
Combining Onthologies and Behavior-based Control for Aware
Navigation in Challenging Off-road Environments
Patrick Wolf, Thorsten Ropertz, Philipp Feldmann and Karsten Berns
Robotics Research Lab, Dep. of Computer Science, TU Kaiserslautern, Kaiserslautern, Germany
Keywords:
Off-road Robotics, Ontology, Behavior-based Control, Navigation, Simulation.
Abstract:
Autonomous navigation in off-road environments is a challenging task for mobile robots. Recent success
in artificial intelligence research demonstrates the suitability and relevance of neural networks and learning
approaches for image classification and off-road robotics. Nonetheless, meaningful decision making processes
require semantic knowledge to enable complex scene understanding on a higher abstraction level than pure
image data. A promising approach to incooperate semantic knowledge are ontologies. Especially in the off-
road domain, scene object correlations heavily influence the navigation outcome and misinterpretations may
lead to the loss of the robot, environmental, or even personal damage. In the past, behavior-based control
systems have proven to robustly handle such uncertain environments. This paper combines both approaches
to achieve a situation-aware navigation in off-road environments. Hereby, the robot’s navigation is improved
using high-level off-road background knowledge in form of ontologies along with a reactive, and modular
behavior network. The feasibility of the approach is demonstrated within different simulation scenarios.
1 INTRODUCTION
What was long assumed to be futuristic will soon
characterize our everyday life: The vision of self-
driving cars—especially in the on-road domain—has
taken manifest form in recent years (Thrun et al.,
2006), (Ziegler et al., 2014). The development of au-
tonomous road vehicles profits from the structured-
ness of the environment and the availability of cer-
tain regulations and standards. This greatly simplifies
the situation assessment for autonomous vehicles. In
contrast, the off-road sector with frequently chang-
ing environmental conditions and as well as highly
unstructured, rough, and dangerous surroundings still
remains an unsolved area of research. Autonomous
vehicles operating off-road are constantly exposed to
unpredictable situations as for instance poor visibil-
ity caused by rain, dust, or mud. Additionally, prop-
erties of scene objects, as rocks, tree trunks, or ver-
satile surface conditions, as well as the correspond-
ing object correlations have a huge impact on the
traversability estimation and navigation. Behavior-
based systems (BBS) have shown to be suited for
handling such difficult environments by relying on a
modular design with sophisticated arbitration mecha-
nisms (Berns et al., 2011). The research area of artifi-
cial neural networks offers promising results in image
recognition (Valada et al., 2017) which is of indis-
pensable importance in the field of mobile robotics.
Unfortunately, pure reactive sensor data-based pro-
cessing limits the set of possible actions since not all
navigation relevant factors are perceivable. In con-
trast, a human operator relies heavily on world knowl-
edge, which is used to achieve highly advanced nav-
igation maneuvers and to handle uncertain scenarios
with incomplete information.
Through applying semantic knowledge models,
autonomous robots can exploit human experience.
This offers an enormous advantages for task plan-
ning and navigation since strategies can be indepen-
dently selected on a corresponding scenario. Further-
more, sensor data analysis may utilize such experi-
ence to identify faulty signals. An appropriate tech-
nology incorporate the background knowledge is the
Semantic Web Technology (SWT). It structures in-
formation in a semantic model and was originally
developed to handle the rapidly growing amount of
data on the world wide web to make it accessible to
search engines and likewise (Hitzler et al., 2009). The
SWT is based on so-called ontologies. Ontologies are
knowledge models used to link information with se-
mantic relationships. They are suited for capturing,
exchanging, and deriving information in a machine-
processable as well as human-understandable form.
Wolf, P., Roper tz, T., Feldmann, P. and Berns, K.
Combining Onthologies and Behavior-based Control for Aware Navigation in Challenging Off-road Environments.
DOI: 10.5220/0007934301350146
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 135-146
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
135

Therefore, ontologies are predestined be used as a
semantic knowledge base to acquire information for
situation-aware navigation in off-road environments.
This paper provides a novel methodology for off-
road navigation by combining behavior-based control
and ontologies. It is structured as follows: Section 2
presents an overview of state of the art applications
of ontologies in robotics. Next, an overview to the
integrated Behavior-Based Control architecture iB2C
(Section 3) is given, which was used for robot control
and ontology integration. An off-road ontology, the
Scene INterpretation Engine (SINE), is suggested in
Section 4. Section 5 demonstrates the integration and
interaction of a behavior-based robot controller and
SINE. Experimental results are given in section 6,
where the approach was tested in simulation. Sec-
tion 7 summarizes the presented approach and con-
cludes.
2 RELATED WORK
The deliberation of autonomous systems is a highly
active research area of robotics. Hereby, deliberation
aims at enabling a robot to fulfill its task in a variety
of environments. It has an impact on acting, learn-
ing, reasoning, planning, observing, as well as the
monitoring of the surroundings (Ingrand and Ghal-
lab, 2017). Hereby, knowledge modeling with on-
tologies is a well known technique. The Open Mind
Common Sense Project (OMICS) (Gupta et al., 2004)
focuses the area of indoor robotics and provides a
knowledge base which was created by more than 3000
volunteers and includes more than 1.1 million state-
ments. Similarly, the KnowRob-Map (Tenorth et al.,
2010) enables autonomous household robots to per-
form complex tasks in indoor environments. Spatial
and encyclopedic information about objects and their
environment enables a robot to determine the type
and function of a detected object. Another mapping
approach, the multiversal semantic map (MvSmap)
extends metric-topological maps by semantic knowl-
edge (Ruiz-Sarmiento et al., 2017). Through the iden-
tification of object and room types mobile robots can
distinguish working environments as kitchen, living
rooms, and bedrooms based on the detected objects
located in the room.
There exist also various approaches using on-
tologies for outdoor scene descriptions. Record-
ings of outdoor scenarios can be described with the
help of an ontology in sentences of natural language.
Here, primitive units are extracted from an image by
stochastic processes. Attributes as well as relation-
ships of the units are evaluated by an ontology based
on predefined proposition. A pool of sentence tem-
plates can be selected and enhanced according to the
theme of the visual content (Nwogu et al., 2011).
Such approaches have shown to provide promising
results and have been further investigated in sev-
eral works (Farhadi et al., 2009), (Yao et al., 2010),
(Kulkarni et al., 2011). It is especially important that
a complete scenario catalogue exists for every task a
vehicle should fulfill to achieve a formal approval of a
vehicle. Nonetheless, the number of critical scenarios
is hardly manageable for a vehicle with a high degree
of automation. Therefore, an ontology as knowledge-
based system for the generation of traffic scenarios
and testing of automated vehicles in road traffic is
suggested by the authors of (Bagschik et al., 2017).
It supports the identification of possible scenario per-
mutations in road traffic scenarios and is intended to
automate the creation and testing of road traffic sce-
narios. The method uses an ontology along rules of
the Semantic Web Rule Language (SWRL) (Horrocks
et al., 2004) to determine motion maneuvers. Thus, a
Semantic Web Rule (SWR) was implemented in the
ontology for each maneuver, while entities and rules
were generated by permutation and logical thinking.
The assessment of the current risk-level is an im-
portant development aspect for mobile systems. Un-
fortunately, pure object recognition does not provide
sufficient information to safely operate a robot since
type and behavior of objects are of great importance
for the assessment of the degree of hazard. In the
past, ontologies have been also used to target the risk
assessment of road scenarios of autonomous vehicles
(Mohammad et al., 2015). The approach focuses the
problem of assigning a semantic meaning to a per-
ceived environment similar to humans who utilize
their gathered experience. Therefore, inference rules
of the SWRL are formulated in the ontology to assign
risk factor classes to the objects. The methodology
uses multiple sets of rules for the four risk classes
(high risk, medium risk, low risk, and no risk) of a
pedestrian crossing a road. The current risk is de-
rived based on risk assessment knowledge of a driver
and ontology information. Thereby, a hazardous sce-
nario where a pedestrian crosses a road demonstrated
the feasibility of the approach. Thus, the behavior of
the pedestrian is essential for the assessment of the
risk. On the one hand, the pedestrian could stay on
the sidewalk and move away from the road leading to
a low risk. On the other hand, the pedestrian could
also move carelessly towards the road yielding a high
risk. In addition, environmental factors as visibility
and weather influence the risk assessment and have to
be considered for the risk determination.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
136

3 BEHAVIOR-BASED CONTROL
The integrated Behavior-Based Control (iB2C) archi-
tecture (Proetzsch, 2010), (Ropertz et al., 2017) has
been developed at the Robotics Research Lab of TU
Kaiserslautern. The underlying idea is that the over-
all system behavior emerges from the interaction of
rather simple behavior components which realize only
little functionality. In iB2C, there exist different basic
component types for control and perception. Behav-
ior modules are used for command execution, while
Percept modules are suited for sensing and data pro-
cessing by considering respective data quality infor-
mation (see Fig. 1).
s
Behavior
i
a
r
~e
~u
(a) Behavior B = ( f
a
,F).
s
Percept
i
a
r
~e
~u
(b) Percept P = ( f
a
, f
p
u
,F).
Figure 1: Basic iB2C units (Ropertz et al., 2017).
BBS are robust against environmental changes due
to the partially overlapping functionality and the abil-
ity to adapt to the surroundings by using dynamic ar-
bitration. Contradicting control and perception infor-
mation is resolved through fusion modules which co-
ordinate the interaction of network components and
combine parallel data flows. All iB2C components
provide a standardized common interfaces consisting
of stimulation s and inhibition i, which allows to ad-
just the maximum relevance of a module in the cur-
rent system state. The target rating output r indi-
cates the contentment of the behavior and is defined
by the activity function f
a
(~e). The behavior’s activity
a = min(s · (1 − i), r) reflects the actual relevance of
the behavior in the current system state and is used
by fusion behaviors to perform the arbitration process
or to activate or inhibit other network elements. In
addition, each behavior component provides an appli-
cation specific interface consisting of the input vec-
tor ~e and output vector ~u containing arbitrary control
and sensor data. Thereby, the output vector is de-
fined by the transfer function F(~e). For coordination
purposes, there are different fusion approaches prede-
fined, namely the Maximum Fusion and the Weighted
Average Fusion. The former implements a winner-
takes-all methodology, where the behavior with high-
est activity, or respectively best data quality, gains the
control. The latter admits influence with respect to the
total activity ratio of every connected module.
4 OUTDOOR ONTOLOGY
DESIGN
In the following, the ontology design for an out-
door scene description tailored to autonomous mobile
off-road robots in rough environments is presented.
Thereby, the risk assessment of the current scene is
emphasized.
4.1 Entity Identification
A first step in ontology design is the identification
of entities which influence the autonomous off-road
navigation. This requires the modeling of various
decision-relevant factors that enable risk assessment.
Hereby, the entity determination needs to be complete
and all relevant aspects have been considered. Un-
fortunately, this is hard to achieve due to the scene
complexity and uncertainty in off-road environments.
To illustrate those issues, a simple forest path and its
specific characteristics are examined in more detail
(Fig. 2). Hereby, an initial set of assumptions is col-
lected, which is used for modeling rules of the ontol-
ogy.
Figure 2: Forest path with obstacle.
The scene can be semantically segmented into two
major classes: pathway and off-track. This simplis-
tic segmentation is especially meaningful for the risk
assessment of different navigation scenarios. In gen-
eral, it is assumed that a path has a better traversability
than driving off-road. A pathway should not contain
large obstacles and its surface is often flat. Thus, a
robot should navigate along a path as long as possi-
ble. Likewise, there is a higher navigation risk beside
the paths due to a higher probability of large obsta-
cles and rougher surfaces. Additionally, surface ma-
terial properties are relevant for the risk assessment
of a situation and have to be regarded. The robot’s
traction differs strongly while driving on gravel, sand,
or forest road. Furthermore, the type of path geome-
tries is relevant. Exemplary classes for the ontology
are curve, straight, uphill, downhill, and flat. A hu-
man driver assess driving situations based on accumu-
lated experience and learned knowledge. Therefore,
Combining Onthologies and Behavior-based Control for Aware Navigation in Challenging Off-road Environments
137

occluded regions are approached at a lower velocity,
as for instance an area behind a hill top. Other en-
vironmental factors as bad weather and illumination
changes also trigger more cautious driving behavior.
Corresponding types of precipitation that can affect
the risk assessment are for instance fog, snow, and
rain. However, since thy can influence not only vis-
ibility but also the road surface, e.g. by forming icy
roads, the current temperature is also included in the
class descriptions of the ontology. A very important
and potentially most dangerous source of danger in a
scene are obstacles. Therefore, different types of ob-
jects have been identified for risk assessing ontology.
The example presented in Fig. 2 shows a forest
road section, where a part is blocked by a fallen tree
stump. Such obstacles may present a risk depending
on their size, the construction of the vehicle’s chassis,
and the current velocity. Identified stationary objects
include stones and fallen tree stumps, trees, bushes,
steps, and tall grass. The class description for tall
grass was included since it often causes undesirable
effects during navigation. Usually, mobile off-road
robots rely on local obstacle maps for near field nav-
igation as metric or grid maps to determine occu-
pied areas or vehicle collisions with the underground
(Wolf et al., 2018b). These obstacle maps are usu-
ally generated using geometric information provided
by distance data. Therefore, obstacles are regarded
as blocking without considering semantic knowledge.
E.g.tall grass is recognized as a barrier, while the in-
corporation of semantic information would allow the
robot to pass through the area. Similar cases are
avoided and availability is increased without decreas-
ing safety using modeled knowledge.
Usually, autonomous systems expose nearby hu-
mans to a very high risk. Therefore, they are sepa-
rately considered by the ontology and classified as dy-
namic objects in order to keep the risk as low as possi-
ble. Classes corresponding to moving objects strongly
increase the risk potential for a scene. Additionally,
the motion direction of objects is explicitly modeled
within the ontology as class descriptions. This en-
ables the evaluation of the definite high risk poten-
tial of an mobile object as suggested by (Mohammad
et al., 2015).
In addition, class descriptions for the identified
risk and a steering direction recommendation are de-
fined to reasonably react to potential risks in the
scene. The risk is categorized into four classes, no
risk, low risk, medium risk and high risk. The steer-
ing direction recommendation consists of two class
descriptions: left steering and right steering.
4.2 Class Hierarchy
The entities and properties identified in Section 4.1
were divided into groups of membership and mod-
eled within a class hierarchy (Fig. 3). Thereby, the
editing tool Prot
´
eg
´
e
1
(Musen, 2015) was used to cre-
ate the ontology. It provides an overview of the class
hierarchy.
Figure 3: The ontology class hierarchy for off-road scene
risk assessment and a steering direction proposal.
Risk and Steering Recommendation summarize
the entities provided as derived results to the robot
control system. Risk is specified in four subclasses:
NoRisk, LowRisk, MediumRisk, and HighRisk. The
Steering Recommendation class contains two sub-
classes Left and Right. Risk Assessment is the main
class and summarizes the other class descriptions.
Subclasses of Risk Assessment include the Speed re-
lated risk sources previously identified. Likewise, the
Surface Environmental Risk class summarizes under-
ground surfaces of the environment. Similarly, the
class Environmental Risk describes the risk based
on environmental influences such as visibility and
weather conditions. Risk From Objects describes the
most important subgroup of risk factors: all types of
objects and their properties.
The class Risk From Objects (Fig. 3) is further
refined in Fig. 4. It describes obstacles together
with their attribute class descriptions including the
Type of Objects, which divides the type of objects
into two categories. The first category are ground
objects which are described by the Ground class.
Its specified class descriptions are Path and Path-
Side classes. The individuals of the class descrip-
tions can be populated with the attributes of Sur-
1
https://protege.stanford.edu/
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
138
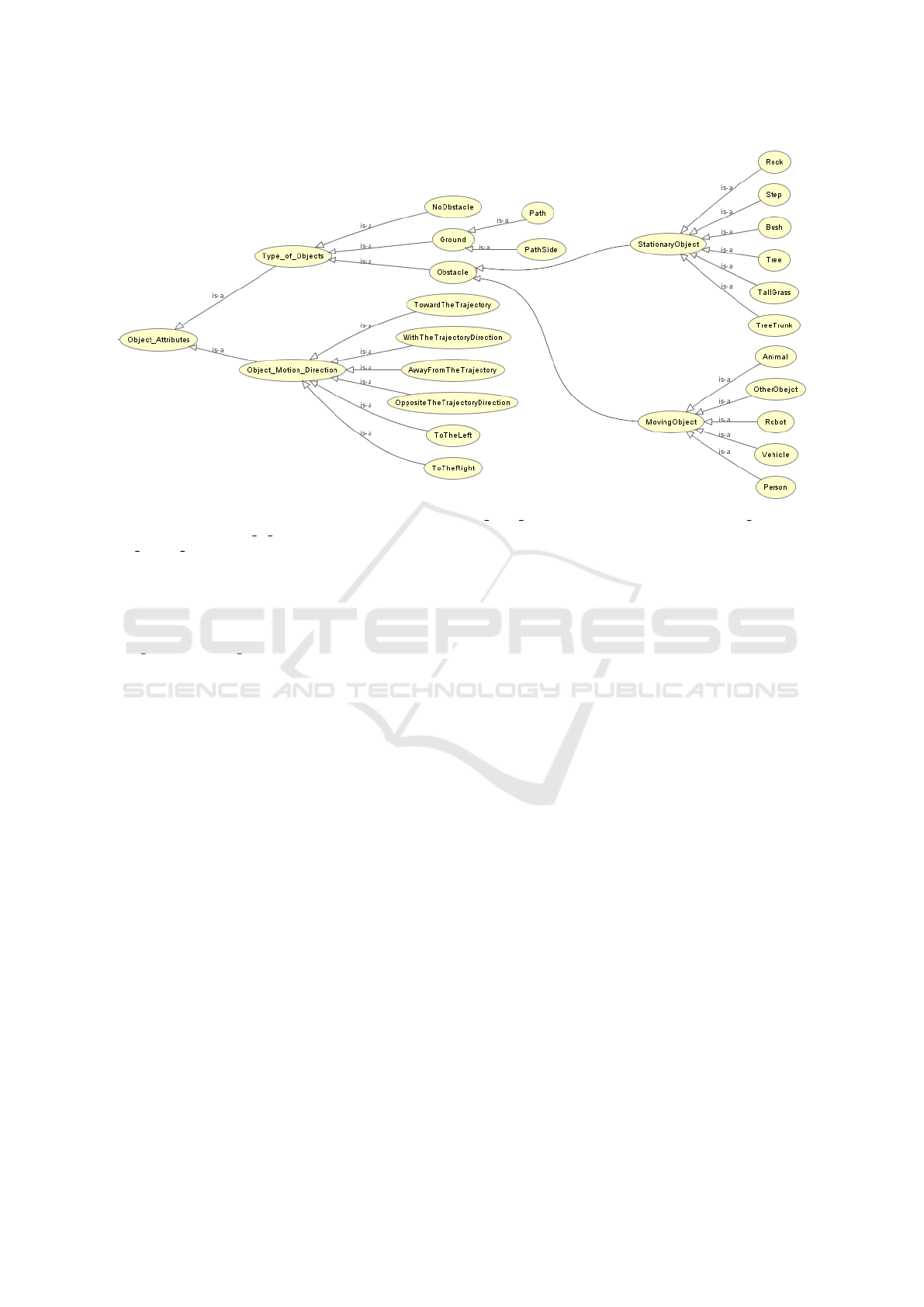
Figure 4: The ontology class hierarchy for the subclass group Risk From Objects with the subclass groups Object Attributes.
It contains the class Type of Objects which combines the object types for Ground, Obstacles, and NoObstacles. The class Ob-
ject Motion Direction contains a collection of attributes for the directions of movement: TowardTheTrajectory, AwayFrom-
TheTrajectory, WithTheTrajectory, ToTheLeft, ToTheRight, WithTheTrajectoryDirection, and OppositeTheTrajectoryDirec-
tion. The subclass Ground encapsulates the entities Path and PathSide. Obstacle specifies the classes MovingObject and
StationaryObject. Motion objects are Person, Robot, Animal, Vehicle, and OtherObject. Stationary objects are TreeTrunk,
Tree, Bush, Step, TallGrass, and Rock.
face Environmental Risk using object property rela-
tions. The second category are Obstacle classes.
Here, MovingObjects and StationaryObjects are dis-
tinguished. StationeryObjects includes the class de-
scriptions TreeTrunk, Tree, Bush, Step, TallGrass, and
Rock. The entities Person, Robot, Animal, Other-
Object, and Vehicle have been assigned to the class
MovingObjects. Robot is listed separately because it
has all properties of the class MovingObjects with-
out being an obstacle. Objects which have been not
classified through an object recognition system are
assigned to the OtherObject class in this knowledge
model. This class is interpreted as dangerous with re-
spect to risk assessment. Thus, a worst case assump-
tion for unknown objects is applied. The class NoOb-
stacle, which is on an equal hierarchical level of as
Ground and Obstacle serves to describe a scene were
no obstacle exists. This is required due to the open
world assumption of the ontology. Thus, a class as
NoObstacle which is disjunctive to the Obstacle class
can be used to paraphrase the absence of a statement.
In contrast, a closed world assumption can simply be
implicitly inferred from the absence of a statement.
4.3 Object and Data Properties
Additional predicates are required to describe the re-
lationships between the recognized individuals and
their specific characteristics in order to implement
a situation-conscious scene description called asser-
tional knowledge. Object properties define entity-data
correlations and provide attributes of individuals. In
the suggested approach, object and data properties are
separated into functional and non-functional charac-
teristics. In the first case, properties of the assertional
box can be derived from existing knowledge about the
classes and their detected attributes with the help of
rules defined in ontology. In the second case, prop-
erties of non-functional characteristics serve to note
perceived attributes of the scene. These functional re-
lationships build on each other to derive query-able
results for the risk assessment and a steering direction
suggestion to avoid risks.
4.4 Rules of the Ontology
SWRL is especially suitable for expressing complex
relationships in ontologies by recursively connecting
the described rules. Due to the importance of this
property, SWRL was selected as the expressive rule
language. Thereby, recognized factors are semanti-
Combining Onthologies and Behavior-based Control for Aware Navigation in Challenging Off-road Environments
139

cally linked in order to make a meaningful statement.
Ontology rules are defined to derive statements which
in turn are needed for the evaluation of rule definitions
on a higher level.
An example of the functional object property
hasHighRisk is provided. It assigns an instance of the
class HighRisk to the robot individual if the following
rule applies:
Robot(?r) ∧ Obstacle(?o) ∧ HighRisk(?hr)
∧hasSa f etyDistance(?o, f alse)
∧isBypassableOnRoad(?o, f alse)
∧isBypassableO f f Road(?o, f alse)
∧isOverdriveable(?o, f alse)
→ hasHighRisk(?r, ?hr)
(1)
Rule (1) is fulfilled if all atoms in the rule body are
fulfilled. In this case, all data properties required to
fulfill the rule body are of functional character. Next,
the rule is used to propagate a possible trace until the
lowest level is reached. Therefore, a rule that derives
the data property hasSa f etyDistance = f alse of an
obstacle is defined as
Robot(?r) ∧ Ground(?g) ∧ Obstacle(?o)
∧hasGoodVisibility(?r,true)
∧isSlippery(?g, f alse)
∧HighSpeed(?v)
∧hasSpeedClassi f ication(?r, ?v)
∧hasDistance(?o,?d)
∧hasGrownDepth(?o,?gd)
∧swrlb : divide(?hal f gd, ?gd,2)
∧swrlb : subtract(?sd, ?d, ?hal f gd)
∧swrlb : lessT han(?sd,25)
→ hasSa f etyDistance(?o, f alse)
(2)
The body of rule (2) requires that there is an instance
of Robot, Ground, and Obstacle present. In addi-
tion, the functional data property hasGoodVisibility
has to be true for the robot. The functional data prop-
erty isSlippery is expected to be false for the ground
instance. The safety distance to be maintained is
doubled in the case that one of both data properties
fulfills the complementary statement. Additionally,
speed classification is required to determine the re-
quired safety distances. Therefore, the rule body asks
for an instance of HighSpeed with the object prop-
erty hasSpeedClassification. This shows that there
exist several rules for hasSafetyDistance in order to
consider all possible cases. Furthermore, hasGrown-
Depth queries the size of the obstacle in the direc-
tion of travel and subtracts the half value from the
query distance of hasDistance between the obstacle
and the robot. It further checks whether the result is
smaller than the required distance of 25 m to maintain
the safety distance.
The above rule requires functional relationships of
other rule-based object and data properties for evalu-
ation. In this case, the rules (3) – (5) apply.
Robot(?r) ∧ OptimalWeather(?wc)
∧hasWeatherCondition(?r, ?wc)
→ hasGoodVisibility(?r,true)
(3)
The data property hasGoodVisibility requires further
rule definitions for the classes Weather Condition and
Visibility Condition.
Robot(?r) ∧ OptimalWeather(?wc)
∧Ground(?g)∧ Asphalt(?m)
∧hasWeatherCondition(?r, ?wc)
∧hasGroundMaterial(?g,?m)
→ isSlippery(?g, f alse)
(4)
The same applies to the isSlippery data property.
Here, rules for Weather Condition, Ground Material,
and Ground Quality as well as their different com-
binations have to be defined. Additionally, the rule
temperature further increases the overall rule count.
MovingOb ject(?m) ∧ HighSpeed(?hv)
∧hasSpeed(?m, ?v)
∧swrlb : greaterT han(?v, 8.33333)
→ hasSpeedClassi f ication(?m,?hv)
(5)
Last but not least, the property hasSpeedClassifica-
tion requires the assignment of a speed class to a
MovingObject. Here, the example for high speed is
depicted.
The given example clearly shows the complexity
of relationships and the large number rules which is
required for scene analysis. SWRL rules require to be
represent as conjunctions of atoms, which forces the
formulation of another set of rules for every disjunc-
tion of a logical statement. The open world assump-
tion implies that a rule has to be modeled for fulfill-
ment and in addition explicitly for the non-fulfillment.
The latter cannot be implicitly closed from the inverse
fulfillment of a rule, which leads to a huge amount
of rules. This simple scenario already contains more
than 200 SWRL rules.
4.5 Scene Interpretation Engine
The presented off-road ontology is part of the Scene
Interpretation Engine (SINE). SINE serves as knowl-
edge database along with other world knowledge as
for instance OpenStreetMap data (Fleischmann et al.,
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
140

2016). It enables an independent perception and con-
trol design since the ontology retrieves sensor data
through generic and standardized interfaces (Sch
¨
afer
et al., 2008). Therefore, arbitrary sensor data are
transformed into a common representation for data
exchange. This enables the consideration of various
information sources as sensor-based object segmenta-
tion, or simulation data. Furthermore, this fosters ex-
tensibility as there are further sophisticated learning
approaches expected to be available in near future.
5 BEHAVIOR-BASED
ONTOLOGY ASSESSMENT
This section discusses the incorporation of the pre-
sented off-road ontology SINE into the behavior-
based robot control architecture REACTiON for ro-
bust off-road navigation (Wolf et al., 2018a). It
is implemented using iB2C and features data qual-
ity driven perception processes. Data is evaluated
through a single- and multi-sensor quality assessment
(Ropertz et al., 2017), which adapts dynamically to
disturbances. Furthermore, reactive low-level (Rop-
ertz et al., 2018a) and fail-safe systems (Wolf et al.,
2018a) ensure a safe and robust navigation in clut-
tered environments.
Hardware
Perception
Knowledge
Ontology
Control
Low Level
Sensors
Data
Velocity
Steering
Risk
Steering
Object Detection
Reasoning
Queries
Entities
Figure 5: Conceptual representation for ontology-control
interaction.
A simplified scheme for ontology-control interac-
tion is depicted in Fig. 5. The hardware abstraction
provides sensor data processed by the robot’s percep-
tion. Object detection systems like a deep learning al-
gorithm share information through standardized and
common scene interfaces. It transmits detected enti-
ties including their positions, dimensions, velocities
and other non-functional object and data properties
to the knowledge database. The ontology processes
scene data as classified entities, obstacles, path sec-
tions, and individuals of the corresponding class de-
scription. Further data are triple axioms in the as-
sertional box of the ontology as well as object and
data properties which are read directly from the scene.
Newly created axioms of ontology are processed in-
cluding their terminological knowledge and the de-
fined rules for the properties with functional charac-
ter. Finally, conclusions are derived with the help of
a reasoner. The ontology uses queries for risk level
determination and steering recommendation requests.
The results are transmitted to the control system of the
robot which performs different safety checks as col-
lision prediction, roll-over avoidance, and centrifugal
acceleration limitation. Here, the ontology informa-
tion about the safety state of the system is transformed
into a behavior signal and is considered for behavior
network arbitration. In contrast to the given represen-
tation, a standard robot control system would directly
connect perception and control for motion generation.
An example for ontology interaction with the robot’s
low-level control depicted in Fig. 6.
Hardware
Velocity
Slow Down
Fwd.
Slow Down
Slow Down
Stop
Centrif.
Accel.
Onotology
Fwd. Risk Bwd. Risk
Bwd.
Figure 6: Low level collision avoidance incorporates ontol-
ogy risk knowledge.
The low-level safety system (Ropertz et al.,
2018b) uses different behaviors for safety state eval-
uation. A velocity provided by a higher level con-
troller is modified through the Slow Down Forward,
Slow Down Backward, and Centrifugal Acceleration
units. The robot’s resulting Velocity is determined by
the Slow Down fusion, while its default behavior is
Stop. Finally, the speed information is processed by
the Hardware interface.
In the extended version, the Ontology assesses
the control system through additional behaviors. The
Forward Risk and Backward Risk behaviors may ad-
just the velocity based on the determined risk level to
minimize a potential risk caused by the environment.
Additionally, they are capable of disabling the respec-
tive slow down behavior if there is no risk present.
This is meaningful in the case of a spurious obsta-
cle detection, which may occur in the presence of tall
Combining Onthologies and Behavior-based Control for Aware Navigation in Challenging Off-road Environments
141

grass, light vegetation, or likewise.
Similarly, SINE may adapt the robot’s evasion
behaviors according to the risk factor and steering
recommendation. Therefore, potential risks can be
avoided at an early stage of navigation. Thus, the
ontology may control the robot completely or can
partially suggest control values to the low level con-
troller.
6 EXPERIMENTS
The presented ontology was tested in various simula-
tion scenarios. Hereby, the robot’s driving behavior
using a behavior controller, the pure ontology, as well
as a hybrid control approach for navigation were com-
pared. Each, the navigation test was repeated and the
results compared to each other.
The control software and the onotology were im-
plemented using Finroc, a C++/Java-based robot con-
trol framework with real-time capabilities, zero-copy
implementations, and lock free data exchange (Re-
ichardt et al., 2012).
The scenarios were tested in the Unreal Engine
(UE 4) which was used for simulation. Finroc and the
UE 4 share data via an engine plugin. Different tests
were done using the simulated robot GatorX855D of
the RRLab, TU Kaiserslautern. In addition to the sen-
sor setup as described by (Ropertz et al., 2017), a ray-
trace actor of the Unreal Engine was used as object
detector. Therefore, standard sensor data for robot
control were available. Additionally, SINE was able
to operate with perfect classification data. This en-
abled the comparison of the robot’s standard naviga-
tion behavior, ontology-based navigation results, and
the combination of both approaches without depen-
dencies on the actual classifier.
6.1 Simulated Object Detector
The simulated object detector is a perfect classifica-
tor. On the one hand side, it is used to test the onotol-
ogy with undisturbed sensor data which prevents un-
desired effects on the final control result. On the other
hand side, it enables the testing with arbitrary proper-
ties of detected objects. Even if current deep learning
approaches are very promising, they are not yet ca-
pable of detecting every individual aspect of a scene.
Nonetheless, it can be assumed that future learning
approaches will be powerful enough to test the pre-
sented onotology framework with real sensor data.
The object detector is implemented as a specifica-
tion of the UE 4 actor class. It is placed on the robot
next to the top stereo camera as shown in Fig. 7a. It
(a) Line trace object detector.
The blue lines indicate a visi-
ble, red lines a hidden object.
(b) Stationary obstacle
(top). Volume-based
entity (bottom).
Figure 7: Entities in the simulation environment.
has the same field of view as the corresponding stereo
camera system. Therefore, only objects in the visible
range of the robot are regarded by the ontology. The
ray-trace actor provides detailed information about
visible objects which can be arbitrary tagged. For
this purpose an invisible volume body in the form of
a frustum is used, which covers the camera’s field of
vision. The frustum is measured by the render depth
and the aperture angle of the viewing cone of a cam-
era actor. During the simulation only the objects that
overlap with the frustum have to be found out in order
to read out the visible scene.
All objects to be detected are actor classes them-
selves like the obstacles contained in the scene
(Fig. 7b, top). A line trace is used to check whether
the imaginary line between the object detector and the
object is free of collisions to check the visibility. Ad-
ditional rectangular volume bodies were placed on the
respective areas in order to recognize path and path
side sections in the simulation (Fig. 7b, bottom). Ev-
ery type of object was additionally labeled with prop-
erties to be recognized and processed by the object
detector. Further information as height, width, depth,
location, and speed of the detected objects can be read
directly from their attributes. Specialized functions
provide more data as distance of objects to the robot,
their motion direction, location of object edges, dis-
tances to their lateral obstacles, and their location with
respect to the path or path sides.
6.2 Environment and Scenarios
Multiple scenarios were tested in simulation to
demonstrate the different aspects of the onotology and
its impact on the robot control. Therefore, the robot
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
142

navigated in a forest environment and completed six
different scenarios. Each scenario was repeated three
times with a different control setup (behavior-based,
ontology, combined). An overview to the experimen-
tal results is available in Fig. 8. Additionally, recorded
trajectories, velocities, risk level, and steering recom-
mendations are presented.
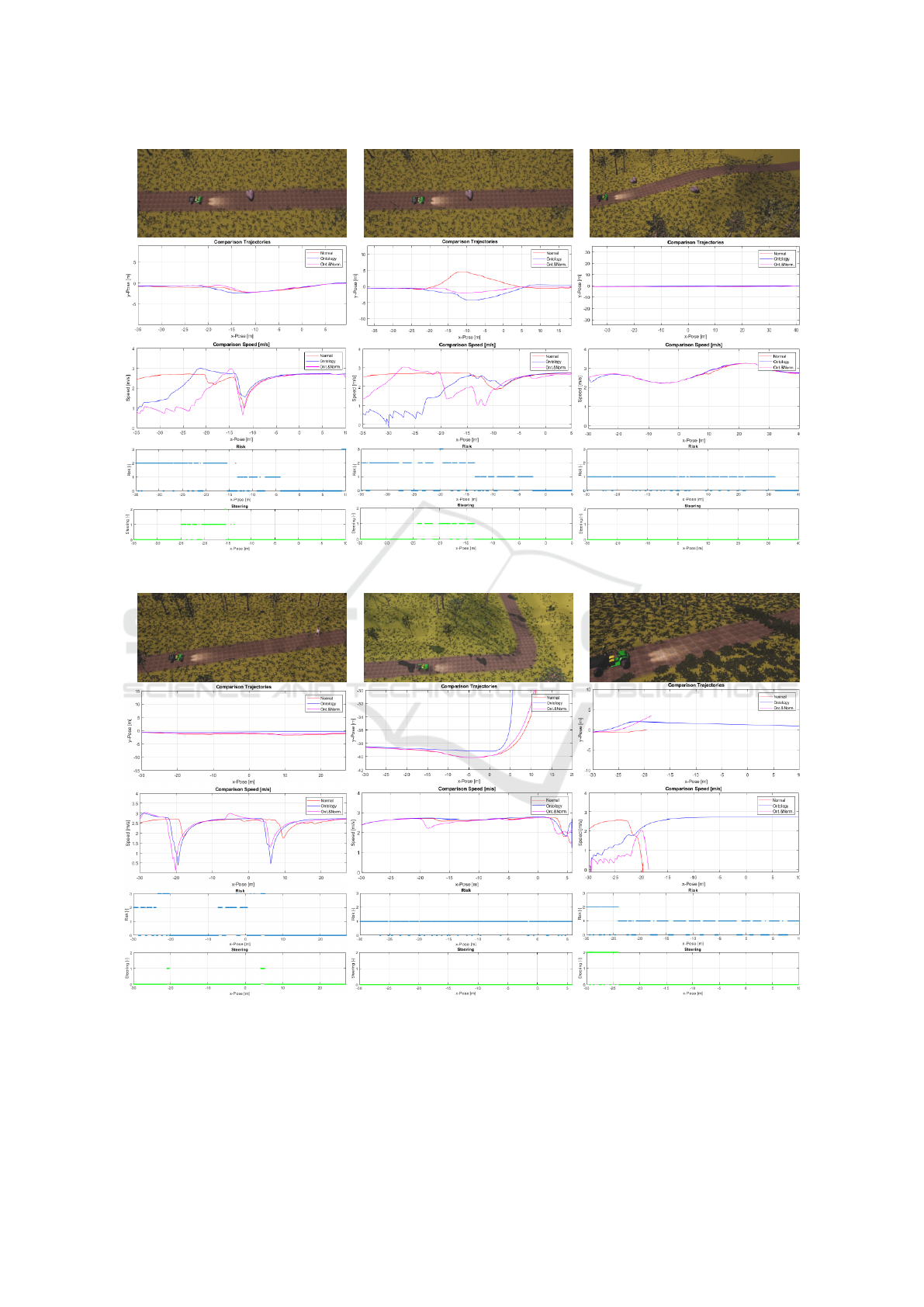
Scenario 1: Passing an Obstacle. The first sce-
nario was passing a stationary obstacle on a straight
pathway (Fig. 8a). Here, the robot’s trajectory is
nearly similar for each test run. The obstacle is al-
ways passed on the right hand side. A minor differ-
ence is that the onotology-based approach starts to
evade earlier than the combined and behavior-based
approaches. Nonetheless, a clear difference concern-
ing the vehicle’s velocities can be observed. The
REACTiON controller advances the obstacle with a
high velocity of about 2.5 m s
−1
. It starts to decel-
erate close to the obstacle (2.5 m). In contrast, the
other controllers carefully approach the obstacle due
the corresponding risk level of a medium risk. The
robot’s steering is re-adapted after the obstacle was
passed. Then, the risk level decreases to no risk and
the robot is allowed to accelerate again. Thereby, all
approaches share a rather slow velocity (1 m s
−1
) dur-
ing passing the obstacle location.
Scenario 2: Passing an Obstacle During Heavy
Rain. The next scenario is the repetition of the first
one with the vision occluded by heavy rain (Fig. 8b).
Interestingly, the standard behavior controller selects
a different route to evade the obstacle and therefore
navigates off-road. This is caused by camera dis-
turbances causes due to the weather. The ontology
and combined approach follow the trajectory from the
previous trial. Nonetheless, the overall detected risk
is in general higher (medium to high) and the ontol-
ogy controller navigates very cautiously (< 1 ms
−1
).
In contrast, the raw behavior controller navigates with
a constant high velocity of 2.5 m s
−1
and only slows
down during reentering the track. In general, the
combined approach navigates faster than the ontology
controller but slows down more strongly in front the
obstacle. The steering recommendation is similar to
the first scenario.
Scenario 3: Navigating over a Hilltop. The third
scenario is the navigation over a hilltop (Fig. 8c).
Here, all approaches share a similar trajectory and ve-
locity. The velocities decrease in the slope uphill and
slightly increase downhill. The ontology detects a low
risk in front of the hill and no risk after the hilltop.
Scenario 4: Pedestrian Crossing. The fourth sce-
nario involves two pedestrians walking close to the
robot (Fig. 8d). Again the trajectories are similar,
while the velocities differ strongly. The behavior con-
troller slows down (2 m s
−1
) when the pedestrian is
close (3 m). It accelerates (2.5 ms
−1
) after the per-
son passed the robot and slows down again in front of
the second person. Hereby, the robot finishes decel-
erating when the pedestrian has already passed since
the motion vector of the person towards the robot is
not considered by the behavior controller. It can be
assumed that such a behavior would endanger a real
person. In contrast, the onotology detects a medium
risk when the person is detected and maximum risk
when it is nearby. During the maximum risk phase,
the robot is forced to slow down to < 0.5 m s
−1
. The
robot is allowed to accelerate again after the critical
situation is over.
Scenario 5: Sharp Curve Navigation. In the fifth
scenario, the robot has to follow a sharp curve
(Fig. 8e). The onotology controller stays exactly
on the path, while the combined and behavioral ap-
proaches overshoot the curve. This results from the
stereo camera’s opening angle in combination with
the robot’s occupancy map. The robot is not able to
access uncertain regions of the map which have not
been analyzed before. The onotology overcomes this
problem through a tailored rule. The vehicle’s veloc-
ities are rather similar and a nearly constant risk level
of low risk is present.
Scenario 6: Driving through Tall Grass. The fi-
nal scenario was driving through tall grass (Fig. 8f).
Hereby, the onotology controller was able to care-
fully navigate through the grass (< 2 ms
−1
), while the
other approaches stopped in front of the spurious ob-
stacle. The onotology detected a medium risk in front
of the grass and no or respectively a low risk behind.
The iB2C controller approached the grass rapidly and
then stopped completely. The combined controller
slowly approaches the grass but was overridden from
the low level safety. This was possible since a risk
level was present and the ontology was not able to
completely disable the low level safety features.
7 CONCLUSIONS AND FUTURE
WORK
The paper presented a novel approach for situation-
aware scene assessment by combining a behavior-
based control approach with an off-road ontology.
Combining Onthologies and Behavior-based Control for Aware Navigation in Challenging Off-road Environments
143
(a) Obstacle
(b) Rain and Obstacle
(c) Hilltop
(d) Pedestrian (e) Curve
(f) Tall grass
Figure 8: Results of different simulation trials. Each test run was executed three times using the standard behavior controller
(red), the pure ontology based controller (blue), and the combined approach (pink). The subfigures depict (from the top):
scenario, trajectory, vehicle speed, ontology risk level (from no risk = 0 to high risk = 3), and the steering recommendation
(none = 0, right = 1, left = 2).
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
144

Initially, state of the art onotologies have been sum-
marized and evaluated with respect to the given sce-
nario. Next, the integrated behavior-based control
architecture iB2C was outlined, which acts as basis
for the behavioral controller and interaction concepts.
Further, an off-road onotology design has been pre-
sented. Hereby, the entity identification was described
in detail followed by an overview over the onotology
class hierarchy. After the summary of object and data
properties, the rules of onotology were derived and
explained along with an example for high risk deter-
mination. The onotology is part of the scene inter-
pretation engine SINE, which embeds it into a knowl-
edge framework featuring standardized and common
interfaces for arbitrary data exchange and indepen-
dent control and perception design. In a following
step, the assessment of onotology knowledge by a
behavior-based control approach was given. Hereby,
the transformation of risk levels into iB2C meta data
and the impact on network arbitration was explained
using an exemplary low level safety system. Fi-
nally, the approach was tested in six different simu-
lation scenarios, where the pure ontology-based con-
troller, behavior-based controller, and the combined
approach had to fulfill similar tasks. The correspond-
ing results were compared to each other and discussed
in detail.
Future work should target the extension of the
knowledge base by more entities and respective rules
so that a wider variety of scenarios can be handled.
Furthermore, the onotology should be used to detect
erroneous sensor readings and determine the corre-
sponding data quality. An additional extension could
subject the storage of a scene. This would enable
the analysis of a scene history and allow an improved
planning process as well as a better understanding of
an environment. Hereby, knowledge transfer to other
robots could be possible. This would result in a kind
of driving school for mobile robots. In the interme-
diate future, the approach can be tested with powerful
learning approaches in real world scenarios. Nonethe-
less, they should sense sufficient environmental in-
formation as for instance surface conditions, weather,
and object classes to satisfy the properties which are
required for the rule analysis of this onotology.
REFERENCES
Bagschik, G., Menzel, T., and Maurer, M. (2017). Ontol-
ogy based scene creation for the development of auto-
mated vehicles. arXiv preprint arXiv:1704.01006.
Berns, K., Kuhnert, K.-D., and Armbrust, C. (2011). Off-
road robotics - an overview. KI - K
¨
unstliche Intelli-
genz, 25(2):109–116.
Farhadi, A., Endres, I., Hoiem, D., and Forsyth, D. (2009).
Describing objects by their attributes. In Computer
Vision and Pattern Recognition, 2009. CVPR 2009.
IEEE Conference on, pages 1778–1785. IEEE.
Fleischmann, P., Pfister, T., Oswald, M., and Berns, K.
(2016). Using openstreetmap for autonomous mobile
robot navigation. In Proceedings of the 14th Interna-
tional Conference on Intelligent Autonomous Systems
(IAS-14), Shanghai, China. Best Conference Paper
Award - Final List.
Gupta, R., Kochenderfer, M. J., Mcguinness, D., and Fer-
guson, G. (2004). Common sense data acquisition for
indoor mobile robots. In AAAI, pages 605–610.
Hitzler, P., Krotzsch, M., and Rudolph, S. (2009). Foun-
dations of semantic web technologies. Chapman and
Hall/CRC.
Horrocks, I., Patel-Schneider, P. F., Boley, H., Tabet, S.,
Grosof, B., Dean, M., et al. (2004). Swrl: A semantic
web rule language combining owl and ruleml. W3C
Member submission, 21:79.
Ingrand, F. and Ghallab, M. (2017). Deliberation for au-
tonomous robots: A survey. Artificial Intelligence,
247:10 – 44. Special Issue on AI and Robotics.
Kulkarni, G., Premraj, V., Dhar, S., Li, S., Choi, Y., Berg,
A. C., and Berg, T. L. (2011). Baby talk: Understand-
ing and generating image descriptions. In Proceedings
of the 24th CVPR. Citeseer.
Mohammad, M. A., Kaloskampis, I., Hicks, Y. A., and
Setchi, R. (2015). Ontology-based framework for risk
assessment in road scenes using videos. Procedia
Computer Science, 60:1532–1541.
Musen, M. A. (2015). The prot
´
eg
´
e project: a look back and
a look forward. AI matters, 1(4):4–12.
Nwogu, I., Zhou, Y., and Brown, C. (2011). An ontology for
generating descriptions about natural outdoor scenes.
In Computer Vision Workshops (ICCV Workshops),
2011 IEEE International Conference on, pages 656–
663. IEEE.
Proetzsch, M. (2010). Development Process for Complex
Behavior-Based Robot Control Systems. PhD thesis,
Robotics Research Lab, University of Kaiserslautern,
M
¨
unchen, Germany.
Reichardt, M., F
¨
ohst, T., and Berns, K. (2012). Intro-
ducing FINROC: A Convenient Real-time Framework
for Robotics based on a Systematic Design Approach.
Technical report, Robotics Research Lab, Department
of Computer Science, University of Kaiserslautern,
Kaiserslautern, Germany.
Ropertz, T., Wolf, P., and Berns, K. (2017). Quality-
based behavior-based control for autonomous robots
in rough environments. In Gusikhin, O. and Madani,
K., editors, Proceedings of the 14th International
Conference on Informatics in Control, Automation
and Robotics (ICINCO 2017), volume 1, pages 513–
524, Madrid, Spain. SCITEPRESS – Science and
Technology Publications, Lda. ISBN: 978-989-758-
263-9.
Ropertz, T., Wolf, P., and Berns, K. (2018a). Behavior-
based low-level control for (semi-) autonomous vehi-
cles in rough terrain. In Proceedings of ISR 2018:
50th International Symposium on Robotics, pages
Combining Onthologies and Behavior-based Control for Aware Navigation in Challenging Off-road Environments
145

386–393, Munich, Germany. VDE VERLAG GMBH.
ISBN: 978-3-8007-4699-6.
Ropertz, T., Wolf, P., Berns, K., Hirth, J., and Decker,
P. (2018b). Cooperation and communication of au-
tonomous tandem rollers in street construction sce-
narios. In Berns, K., Dressler, K., Fleischmann,
P., G
¨
orges, D., Kalmar, R., Sauer, B., Stephan,
N., Teutsch, R., and Thul, M., editors, Commer-
cial Vehicle Technology 2018. Proceedings of the
5th Commercial Vehicle Technology Symposium –
CVT 2018, pages 25–36, Kaiserslautern, Germany.
Commercial Vehicle Alliance Kaiserslautern (CVA),
Springer Vieweg. ISBN 978-3-658-21299-5, DOI
10.1007/978-3-658-21300-8.
Ruiz-Sarmiento, J.-R., Galindo, C., and Gonzalez-Jimenez,
J. (2017). Building multiversal semantic maps for
mobile robot operation. Knowledge-Based Systems,
119:257–272.
Sch
¨
afer, B.-H., Proetzsch, M., and Berns, K. (2008).
Action/perception-oriented robot software design: An
application in off-road terrain. In IEEE 10th Interna-
tional Conference on Control, Automation, Robotics
and Vision (ICARCV), Hanoi, Vietnam.
Tenorth, M., Kunze, L., Jain, D., and Beetz, M.
(2010). Knowrob-map-knowledge-linked semantic
object maps. In Humanoid Robots (Humanoids), 2010
10th IEEE-RAS International Conference on, pages
430–435. IEEE.
Thrun, S., Montemerlo, M., Dahlkamp, H., Stavens, D.,
Aron, A., Diebel, J., Fong, P., Gale, J., Halpenny,
M., Hoffmann, G., Lau, K., Oakley, C., Palatucci, M.,
Pratt, V., Stang, P., Strohband, S., Dupont, C., Jen-
drossek, L.-E., Koelen, C., Markey, C., Rummel, C.,
van Niekerk, J., Jensen, E., Alessandrini, P., Bradski,
G., Davies, B., Ettinger, S., Kaehler, A., Nefian, A.,
and Mahoney, P. (2006). Winning the darpa grand
challenge. Journal of Field Robotics.
Valada, A., Vertens, J., Dhall, A., and Burgard, W. (2017).
Adapnet: Adaptive semantic segmentation in ad-
verse environmental conditions. In 2017 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 4644–4651.
Wolf, P., Ropertz, T., Berns, K., Thul, M., Wetzel, P.,
and Vogt, A. (2018a). Behavior-based control for
safe and robust navigation of an unimog in off-road
environments. In Berns, K., Dressler, K., Fleis-
chmann, P., G
¨
orges, D., Kalmar, R., Sauer, B.,
Stephan, N., Teutsch, R., and Thul, M., editors,
Commercial Vehicle Technology 2018. Proceedings of
the 5th Commercial Vehicle Technology Symposium
– CVT 2018, pages 63–76, Kaiserslautern, Germany.
Commercial Vehicle Alliance Kaiserslautern (CVA),
Springer Vieweg. ISBN 978-3-658-21299-5, DOI
10.1007/978-3-658-21300-8.
Wolf, P., Ropertz, T., Oswald, M., and Berns, K. (2018b).
Local behavior-based navigation in rough off-road
scenarios based on vehicle kinematics. In 2018 IEEE
International Conference on Robotics and Automation
(ICRA), pages 719–724, Brisbane, Australia.
Yao, B. Z., Yang, X., Lin, L., Lee, M. W., and Zhu, S.-C.
(2010). I2t: Image parsing to text description. Pro-
ceedings of the IEEE, 98(8):1485–1508.
Ziegler, J., Bender, P., Schreiber, M., Lategahn, H., Strauss,
T., Stiller, C., Dang, T., Franke, U., Appenrodt, N.,
Keller, C. G., Kaus, E., Herrtwich, R. G., Rabe, C.,
Pfeiffer, D., Lindner, F., Stein, F., Erbs, F., Enzweiler,
M., Knoppel, C., Hipp, J., Haueis, M., Trepte, M.,
Brenk, C., Tamke, A., Ghanaat, M., Braun, M., Joos,
A., Fritz, H., Mock, H., Hein, M., and Zeeb, E. (2014).
Making bertha drive – an autonomous journey on a
historic route. IEEE Intelligent Transportation Sys-
tems Magazine, 6(2):8–20.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
146
