that the following
closed-loop system
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
764
x(k+1)
ξ(k+1)
=
A
I
+B
1
D
K
F B
1
C
K
B
K
F A
K
x(k)
ξ(k)
+
A
I
1
0
0 0
x(k−d)
ξ(k−d)
+
B
I
+B
1
D
K
H
B
K
H
ω(k),
z(t)=
C
I
+B
2
D
K
F B
2
C
K
x(k)
ξ(k)
+
C
I
1
0
x(k −d)
ξ(k −d)
+
D
I
+B
2
D
K
H
ω(k).
(20)
is positive, robustly asymptotically stable and
||G||
∞
< γ.
Theorem 5. Given positive system (19) and a scalar
γ > 0, there exists a dynamic output feedback con-
troller (16) such that the closed-loop system (20) is
positive, robustly asymptotically stable and ||G
0
||
∞
<
γ if and only if there exist matrices P
1
∈ D
n×n
+
, P
2
∈
D
s×s
+
, Q
1
∈ D
n×n
+
, Q
2
∈ D
s×s
+
, L
1
∈ R
s×s
, L
2
∈ R
s×r
,
L
3
∈ R
l×s
, L
4
∈ R
l×r
such that A + B
1
L
4
F ≥ 0,
B
1
L
3
≥0, L
2
F ≥0, L
1
≥0, B +B
1
L
4
H ≥0, L
2
H ≥0,
C +B
2
L
4
F ≥ 0, B
2
L
3
≥0, D +B
2
L
4
H ≥0, P
1
Q
1
= I,
P
2
Q
2
= I, and
−P
1
0 0 A + A
1
+ B
1
L
4
F B
1
L
3
B + B
1
L
4
H
∗ −P
2
0 L
2
F L
1
L
2
H
∗ ∗ −I C +C
1
+ B
2
L
4
F B
2
L
3
D + B
2
L
4
H
∗ ∗ ∗ −Q
1
0 0
∗ ∗ ∗ ∗ −Q
2
0
∗ ∗ ∗ ∗ ∗ −γ
2
I
≺ 0.
(21)
If the above conditions hold, then the desired con-
troller gain matrices are given by
A
K
= L
1
, B
K
= L
2
,C
K
= L
3
, D
K
= L
4
.
Proof: It is obvious that A
+ B
1
D
K
F ≤ A
I
+ B
1
D
K
F
for any A
I
∈ [A, A]. If A + B
1
L
4
F ≥ 0 holds, then
A
I
+ B
1
L
4
F ≥ 0. Setting P
−1
1
= Q
1
, P
−1
2
= Q
2
, A
K
=
L
1
, B
K
= L
2
, C
K
= L
3
, D
K
= L
4
, and taking a similar
line as the proof of Theorem 3, the detailed proof is
omitted.
6 NUMERICAL EXAMPLE
This section presents one numerical example to illus-
trate the effectiveness of the proposed results. Con-
sider a discrete-time interval uncertain positive sys-
tem in (19) with one delay in the system state, and
system matrices given as follows:
A =
0.3648 0.3986 0.2695
0.3178 0.4146 0.4423
0.4812 0.1218 0.3757
, A =
0.3931 0.4181 0.2914
0.3398 0.4527 0.4718
0.5054 0.1470 0.3990
,
A
1
=
0.0221 0.0982 0.0322
0.0313 0.1001 0.0271
0.0182 0.0235 0.0283
, A
1
=
0.0323 0.1002 0.0385
0.0348 0.1320 0.0334
0.0293 0.0264 0.0379
,
B =
0.1560
0.1820
0.141
, B =
0.1835
0.2273
0.1705
, B
1
=
0.2318
0.4836
0.1931
, B
2
= 0.2358,
C
=
0.2170 0.1911 0.2143
,C =
0.2321 0.2233 0.3097
,
C
1
=
0.0243 0.0435 0.0219
, C
1
=
0.0339 0.0500 0.0254
,
F =
0.1408 0.1619 0.2045
, D = 0.2970, D = 0.3102.
It can be verified that this system is not robustly sta-
ble. We now apply the proposed approach to find
a reduced-order dynamic output feedback controller
in (16) with r = 2 such that the closed-loop system is
positive, robustly asymptotically stable and ||G||
∞
<
1. One group of feasible solutions of the constrained
conditions in Theorem 3 is obtained as follows,
P
1
=
0.9972 0 0
0 1.2481 0
0 0 0.8515
, Q
1
=
1.0028 0 0
0 0.8012 0
0 0 1.1744
,
P
2
=
0.9733 0
0 0.9733
, Q
2
=
1.0275 0
0 1.0275
,
L
1
=
0.1724 0.1724
0.1724 0.1724
, L
2
=
0.0423
0.0423
,
L
3
=
0.0363 0.0363
, L
4
= −3.8956.
The desired controller gain matrices A
K
, B
K
, C
K
and
D
K
are given by L
1
, L
2
, L
3
, L
4
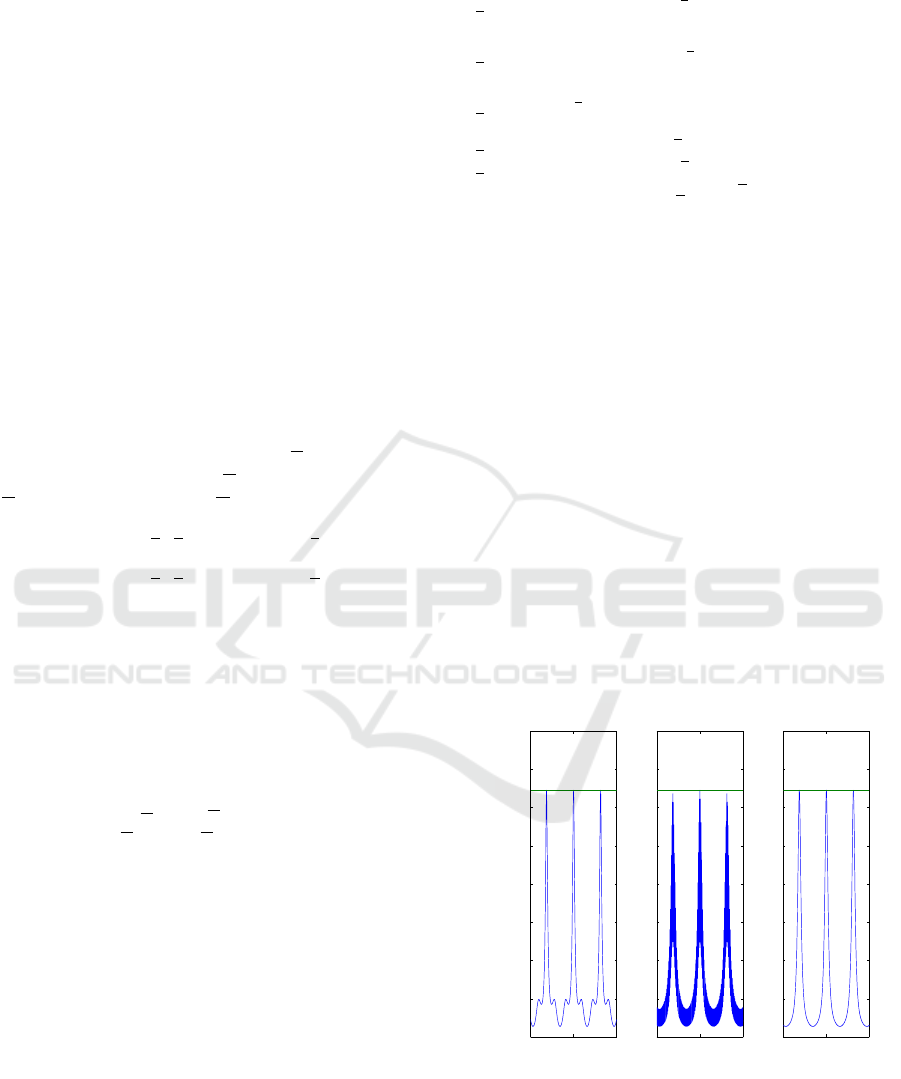
, respectively. Figure 1
gives the maximal singular value plots of the closed-
loop system when d = 2, d = 50, and d = 0. It shows
clearly in this example that H
∞
norm of discrete-time
interval uncertain positive system with time delays is
independent of the delay magnitude.
−10 0 10
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
Theta
Maximal singular value
d=2
−10 0 10
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
d=50
−10 0 10
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
d=0
Figure 1: Maximal singular value plots of the closed-loop
system.
On Dynamic Output Feedback H Control for Positive Discrete-Time Delay Systems
765

7 CONCLUSIONS
This paper has established the BRL for discrete-
time positive linear system with multiple time delays.
The proposed delay-independent criteria results re-
veal that H
∞
performance of positive systems with
time delays in state and output equations is equivalent
to the characterization of the corresponding delay-
free systems. The necessary and sufficient conditions
in the forms of matrix (in)equalities are established
for the H
∞
control problem via dynamic output feed-
back controls, which can be easily solved by using
Matlab toolbox, although the proposed approach is
not guaranteed to find a feasible solution even it ex-
ists.
ACKNOWLEDGEMENTS
This work is supported by the Alexander von Hum-
boldt Foundation of Germany.
REFERENCES
Berman, A. and Plemmons, R. (1979). Nonnegative Ma-
trices in the Mathematical Sciences. Academy Press,
New York.
Blondel, V. and Tsitsiklis, J. (1995). NP-hardness of some
linear control design problems. In Proceedings of
the 34th IEEE Conference on Decision and Control,
pages 2910–2915, New Orleans, LA.
Boyd, S. and Balakrishnan, V. (2004). Convex Optimiza-
tion. Cambridge University Press, Cambridge.
Cui, Y., Shen, J., and Chen, Y. (2018). Stability analysis
for positive singular systems with distributed delays.
Automatica, 94:170–177.
Farina, L. and Rinaldi, S. (2000). Positive Linear Systems:
Theory and Applications. Wiley-Interscience, New
York.
Gao, H., Lam, J., Wang, C., and Wang, Y. (2004a). Delay-
dependent output-feedback stabilization of discrete-
time systems with time-varying state delay. IEE Proc.-
Control Theory Appl., 151:691–698.
Gao, H., Lam, J., Yang, C., and Xu, S. (2004b). H
∞
model
reduction for discrete time-delay systems: delay in-
dependent and dependent approaches. Int. J. Control,
77(4):321–335.
Geromel, J. C., de Souza, C. C., and Skelton, R. E. (1994).
LMI numerical solution for output feedback stabiliza-
tion. In Proceedings of American Control Conference,
pages 40–44, Baltimore, MD, USA.
He, Y., Wang, Q., Xie, L., and Lin, C. (2007). Further im-
provement of free-weighting matrices technique for
systems with time-varying delay. IEEE Trans. Au-
tomat. Control, 52(2):293–299.
Liu, W. (2009). Stability and stabilization of positive sys-
tems with delays. In Proceedings of International
Conference on Communications, Circuits and Sys-
tems, pages 908–912, Milpitas, CA.
Liu, X., Yu, W., and Wang, L. (2010). Stability analysis for
continuous-time positive systems with time-varying
delays. IEEE Trans. Automat. Control, 55(4):1024–
1028.
Mason, O. (2012). Diagonal Riccati stability and posi-
tive time-delay systems. Systems & Control Letters,
61(1):6–10.
Mirkin, B. M. and Gutman, P.-O. (2005). Output feed-
back model reference adaptive control for multi-input-
multi-output plants with state delay. Systems & Con-
trol Letters, 54(10):961–972.
Najson, F. (2013). On the Kalman-Yakubovich-Popov
lemma for discrete time positive linear systems: a
novel simple proof and some related results. Int. J.
Control, 86(10):1813–1823.
Rantzer, A. (2016). On the Kalman-Yakubovich-Popov
lemma for positive systems. IEEE Trans. Automat.
Control, 61(5):1346–1349.
Rockafellar, R. T. (2015). Convex Analysis. Princeton Uni-
versity Press, Princeton, USA.
Shu, Z. and Lam, J. (2009). An augmented system approach
to static output-feedback stabilization with H
∞
perfor-
mance for continuous-time plants. Int. J. Robust &
Nonlinear Control, 19:768–785.
Shu, Z., Xiong, J., and Lam, J. (2012). Asynchronous
output-feedback stabilization of discrete-time Marko-
vian jump linear systems. In Proceedings of the 51st
IEEE Conference on Decision and Control, pages
1307–1312, HI, USA.
Tanaka, T. and Langbort, C. (2010). KYP lemma for in-
ternally positive systems and a tractable class of dis-
tributed H-infinity control problems. In Proceedings
of American Control Conference, pages 6238–6243,
MD, USA.
Wang, G., Li, B., Zhang, Q., and Yang, C. (2015). Pos-
itive observer design for discrete-time positive sys-
tem with missing data in output. Neurocomputing,
30(168):427–434.
Wu, L., Lam, J., Shu, Z., and Du, B. (2009). On stability
and stabilizability of positive delay systems. Asian
Journal of Control, 11(2):226–234.
Zhang, D., Zhang, Q., and Du, B. (2018). l
1
fuzzy observer
design for nonlinear positive markovian jump system.
Nonlinear analysis: Hybrid Systems, 27:271–288.
Zhang, Q., Zhang, Y., Du, B., and Tanaka, T. (2015). H
∞
control via dynamic output feedback for positive sys-
tems with multiple delays. IET Control Theory &
Appl., 9(17):2575–2580.
Zhu, S., Li, Z., and Zhang, C. (2012). Exponential stability
analysis for positive systems with delays. IET Control
Theory & Appl., 6(6):761–767.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
766
