
Development of an Experimental Strawberry Harvesting Robotic System
Dimitrios S. Klaoudatos
1
a
, Vassilis C. Moulianitis
2,3 b
and N. A. Aspragathos
3 c
1
Department of Electrical and Computer Engineering, University of Patras, Patra, Greece
2
Department of Product and Systems Design Engineering, University of the Aegean, Ermoupolis, Syros, Greece
3
Mechanical Engineering and Aeronautics Department, University of Patras, Patra, Greece
Keywords:
Agriculture Robotics, Harvesting Robot, Robot Vision, Robotic Gripper, Robot Operating System, Occluded
Crops.
Abstract:
This paper presents the development of an integrated strawberry harvesting robotic system tested in lab con-
ditions in order to contribute to the automation of strawberry harvesting. The developed system consists of
three main subsystems; the vision system, the manipulator and the gripper. The procedure for the strawberry
identification and localization based on vision is presented in detail. The performance of the robotic system
is assessed by the results of experiments that take place in the lab and they are related to the recognition of
occluded strawberries, the check of the strawberries for possible bruises after the grasping and the accuracy
of detection of the strawberries’ location. The results show that the developed vision algorithm recognizes
correctly every single strawberry and has high accuracy in recognizing occluded strawberries in which the
largest part of each of them is visible. A small localization error results in a correct grasp and cut without
causing damage to the fruit.
1 INTRODUCTION
The agriculture sector is changing due to the use of
new technologies such as automation, providing sig-
nificant benefits to the farmers. This paper deals with
the automation in the harvest of strawberries, one of
the most popular and profitable berries. The straw-
berry farmers around the world face serious problems
of labor shortage, due to the tedious working condi-
tions and the general social and financial conditions.
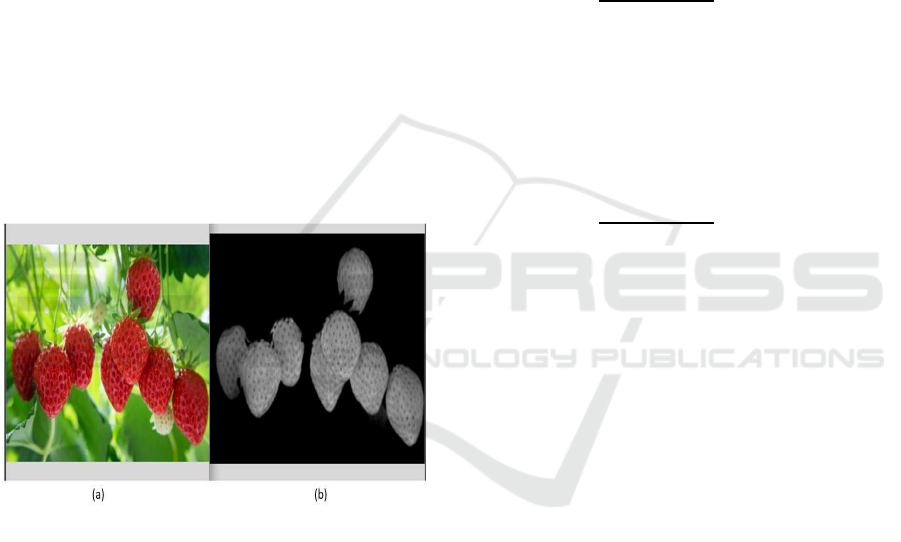
Today, the growth of strawberries in table-top culti-
vation (see figure 1) is very common, something that
facilitates the robotic harvesting process as the berries
are more approachable and they differentiate from the
leaves. In this way, harvesting robots offer quality,
higher productivity, as they can operate during the
whole day, and more profits to the producers with-
out having to modify the layout and the size of their
cultivation.
The actions that take place in harvesting is the de-
tection, the approach, the grasp and the placement of
the strawberry in a little box. In order to automate
a
https://orcid.org/0000-0002-5831-3363
b
https://orcid.org/0000-0003-1822-5091
c
https://orcid.org/0000-0002-7662-5942
this procedure, these actions must be accomplished
by a robotic system, which should contain at least a
computer vision system for the detection localization
of the mature fruit, a manipulator for the movement
of the gripper towards the grasping of the fruit.
A suitable robot vision system must include meth-
ods for the recognition and the localization of the
strawberry. The recognition of the strawberry is used
for the quality control of the fruit such as the check
of the maturity, the existence of diseases and dam-
ages in the fruit. These methods that were imple-
mented for other fruits can also be used for the straw-
berry case with some modifications. The mature fruits
are usually recognized by using color based meth-
ods (Slaughter and Harrell, 1987), by measuring a
fraction of the mature region of the strawberry over
the immature region (Hayashi et al., 2009) and (Feng
et al., 2008). The recognition of disease existence is
very useful as the defective strawberry must be sepa-
rated by the healthy ones and it is implemented by an
image segmentation method (Narendra and Hareesha,
2010).
The exact detection of strawberries’ place is the
most challenging point in the automated harvesting
as the strawberries can be occluded from other straw-
berries, leaves and other objects. There have been de-
Klaoudatos, D., Moulianitis, V. and Aspragathos, N.
Development of an Experimental Strawberry Harvesting Robotic System.
DOI: 10.5220/0007934004370445
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 437-445
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
437

Figure 1: Strawberries in table-top cultivation.
veloped methods to solve this problem with various
success rates. (Stajnko et al., 2004) used a thermal
camera (LWIR) in combination with an image seg-
mentation method in order to analyze the apple crops
by taking advantage of the difference in infrared ra-
diation between the fruit and the leaves. The success
rate of this method was increased, if the pictures were
taken in the evening, when there is a high difference
in temperature between the apples and the environ-
ment. (Yang et al., 2007) proposed a 3D stereo vision
system and color based image segmentation to dis-
tinguish effectively the tomato clusters, but they did
not achieve the separation of each tomato from their
cluster as the tomatoes had the same depth. (Nguyen
et al., 2014) made use of the redness of each pixel
in the colorful image of the RGB-D camera in order
to distinguish the apple from its background, imple-
mented the RANSAC algorithm, and obtained the lo-
cation of the center of each detected apple by using
an iterative estimation method to the partially visible
target object data.
Object classification methods were used on top of
the image segmentation to face the occlusions. These
methods create a model for the object to be detected,
using image training samples in different variations.
The Viola-Jones algorithm (Viola and Jones, 2001) is
very efficient in real time object detection as its cas-
cade structure makes the classifier extremely rapid.
(Puttemans et al., 2016) applied a semi-supervised
fruit detector for strawberries and apples by using
these object classification techniques. The detection
accuracy was improved in comparison to the previ-
ous methods, but only for the fruits that were used as
training samples and there is the problem of the pre-
cise characterization of a sample as positive or neg-
ative. (Li et al., 2018) use a deep learning method
in order to recognize elevated mature strawberries.
A neural network was trained in order to recognize
overlapping and occluded strawberries. This achieves
very high accuracy in the detection and the low aver-
age recognition time makes it suitable for real-time
machine picking, but the deep network training re-
quires a lot of iterations for a high rate of accuracyand
capturing and processing a huge amount of learning
samples of strawberries images. The cutting points
on the peduncles of double overlapping grape clus-
ters are detected in (Luo et al., 2018). The edges of
the clusters are extracted and the contour intersection
points of the two overlapping grape clusters are cal-
culated based on a geometric model, but there is the
limitation of non detection more than two overlapping
grape clusters.
In previous works, various types of grippers have
been developed in order to assure a sufficient grasp
of the strawberry without causing damage to this. A
common type of gripper consists of a scissor which
cuts and holds the strawberry by his peduncle in or-
der to avoid possible damage of the fruit. In ad-
dition, (Hayashi et al., 2009) used a suction device
which holds the fruit before its separation from the
peduncle if the localization error is small. (Hemming
et al., 2014) developed a gripper whose fingers adapt
to the fruit. It also contained a cut mechanism of the
fruit. These types of grippers have some drawbacks,
as the use of scissors lets a piece of the stem on the
strawberry which is undesirable and the suction de-
vice may cause serious damage to the fruit. (Dimeas
et al., 2015) designed and constructed a system which
grasps and cuts the strawberry in the way that a la-
borer would do. The localization of strawberry with
respect to the fingers is achieved using haptic sensor
and a fuzzy control system controls the force to be
applied to the strawberry for correct hold. The sepa-
ration of fruit from the peduncle is done by rotating
the grasped strawberry by 45
◦
.
In this paper, a robotic system for strawberry
harvesting is presented with emphasis to the vision
recognition and localization of the crop. The vision
system is based on a modified approach presented in
(Luo et al., 2018) and adapted to strawberries. The
Kinect V2 sensor is used and the integration of the
system is made in ROS. The methods for the ob-
ject detection, image segmentation based on the color
model, the feature detection and the object classifica-
tion are presented. The system is tested for occluded
crops and for various features, such as, position accu-
racy, success of removal and crop damage in a single
crop.
The remaining of the paper is organised as follow-
ing: In the next section the proposed method is pre-
sented briefly. The analysis of the integrated system
with emphasis to the vision methods and the exper-
imental results are presented in sections 3 and 4 re-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
438
spectively. Finally concluded remarks are closing this
paper.
2 THE PROPOSED APPROACH
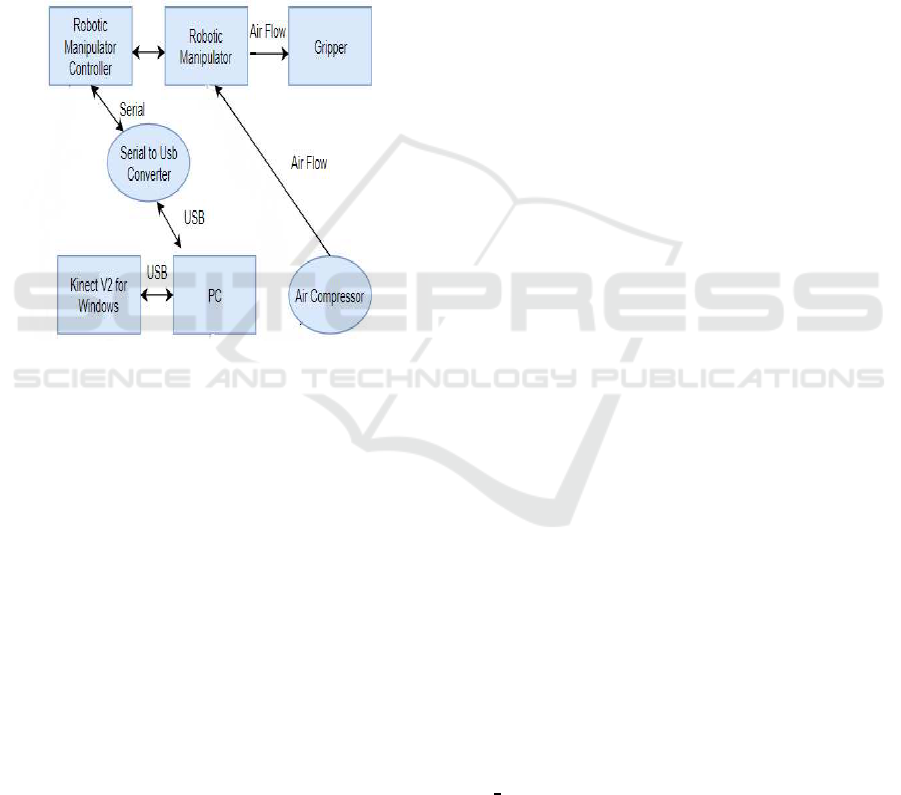
The structure of the system is illustrated in Figure
2. The sensor Kinect V2 for Windows depicts the
robot vision system, the robotic manipulator represent
the strawberry approach system and the gripper is the
grasping system. These subsystems are connected to
a PC where runs the software that is developed for the
purpose of this work.
Figure 2: Hardware structure of the developed robotic sys-
tem.
As it is mentioned in the introduction, the main
points for object detection are the image segmenta-
tion based on a color model, the feature detection and
the object classification. Since the strawberry has the
uniform red color and spores on its surface, the accu-
racy of a feature detection method is too low. Taking
into account these limitations and the demand for a
huge number of samples in order to create a reliable
model in the object classification technique, an image
segmentation method based on a color model is ap-
plied. In this direction, a suitable color model is used,
between the various available models, that represents
in an obvious way the color of the strawberries. After
image pre-processing, a threshold, that distinguishes
the pixels of the strawberries than the pixels of the
background, is selected. Furthermore, an algorithm
is developed based on the geometry of the strawber-
ries’ clusters in order to separate the strawberries that
belong to the same cluster.
After the successful recognition of the strawberry
and the computation of its center of mass, the distance
of the detected strawberry from the robot end-effector
is estimated. For this estimation, a depth sensor or
the capture of images from two different points can
be used. The depth sensors’ performance is quite in-
fluenced by the lighting conditions which have sig-
nificant variations in the outdoor environment. More-
over, these sensors have a remarkable error in depth
estimation as the distance of the object from the cam-
era increases. The second method requires the exis-
tence of two cameras or one moving camera. In the
case of strawberries, it is difficult to implement this
technique as they have a lot of same features on their
surface so it is tough to find the position of a certain
point in both images. As the experiments are done
in lab conditions, where the lighting conditions are
steady and controllable and the strawberries can be in
a distance where the depth sensor’s error is low, the
sensor Kinect for Windows v2 is used, mounted on
a fixed base, to estimate the strawberries’ position in
3D space. For the developmentof the computer vision
algorithms, the OpenCV library is used.
In a previous paper (Dimeas et al., 2013), the
movement of the labourers’ arm was studies and the
design of the gripper’s movement was based on this.
The robotic manipulator for the experiment is the
MITSUBISHI RV-A4 which has 6 DoF. In order to
grasp the strawberry, an open source three- fingered
design of a robot gripper is adapted, manufactured
using a 3D printer and mounted on the manipulator’s
arm.
In terms of the software of the system, Robot Op-
erating System (ROS) framework in a Linux operat-
ing system and C++ as the programming language are
used.
3 VISUAL IDENTIFICATION AND
LOCALISATION OF THE
STRAWBERRY
The main sensor for the visual identification and lo-
calisation of the strawberry is the Kinect which has
a monochrome CMOS sensor capable to observe the
infrared light. It is placed at an offset relative to the
IR emitter, and the difference between the observed
and the emitted IR dot positions is used to calculate
the depth at each pixel of the RGB camera. The
’libfreenect2’ open source driver for the Kinect for
Windows v2 device is used (Xiang et al., 2016). The
iai
kinect2 is used which includes tools and libraries
for the ROS interface of this sensor (Wiedemeyer,
2015). The implementation of the visual identifica-
tion and localisation of the strawberry is based on the
OpenCV software library.
The following algorithm for the robot vision sys-
tem is developed:
Development of an Experimental Strawberry Harvesting Robotic System
439
• The vision sensor is initialized and a color image
and a depth image are obtained by using a camera
grabber software package that is developed in the
ROS framework.
• The RG image (see Figure 3) is obtained using the
following formula:
I
rg
=
I
r
− I
g
, if I
r
≥ I
g
0, otherwise
(1)
where I
r
, I
g
∈ 0, ..., 255 are the intensity of the
pixels at the red and the green channel respec-
tively. These two channels are chosen as the ma-
ture strawberry is red and the leaves are green.
• In order to select an optimal threshold, the RG im-
age is segmented using the OTSU method (Otsu,
1979) and a binary image is derived. Morpholog-
ical transformations such as dilation and erosion
are used in a suitable sequence in order to fill holes
in the identified areas and to reduce the noise in
the binary image. In figure 5.a and figure 5.b the
binary image after the segmentation and after the
morphologicaltransformationsare shown, respec-
tively.
Figure 3: Result of applying the RG formula in an image.
(a) Original Image (b) Image after RG formula.
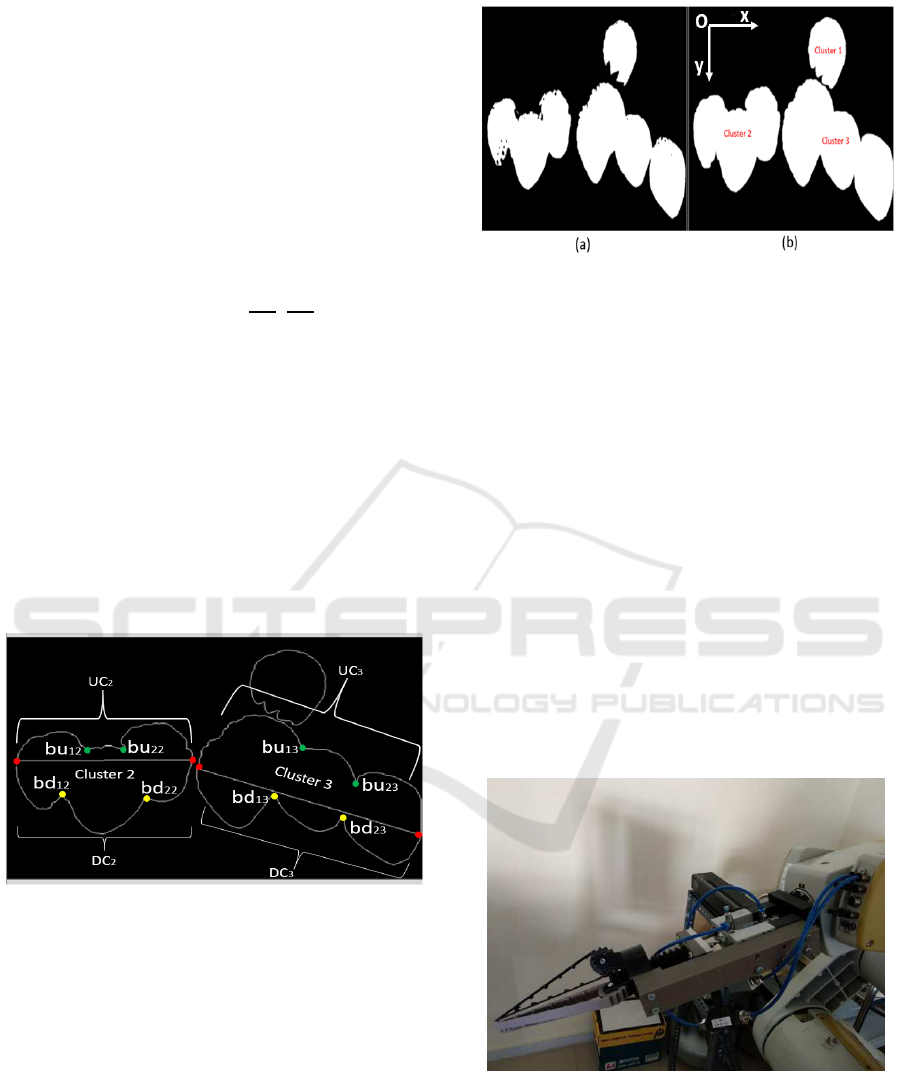
• The contours of the clusters of strawberries are
determined using the findContours function of
OpenCV (Bradski, 2000) which implements a
border following algorithm (Suzuki et al., 1985).
• For the j-th cluster, where j ∈ 1, . . . , nc and nc is
the number of the clusters in the image, the far-
left and the far-right points in the x-direction are
determined and connected with a line. The pos-
itive directions x and y and the beginning of the
coordinate frame are illustrated at the right image
of the figure 5. The space of the binary image D
bin
is defined as
D
bin
= {(x, y) ∈ R
2
: x ∈ (0, w), y ∈ (0, h), I
bin
(x, y) = 0 or 255) }
(2)
where w and h are the width and the height of the
image respectively and I
bin
(x, y) is the intensity of
the binary image at the pixel (x, y).
Therefore, for each cluster the far-left point
(x
l
, y
l
) and the far-right point (x
r
, y
r
) are:
(x
l
, y
l
) ∈ {(x, y) ∈ D
bin
: x
l
= minx ∀x ∈ cluster j}
(x
r
, y
r
) ∈ {(x, y) ∈ D
bin
: x
r
= maxx ∀x ∈ cluster j}
(3)
Then the diagonal line of each cluster is found in
order to classify the points of the contour of each
cluster in upper and down points and the equation
of this line is the following:
(−y) =
(−y
r
) − (−y
l
)
x
r
− x
l
(x− x
r
) + (−y
r
) (4)
• For each cluster, the points of their contours are
separated in upper and down points by comparing
their coordinates with the line designed in the pre-
vious step. So a point (x
u
, y
u
) belongs to the upper
part of the cluster, which is symbolized as the set
UC
j
, if the following inequality holds.
(−y
u
) >
(−y
r
) − (−y
l
)
x
r
− x
l
(x
u
− x
r
) + (−y
r
) (5)
Otherwise it belongs to the down part of the clus-
ter, which is the set DC
j
.
• The k local upper points, which are candidate re-
gions of the contours of the two images of the
two strawberries which intersect, (x
tukj
, y
tukj
) of
each cluster j are found by comparing the y value
of each point ∈ UC
j
with the corresponding y
values of its neighbor points, in the x-direction
neighborhood, and are defined as breaking points
(x
bukj
, y
bukj
). In case that there are many break-
ing points in a narrow area in the x-direction due
to the non uniformity of the found contour, then
the breaking point is considered to be the median
point between them as there is no possibility of
a large distance between these points because of
the geometry of strawberries’ shape at the break-
ing points. In a cluster j, if there are i breaking
points, it means that there are i+ 1 strawberries in
this cluster.
• The corresponding lower breaking point of each
upper breaking point is the point of DC
j
that has
the minimum Euclidean distance from the upper
breaking point i.e.
(x
bdij
, y
bdij
) = {(x, y) ∈ DC
j
: mindist((x, y), (x
buij
, y
buij
)) }
(6)
Then the corresponding upper and lower breaking
points are connected with a line and after we find
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
440
the contours of each cluster of strawberries by us-
ing the findContours function of OpenCV (Brad-
ski, 2000). The previous steps are illustrated in
the figure 4.
• The new contours are considered as strawberries
if their area satisfies a constraint that is defined by
taking into account the geometry of strawberries’
shape. The strawberries are considered to be con-
ical, but since the image is two-dimensional the
formulas for the area of a triangle are used.
• The center of each contour that corresponds to a
strawberry is determined by using the 1
st
and 2
nd
order moments, (x
c
, y
c
) = (
M
10
M
00
,
M
01
M
00
).
• The orientation of strawberry is computed by us-
ing Principal Component Analysis (PCA) (Brad-
ski, 2000). The angle of the eigenvector with the
largest eigenvalue corresponds to the main (larger
in length) axis and provides the orientation of the
strawberry in the image plane.
• The point cloud that is created is stored in the
memory like a one-dimensional matrix. The value
of the matrix at the index that corresponds to the
center (x
c
, y
c
) of the strawberry shows the depth
of the strawberry i.e the distance of the strawberry
with respect to the camera frame.
Figure 4: Explanation of the geometric model. The red dots
show the far-left and far-right points, the green dots show
the breaking points of the upper part and the yellow points
show the down part of each of the clusters 2 and 3. Also,
the diagonal line of the equation (4) for each of the clusters
2 and 3 is presented.
4 ROBOTIC MANIPULATOR AND
GRIPPER
As the strawberries are detected and their locations
in 3D space are determined, then the robotic manip-
ulator moves the gripper to the position of the straw-
berries with an orientation defined according to the
strawberry orientation. The robotic manipulator has
Figure 5: (a) Segmenting the RG image (b) Morphological
transformations in the binary image.
6 DoF, the maximum load that it can hold is 3kg so
it bears the weight of the mounted gripper and its
workspace is sufficient in order to approach the straw-
berries. The manipulator’s controller receives the ex-
tracted coordinates of a strawberry and its orientation
and uses them as a reference signal for the movement
of the gripper towards grasping the specified straw-
berry.
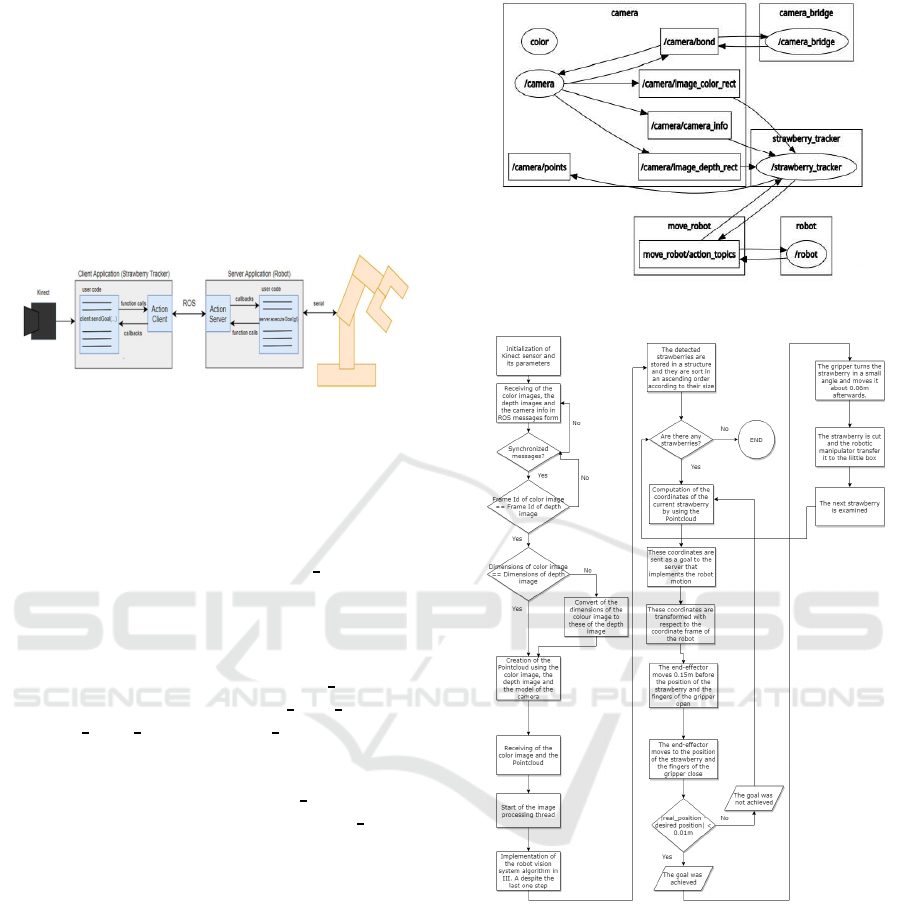
A gripper is designed and 3D printed (Figure 6).
The drafts of the main part of the gripper are open
source (Bieber, 2016). The fingers of the gripper
adapt to the strawberry since they are quite flexible.
The outside part of the finger is more compact than
the inside part in order to present a resistance to the
cut of the fruit and also the gap between the three fin-
gers is such that the fruit does not slip after grasping
The components of the gripper are made by using a
3D printer. The gripper is actuated pneumatically by
a simple open-loop ON-OFF control logic.
Figure 6: Gripper of the robotic system.
Development of an Experimental Strawberry Harvesting Robotic System
441
5 EXPERIMENTAL ROBOTIC
SYSTEM
The software for the experimental system is imple-
mented in the Linux operating system and in partic-
ular the 16.04 version of Xubuntu using ROS. Apart
from the developed software packages, some avail-
able ROS packages are used e.g the actionlib pack-
age. The use of the actionlib package in our system is
shown in figure 7.
Figure 7: Overview of ROS client-server interaction in the
robotic system.
The graph of the operation of ROS in shown in fig-
ure 8. In this work, the main developed ROS package
is the StrawberryHarvester. The ros nodes that are in-
cluded in the StrawberryHarvester package are shown
inside the ellipsoids that are the camera
bridge, which
is responsible for the beginning of the kinect sensor’s
operation, the definition of the topics for the cam-
era info, the color image and the depth image, and
the definition of camera parameters such as the im-
age resolution. Then the node strawberry
tracker sub-
scribes to the topics /camera/image color rect, /cam-
era/image
depth rect and /camera info in order to ob-
tain the color and depth images and create the point
cloud which publishes to the topic /camera/points af-
terward. Also, the nodes strawberry
tracker and the
robot communicate through the action move
robot.
The functional diagram of the strawberry harvest-
ing robotic system is shown in the Figure 9. When the
strawberries are located and their positions with re-
spect to the sensor’s coordinate frame are computed,
then these positions are transformed with respect to
the coordinate frame of the robot, so that they are sent
to the robotic manipulator’s controller.
6 EXPERIMENTAL RESULTS
Two types of experiments were carried out in order
to evaluate the developed system: (a) Recognition of
separate and occluded mature strawberries. (b) Evalu-
ation of the harvesting process for single strawberries.
The developed algorithm for recognition of straw-
berries has a great success rate. In the case of the sin-
gle strawberries, the success rate is 100 % as in a num-
Figure 8: ROS operation graph.
Figure 9: Flowchart of function of the robotic system.
ber of 30 images it recognized correctly all the straw-
berries. In the case of the occlusion, the algorithm
distinguishes the strawberries only if their largest part
is visible, i.e. the 60% of their area is not occluded
by other object or if the gap between the upper points
of the fruits is not large enough to consider a break-
ing point as it is illustrated in Figure 10 in which the
first from the left strawberry in the right cluster is not
separated from the adjacent strawberry that is located
in front of it. This is due to the fact that the edge in
the upper contour of these two strawberries does not
show a dip.
The recognition and the detection of a strawberry
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
442
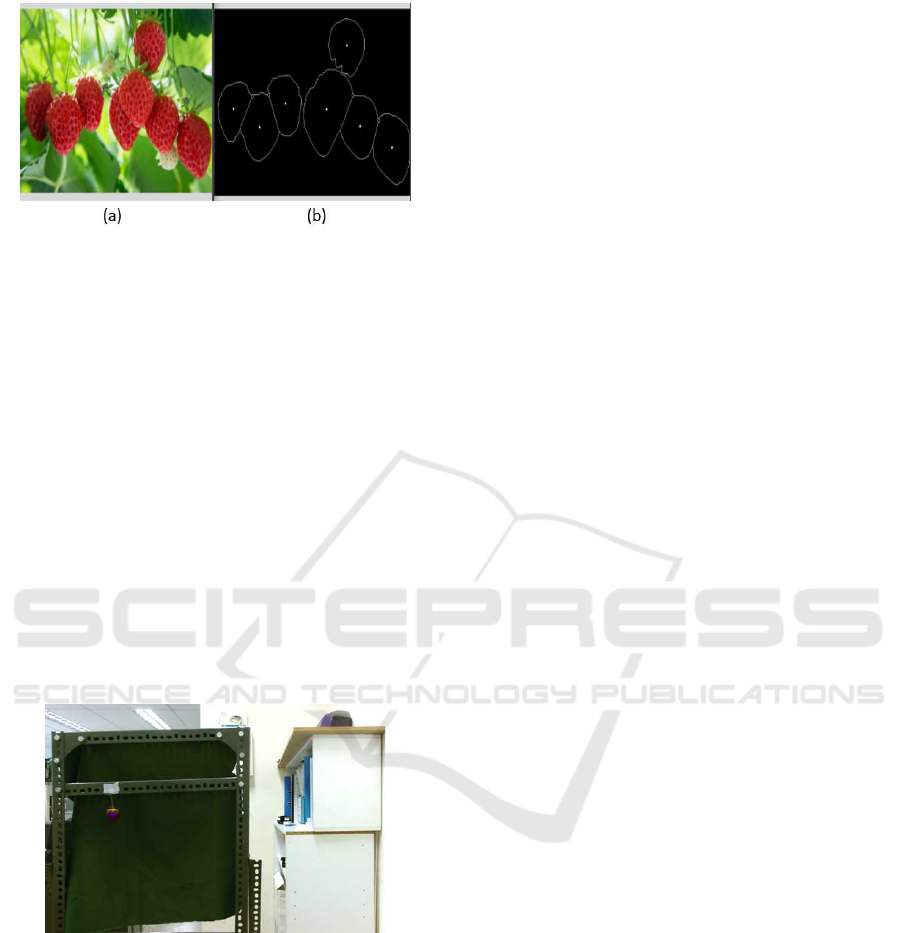
Figure 10: (a) Occluded strawberries (b) Result of applying
the vision algorithm in occluded strawberries.
during the experiment is represented in figure 11. The
harvesting experiment was set up by hanging fresh
strawberries with their peduncles on a metal structure
and putting some green cloth in order to simulate the
leaves and the immature strawberries. The calibration
of the sensor took place several times before the ex-
periment until achieving a good result in the 1
st
exper-
iment. Finally, the developed strawberry harvesting
robotic system is evaluated by repeating the harvest-
ing process a lot of times, in which the strawberries
are located in different positions around the field of
view of the camera and by checking the correctness
of the recognition, the accuracy of the localization,
the way of gripping the strawberry, the correctness of
the crop removal from the peduncle and the existence
of damages in the strawberry after the harvest. The
results are listed in Table 1.
Figure 11: Recognition and detection of a strawberry during
experiment.
According to Table 1, the mean error along the
X,Y,Z directions of the robot base coordinate frame is
0.45cm, 0.335cm and 0.11cm respectively. Therefore,
the mean error is inside the acceptable limits which
are 1cm in each direction. Also, it is shown that the
accuraccy of recognition and localization is 90% i.e.
18 out of the 20 cases. In the 4
th
experiment the error
is high which is due to the visual field and the dis-
tortion lens of the sensor and to the accuracy of the
calibration. In this case, the strawberry was placed
far from the center of the image where generally the
lens distortion is larger. In the 8
th
experiment, the er-
ror along the x direction is high as the strawberry was
far from the robot base and out of its workspace. In
the 18
th
experiment, the gripper goes a bit righter than
the position of the strawberry so it does not remove it
correctly after.
To sum up, the experimental results show that
the robotic system identifies occluded strawberries
and localize the mature separate strawberries with
great accuracy (90%) and large correct harvesting rate
(85%). The recognition and localization accuracy is
a bit larger than the 87% true positive rate in sweet-
peppers detection of (Hemming et al., 2014), the 88%
recognition accuracy in overlapping grape clusters
(Luo et al., 2018) and the 85% rate of correct detec-
tion in occluded apples (Nguyen et al., 2014). But, it
is smaller than the 95% average recognition rate by
using a deep learning method in recognizing straw-
berries. As regards, the success rate in harvesting, our
system shows a little bigger correct harvesting rate of
85% in relation to the 80% of (Hayashi et al., 2009).
With reference to the situation of the strawberry
after the harvest, the results showed that the gripper
grasped and cut the strawberry without causing dam-
age to its outer surface and deteriorating the quality
of the fruit. In a sample of 20 strawberries, only one
had some bruises which is justified by the fact that
some strawberries remained long time detached from
the plant. The images in figure 12 depict the situa-
tion of a strawberry at both sides before and after the
harvest. A video of the recorded harvesting process is
available at this link (Klaoudatos et al., ).
7 CONCLUSIONS
In this paper, a robotic system for strawberry harvest-
ing is developed and tested in laboratory conditions.
A new method for the recognition and localisation of
occluded mature strawberries is developed. A flexi-
ble gripper is built for grasping the strawberry and it
is tested with good success in grasping and removing
the strawberries without damaging them. The labora-
tory experimental results show that the developed sys-
tem is able to recognize occluded crops and localize
the mature separate strawberries with high accuracy
and large successful harvesting rate. Future work will
be focused on using larger sample of strawberries, as
now the experiments with 20 samples of strawberries
are initial experiments, and on achieving higher rate
of recognition of quite occluded strawberries using
machine learning algorithms and the incorporation of
an autonomous mobile robot in order to harvest the
strawberries in real conditions.
Development of an Experimental Strawberry Harvesting Robotic System
443
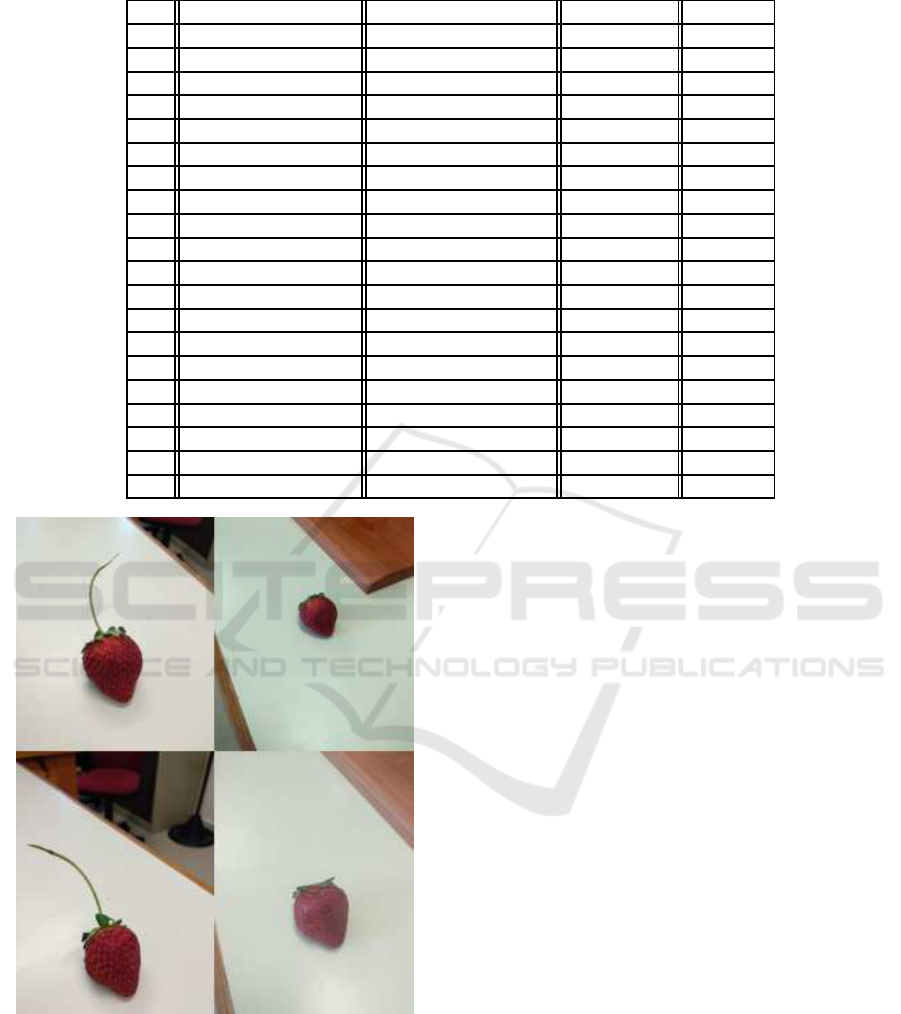
Table 1: Results of the experiment.
No Position error in cm Correct Grasp Correct Cut Damage
1 (0,0,0) yes yes no
2 (0,0.3,0) yes yes no
3 (0,0.3,0) yes yes no
4 (0.4,1.3,0.8) wrong position no grasp no grasp
5 (1,1,0) yes yes no
6 (1,1,0) at the edge of fingers yes no
7 (0.5,0,0.3) yes yes no
8 (2,0,0.3) out of workspace no grasp no grasp
9 (0,0.3,0) yes yes no
10 (1,0.3,0) at the edge of fingers yes no
11 (0.5,0,0) yes yes no
12 (1,0.8,0.4) a bit sideways yes no
13 (1,0,0) yes yes no
14 (0,0,0) yes yes no
15 (0,0.2,0.3) yes yes no
16 (0.3,0.1,0.1) yes yes no
17 (0.3,0,0) yes yes no
18 (0.1,1,0) sideways no grasp no grasp
19 (0.4,0.1,0) yes yes yes
20 (0,0,0) yes yes no
Figure 12: At the left column is the strawberry before the
harvest in both sides and at the right the respective after the
harvest.
ACKNOWLEDGEMENTS
We would like to thank the staff of Georion Ltd., and
especially Mr. F. Papanikolopoulosand Dr. E. Tsorm-
patsidis for providing fresh strawberries to conduct
the experiments.
REFERENCES
Bieber, A. (2016). Adaptive claw/gripper evolution.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Dimeas, F., Sako, D., Moulianitis, V., and Aspragathos, N.
(2013). Towards designing a robot gripper for efficient
strawberry harvesting.
Dimeas, F., Sako, D. V., Moulianitis, V. C., and Aspra-
gathos, N. A. (2015). Design and fuzzy control of
a robotic gripper for efficient strawberry harvesting.
Robotica, 33(5):1085–1098.
Feng, G., Qixin, C., and Masateru, N. (2008). Fruit detach-
ment and classification method for strawberry harvest-
ing robot. International Journal of Advanced Robotic
Systems, 5(1):4.
Hayashi, S., Shigematsu, K., Yamamoto, S., Kobayashi, K.,
Kohno, Y., Kamata, J., and Kurita, M. (2009). Eval-
uation of a strawberry-harvesting robot in a field test.
105:160–171.
Hemming, J., Bac, C. W., van Tuijl, B. A. J., Barth, R.,
Bontsema, J., Erik, and Pekkeriet (2014). A robot for
harvesting sweet-pepper in greenhouses.
Klaoudatos, D., Moulianitis, V., and Aspragathos, N.
Strawberry harvesting robotic system. https://youtu.
be/S8lzHjZTQl4.
Li, X., Li, J., and Tang, J. (2018). A deep learning method
for recognizing elevated mature strawberries. In 2018
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
444

33rd Youth Academic Annual Conference of Chinese
Association of Automation (YAC), pages 1072–1077.
Luo, L., Tang, Y., Lu, Q., Chen, X., Zhang, P., and Zou,
X. (2018). A vision methodology for harvesting robot
to detect cutting points on peduncles of double over-
lapping grape clusters in a vineyard. Computers in
Industry, 99:130 – 139.
Narendra, V. G. and Hareesha, S. (2010). Quality inspec-
tion and grading of agricultural and food products by
computer vision- a review. International Journal of
Computer Applications, 2.
Nguyen, T. T., Vandevoorde, K., Kayacan, E., Baerde-
maeker, J. D., and MeBioS, W. S. (2014). Apple de-
tection algorithm for robotic harvesting using a rgb-d
camera.
Otsu, N. (1979). A threshold selection method from gray-
level histograms. IEEE Transactions on Systems,
Man, and Cybernetics, 9(1):62–66.
Puttemans, S., Vanbrabant, Y., Tits, L., and Goedem´e, T.
(2016). Automated visual fruit detection for harvest
estimation and robotic harvesting. In 2016 Sixth In-
ternational Conference on Image Processing Theory,
Tools and Applications (IPTA), pages 1–6.
Slaughter, D. C. and Harrell, R. C. (1987). Color vision in
robotic fruit harvesting.
Stajnko, D., Lakota, M., and Hoˇcevar, M. (2004). Estima-
tion of number and diameter of apple fruits in an or-
chard during the growing season by thermal imaging.
Computers and Electronics in Agriculture, 42(1):31 –
42.
Suzuki, S. et al. (1985). Topological structural analy-
sis of digitized binary images by border following.
Computer vision, graphics, and image processing,
30(1):32–46.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proceed-
ings of the 2001 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition. CVPR
2001, volume 1, pages I–I.
Wiedemeyer, T. (2014 – 2015). IAI Kinect2. https://github.
com/code-iai/iai\
kinect2. Accessed June 12, 2015.
Xiang, L., Echtler, F., Kerl, C., Wiedemeyer, T., Lars,
hanyazou, Gordon, R., Facioni, F., laborer2008, Ware-
ham, R., Goldhoorn, M., alberth, gaborpapp, Fuchs,
S., jmtatsch, Blake, J., Federico, Jungkurth, H.,
Mingze, Y., vinouz, Coleman, D., Burns, B., Rawat,
R., Mokhov, S., Reynolds, P., Viau, P., Fraissinet-
Tachet, M., Ludique, Billingham, J., and Alistair
(2016). libfreenect2: Release 0.2.
Yang, L., Dickinson, J., Wu, Q. M. J., and Lang, S. (2007).
A fruit recognition method for automatic harvesting.
In 2007 14th International Conference on Mechatron-
ics and Machine Vision in Practice, pages 152–157.
Development of an Experimental Strawberry Harvesting Robotic System
445
