
Towards Automated Parameter Optimisation of Machinery
by Persisting Expert Knowledge
Richard Nordsieck
1
, Michael Heider
2
, Andreas Angerer
1
and J
¨
org H
¨
ahner
2
1
XITASO GmbH IT & Software Solutions, Augsburg, Germany
2
Organic Computing Group, University of Augsburg, Augsburg, Germany
Keywords: Additive Manufacturing, Transfer Learning, Domain Adaption, Machine Learning, Knowledge Representa-
tion.
Abstract:
Commissioning of machines takes up a considerable share of time and money of the total cost of developing
a machine. Our project aims at developing an approach to decrease the time needed to commission machines
by automating parameter optimisation with the help of formalised expert knowledge. The approach will be
developed on the Fused Deposition Modelling (FDM) process, which is an additive manufacturing technique.
We pay particular attention to keeping the approach sufficiently abstract to be applied to machines from other
domains to benefit its industrial application.
1 INTRODUCTION
Commissioning of machinery can consume up to 25%
of the total project duration according to a study of the
German Machine Tool Builders’ Association (VDW,
1997). They also state that up to 90% of this time
is spent on commissioning the electronics and control
software. As stated in (Abel, 2017), the commission-
ing process is done mainly by specialized workers, as
it is a complex process and needs expert knowledge.
The geographic location of manufacturers of ma-
chinery and their customers is not necessarily identi-
cal. This leads to employment of highly-skilled pro-
fessionals abroad, which is even more cost intensive
due to increased management costs as well as travel
and accommodation expenses. Therefore, commis-
sioning is a prime target for cost and time optimisa-
tion of the manufacturing process overall, which is
crucial for manufacturers to compete in a globalised
economy. Furthermore, customers of manufacturing
systems also have a strong interest in short commis-
sioning times, as they are a prerequisite for expedi-
tious use of newly acquired systems. Given the trend
towards Reconfigurable Manufacturing Systems (Ko-
ren, 2006), shorter commissioning times gain even
more importance: Every reconfiguration of a manu-
facturing system requires a subsequent commission-
ing to ensure proper operation of the machinery in
changed configuration.
We differentiate between static and dynamic com-
missioning. Static commissioning denotes the me-
chanical installation, operative checks of a machine
or plant and, if needed, programming of control soft-
ware. After static commissioning, single units and
their integration can be successfully tested. This can
usually be accomplished off-site e.g. at the man-
ufacturer, at least for initial machine setup. Dy-
namic commissioning, however, describes the fine-
tuning of process parameters until a satisfactory qual-
ity level of the produced part is achieved. In contrast
to static commissioning, it can be seen as proof of
a correctly working system under environmental in-
fluences. During dynamic commissioning, changes
in the parametrisation of machinery as well as slight
modifications to the control software might be neces-
sary.
To reduce the duration of commissioning, the con-
cept of virtual commissioning was introduced (Lee
and Park, 2014; Hoffmann et al., 2010). In this
concept, commissioning is simulated in varying lev-
els of detail, which allows testing the interactions of
components as well as the control programs, which
are usually based on programmable logic controllers
(PLCs)). This allows for early detection and remedy-
ing of faults, which account for a substantial amount
of time spent during the commissioning procedure
(VDW, 1997). Thereby, virtual commissioning is
able to reduce the static part of the commissioning
to the mechanical and electrical installation. How-
ever, one drawback of virtual commissioning is the
406
Nordsieck, R., Heider, M., Angerer, A. and Hähner, J.
Towards Automated Parameter Optimisation of Machinery by Persisting Expert Knowledge.
DOI: 10.5220/0007953204060413
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 406-413
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Schematic visualisation of machine lifetime. First
the machine is constructed, which is followed by com-
missioning. Later on in the lifetime of a machine re-
parametrisation might be needed. While the top bar shows
a traditional lifetime, the middle depicts a lifetime, which
is optimised by the use of virtual commissioning (VC). The
bottom bar shows the lifetime after automatic parameter op-
timisation.
effort required to create a digital twin of the plant or
machine. While this may amortise quickly for larger
manufacturing systems, plants or manufacturers that
sell the same machine multiple times, manufacturers
of special-purpose machinery find it hard to justify the
recurring expenditure.
Nevertheless, the actual commissioning, which in-
cludes the dynamic commissioning, remains neces-
sary as it is partly depending on environment-specific
conditions (Abel, 2017). Thus, adjustments that com-
pensate influences e.g. by temperature, humidity or
raw material composition can only be performed on-
site where the machine is operated. Note again that
this can be necessary during initial on-site installa-
tion of machinery, but also after re-configurations due
to changes in production processes or target prod-
ucts. Consequently, our approach aims at reducing
the time required for the dynamic part of commis-
sioning shown in orange horizontal lines in Figure
1, that is parameter optimisation. It can be applied
in conjunction with virtual commissioning, which re-
duces static parts of the commissioning process, or as
a stand alone solution.
Expert knowledge required for parameter opti-
misation is traditionally acquired by working under
the supervision of more experienced commissioners
in a trainer-trainee fashion as well as commission-
ing a vast amount of machines. Due to demographic
change and subsequent shifts in the workforce many
experts will retire in the foreseeable future. Manu-
facturers are therefore posed with the challenge of
how to preserve their knowledge and stay competi-
tive. While commissioners might have documented
commissioning procedures in varying detail and for-
mats, few manufacturers have successfully worked to-
wards a comprehensive knowledge base, according to
our knowledge.
Similarly to other production processes, Fused
Deposition Modelling (FDM) requires experts to con-
duct parameter optimisations to produce parts of satis-
factory quality. Due to the small form-factor of FDM
machines, it is feasible to control environmental in-
fluences. Furthermore, parametrisations can be tested
on multiple different parts without the need to man-
ufacture tools, as is the case in other production pro-
cesses. Therefore, we chose the FDM process to de-
velop an approach to automatic parameter optimisa-
tion in a controlled environment. We see FDM as a
representative of other production processes that de-
pend on environmental conditions. After a success-
ful verification of our approach on FDM, we study
the transferability of the approach to other production
processes, working towards our goal of decreasing
their commissioning times by automating parameter
optimisation.
This paper identifies challenges for automating
parameter optimisation and outlines an approach on
how to solve these. Section 2 provides a detailed
view on production processes of additive manufactur-
ing, based on which we will develop and verify our
approach. Challenges for automating dynamic com-
missioning are introduced in Section 3. Our approach
to automate parameter optimization by combining ex-
pert knowledge and machine learning is detailed in
Section 4. Section 5 concludes this paper.
2 CASE STUDY
As described in Section 1, we decided to develop our
approach on the Fused Deposition Modelling (FDM)
process, which is an additive manufacturing tech-
nique, in which a nozzle lays down material layer-
wise until the desired object is constructed (Gibson
et al., 2015). To facilitate this, the material is heated
above its melting point and extruded through the noz-
zle. While extruding the nozzle moves along a pre-
planned path at a given speed. When the nozzle needs
to move without extruding, e.g. when printing two
non-connected models at once, the material is first re-
tracted to decrease pressure in the extruder. Many
printers use a heated bed on which the first layer is
placed. The heating increases adhesion and slows
down the effects of thermal expansion (or in this case
contraction). We chose FDM since it is a controllable
manufacturing process with multitudes of influence
factors and configurable parameters. In addition, the
results can be analysed by hand without the need of
extensive training, a laboratory or other highly spe-
cialized equipment.
Additive manufacturing has become increasingly
popular since its commercial introduction in the late
Towards Automated Parameter Optimisation of Machinery by Persisting Expert Knowledge
407
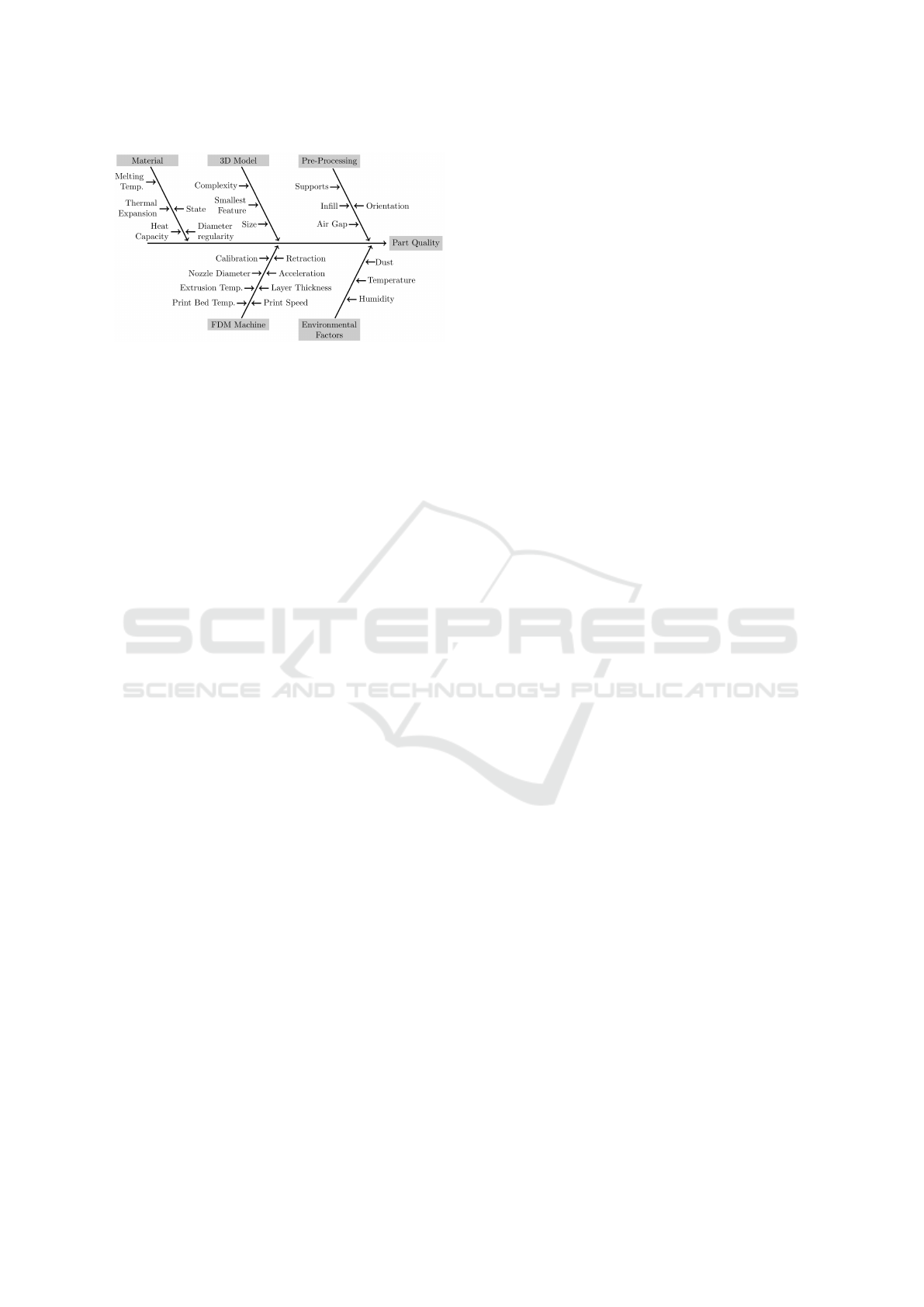
Figure 2: Cause and effect (Ishikawa) diagram of the for
this work most important influence factors on part quality
in an FDM production process.
1980s and early 1990s (Wohlers and Gornet, 2014).
It is mostly used for rapid prototyping and manufac-
turing of small quantities of items, where moulding,
casting and other conventional techniques would be
too expensive. Another benefit of additive manufac-
turing is the ability to produce complex forms. These
can be found in medical applications or if weight is of
concern.
The main development in the scope of this project
will be done on different cartesian and delta FDM
printers using different plastics, such as PLA, ABS
and PETG. After thoroughly evaluating our approach
on multiple FDM printers, we will move on to differ-
ent additive manufacturing techniques such as binder
jetting (BJ) and selective laser sintering (SLS). BJ is a
process, where powdered material is fused into form
by applying a binding agent. SLS is another powder
bed based process, where material is sintered locally
and thereby fused into form. For each process ex-
pert knowledge will be collected and formalised sepa-
rately. While certain expertise can be directly applied
to the other additive manufacturing techniques, some
knowledge is most likely very specific and differs be-
tween them. Thus, we will be able to test the transfer
of knowledge between different machines of the same
production process as well as between different addi-
tive manufacturing production processes. This marks
the first step towards an abstract universal architec-
ture.
The final quality of a 3D printed part is depen-
dent on various factors with differing degrees of in-
fluence (Mohamed et al., 2015). Some factors can be
quantified or measured better than others. The anal-
ysis of those factors can be done in discretionary de-
tail. We have isolated the factors deemed most im-
portant in this context for the case of a generic FDM
process in Figure 2. As we focus on developing an
approach for parameters that are adjustable by soft-
ware, some machine parameters, like nozzle diame-
ter or filament width, can be seen as set. To offset
the influences of wear and tear in mechanical parts
on our machine learning systems, we plan on replac-
ing the printers with new off the shelf versions during
the project. We will focus on the commissioning and
initial parametrisation of a system and thus not inves-
tigate machine degradation influences on optimal pa-
rameter selection.
There are several environmental factors that affect
the quality of a produced part. In the following we
will provide an overview of the environmental factors
most relevant to FDM printing as well as to parame-
ters used to mitigate their effects. Humidity has a sig-
nificant impact on material quality. Due to the time
it requires to infuse the filament it is more relevant
during storage of filaments than during the printing
process. Dust can, depending on amount and compo-
sition, decrease print quality and do serious damage
to the machine by inflaming. Temperature is another
relevant factor. On a process-agnostic perspective ex-
cessive heat or cold could do substantial damage to
machine parts. On a process-related perspective the
effects are more subtle. When molten plastics cool
down they solidify and contract, the degree of which
is dependent on the temperature and specific plastic.
In the case of FDM printers this can lead to warping.
Warping is a process, where segments of the printed
part deform (curling upwards, away from the build
plate, along the parts edges). It typically occurs as
the lower-layers of the part cool down too fast. Since
freshly extruded material needs to cool quicker than
it would under room temperature (21
◦
C) most print-
ers include a cooling fan to increase print quality. We
will initially focus on temperature as a factor, as it,
opposed to humidity, directly influences the process
of FDM printing. Another relevant factor that of-
ten varies under real-word conditions is raw-material
quality and composition, which influences print qual-
ity due to different temperature and form related prop-
erties. As such, we will conduct experiments, vary-
ing both temperature and raw-materials leading to a
dataset, which we will use to train algorithmic ap-
proaches to parameter optimisation.
The main FDM parameters modifiable through
software are either related to temperature, movement
or the preprocessing (i.e. slicing, the generation of
support structures and machine path planning). Print-
ing bed and extrusion temperature can offset low sur-
rounding temperatures while cooling fan speed can
aid the cooling of freshly extruded filament. Layer
thickness not only influences the optical appearance
of a part but also the material properties during and af-
ter printing. Bridging is a part of the part construction
process, where the printer tries to extrude material in
an area, where no (immediate) lower layer is present,
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
408

thus bridging two segments of lower layer together.
Bridging becomes harder to accomplish if the part
cools down too fast or too slow. Low speed can also
result in bridges failing. Intelligent support placing
could offset arising issues as bridges would become
shorter. In the best case issues could also be prevented
by simple print orientation changes, e.g. bottom up
(Kozior and Kundera, 2017). Since we want to focus
on parameters that are transferable to other production
processes, we will focus on optimising parameters re-
lating to the actual process as opposed to parameters
changing the structure of the produced part. Vibra-
tions that increase with velocity changes of the nozzle
disrupt precise printing. Lowering the print speed and
accelerations can accommodate for that (Alafaghani
et al., 2017). Slower printing also tends to allow the
extruded material to better set in place, rather than
getting dragged along. Adjusting print speed and ac-
celeration quickly becomes a trade-off between quan-
tity and quality of produced parts. The analysis of our
experimental results will help to quantify this trade-
off.
3 CHALLENGES
Our research hypothesis is that parameter optimisa-
tion has a significant effect on the quality of produced
parts and thereby the amount of time required for
commissioning. Consequently, automating parame-
ter optimisation has the potential to effectively reduce
cost and time spent on commissioning manufacturing
systems. To confirm this hypothesis we plan to con-
trast times required for manual parameter optimisa-
tion with those resulting from the application of our
optimisation algorithm. Actually developing a de-
pendable approach for this task, however, poses sev-
eral challenges as outlined in this chapter.
3.1 Identification and Quantification of
Parameters
In Section 2 we introduced several environmental in-
fluences that can have a detrimental effect on the pro-
duction process of the machine that is to be commis-
sioned. Correctly identifying and quantifying them
is a challenging task. This becomes especially evi-
dent if one considers diverse raw materials and their
possibly differing qualities, e.g. manufacturer or even
batch dependent.
Furthermore, we introduced process parameters
that can be varied to mitigate the detrimental effect
of aforementioned environmental parameters. To val-
idate that these parameters are actually relevant to
the production process and all relevant parameters are
taken into consideration, we will conduct structured
interviews with companies that employ additive man-
ufacturing at an industrial scale and other experts in
the field.
Section 2 is limited to processes encountered in
the domain of additive manufacturing. Since we aim
for an approach that can also be applied to other
production processes we need to arrive at a domain-
independent definition of commissioning. This defi-
nition can then be used to define similarities between
production processes and their commissioning proce-
dures. To arrive at this definition we will also conduct
structured interviews over a broad range of producers
of manufacturing systems or manufacturers.
3.2 Data-related Challenges
Commissioning in full, is usually executed before the
handover of the manufacturing system. Parameter op-
timisation can also be required after a change in raw-
material quality, a refit to produce different parts or
extensive maintenance work. Compared to the overall
runtime of a manufacturing system, this leads to very
few opportunities to collect data. To generate data a
simulation of the production process in question could
be employed. However, many production processes
are heavily influenced by advanced thermodynamics
and material properties. Therefore, simulating them
to the degree of detail that is needed requires large
amounts of time and resources. Furthermore, the
simulation would be limited to one production pro-
cess and not easily adaptable to additional processes,
which would render it uneconomic. A more promis-
ing solution to the data sparsity could be achieved by
incorporating data collected by predictive quality ap-
proaches already employed on similar machines in
the field. This would make it easier to empirically
detect correlations between environmental influences
and corresponding parameter configurations.
Automatically assessing the quality of chosen pa-
rameters via assessing the quality of the produced
product is another data-related challenge. This would
require the presence of automatic quality measure-
ment systems, which is not commonplace. There-
fore, our envisioned approach should actively request
feedback of experts that manually assess the product’s
quality.
Towards Automated Parameter Optimisation of Machinery by Persisting Expert Knowledge
409

Figure 3: Schematic description of knowledge based (top-
down) and learning systems (bottom-up). Our proposed
approach (ACPE) combines aspects of both and is conse-
quently shown in the middle.
4 TOWARDS AUTOMATIC
COMMISSIONING
As outlined in Section 3, one of the main challenges
for applying learning systems is the scarcity of com-
missionings of identical machines, which leads to few
opportunities for collecting data. To mitigate the re-
sulting uncertainties and training difficulties we pro-
pose an approach that combines learning and knowl-
edge based methods. Based on a large amount of
observations, learning systems generalize knowledge.
As such, they work in a bottom–up manner. Contrary
to that, knowledge based systems work as a top–down
approach, inferring facts from a knowledge- and rule-
base (Liao, 2005). A high level overview of these
paradigms and their proposed interactions with our
approach can be seen in Figure 3. This sections out-
lines our approach to achieve automatic parameter op-
timisation for commissioning under the constraint of
sparse data and places it in academic context.
4.1 Learning Quality Prediction and
Strategy Selection
In the context of FDM printing we see machine learn-
ing as a viable approach for achieving suitable quality
prediction and strategy selection. In a reinforcement
learning context a strategy would also be referred to
as a policy. The ideal strategy would be to select pro-
cess parameters (the action the system should take)
for each set of 3D model, printer, environment and
material (forming the state the system finds itself in)
in a manner that facilitates the highest possible qual-
ity. Predicting the print quality requires an algorithm
to predetermine the quality of a part produced by ap-
plying an action to a specific state. Quality predic-
tion and strategy selection are generally different ma-
chine learning tasks, namely regression and planning.
We will solve those with different base algorithms
forming an actor-critic method (Sutton et al., 2000).
Nonetheless, the results obtained by quality predic-
tion can greatly improve strategy selection. Given an
advanced quality prediction system each state-action
pair can be evaluated on the fly without the need to
real world test it by printing it, resulting in model-
based learning, which would be considerably faster.
If the described ideal strategy was known, it would
allow instantaneous commissioning of all printers for
all tasks without the need of any commissioning time.
An ideal partial strategy selects optimal actions (re-
turning the highest quality part) for one given printer.
We expect partial strategies to be related to each other
and in conjunction to be able to closely describe the
ideal strategy, if enough partial strategies are known.
Finding a quality prediction system, that is able to
successfully generate reliable quality predictions for
all state-action pairs, will not be achievable due to
the large variety of printers and models. However we
will create partial prediction systems that are able to
perform for individual or small sets of printers, while
trying to maintain an as large as possible variety of
predictable models. Those partial prediction systems
will be able to generalise for similar printers. The
main challenge for constructing the prediction sys-
tem will be the availability of data as there are—to
our knowledge—no public comprehensive 3D print-
ing data sets and as such all training data will have to
be generated. To solve the quality prediction problem
we will investigate the use of various classification
techniques such as linear regression, decision trees
(Kotsiantis, 2013), support vector machines and ar-
tificial neural networks. Depending on the algorithm
we will either model classifications as individual re-
gression problems or engineer a metric to transform
class based assessments into a single variable descrip-
tion. This is done to ensure comparability. Beyond
the algorithm itself we see two general approaches to
the problem: To either try to directly incorporate the
model as a whole into the classifier or to only use an
abstract representation for it. The former would re-
sult in the use of learned convolutions (in the form of
neural network layers) to extract core features and the
latter would require an advanced (computable) met-
ric to describe model complexity. During this project
we will research the most feasible classification al-
gorithm and approach for our problem as they both
have advantages and drawbacks. Convolutional net-
works typically need numerous training samples, in-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
410

creasing with depth, until good results are achieved.
When, like in this case, the exact targets are un-
known, but rather represent a partial input for classifi-
cation, learning the correct convolution becomes even
harder. Yet they are able to learn complex connections
for which finding an accurate algorithmic description
would normally require large amounts of time.
To find reasonable strategies we plan to utilise Ex-
tended Classifier Systems (XCS) (Wilson, 1995; Butz
and Wilson, 2002) a derivative of Learning Classifier
Systems (LCS) (Holland, 1976). While standard XCS
typically takes binary inputs we will encounter con-
tinuous (e.g. temperatures or speeds) or other non bi-
nary inputs and therefore need the ability to take real
value inputs, which becomes possible in the XCS ex-
tension XCSR (Wilson, 2000). XCSR uses IF-THEN
rules with an assigned quality (accuracy in predicting
reward). Those IF-THEN rules are typically gener-
ated and optimised by a steady-state niche genetic al-
gorithm (GA) but they can also be created by humans,
for example by formalising the knowledge of a pool
of experts as described in Section 4.2. The strategy
itself will need to be able to extrapolate knowledge
from known state-action pairs and combine it with ex-
isting knowledge. To fill existing knowledge gaps, as
formerly defined by Stein et al. (Stein et al., 2018),
active learning (Cohn et al., 1994) can be employed
(Stein et al., 2017a). In addition we will expect to be
able to use interpolation between known classifiers to
gain knowledge on inter-laying classifiers (Stein et al.,
2016; Stein et al., 2017b). Figure 4 illustrates the ba-
sic procedure. Known points (sets of parameters) in
the multi-dimensional parameter space, that are simi-
lar to the parameter combination for which the quality
is to be determined, are selected and interpolated to
determine the new quality.
4.2 Incorporating Expert Knowledge
Historically, there have been multiple options of inte-
grating expert knowledge with algorithms. The most
prominent are expert systems. Expert systems con-
sist of manually curated knowledge bases that contain
facts and rules, as well as inference engines that de-
duce facts based on the associated knowledge bases
(Liao, 2005). However, formalising expert knowl-
edge to a sufficient degree is a complex task, espe-
cially since experts tend to take a certain amount of
common-sense for granted, omitting crucial informa-
tion about the process. Furthermore they can only
dedicate a limited amount of time since they are con-
stantly required to work on projects creating more di-
rect revenue.
Embeddings of knowledge bases are successfully
Figure 4: Illustration of a three dimensional subset of
the parameter space, that includes the parameters, part to
be produced (the pre-processed 3D Model) and machine
type and the parameter group of environmental influences.
Points for which the quality is known are displayed as grey
circles. Points for which no knowledge is available are
displayed as orange triangles. Using similarities between
known and unknown points a set of known points (grey
cube) is selected. A function
˜
f allows interpolation of
knowledge for the unknown point.
applied to increase performance of learning systems,
for example in recommender systems (Wang et al.,
2018; Sun et al., 2018) and text understanding (Wang
et al., 2017; Yang and Mitchell, 2019). In the context
of LCS Urbanowicz et al. experimented with the in-
corporation of expert knowledge for guiding the dis-
covery components to explore attribute values found
most predictive (Urbanowicz et al., 2012). In addi-
tion, reasoning tasks have been shown to fall short be-
cause of a lack of formalised common-sense knowl-
edge being present in the data they have been trained
on (Tandon et al., 2018). Similarly, there are ap-
proaches to mitigate this by incorporating formali-
sations of common-sense knowledge in the training
process (Ma et al., 2018). Inspired by the success-
ful combination of knowledge bases and learning sys-
tems outlined above, our approach seeks to mitigate
the effect of scarce training data, by fusing of knowl-
edge based and learning systems.
Knowledge about production processes, relevant
parameters and influences is readily available in the
industry. However, most of the time it is not docu-
mented in a structured and digitalized way. Therefore,
we propose to work towards a knowledge base by per-
sisting expert knowledge. As a first step we will form
a semi-structured natural language knowledge base by
recording expert knowledge of the FDM process with
a markup language. This has the benefit of provid-
ing an easy to use interface for experts. Furthermore,
if embedded in a documentation infrastructure, that
Towards Automated Parameter Optimisation of Machinery by Persisting Expert Knowledge
411

other experts have access to, it provides a way of shar-
ing knowledge throughout the company. While this
infrastructure can already be considered a knowledge
base, it is not yet easily computationally interpretable.
Therefore, it is converted into a more formal represen-
tation consisting of conditions (Lehmann and Magi-
dor, 1992) and triples, that describe relationships be-
tween entities (Nickel et al., 2016). Based on formal
representations, multiple approaches exist in litera-
ture for knowledge base completion by automatically
detecting and creating missing relations (Socher et al.,
2013; Nguyen et al., 2018; Lin et al., 2015; Das et al.,
2017). We will evaluate their applicability to process-
oriented knowledge bases. Lastly, these completed
formal representations are then transformed into em-
beddings which can be incorporated into the learning
algorithms to give them an understanding of process
knowledge. We assume that this has a positive effect
on the amount of data required for training.
As another approach addressing the scarcity of
training data we want to evaluate transformations
between knowledge representations. Knowledge in
LCSs is represented by a learnt set of rules, whereas in
ANNs it is represented by a matrix of neural weights.
LCSs’ knowledge representation is closer to that of
a knowledge base, as in LCSs knowledge is mod-
elled as IF-THEN rules (with an assigned quality).
Thus, we will first evaluate a transformation between
knowledge bases and LCSs before trying the same
with ANNs.
5 CONCLUSIONS
This work illustrated the challenges faced during
commissioning of machinery and detailed how auto-
matic parameter optimisation can decrease both time
needed for commissioning as well as down-times dur-
ing the remainder of a machine’s lifetime. We intro-
duced FDM printing as a case study, outlining param-
eters that can be adjusted to increase its robustness
against environmental factors. To achieve automatic
parameter optimisation we outlined an approach to
develop a learning system that could also facilitate
on-boarding of and knowledge transfer between com-
missioners. A concrete next step will be the devel-
opment of a pipeline to reproducibly conduct exper-
iments with FDM printers to quantify the effect of
different parameter configurations. In future research
we will strive to realise the envisioned goal by imple-
menting and evaluating the described approach on the
dataset resulting from these experiments.
ACKNOWLEDGEMENTS
This work is supported by the German Federal Min-
istry for Economic Affairs and Energy (BMWi).
REFERENCES
Abel, M. (2017). Automatisierte Inbetriebnahme von rekon-
figurierbaren Bearbeitungsmaschinen mit serviceori-
entierten Paradigmen. Stuttgart : Fraunhofer Verlag.
Alafaghani, A., Qattawi, A., Alrawi, B., and Guzman, A.
(2017). Experimental Optimization of Fused Deposi-
tion Modelling Processing Parameters: A Design-for-
Manufacturing Approach. Procedia Manufacturing,
10:791–803.
Butz, M. and Wilson, S. W. (2002). An Algorithmic De-
scription of XCS. In Soft Comput. 6, pages 144–153.
Cohn, D., Ladner, R., and Waibel, A. (1994). Improv-
ing generalization with active learning. In Machine
Learning, pages 201–221.
Das, R., Dhuliawala, S., Zaheer, M., Vilnis, L., Durugkar,
I., Krishnamurthy, A., Smola, A., and McCallum, A.
(2017). Go for a walk and arrive at the answer: Rea-
soning over paths in knowledge bases using reinforce-
ment learning. arXiv preprint arXiv:1711.05851.
Gibson, I., Rosen, D., and Stucker, B. (2015). Ad-
ditive Manufacturing Technologies - 3D Printing,
Rapid Prototyping, and Direct Digital Manufacturing.
Springer-Verlag.
Hoffmann, P., Schumann, R., Maksoud, T. M., and Premier,
G. C. (2010). Virtual Commissioning Of Manufac-
turing Systems A Review And New Approaches For
Simplification. In ECMS, pages 175–181.
Holland, J. H. (1976). Adaptation. In Progress in Theo-
retical Biology, volume 4, page 263–293. Academic
Press, New York.
Koren, Y. (2006). General RMS Characteristics. Compar-
ison with Dedicated and Flexible Systems. Recon-
figurable Manufacturing Systems and Transformable
Factories.
Kotsiantis, S. B. (2013). Decision trees: a recent overview.
Artificial Intelligence Review, 39(4):261–283.
Kozior, T. and Kundera, C. (2017). Evaluation of the In-
fluence of Parameters of FDM Technology on the Se-
lected Mechanical Properties of Models. Procedia En-
gineering, 192:463–468.
Lee, C. G. and Park, S. C. (2014). Survey on the virtual
commissioning of manufacturing systems. Journal
of Computational Design and Engineering, 1(3):213–
222.
Lehmann, D. and Magidor, M. (1992). What does a condi-
tional knowledge base entail? Artificial intelligence,
55(1):1–60.
Liao, S.-H. (2005). Expert system methodologies and
applications—a decade review from 1995 to 2004. Ex-
pert Systems with Applications, 28(1):93–103.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
412

Lin, Y., Liu, Z., Luan, H., Sun, M., Rao, S., and Liu, S.
(2015). Modeling Relation Paths for Representation
Learning of Knowledge Bases.
Ma, Y., Peng, H., and Cambria, E. (2018). Targeted aspect-
based sentiment analysis via embedding common-
sense knowledge into an attentive LSTM. In Thirty-
Second AAAI Conference on Artificial Intelligence.
Mohamed, O. A., Masood, S. H., and Bhowmik, J. L.
(2015). Optimization of fused deposition model-
ing process parameters: a review of current research
and future prospects. Advances in Manufacturing,
3(1):42–53.
Nguyen, D. Q., Nguyen, T. D., Nguyen, D. Q., and Phung,
D. (2018). A Novel Embedding Model for Knowl-
edge Base Completion Based on Convolutional Neu-
ral Network. In Proceedings of the 2018 Conference
of the North American Chapter of the Association for
Computational Linguistics: Human Language Tech-
nologies, volume 2, pages 327–333.
Nickel, M., Murphy, K., Tresp, V., and Gabrilovich, E.
(2016). A review of relational machine learning for
knowledge graphs: From Multi-Relational Link Pre-
diction to Automated Knowledge Graph Construction.
Proceedings of the IEEE, 104(1):11–33.
Socher, R., Chen, D., Manning, C. D., and Ng, A. Y. (2013).
Reasoning With Neural Tensor Networks for Knowl-
edge Base Completion. In NIPS.
Stein, A., Maier, R., and H
¨
ahner, J. (2017a). Toward Cu-
rious Learning Classifier Systems: Combining XCS
with Active Learning Concepts. In Proceedings of the
Genetic and Evolutionary Computation Conference
Companion, GECCO ’17, pages 1349–1356, New
York, NY, USA. ACM.
Stein, A., Rauh, D., Tomforde, S., and H
¨
ahner, J. (2016).
Architecture of Computing Systems – ARCS 2016:
29th International Conference, Nuremberg, Germany,
April 4-7, 2016, Proceedings, chapter Augmenting the
Algorithmic Structure of XCS by Means of Interpola-
tion, pages 348–360. Springer International Publish-
ing, Cham.
Stein, A., Rauh, D., Tomforde, S., and H
¨
ahner, J. (2017b).
Interpolation in the eXtended Classifier System: An
Architectural Perspective. Journal of Systems Archi-
tecture, pages 79–94.
Stein, A., Tomforde, S., Diaconescu, A., H
¨
ahner, J., and
M
¨
uller-Schloer, C. (2018). A Concept for Proac-
tive Knowledge Construction in Self-Learning Au-
tonomous Systems. In 2018 IEEE 3rd International
Workshops on Foundations and Applications of Self*
Systems (FAS*W), pages 204–213.
Sun, Z., Yang, J., Zhang, J., Bozzon, A., Huang, L.-K., and
Xu, C. (2018). Recurrent knowledge graph embed-
ding for effective recommendation. In Proceedings of
the 12th ACM Conference on Recommender Systems,
pages 297–305. ACM.
Sutton, R. S., McAllester, D. A., Singh, S. P., and Man-
sour, Y. (2000). Policy Gradient Methods for Rein-
forcement Learning with Function Approximation. In
Solla, S. A., Leen, T. K., and M
¨
uller, K., editors, Ad-
vances in Neural Information Processing Systems 12,
pages 1057–1063. MIT Press.
Tandon, N., Varde, A. S., and de Melo, G. (2018). Com-
monsense knowledge in machine intelligence. ACM
SIGMOD Record, 46(4):49–52.
Urbanowicz, R. J., Granizo-Mackenzie, D., and Moore,
J. H. (2012). Using Expert Knowledge to Guide
Covering and Mutation in a Michigan Style Learn-
ing Classifier System to Detect Epistasis and Hetero-
geneity, pages 266–275. Springer Berlin Heidelberg,
Berlin, Heidelberg.
VDW (1997). Abteilungs
¨
ubergreifende Projektierung kom-
plexer Maschinen und Anlagen. VDW-Bericht.
Wang, H., Zhang, F., Xie, X., and Guo, M. (2018). Dkn:
Deep knowledge-aware network for news recommen-
dation. In Proceedings of the 2018 World Wide Web
Conference on World Wide Web, pages 1835–1844.
International World Wide Web Conferences Steering
Committee.
Wang, J., Wang, Z., Zhang, D., and Yan, J. (2017). Combin-
ing Knowledge with Deep Convolutional Neural Net-
works for Short Text Classification. In IJCAI, pages
2915–2921.
Wilson, S. W. (1995). Classifier Fitness Based on Accuracy.
In Evol. Comput. 3, page 149–175.
Wilson, S. W. (2000). Get Real! XCS with Continuous-
Valued Inputs. In Learning Classifier Systems, page
209–219. Springer Berlin Heidelberg,.
Wohlers, T. and Gornet, T. (2014). History of additive man-
ufacturing. Wohlers report, 24(2014):118.
Yang, B. and Mitchell, T. (2019). Leveraging knowl-
edge bases in LSTMs for improving machine reading.
arXiv preprint arXiv:1902.09091.
Towards Automated Parameter Optimisation of Machinery by Persisting Expert Knowledge
413
