
A Study on the Activation of Femoral Prostheses:
Focused on the Development of a Decision Tree based Gait Phase
Identification Algorithm
Sun-Jong Na
a
, Jin-Woo Shin, Su-Hong Eom
b
and Eung-Hyuk Lee
Department of Electronic Engineering, Korea Polytechnic University, Siheung, Gyeonggi-do, Korea
Keywords: Prothesis, Knee Angle, Decision Tree, Random Forest.
Abstract: This paper aims to classify the phase of gait for passive transfemoral prostheses as a preliminary study for the
development of a knee flexion angle control device in prosthetics by attaching it to the knee joint in order to
produce a walk trajectory like a normal person, while walking on a flat. However, it is not possible to
determine a gait stage according to the inflection point of a knee, since there are few angular changes in the
knee joint in the form of a seat that will support the body. Thus, in previous studies, algorithms were developed
to distinguish between three stages of the stance in the swing phase using a decision tree learning method.
However, the decision-making tree is prone to overfitting. This can be a high level of accuracy for training
data, but it is difficult to generalize when verification data or new data are entered. Therefore, in this paper,
we want to develop an algorithm for preventing the overfitting step-by-step using two different methods.
1 INTRODUCTION
Based on the 2017 report of the WHO (World Health
Organization), an estimated 30 million people with
lower limb amputees are expected to double by 2050
(Ziegler-Graham, 2008). Based on this basis, the
research on prostheses that help to compensate lower
limb amputees is being studied in a variety of ways
for the convenience of the disabled.
The prostheses are divided into passive and active
types according to the way they operate. Passive type
prostheses are able to walk on a level surface through
storing and using the force of the wearer without
power, but it is difficult to implement power for
activities such as stair climbing and running (Yoshida
et al., 2015);(Inoue et al., 2016). However, active type
prostheses are able to make their own strength by
using actuators such as cylinders or motors, so they
can perform various motions. However, they are
expensive (Andrés et al., 2016; Keles et al., 2017).
The active type prostheses can create gait
trajectories similar to normal people through actuator
control even on level walking. However, the passive
type prostheses work only as a supporting stand of the
a
https://orcid.org/0000-0002-0601-9058
b
https://orcid.org/0000-0001-8493-1432
body for the next step because they do not have the
power to create gait trajectories like normal people.
Thus, the objective of this study is to classify gait
phases in passive type prostheses as a pilot study for
the development of devices that adjust the flexion
angle of knee joints according to the gait phase by
attaching them to the knee joint of the passive type
prostheses.
Studies to distinguish gait phases have now been
conducted in two different ways. The first method is
to use ground reaction force to separate the point at
which the feet do not touch the ground (Shaikh et al.,
2015). The second method is to distinguish gait
phases according to changes in the knee angle
(Karasawa et al., 2013). Estimates of the gait phase
according to changes in the knee angle are divided by
using the maximum flexion of the knee angle and the
inflection point in the extension trajectory (Lim et al.,
2016).
The passive prostheses, however, have little
changes in the knee angle of the knee joint, and the
gait trajectory varies depending on the length of the
affected area. Also, it is not easy to apply the
inflection point based estimation method of gait
Na, S., Shin, J., Eom, S. and Lee, E.
A Study on the Activation of Femoral Prostheses: Focused on the Development of a Decision Tree based Gait Phase Identification Algorithm.
DOI: 10.5220/0007950707750780
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 775-780
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
775
phases as a result of the change in the knee angle of
these passive prosthesis users because the new
practice of gait habits after amputation varies from
person to person.
Therefore, in the previous study, an algorithm was
developed to classify the swing phase through
dividing the stance phase into three stages and
separate the gait phase by using the decision tree
learning method in the form of 'IF ~ THEN' to
distinguish the gait phase of the passive type
prosthesis users (Na et al., 2019).
However, the decision tree learning method
becomes more complex as models become more
complex and may represent overfitting. Although this
may be a high accuracy for training data, it is a
disadvantage that it is difficult to generalize as
verification data or new data are entered.
There are two ways to prevent this overfitting.
The first method is to simplify the decision tree and
control the depth of the tree. The second method is to
use a random forest model which is one of the
machine learning ensemble techniques that results in
more predictive ability and less overfitting in training
data than a single decision tree by categorizing it
through means of multiple independent decision
trees(Rezaei et al., 2018).
In this study, two methods are used to prevent the
overfitting. The first method is to simplify decision
trees, and the second method is the application of a
random forest model. Then, this study compares the
differences between decision trees based on previous
studies.
2 METHOD
In this study, changes in the knee angle are measured
during walking of passive type prosthesis wearers and
identify the limit of the classification of the gait phase
in the stance phase. To solve this issue, the changes
in the hip angles obtained using the acceleration of an
inertia sensor attached to the surface of the prosthetic
adapter and a three-axis gyro are divided into three
stages based on the ground reaction force in order to
produce training data entered as labels. The training
data develop a convergence algorithm by adding both
the decision tree that divides the stance phase into
three stages using the decision tree learning method
and an algorithm that identifies the swing phase using
the inflection point of the knee joint. Also, this study
applies algorithms using the random forest technique
to compensate for the shortcomings of the decision
tree method and compare them with previous research
methods.
2.1 Characteristics of Knee Angle
Changes in Passive Type Prosthesis
Wearers
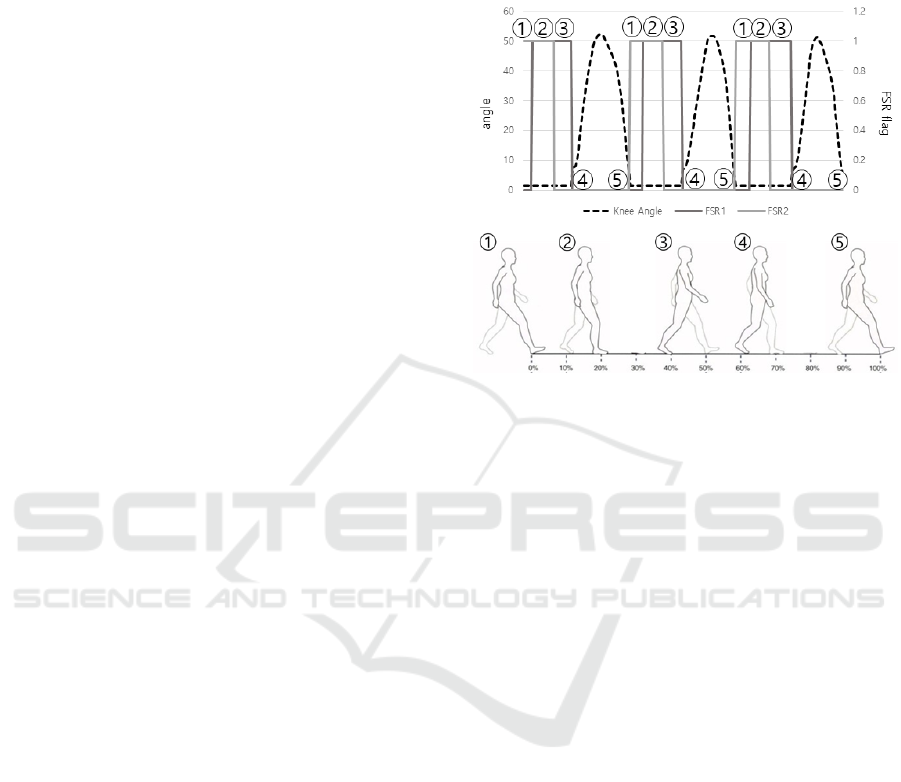
Figure 1: Gait phases according to changes in the knee
angles, separated by a pressure sensor, of a passive type
prosthesis wearer.
As shown in Figure 1, the knee joint a typical passive
type prosthesis wearer will fold the knee from the
point (④) at which one steps off the ground. Then,
the knee, which had been folded from the point where
it passed through the intermediate swing phase (⑤),
will be stretched out again for the next step.
Therefore, the swing phase (④~⑤) can be identified
by the change of the knee angles.
In the stance phase, however, it is difficult to
distinguish between the initial landing on the ground
(①), the intermediate stance phase (②), and the final
stance phase (③) as there is little change in the knee
angle because the prosthesis acts as a stand to support
the wearer.
In order for the wearers to avoid feeling awkward
in their gaits, it is necessary to create a gait trajectory
of about 18 degrees like the gait by a normal person
at the intermediate stance phase (②). Thus, it was
possible to identify the stance phase as three different
stages using the measured values at each FSR section
through the FSR attached to the toe end and heel and
the ground reaction force. It allows for the creation of
gait trajectories through the device at the point of the
intermediate stance phase (②).
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
776
2.2 Random Forest Method
The random forest technique is one of the ensemble
techniques among the various machine learning
techniques that increases the accuracy of
classification by aggregating the results from several
classification models. It is possible to maintain biased
data and to reduce overfitting by decreasing variance
because the ensemble techniques apply the average
value of the results of multiple classification models.
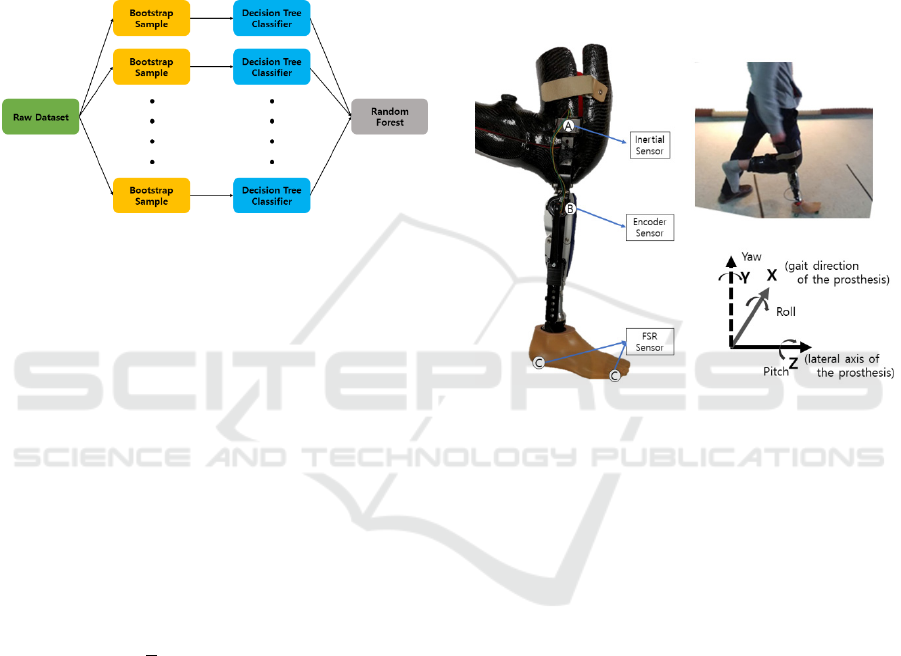
Figure 2: Structure of the random forest algorithm.
A bootstrap sample must be created to use the
random forest technique. The bootstrap sample can be
created by dividing the original dataset by attributes
and then randomly selecting the attributes for the
original dataset size. As the attributes are extracted
using an iterative extraction method, they can overlap
within a bootstrap and cause missing attributes. Thus,
it can reliably output classification values even when
new data is entered for classification because the
decision tree generated by each bootstrap is
independent of each other.
The equation for determining the probability that
one attribute will be excluded from the sample due to
iterative extraction from one bootstrap sample is as
shown in (1).
lim
→
1−
1
n
=
= 0.3678
(1)
The random forest method evaluates the accuracy
of the model using an OOB (Out-Of-Bag) error,
which collects 36.78% of excluded samples and
evaluates performance with verification data
(Breiman, 2001).
3 EXPERIMENT AND RESULTS
3.1 Experimental Procedures
In this study, we intend to simplify decision trees as
the first way of reducing overfitting. The previous
research method was a decision tree that classifies the
total of four categories, three stages in the stance
phase and one swing phase. In this study, however,
we intend to develop a convergence algorithm that
divides only the three stages in the stance phase by
using the decision tree learning method for
simplifying the model, and using the inflection point
of the knee joint in order to identify the swing phase.
In the second option, we intend to verify that this
method reduces overfitting but increases accuracy
over the previous research method by using a random
forest technique, a set of independent trees
Figure 3: Passive type prosthesis adaptor and sensor
attachment locations, experimental setting image and
coordinate system used in this experiment.
In this study, an inertial sensor is described in
relation to the coordinate system shown in Figure 3
by rotating it 90° clockwise by x-axis. A total of five
men in their 20s, two 70kg and three 80kg, walked by
wearing a mechanical prosthesis adapter with a 5
steps at 30cm intervals, and a total 500 steps from 20
times on the ground. The characteristics of the dataset
for training consisted of knee angles, three axis of
acceleration generated during walking, three axis of
gyro, and three axis angles of the hip joint. The gait
phases for each gait were labelled according to the
gait phases using the ground reaction force and FSR.
In the sampling of the obtained dataset, 80% of the
total data was used as training data and 20% of the
data was used as verification data. The inertial sensor
was attached to the point Ⓐ for measuring
acceleration, angular velocity, and angle data in the
hip joint while walking on the surface of the adapter.
The sensor Ⓑ was a variable resistance for measuring
knee angles by converting variations in the resistance
value of walking into angles. The pressure sensors,
Ⓒ, were used to separate the stance phase into three
A Study on the Activation of Femoral Prostheses: Focused on the Development of a Decision Tree based Gait Phase Identification Algorithm
777
stages. The specifications for each sensor are shown
in Table 1.
Table 1: Specifications for Each Sensor.
Name Spesification
Inertial Sensor
NGIMU (x-io)
Communication speed: 50 Hz
Communication method: Wifi
Variable Resistance Max. 10 kΩ
Pressure Sensor FSR402 (10N Sensitivity)
3.2 Results
As the depth of the decision tree was adjusted with
the pre-pruning of the decision tree generated by the
previous research method and the convergence
algorithm developed in this study, the results were
obtained as follows.
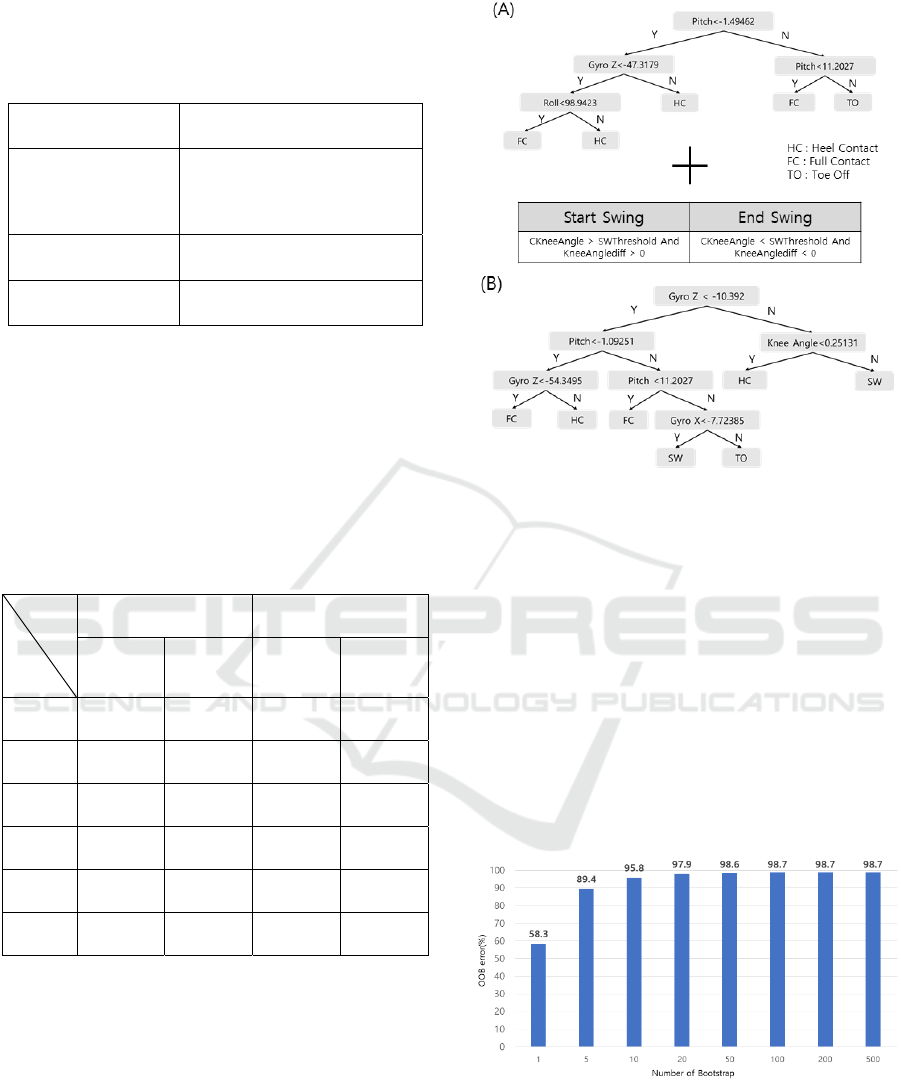
Table 2: Difference in Accuracy according to the Depth of
Each Algorithm.
Model
Depth_
STANCE 3 STANCE 3 + SWING
Training Test Training Test
0 99.8% 98.4% 100% 99.2%
1 67.9% 69.8% 61.9% 62.5%
2 92.5% 93.5% 79.3 79.3
3 94% 94.4% 92.8 92.9
4 94.3% 95% 94.1 94
5 95.2% 95.4% 95.1 94.4
As the pre-pruning was not applied, the previous
research models represented overfitting. It was
possible to verify that the accuracy of the tree
increased as it became more complex. Both the
developed convergence algorithm and the decision
tree generated by the previous research method with
the same 94% verification data accuracy are as
follows.
Figure 4: Developed convergence algorithm (A) and the
decision tree (B) with the same 94% verification data
accuracy.
In the equation for identifying the swing phase
presented in Figure 4 (A), CKneeAngle is the knee
angle currently being measured, and KneeAnglediff
represents increases or decreases in the knee angle.
SWThreshold is the boundary value for identifying
the swing phase, in this study, the accuracy of 96.87%
was set at about 0.4° considering the amount of
variation in the knee angle generated by the swing
phase. The depths of the decision tree of (A) and (B)
represent 3 and 4 respectively with the same
accuracy, but the decision tree in converged (A) was
found to be simpler than (B).
Figure 5: Changes in OOB error values according to the
number of bootstrap samples.
As shown in Figure 5, 50 bootstrap samples were
98.6% and 50 or more were 98.7%, and the accuracy
of the bootstrap was not significantly different even if
the number of bootstrap increases.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
778

Figure 6: Feature importance of the single decision tree (A)
and random forest (B).
The feature importance is an indicator of which
properties are used most importantly as a decision
tree is generated. It is determined as a value between
0 and 1, which means that 0 is not used at all, and 1
has all the information for classification. Figure 6 (A)
represents the feature importance of the decision tree
shown in Figure 4 (A) and uses only three features:
Pitch, Roll, and Gyro Z. Figure 6 (B), however, (B) is
the feature importance graph of the random forest that
uses all the attributes in training data. Thus, it reduces
the overfitting and shows easy generalization
compared to (A).
4 CONCLUSIONS
In this study, as the first step in developing a device
for the activation of passive prostheses, the objective
was to identify the gait phase in the walking of
passive prosthesis wearers. Two methods were used
to reduce overfitting. First, a decision tree that
identifies the three stages of the stance phase and a
convergence algorithm that calculates threshold
values for determining the swing phase from the
changes in knee angles were developed. It showed
that it becomes a simple model even though it has the
same accuracy as the previous research method.
Second, it was verified that the accuracy was
improved to 98.6% while reducing the risk of
overfitting in the decision tree through applying the
random forest method.
Future plans will be to develop a machine running
algorithm to identify the gait environment on a level,
slope, and stairs and to automatically change the gait
mode for each environment.
ACKNOWLEDGEMENTS
This research was supported by the Basic Science
Research Program through the National Research
Foundation of Korea (NRF) funded by the Ministry
of Education (NRF2017R1A2B2006958).
This research was supported by the Bio &
Medical Technology Development Program of the
NRF funded by the Korean government, MSIP (NRF-
2017M3A9E2063260).
This research was supported by the Technology
Innovation Program (NO.10082455, Service
Development of Spo-Edutainment School Indoor
Thema park) funded By the Ministry of Trade,
Industry & Energy (MOTIE, Korea).
REFERENCES
K. Ziegler-Graham. (2008). Estimating the prevalence of
limb loss in the United States: 2005 to 2050, Arch.
Phys. Med. Rehabil., vol. 89, no. 3, pages 422 - 429.
Shun Yoshida, Takahiro Wada, Koh Inoue. (2015). A
passive transfemoral prosthesis with movable ankle for
stair ascent, IEEE International Conference on
Rehabilitation Robotics (ICORR), pages 7 - 12.
Koh Inoue, Tomohiro Tanaka, Takahiro Wada, Shin'ichi
Tachiwana. (2016). Development of a passive knee
mechanism that realizes level walk and stair ascent
functions for transfemoral prosthesis, IEEE
International Conference on Biomedical Robotics and
Biomechatronics (BioRob), pages 522 – 527.
Guzhñay Cordero Andrés, Calle Arévalo Luis, Zambrano
Abad Julio. (2015). Walking cycle control for an active
ankle prosthesis with one degree of freedom monitored
from a personal computer, International Conference of
the IEEE Engineering in Medicine and Biology Society
(EMBC), pages 3651 – 3654.
Ahmet Doğukan Keles, Can Yücesoy. (2017).
Development of Artificial Neural Network Based
Active Ankle Prosthesis Algorithm Using Gait
Analysis Data, National Biomedical Engineering
Meeting (BIYOMUT), pages 1 – 4.
Muhammad Faraz Shaikh, Zoran Salcic, Kevin Wang.
(2015). Analysis and selection of the Force Sensitive
Resistors for gait characterization, International
Conference on Automation, Robotics and Applications
(ICARA), pages 370 - 375.
Yuta Karasawa and Yuta Teruyama. (2013). A Trial of
Making Reference Gait Data for Simple Gait
Evaluation System with Wireless Inertial Sensors,
A Study on the Activation of Femoral Prostheses: Focused on the Development of a Decision Tree based Gait Phase Identification Algorithm
779

International Conference of the IEEE EMBS, pages
3427-3430.
YoungGwang lim, SeongBong Yoo, SuHong Eom,
EungHyuk Lee. (2016). A Study On Estimation of Gait
Phase Using Peak Point Detector and Finite State
Machine, ICS´, pages 109 - 111.
Sun-Jong Na, Su-Hong Eom, Chol-U Lee, Mun-Seok Jang,
Eung-Hyuk Lee. (2019). A study on the Application of
Decision Tree Algorithm to Differentiate Gait Phases in
the Users of Transfemoral Prostheses, International
Conference on Electronics, Information and
Communication (ICEIC), pages 997 - 1001.
A. Rezaei, A. Ejupi, M. Gholami, A. Ferrone, C. Menon.
(2018). Preliminary Investigation of Textile-Based
Strain Sensors for the Detection of Human Gait
Phases Using Machine Learning, IEEE International
Conference on Biomedical Robotics and
Biomechatronics (Biorob) pages 563 – 568.
L. Breiman, (2001). "Random Forests," Machine Learning,
vol. 45, pages 5 - 32.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
780
