
Multi-radio Data Fusion for Indoor Localization using Bluetooth and
WiFi
Afaz Uddin Ahmed
1,2
a
, Reza Arablouei
1 b
, Frank de Hoog
1 c
,
Branislav Kusy
1
d
and Raja Jurdak
1,2 e
1
School of Information Technology and Electrical Engineering, University of Queensland, St. Lucia, QLD 4072, Australia
2
Data61 Group, CSIRO, QLD 4069, Australia
Keywords:
Data Fusion, Multi-radio, Indoor Localization, WiFi, Channel State Information, Bluetooth Low Energy.
Abstract:
Location estimation through fusing the information obtainable from multiple radio systems can reduce the
dependency on each system and improves the performance. Research on fusion-based indoor localization
using WiFi and Bluetooth-low-energy (BLE) beacons has mostly been limited to training-based approaches.
In this paper, we propose a training-free indoor localization technique using received signals from WiFi and
BLE device. The proposed technique estimates the position of the user device by fusing the information
that it gains regarding the position of the target from the WiFi channel state information (CSI) and the RSSI
measurements of BLE beacons. We use the WiFi CSI to estimate the angle of arrival (AoA), which we then use
in conjunction with the RSSI measurements from the BLE beacons to develop a multi-radio fusion framework
for indoor localization. We use a weighted centroid localization method to obtain an initial position estimate
from the RSSI measurements. The initial position estimation helps to resolve the ambiguities in the AoA.
The proposed technique is based on maximum-likelihood estimation (MLE) exploiting the probability density
functions of the estimated AoA and the RSSI-induced distances. Simulation results show that the proposed
technique improves the localization accuracy by 30% in a typical indoor environment compared with previous
approaches.
1 INTRODUCTION
Indoor localization using measurements from mul-
tiple wireless platforms offers better reliability for
location-based applications compared to a single
wireless platform (Kanaris et al., 2017). Fusing mea-
surements from multi-radio systems compensate for
the limitations of the individual platforms such as in-
consistency in the measurements, the randomness of
the measured data due to noise from the environment,
high computational complexity, and high duty cycle.
Integration of measurements from multiple platforms
improves the reliability and accuracy of the local-
ization system. It reduces the error in location esti-
mation and performs better than the stand-alone sys-
tem (Hilsenbeck et al., 2014).
a
https://orcid.org/0000-0002-9919-3126
b
https://orcid.org/0000-0002-6932-2900
c
https://orcid.org/0000-0002-4632-564X
d
https://orcid.org/0000-0001-9082-3243
e
https://orcid.org/0000-0001-7517-0782
Data fusion for user localization was initially in-
troduced by fusing the GPS and inertial sensors data
from the smart-phone for outdoor tracking (Qi and
Moore, 2002). The main purpose was to make the lo-
calization process more energy efficient by reducing
the duty cycle of the GPS unit. This is feasible be-
cause even if the GPS signal gets interrupted at a reg-
ular interval, data collected from the inertial sensors
can aide the localization process through a data fusion
framework. Multi-radio-fusion-basedlocalization is a
new branch in indoor localization but is challenged by
the random fluctuation of signal strength.
Past fusion based indoor localization tech-
niques were developed on platforms such as, Blue-
tooth (Mirowski et al., 2013), WiFi (Lepp¨akoski et al.,
2013; Lim et al., 2007), ultra-wide-band (Gezici et al.,
2005), or ultrasound (Kuban et al., 2005) in con-
junction with pedestrian dead reckoning (PDR) (Fang
et al., 2005; Chang et al., 2015). PDR is a pro-
cess to use smart-phones inertial sensors, accelerom-
eters, magnetometers, and gyroscopes to determine
the current position based on the previous positions
Ahmed, A., Arablouei, R., de Hoog, F., Kusy, B. and Jurdak, R.
Multi-radio Data Fusion for Indoor Localization using Bluetooth and WiFi.
DOI: 10.5220/0007954100130024
In Proceedings of the 9th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS 2019), pages 13-24
ISBN: 978-989-758-385-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
13

recorded. The initial data fusion for indoor localiza-
tion integrates the data from WiFi and PDR (Even-
nou and Marx, 2006). Fusion using data from inertial
measurement units (IMU) is widely used in recent in-
door fusion based techniques (Chen et al., 2014; Koo
et al., 2014; Li et al., 2017; Gallagher et al., 2012;
Lin et al., 2015). In (Liu et al., 2017), a multi-sensor
fusion method is proposed using cameras, WiFi, and
IMU measurements. Use of cameras for indoor local-
ization is also proposed in (Papaioannou et al., 2014;
Jiao et al., 2018; Gu et al., 2017). For indoor navi-
gation of robots, different heuristic fusion algorithms
have been developed using RFID tags (Choi et al.,
2011), ultrasonic sensors (Luo and Lai, 2012), piezo-
electric sensors (Luo and Chen, 2013), and position-
ing radar (Dobrev et al., 2016). Past researches tend
to characterize the PDR as a non-linear function and
leverage particle filters to tackle the non-linearity. In
the measurements of PDR, several parameters need
to be specified, including the initial point and walk-
ing direction (Tarr´ıo et al., 2011). However, the
high computational load of applying particle filters in
radio mapping techniques necessitates offline track-
ing (Gustafsson et al., 2002). In recent times, there
have been a few fusion-based techniques that use
both bluetooth low energy (BLE) and WiFi. These
techniques use the received signal strength indicator
(RSSI) measurements from both BLE and WiFi to
execute the training-based and training-free models.
Fusing RSSI from two different wireless devices im-
proves the localization performance, but the perfor-
mance is still limited by the random fluctuation of the
RSSI measurements. Moreover, these techniques do
not take advantage of the recently available resource,
such as CSI measurement from the WiFi. In section
2, we briefly discuss CSI based techniques.
With the growing need for location-based applica-
tions, there is a demand for a universal and easily de-
ployable indoor localization system. In this research,
we propose a multi-radio data fusion framework for
indoor localization using BLE and WiFi access point.
A BLE beacon is an easily-deployable low-cost wire-
less sensor device that supports a wide range of in-
door localization techniques. However, position esti-
mation using BLE beacon has a high error rate due
to RSSI fluctuations. Nowadays, WiFi access points
are wide availability in indoor premises and have the
potential to resolve the fluctuation of RSSI in fusion-
based localization. In recent times, the channel state
information (CSI) received at the WiFi access point is
easily accessible in some commercial network inter-
face card (NIC). CSI contains the information of the
channel impulse response, which is influenced by the
channel characteristics, including multipath propaga-
tion. CSI-based localization techniques are compli-
cated but more accurate and reliable than RSSI based
techniques (Kotaru et al., 2015). However, most CSI-
based techniques require the user device to connect
with multiple WiFi access points for localization pur-
poses. It is challenging to get connected to multi-
ple access point in residential places where access to
most of the networks is password protected. In the
case of indoor commercial space, proper RF site sur-
vey does not allow a densely overlapping zone of the
same network. Moreover, the user device periodi-
cally switches connection among WiFi access points
to provide CSI measurement to assist the localization
process. Not only this hinders the internet connec-
tivity of the device, but it also creates network insta-
bility as the devices will continuously disconnect and
reconnect.
In this work, we fuse the RSSI measurements
from BLE beacons and the CSI measurements from
WiFi to develop a new indoor localization technique.
The localization technique focuses on the easily de-
ployable feature of BLE beacon and CSI based angle
of arrival (AoA) estimation technique at WiFi access
points. The proposed fusion framework combined the
existing RSSI technique with AoA estimation from
WiFi and obviates the deployment of multiple WiFi
access points. The CSI data from the WiFi is fed into
the modified matrix pencil (MMP) method developed
in (Ahmed et al., 2018). The MMP is a sub-space
based high-resolution direction-of-arrival (DoA) es-
timation technique which works with the CSI data.
It estimates the AoA and time of flight (ToF) of the
incoming signal. ToF estimation from CSI data is
not reliable. Previous works have used multiple WiFi
access points to estimate the position using triangu-
lation (Kotaru et al., 2015). In our fusion frame-
work, we use only one WiFi access point. Use of
just one WiFi access point to implement the existing
techniques is challenging. The estimated AoA con-
tains three ambiguities. In the paper, we eliminate
these ambiguities by estimating an initial position us-
ing weighted centroid localization (WCL). WCL is
a weight based range-free technique that estimates a
position using weights which are propositional to the
magnitude of the RSSI (Blumenthal et al., 2007; Chan
and Soong, 2016; Laurendeau and Barbeau, 2009).
The range-free technique does not calculate the dis-
tance between the transmitters and receivers (Karim
et al., 2010). We use the lognormal shadowing
pathloss model to estimate the distances using the
BLE RSSI and then develop a fusion technique using
the estimated-distance, and estimated-AoA. The pro-
posed fusion technique is called distance-AoA fusion,
and it fuses the probability density functions (PDF) of
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
14

estimated-distance and estimated-AoA. We also com-
pare the results with a similar fusion technique us-
ing BLE and WiFi proposed in (Galv´an-Tejada et al.,
2013). The technique uses multilateration technique
using the RSSI from both BLE and WiFi without us-
ing radio-mapping.
2 RELATED WORKS
A BLE and WiFi-based fusion technique is presented
in (Aparicio et al., 2008) that uses RSSI measurement
from both platforms. The proposed method creates
two sets of radio-maps using the RSSI measurement
from BLE and WiFi. The tracking area is divided into
crown-shaped regionsby considering differentthresh-
olds for RSSI values. In the fusion part, a crown-
shaped region is selected initially using the Bluetooth
radio-map. The WiFi radio-map is used for the final
position estimation inside the target zone. The aver-
age error reported is approximately 2.32 meters. A
similar RSSI based technique is proposed in (Apari-
cio et al., 2009) that uses RSSI from both WiFi and
BLE for fingerprinting. The technique calculates the
absolute difference of WiFi RSSI and BLE RSSI for
each position. It calculates the mini-max distance
between the points. Then the distance is calculated
by averaging the three nearest neighbors co-ordinates
and weights which are inversely proportional of the
distances among them. The reported error in the tech-
nique is 2.21 meter. Another technique has been pre-
sented in (Kanaris et al., 2017) that uses RSSI from
the WiFi to create the radio-map. The RSSI from the
BLE is used to calculate the distance from a particu-
lar BLE. Then, adding and subtracting a fixed toler-
ance with the distance, two circles are drawn from
BLE position. It creates a doughnuts shape region
inside the mapping area. The final position is esti-
mated by looking at the WiFi fingerprints inside the
doughnut-shaped region. The average position error
is reported to be 4.05 meters for 12 test points. A
training-freefusion technique is presented in (Galvan-
Tejada et al., 2012) which performs multilateration
using RSSI-distance equations. RSSI from WiFi and
BLE gives an estimation of distance which is used in
multilateration. In the analysis of the simulations, 400
iterations are performed with setups having 3 WiFi
and 1 BLE, 3 WiFi - 2 BLE, and 3 WiFi-5 BLE. The
result shows that 45% of the estimation have a po-
sition error of less than 1.839 meters. A similar ap-
proach is used in (Galv´an-Tejada et al., 2013) where
a regression model is developed using RSSI from 10
points ranging distances from 0.5 to 5 meter. The
model is used to estimate the distance from the RSSI.
The fusion technique uses a minimum of 8 equations
using RSSI from WiFi and BLE, and then the least
square solution is performed to estimate the final po-
sition. For 30 measurements in three locations, the
lowest total error achieved is 0.87 meters. Table 1
briefly shows work discussed above.
In previous research, WiFi and BLE are used for
RSSI based radio mapping/fingerprinting. Some of
the training-free techniques use the pathloss model to
estimate the distance. Fingerprinting techniques are
confined to indoor location, and the resolution of the
mapping dataset has an impact on the estimation per-
formance (Evennou and Marx, 2006). The process
requires a pre-profiling stage that requires an offline
session to create a dataset for indoor-locations. The
training process limits the easily deployable feature
of the training-based system. Moreover, any change
or movement of the furniture invalidates the offline
training data. On the other hand, the training-free
technique calculates distances using a path loss model
to estimate location using multilateration. The tech-
nique is independent of pre-profiling stage and uses
the RSSI from both BLE and WiFi. To the best of our
knowledge, till to-date, no fusion based framework
has used the CSI measurements. In this research, we
present an indoor location system that fuses the CSI
collected from a WiFi access point and the RSSI mea-
surements from multiple BLE beacons. Our goal is to
develop a cost-effective system using easily deploy-
able wireless device and BLE beacons. The clos-
est comparable technique discussed to ours is pre-
sented (Galv´an-Tejada et al., 2013), uses RSSI mea-
surements from both WiFi and BLE. It is a training-
free technique that calculates the distance from RSSI.
The lowest mean position errors it reports at three dif-
ferent points in an area surrounded by the BLE and
WiFi are 0.869 meters, 1.0112 meters, and 2.326 me-
ters. In the result section, we implement the technique
in the simulation and compare it with our proposed
fusion techniques.
3 SYSTEM OVERVIEW
In the proposed multi-radio fusion-based localization,
we use two properties of the incoming signals from
two different wireless platforms the CSI of the re-
ceived signal at the WiFi access point and RSSI mea-
surements at the user device. The CSI and RSSI val-
ues are sent to the cloud through the WiFi access-
point to perform the indoor localization. The user
learns the position through a smart-phone app con-
nected to the cloud.
Multi-radio Data Fusion for Indoor Localization using Bluetooth and WiFi
15
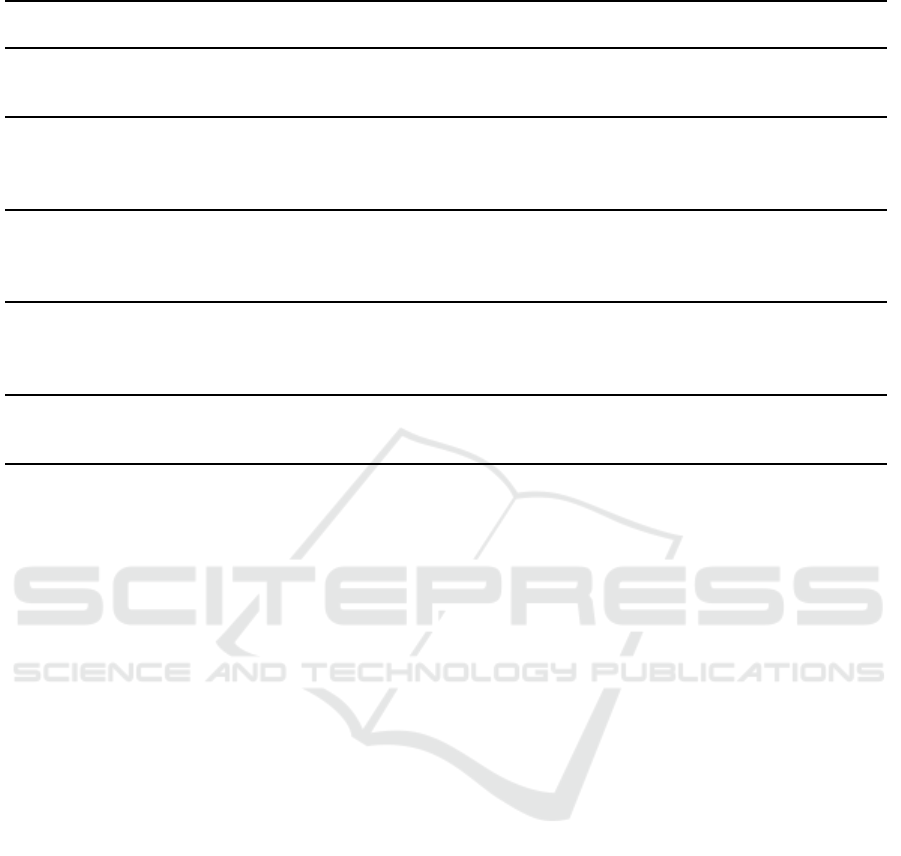
Table 1: Related works.
Article Year Bluetooth WiFi Radio
Map
Fusion Error
A Fusion Based on Bluetooth and
WLAN Technologies for Indoor
location(Aparicio et al., 2008).
2008 Radio-map
using
RSSI.
Radio-map
using
RSSI.
Required. Fingerprint
matching.
2.32 meter.
An Indoor Location Method Based
on a Fusion Map using Bluetooth
and WLAN Technologies (Apari-
cio et al., 2009).
2009 Radio-map
using
RSSI.
Radio-map
using
RSSI.
Required. Fingerprint
matching.
2.21 meter.
WiFi Bluetooth based combined
positioning algorithm (Galvan-
Tejada et al., 2012).
2012 Distance
form
RSSI.
Distance
form
RSSI.
Not re-
quired.
Multilateration. 45% results
has less than
1.839 meter
error.
Bluetooth-WiFi based combined
positioning algorithm, implemen-
tation and experimental evalua-
tion (Galv´an-Tejada et al., 2013).
2013 Distance
from
RSSI.
Distance
from
RSSI.
Not re-
quired.
Least square
solution.
Lowest total
error is 0.87
meter.
Fusing Bluetooth Data with WiFi
Radio-maps for Improved Indoor
Localization (Kanaris et al., 2017).
2017 Distance
form
RSSI.
Radio-map
using
RSSI.
Required. Fingerprint
matching.
Average 4.05
meter for 12
test points.
3.1 WiFi
In a previous study, a fast algorithm has been de-
veloped to estimate the AoA and ToF of the multi-
path signals using the CSI values at the WiFi access
point (Ahmed et al., 2018). The algorithm uses an up-
dated version of the high-resolution DoA estimation
algorithm, called the modified matrix pencil (MMP).
It significantly outperforms the 2D MUSIC (multiple
signal classification) algorithms used in (Kotaru et al.,
2015) by estimating the AoA and ToF at least 200
times faster. In both techniques, the high-resolution
algorithms are fed with CSI measurements in a modi-
fied matrix format. However, in 2D MUSIC it creates
a 2D grid of MUSIC spectrum to find the peaks that
correspond to AoA-ToF pairs of the multipath sig-
nals. While in MMP, it performs two 1-dimensional
solutions for AoA and ToF without creating any 2D
grid. It also pairs the AoA and ToF by using eigen
vector multiplication process. Both techniques pro-
vide an accurate estimation of the AoA with unreli-
able ToF. In the presence of noise and indoor multi-
path propagation, the estimation of ToF in nanosec-
ond scale is very challenging mainly because of the
presence of sampling-offsets and frequency-offsetsin
the commercial NICs. The differences between the
subcarrier frequencies are very small, and distance
traveled in indoor is also very short and do not create
a significant difference in the phases of the subcarri-
ers. However, the crude estimation of ToF helps to
determine the correct AoA. The smallest ToF repre-
sents the signal traveling in the direct path, although
it is not equal to the travel time of the signal (Kotaru
et al., 2015). In a uniformarray antenna, the estimated
AoA is called the projected AoA. If the antennas are
placed horizontally, the estimated AoA becomes the
vertical projection. The estimated AoA on a uniform
antenna array contains an array ambiguity (Gazzah
and Delmas, 2012). At the receiver, the carrier phase
measurements are generated using a frequency lock
loop (FLL). The FLL matches the frequency of the re-
ceived and the transmitted signals. The measurement
of the phase in CSI has a modulo of π, which leads to
another type of ambiguity, called the phase ambigu-
ity (Jacobs and Ralston, 1981; Teunissen, 2003). In
our fusion-based localization, we resolve these ambi-
guities in the estimated AoA by using the initial posi-
tion estimate given by the WCL.
3.2 Bluetooth
In the BLE network, we perform an initial position
estimation using the RSSI measurements from mul-
tiple BLE beacons. The initial position of the user
is estimated using the WCL technique. For the fu-
sion technique, we estimate the distance between the
receiver and the BLE beacons using the log-normal
shadowing pathloss model (B¨uy¨ukc¸orak et al., 2015).
In the log-normal shadowing model, the distribution
of RSSI is approximated by a Gaussian in the loga-
rithmic domain (Zanca et al., 2008; Ergen et al., 2014;
Yiu et al., 2016).
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
16

Figure 1: The true AoA and target position, the AoA es-
timated from WiFi CSI, and the target position estimated
from BLE beacon RSSIs.
3.3 Fusion
We use the estimated AoA and RSSI measurements in
the fusion model development. The steps in the fusion
model development are mentioned below.
3.3.1 Step 1
In the first step, we resolve the array and phase am-
biguities in the estimated AoA. The estimated AoA
has three ambiguities. For an estimated AoA, θ,
the phase-periodic ambiguity is π ±θ and the phase-
symmetric ambiguity is ±θ. The phase-periodic am-
biguity also has its symmetric ambiguity. These AoA
ambiguities are resolved with the help of the initial
position estimation using WCL. We select the angle
for AoA that creates the least difference with the an-
gle of the initial position estimate.
3.3.2 Step 2
In the second step, we use the AoA and RSSI mea-
surements to develop a fusion technique based on
maximum-likelihood estimation. To this end, we
maximize the product of the PDFs of the RSSI-
induced distances and the estimated AoA.
We model the PDF of the AoA as Gaussian. The
approximation is based on a simulation analysis dis-
cussed in the next section. To evaluate the fusion tech-
nique, we consider two choices for the variance of the
AoA, the theoretical value based on the Cramer-Rao
lower bound (CRLB), and the measured value. The
CRLB givesthe minimum achievable variance for any
unbiased estimator. The unbiased variance is least
noisy and in this study we use the CRLB variance to
test the performance of the fusion technique. We also
calculate the measured variance through simulations
with known position and AoA.
4 MULTI-RADIO FUSION
ARCHITECTURE
4.1 PDF of BLE RSSI
Let us consider q BLE beacons deployed in an area
having the same height as the target node. The target
node and the BLE beacons have isotropic antennas.
The set of BLE beacons is U = {A
1
,A
2
,··· ,A
q
}. The
2-D locations of the BLE beacons are known and the
location set is u = {a
1
,a
2
,··· ,a
q
}, where a
i
= (x
i
,y
i
).
Let the position of the target node be b = (x,y). Let
R
i
(dBm) be the RSSI of the ith beacon at the target
node without any noise, i.e. R
i
(dBm) = 10log
10
R
i
.
The symbol R
i
(dBm) represents the RSSI in decibel-
milliwatt and R
i
in milliwatt. At any given time, the
target node receives signals from p number of BLE
beacons. The active set of BLE beacons is V ⊆ U.
The goal is to estimate the position of the target node
b.
The measured RSSI from the i
th
beacon is
˜
R
i
(dBm), which includes noise. The noise in
˜
R
i
(dBm)
is additive zero-mean Gaussian with standard devia-
tion (STD) σ
R
i
. Therefore, we have
˜
R
i
(dBm) = R
i
(dBm) + n
R
i
n
R
i
∼ N (0,σ
2
R
i
).
RSSI distance measurement uses the logarithmic dis-
tance path-loss model (Golestani et al., 2014; Nowak
et al., 2016; Nguyen et al., 2011). It is expressed as
˜
R
i
(dBm) = R
0
(dBm) −10η
p
log
10
(d
i
/d
0
) + n
R
i
(1)
here d
i
=
p
(x−x
i
)
2
+ (y −y
i
)
2
, and R
0
(dBm) is the
power received at a reference distance d
0
. The param-
eter η
p
is the pathloss co-efficient that depends on the
environment. In most cases, η
p
is estimated from the
prior measurements. The PDF of the RSSI measure-
ment from the i
th
BLE is:
p(
˜
R
i
(dBm)) =
1
√
2πσ
R
i
e
−
(
˜
R
i
(dBm)−R
i
(dBm)
)
2
2σ
2
R
i
(2)
Substituting (1) into (2) gives
p(
˜
d
i
) =
ξ
d
i
√
2πσ
R
i
e
"
−
v
8
log
d
2
i
˜
d
i
2
2
#
. (3)
here ξ = 10/ln10 = 4.3429, v =
10η
p
σ
R
i
ln10
2
,
˜
d
i
is the
distance calculated from
˜
R
i
(dBm).
Multi-radio Data Fusion for Indoor Localization using Bluetooth and WiFi
17

4.2 Weighted Centroid Localization
We use the WCL to calculate the initial values of x
and y. The WCL is a localization technique that esti-
mates the position by assigning weights to each BLE
beacon and taking the weighted average of their RSSI
values. The weightes are assigned based on the tech-
nique discussed in the literature review (Blumenthal
et al., 2007). The estimated position of the target node
is given by the WCL algorithm considered:
x
0
=
p
∑
i=1
w
i
x
i
p
∑
i=1
w
i
,
y
0
=
p
∑
i=1
w
i
y
i
p
∑
i=1
w
i
.
here w
i
is the assigned weight for the ith BLE beacon.
4.3 PDF of WiFi AoA
Let us consider that the target node is connected to
a WiFi access point and sends a signal in the uplink.
Let τ and θ be the ToF and AoA of the uplink signal.
The WiFi access point has three antennas separated
by a distance l, and each of the antennas receives n
narrow-band signals, one for each of the subcarriers
whose frequencies are separated by δ. WiFi uses
OFDM (orthogonal frequency-division multiplexing)
modulation, where the signal gets divided into mul-
tiple narrow-band signals and transmitted over the
channel. Let us denote the CSI value of the subcarrier
with the lowest frequency on the first antenna by
the complex number γ. It then follows that the CSI
value of the s
th
subcarrier received at the a
th
antenna
is γg
a−1
h
s−1
where g = exp
2π jlλ
−1
sinθ
and
h = exp(2πjδτ). Let f
θ
= lλ
−1
sinθ, which gives
g = exp(2π j f
θ
). Let ρ and ψ be the amplitude and
phase of γ, respectively. Let us assume that there
is only one line-of-sight signal, and the multipath
signals are weak and do not effect the CSI mea-
surements. The work on CSI based AoA estimation
proposed earlier shows the procedure of finding the
real AoA of the target user in case there a multipath
dominating multi paths affecting the CSI measure-
ments (Ahmed et al., 2018). Here, for simplicity,
we assume there is only one existing AoA in the CSI
measurements. Using MMP, we estimate the AoA
of the uplink signal. The CSI values associated with
all three antennas and n sub-carriers for only one
incoming signal can be collected in the CSI matrix as
C
′
=
1
g
g
2
γ
1 h ··· h
n−1
.
Let us assume N
w
be the environment noise. N
w
has
a dimension of (3 ×n). Therefore, noisy CSI can be
expressed as
C = C
′
+ N
w
.
In the previous research in (Ahmed et al., 2018),
this C
′
matrix is used to estimate the AoA and ToF
of the incoming signals, including multipath. The ar-
ticle also discusses the technique to differentiate the
line of sight or direct path signal using the ToF esti-
mation. The presence of multipath signals inside the
CSI dataset results in multiple AoAs. The shortest
ToF represents the line-of-sight or the direct-path sig-
nal.
We assume that the estimation of AoA is unbiased.
In the next section, it is shown that the empirical dis-
tribution of estimated AoA in a noisy environment is
very close to Gaussian. Therefore, the PDF of the es-
timated AoA is
p(θ) =
1
√
2πσ
θ
exp
−
(θ−
ˆ
θ)
2
2σ
2
θ
!
. (4)
here σ
θ
is the STD and
ˆ
θ is the estimated mean of
AoA. The STD of the AoA is calculated from a num-
ber of estimated AoAs at known angles. We assume
the WiFi access point is positioned at the origin and
θ = tan
−1
y
x
.
4.4 Fusion Technique
Let us assume that the errors for AoA and distance are
independent. The log likelihood function of the prod-
uct of distance and AoA PDFs given in (3) and (4)
is,
L(x,y) =ln
1
√
2πσ
θ
exp
−
tan
−1
y
x
−
ˆ
θ
2
2σ
2
θ
!!
+
p
∑
i=1
ln
ξ
σ
˜
R
i
p
2π((x−x
i
)
2
+ (y −y
i
)
2
)
exp
"
−
v
8
log
d
2
i
˜
d
2
i
2
#!
.
L(x,y) is twice continuously differentiable with re-
spect to the variables. We estimate the values of (x, y)
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
18

by maximizing the function. Therefore, the optimiza-
tion problem can be expressed as
max
x,y
"
ln
1
√
2πσ
θ
exp
−
tan
−1
y
x
−
ˆ
θ
2
2σ
2
θ
!!
+
p
∑
i=1
ln
ξ
d
i
√
2πσ
˜
R
i
e
"
−
v
8
log
d
2
i
˜
d
i
2
2
#
#
.
The equation above is a nonlinear optimization prob-
lem without any constraints. We calculate first and
second order derivatives to find the value of x and y
that maximizes the equation.
We determine the Hessian matrix of L(x,y). The
Hessian matrix is (see Appendix A)
∇
2
L =
"
∂
2
L
∂x
2
∂
2
L
∂y∂x
∂
2
L
∂x∂y
∂
2
L
∂y
2
#
We use the Newton’s algorithm to solve the above
problem. At each iteration of the algorithm, we solve
the following system of linear equations:
∂
2
L
∂x
2
∂
2
L
∂y∂x
∂
2
L
∂x∂y
∂
2
L
∂y
2
!
δx
δy
=
∂L
∂x
∂L
∂y
!
here, L denotes the log-likelihood (objective) func-
tion. Then, the estimates are updated as ( ˆx, ˆy) →
( ˆx + δx, ˆy + δy). The iterations are continued until
(δx,δy) becomes small.
4.5 CRLB Calculation
The STDs σ
θ
and σ
˜
R
i
in L(x,y) are the parameter
known from prior measurements. It also can be cal-
culated using some initial measurements. Change of
STDs value also changes the accuracy of the loca-
tion estimation. In this sub-section, we calculate the
CRLB of the STDs using the known values of dis-
tances and AoA. The CRLB variance of (3) is the
same as the minimum variance of noise n
R
i
. There-
fore, we write σ
R
i
,cr
is the CRLB STD.
4.5.1 CRLB of WiFi AoA
In WiFi, the unknown parameters are γ, φ, θ and τ
(see section 4.3). In practice, we only need the value
of θ but for that we need to calculate the Fisher in-
formation matrix (FIM), which contains all the other
unknown parameters. For the AoA estimation, the un-
known parameter vector κ is:
κ = [γ, φ,θ,τ]
T
.
Therefore, the PDF of C
′
as in (Hua, 1992) is
p(C
′
|κ) =
1
(2πσ
2
w
)
MN
exp
−
1
σ
2
w
||C
′
−C||
2
here ||.|| donates the 2-norm, σ
2
w
is the variance of
the noise, and κ is a 4I ×1 vector of unknown, I is
the number 2-D sinusoids in the CSI dataset, M is the
number of antenna elements, and N is the number of
subcarriers. Hence, the log-likelihood function is:
L(κ|C
′
) = ln(p(C
′
|ρ,φ,θ,τ)).
Therefore, the corresponding FIM is:
F
i, j
= −E
∂
2
L(C
′
|κ)
∂κ
i
∂κ
j
,
F
ij
=
2
σ
2
w
Re
∂C
′H
∂κ
i
∂C
∂κ
j
.
here Re[.] denotes the real part, F(κ) is a 4I ×4I ma-
trix and, F
ij
is the (i, j)th entry of F.
In (Hua, 1992), the FIM has been derived for m
antenna arrays and n subcarriers as (see Appendix B)
F =
F
ρρ
F
ρφ
F
ρθ
F
ρτ
F
T
ρφ
F
φφ
F
φθ
F
φτ
F
T
ρθ
F
T
φθ
F
θθ
F
θτ
F
T
ρτ
F
T
φτ
F
T
θτ
F
ττ
. (5)
The square root of the third diagonal element of F
−1
corresponds to the CRLB of AoA. Let σ
θ,cr
be the
CRLB STD of the estimated AoA.
Replacing σ
θ
with σ
θ,cr
in (4) gives:
p(x,y) =
1
√
2πσ
θ,cr
exp
−
tan
−1
y
x
−
ˆ
θ
2
2σ
2
θ,cr
!
. (6)
5 SIMULATION AND RESULTS
We develop a 2D model simulation model using
MATLAB. The simulation model considers an area
of 20m x 20m with 20 BLE beacons and one WiFi
access point. The current setup of the simulation is
considering 2D localization in a 2D plane. Azimuth
angle for indoor localization is not that important and
it does not have any significant effect in indoor posi-
tioning (Seong et al., 2019).
The WiFi access point is positioned in the cen-
ter of the simulation area. The BLE beacons are ran-
domly positioned with in the simulation area. The
frequency band in WiFi is channel one in 2.4 GHz
band. In an indoor environment, signal has 5-8 strong
multipaths(Kotaru et al., 2015). In our simulation,
we consider 5 multipaths in indoor environment. The
Multi-radio Data Fusion for Indoor Localization using Bluetooth and WiFi
19
-10 -8 -6 -4 -2 0 2 4 6 8 10
-10
-8
-6
-4
-2
0
2
4
6
8
10
Real position
BLE position
Real AoA
Array ambiguity
Phase ambiguity
Array-Phase ambiguity
Figure 2: WiFi AoA estimation with ambiguity in the func-
tioning area.
magnitude of the multipath signal is obtained using
3D wireless prediction software - Wireless insite(wir,
). The details of the simulation using Wireless-Insite
is shown earlier research in (Ahmed et al., 2018). For
every initial position estimation using WCL, we select
six BLEs with the highest RSSI values. The simula-
tion parameters are given in Table 2. Figure 2 shows
the ambiguities of the estimated AoA and initial esti-
mated position inside the simulation area.
Table 2: System Parameters.
Parameters/Variables Properties
Area 20m x 20m
Number of BLE beacons 20
Number of BLE beacons used
for localization
6
Frequency 2403.0225 MHz
Number of subcarrier 30
Number of WiFi antenna 3
Subcarrier spacing 0.630 MHz
SNR (WiFi) 15 dB
Number of Multi-path 5
Transmission Power -12 dBm
Received power at 1 m distance -77 dBm
Pathloss co-efficient, η
p
1.8
BLE std 3 dB
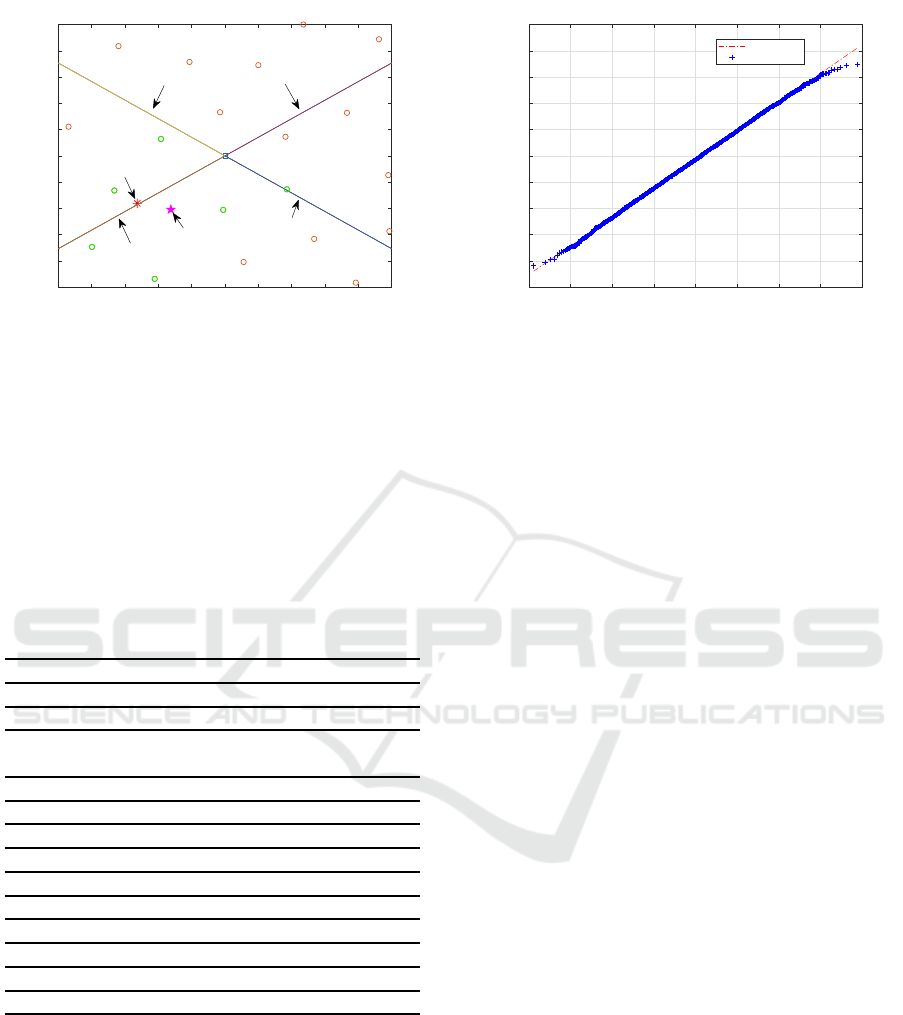
5.1 Distribution of Estimated AoA
Error
We calculate the AoA estimation error for 10000 trails
with a 15 dB signal to noise ratio (SNR). In each sim-
ulation, we randomly distribute the target node and
calculate the noisy CSI data. All the simulations we
performed having the target node at a 30-degree an-
gle from the WiFi access point. Figure 3 QQ plot
-4 -3 -2 -1 0 1 2 3 4
Standard Normal Quantiles
27.5
28
28.5
29
29.5
30
30.5
31
31.5
32
32.5
Quantiles of Input Sample
standard line
measured data
Figure 3: QQplot test.
is a graphical method for comparing two probability
distributions by plotting their quantiles against each
other. Figure 3 illustrates that the distribution of the
AoA is in good agreement with a normal distribution.
The mean estimated AoA is 29.93-degree.
5.2 Performance of the Proposed
Techniques
We ran 10000 independent trials using both the the-
oretical (CRLB) and measured variances. In each
trial, the BLE beacon and target node positions are
arbitrarily selected. We consider zero-mean Gaus-
sian noise in the RSSI. Figure 4 shows the cumulative
distribution function (CDF) of the position error us-
ing PDFs having four possible combination of CRLB
and measured variances. From the figure, we can
see that the proposed technique performs best with
both PDFs having variances as measured variances.
The root-mean-square-error (RMSE) of position with
measured variances of 3.35-degree is 1.89 meters. Ta-
ble 3 shows the estimated position error in meters as
RMSE for different combinations of CRLB and mea-
sured variances in the PDFs. However, if we con-
sider 80% of the estimation with higher accuracy, the
fusion technique using CRLB variance in BLE PDF
shows a better performance. It also performs better
for position estimation with 3-meter error tolerance.
CRLB variance of AoA requires the values of ρ, φ,
θ, and τ. In practice, it is not feasible to estimate the
values of all these variables. Estimation of τ is possi-
ble by using precise and sophisticated measurements
of the signal’s travel-time. However, the values of ρ
and φ cannot be calculated using a commercial NIC.
Therefore, CRLB variance cannot be used in prac-
tice. The proposed fusion technique uses the variance
of the RSSI and variance of the AoA in the PDFs.
Change of the AoA variance does not have a signifi-
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
20
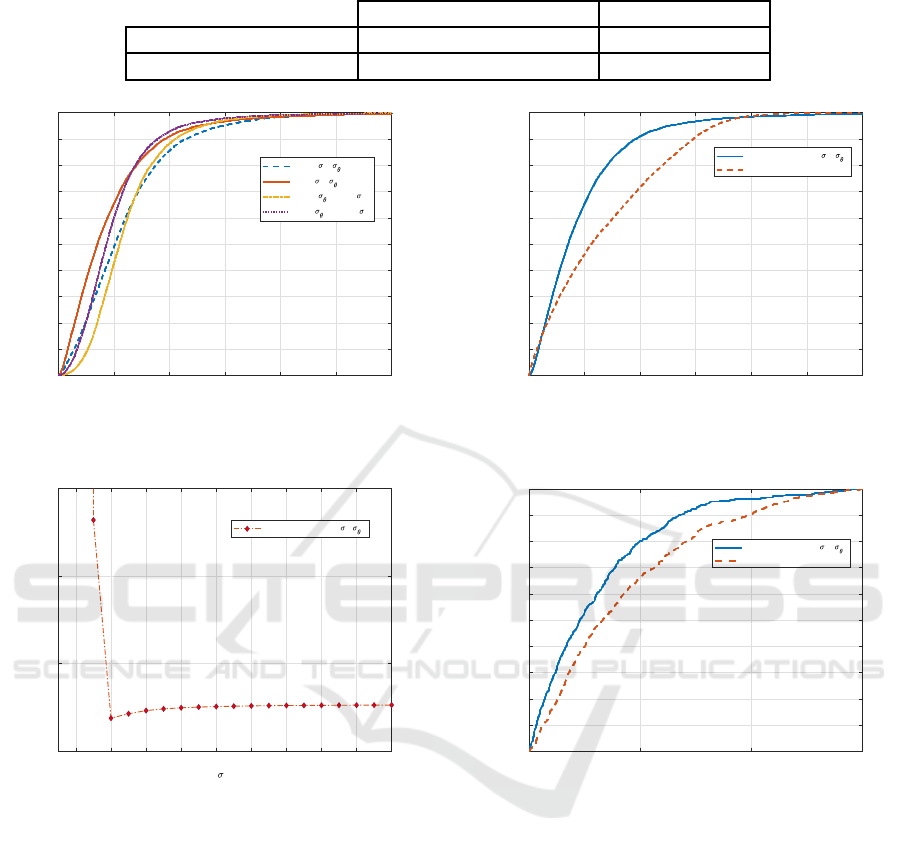
Table 3: Estimated position error for different variance (RMSE).
AoA CRLB variance, σ
2
θ,cr
AoA variance, σ
2
˜
θ
RSSI CRLB variance, σ
2
R,cr
2.4176 meter 2.4970 meter
RSSI variance, σ
2
˜
R
2.0320 meter 1.8884 meter
0 2 4 6 8 10 12
estimated position error (m)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
CDF
CRLB (
R
,
)
EST. (
R
,
)
CRLB ( ), EST. (
R
)
EST. ( ), CRLB. (
R
)
Figure 4: CDF of position error of two techniques using
CRLB variances.
1 2 3 4 5 6 7 8 9 10
est.
R
(dB)
0
5
10
15
estimated position error (m)
distance-AoA (EST. [
R
,
])
Figure 5: estimated σ
˜
R
vs estimated position error.
cant effect on the estimation performance. However,
changing the variances of RSSI from CRLB to ’mea-
sured’ improves the position error by 40 cm, approx-
imately. In Figure 5, we show an estimation perfor-
mance for a range of σ
˜
R
(RSSI STD) values. The
range of σ
˜
R
is between 0.5 dB and 10 dB with 0.5
dB steps. The position errors with σ
˜
R
are measured
as the average of RMSE for 10000 trials. For the val-
ues below 2 dB, the position error is large while it
decreases rapidly at 2 dB point. After 2dB, the error
graph remains almost flat until the end. In our calcu-
lations, the value of CRLB RSSI STD, σ
R,cr
, is fre-
quently lower than 2 dB while estimated STD, σ
˜
R
, is
frequently higher than the 2 dB. It leads to a higher
accuracy in position estimation using the estimated
variance of RSSI. In practical scenarios, σ
˜
R
can be
measure by taking multiple RSSI measurements at a
0 2 4 6 8 10 12
estimated position error (m)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
CDF
distance-AoA [EST. (
R
,
)]
multilateration
Figure 6: CDF of position error of distance-AoA fusion and
multilateration.
0 5 10 15
estimated position error (m)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
CDF
Empirical CDF
distance-AoA [EST. (
R
,
)]
multilateration
Figure 7: CDF of position error of distance-AoA fusion and
multilateration for 30m×30m scenario.
fixed position and σ
˜
θ
can be measured by taking mul-
tiple AoA estimation at a fixed angle.
5.3 Comparison
The most similar technique discussed earlier esti-
mates the location of the target node using the RSSI
from both BLE and WiFi access point (Galv´an-Tejada
et al., 2013). We implement this technique us-
ing RSSI at the WiFi access point along with RSSI
received from BLE beacons. We use the multi-
lateration technique on the calculated distance from
the RSSI measurements and compare the estimation
performance with our proposed fusion technique. We
use the best performing combination of the variances
for the proposed fusion technique. The performance
Multi-radio Data Fusion for Indoor Localization using Bluetooth and WiFi
21

comparison is shown in Figure 6. The CDF of esti-
mated position error reduces the RMSE of the esti-
mated position by almost 30% from 2.7450 meters to
1.8884 meters. Figure 7 shows the CDF of estimated
position error when the simulation area has been in-
creased to 30m×30m and the number of BLE beacon
has been increased to 30. The mean error of the fu-
sion technique is 3.0883 meters and for multilatera-
tion based technique its 4.2658 meters.
6 CONCLUSION
Position estimation using RSSI has high estimation
error due to its random fluctuation in the indoor envi-
ronment. On the other hand, estimation of AoA using
CSI data has ambiguities. In our proposed multi-radio
fusion framework, we combine RSSI and CSI mea-
surements to develop a technique that overcomes the
limitation of these two wireless platforms. We used
the CSI from WiFi for the first time in the fusion-
based location estimation technique. CSI based tech-
niques are complex but accurate, while RSSI based
techniques are less scalable, and the localization per-
formance vastly depends on the number and strategy
of beacon deployment. From the BLE RSSI measure-
ments, we estimate a position using the MLE solu-
tion considering the log-normal shadowing pathloss
model. In WiFi, we use MMP algorithm on the CSI
data to estimate the AoA. We propose a fusion tech-
nique using the RSSI and CSI measurements. We es-
timate an initial position using WCL to remove the
ambiguities of the estimated AoA. In the fusion tech-
nique, we use the PDFs of the estimated distance and
AoA. The distances are calculated using the RSSI
measurements. We present a performance analysis of
the fusion technique using a different combination of
CRLB variances and measured variances for both dis-
tance and AoA in the PDFs. The performance anal-
ysis shows that the fusion technique performs better
with both PDF using the measured variances. More-
over, the technique performs 30% better than the most
similar fusion based technique using BLE and WiFi.
In future work, we will investigate the prospect of in-
tegrating the information available from the neighbor-
ing WiFi access points to improve the localization ac-
curacy.
REFERENCES
Wireless InSite - 3D Wireless Prediction Software,
https://www.remcom.com/wireless-insite-em-
propagation-software/. Accessed 10 Sep. 2016.
Ahmed, A., Arablouei, R., de Hoog, F., Kusy, B., Ju-
rdak, R., and Bergmann, N. (2018). Estimating
angle-of-arrival and time-of-flight for multipath com-
ponents using wifi channel state information. Sensors,
18(6):1753.
Aparicio, S., P´erez, J., Bernardos, A. M., and Casar, J. R.
(2008). A fusion method based on bluetooth and wlan
technologies for indoor location. In IEEE Interna-
tional Conference on Multisensor Fusion and Integra-
tion for Intelligent Systems, pages 487–491. IEEE.
Aparicio, S., P´erez, J., Tarr´ıo, P., Bernardos, A. M., and
Casar, J. R. (2009). An indoor location method
based on a fusion map using bluetooth and wlan tech-
nologies. In International Symposium on Distributed
Computing and Artificial Intelligence, pages 702–710.
Springer.
Blumenthal, J., Grossmann, R., Golatowski, F., and Tim-
mermann, D. (2007). Weighted centroid localization
in zigbee-based sensor networks. In IEEE Interna-
tional Symposium on Intelligent Signal Processing,
pages 1–6. IEEE.
B¨uy¨ukc¸orak, S., Vural, M., and Kurt, G. K. (2015). Lognor-
mal mixture shadowing. IEEE Transactions on Vehic-
ular Technology, 64(10):4386–4398.
Chan, Y. W. E. and Soong, B.-H. (2016). Discrete weighted
centroid localization (dwcl): Performance analysis
and optimization. IEEE Access, 4:6283–6294.
Chang, Q., Van de Velde, S., Wang, W., Li, Q., Hou, H., and
Heidi, S. (2015). Wi-fi fingerprint positioning updated
by pedestrian dead reckoning for mobile phone indoor
localization. In China Satellite Navigation Conference
(CSNC) 2015 Proceedings: Volume III, pages 729–
739. Springer.
Chen, L.-H., Wu, E. H.-K., Jin, M.-H., and Chen, G.-H.
(2014). Intelligent fusion of wi-fi and inertial sensor-
based positioning systems for indoor pedestrian navi-
gation. IEEE Sensors Journal, 14(11):4034–4042.
Choi, B.-S., Lee, J.-W., Lee, J.-J., and Park, K.-T. (2011).
A hierarchical algorithm for indoor mobile robot lo-
calization using rfid sensor fusion. IEEE Transactions
on Industrial Electronics, 58(6):2226–2235.
Dobrev, Y., Flores, S., and Vossiek, M. (2016). Multi-modal
sensor fusion for indoor mobile robot pose estimation.
In IEEE/ION Position, Location and Navigation Sym-
posium (PLANS), pages 553–556. IEEE.
Ergen, S. C., Tetikol, H. S., Kontik, M., Sevlian, R.,
Rajagopal, R., and Varaiya, P. (2014). Rssi-
fingerprinting-based mobile phone localization with
route constraints. IEEE Transactions on Vehicular
Technology, 63(1):423–428.
Evennou, F. and Marx, F. (2006). Advanced integration of
wifi and inertial navigation systems for indoor mobile
positioning. EURASIP journal on applied signal pro-
cessing, 2006:164–164.
Fang, L., Antsaklis, P. J., Montestruque, L. A., McMickell,
M. B., Lemmon, M., Sun, Y., Fang, H., Koutroulis,
I., Haenggi, M., Xie, M., et al. (2005). Design of a
wireless assisted pedestrian dead reckoning system-
the navmote experience. IEEE transactions on Instru-
mentation and Measurement, 54(6):2342–2358.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
22

Gallagher, T., Wise, E., Li, B., Dempster, A. G., Rizos, C.,
and Ramsey-Stewart, E. (2012). Indoor positioning
system based on sensor fusion for the blind and visu-
ally impaired. In International Conference on Indoor
Positioning and Indoor Navigation (IPIN), pages 1–9.
IEEE.
Galv´an-Tejada, C. E., Carrasco-Jim´enez, J. C., and Brena,
R. F. (2013). Bluetooth-wifi based combined position-
ing algorithm, implementation and experimental eval-
uation. Procedia Technology, 7:37–45.
Galvan-Tejada, I., Sandoval, E. I., Brena, R., et al. (2012).
Wifi bluetooth based combined positioning algorithm.
Procedia Engineering, 35:101–108.
Gazzah, H. and Delmas, J.-P. (2012). Direction finding an-
tenna arrays for the randomly located source. IEEE
Transactions on Signal Processing, 60(11):6063–
6068.
Gezici, S., Tian, Z., Giannakis, G. B., Kobayashi, H.,
Molisch, A. F., Poor, H. V., and Sahinoglu, Z. (2005).
Localization via ultra-wideband radios: a look at posi-
tioning aspects for future sensor networks. IEEE sig-
nal processing magazine, 22(4):70–84.
Golestani, A., Petreska, N., Wilfert, D., and Zimmer, C.
(2014). Improving the precision of rssi-based low-
energy localization using path loss exponent estima-
tion. In 2014 11th Workshop on Positioning, Naviga-
tion and Communication (WPNC), pages 1–6. IEEE.
Gu, F., Niu, J., and Duan, L. (2017). Waipo: A fusion-based
collaborative indoor localization system on smart-
phones. IEEE/ACM Transactions on Networking,
25(4):2267–2280.
Gustafsson, F., Gunnarsson, F., Bergman, N., Forssell,
U., Jansson, J., Karlsson, R., and Nordlund, P.-J.
(2002). Particle filters for positioning, navigation, and
tracking. IEEE Transactions on signal processing,
50(2):425–437.
Hilsenbeck, S., Bobkov, D., Schroth, G., Huitl, R., and
Steinbach, E. (2014). Graph-based data fusion of pe-
dometer and wifi measurements for mobile indoor po-
sitioning. In Proceedings of the 2014 ACM interna-
tional joint conference on pervasive and ubiquitous
computing, pages 147–158. ACM.
Hua, Y. (1992). Estimating two-dimensional frequencies by
matrix enhancement and matrix pencil. IEEE Trans-
actions on Signal Processing, 40(9):2267–2280.
Jacobs, E. and Ralston, E. W. (1981). Ambiguity resolution
in interferometry. IEEE Transactions on Aerospace
and Electronic Systems, (6):766–780.
Jiao, J., Li, F., Tang, W., Deng, Z., and Cao, J. (2018). A
hybrid fusion of wireless signals and rgb image for in-
door positioning. International Journal of Distributed
Sensor Networks, 14(2):1550147718757664.
Kanaris, L., Kokkinis, A., Liotta, A., and Stavrou, S.
(2017). Fusing bluetooth beacon data with wi-fi ra-
diomaps for improved indoor localization. Sensors,
17(4):812.
Karim, L., Nasser, N., and El Salti, T. (2010). Relma:
a range free localization approach using mobile an-
chor node for wireless sensor networks. In Global
Telecommunications Conference (IEEE GLOBECOM
2010, pages 1–5. IEEE.
Koo, B., Lee, S., Lee, M., Lee, D., Lee, S., and Kim,
S. (2014). Pdr/fingerprinting fusion indoor location
tracking using rss recovery and clustering. In Interna-
tional Conference on Indoor Positioning and Indoor
Navigation (IPIN), pages 699–704. IEEE.
Kotaru, M., Joshi, K., Bharadia, D., and Katti, S. (2015).
Spotfi: Decimeter level localization using wifi. In
ACM SIGCOMM Computer Communication Review,
volume 45, pages 269–282. ACM.
Kuban, D. A., Dong, L., Cheung, R., Strom, E., and
De Crevoisier, R. (2005). Ultrasound-based localiza-
tion. In Seminars in radiation oncology, volume 15,
pages 180–191. Elsevier.
Laurendeau, C. and Barbeau, M. (2009). Centroid local-
ization of uncooperative nodes in wireless networks
using a relative span weighting method. EURASIP
Journal on Wireless Communications and Network-
ing, 2010(1):567040.
Lepp¨akoski, H., Collin, J., and Takala, J. (2013). Pedestrian
navigation based on inertial sensors, indoor map, and
wlan signals. Journal of Signal Processing Systems,
71(3):287–296.
Li, Y., Zhuang, Y., Zhang, P., Lan, H., Niu, X.,
and El-Sheimy, N. (2017). An improved iner-
tial/wifi/magnetic fusion structure for indoor naviga-
tion. Information Fusion, 34:101–119.
Lim, C.-H., Wan, Y., Ng, B.-P., and See, C.-M. S. (2007).
A real-time indoor wifi localization system utilizing
smart antennas. IEEE Transactions on Consumer
Electronics, 53(2).
Lin, T., Li, L., and Lachapelle, G. (2015). Multiple sen-
sors integration for pedestrian indoor navigation. In
International Conference on Indoor Positioning and
Indoor Navigation (IPIN), pages 1–9. IEEE.
Liu, M., Chen, R., Li, D., Chen, Y., Guo, G., Cao, Z., and
Pan, Y. (2017). Scene recognition for indoor localiza-
tion using a multi-sensor fusion approach. Sensors,
17(12):2847.
Luo, R. C. and Chen, O. (2013). Wireless and pyroelectric
sensory fusion system for indoor human/robot local-
ization and monitoring. IEEE/ASME Transactions on
mechatronics, 18(3):845–853.
Luo, R. C. and Lai, C. C. (2012). Enriched indoor map
construction based on multisensor fusion approach for
intelligent service robot. IEEE Transactions on Indus-
trial Electronics, 59(8):3135–3145.
Mirowski, P., Ho, T. K., Yi, S., and MacDonald, M. (2013).
Signalslam: Simultaneous localization and mapping
with mixed wifi, bluetooth, lte and magnetic signals.
In International Conference on Indoor Positioning
and Indoor Navigation (IPIN), pages 1–10. IEEE.
Nguyen, H. A., Guo, H., and Low, K.-S. (2011). Real-
time estimation of sensor node’s position using par-
ticle swarm optimization with log-barrier constraint.
IEEE Transactions on Instrumentation and Measure-
ment, 60(11):3619–3628.
Nowak, T., Hartmann, M., Zech, T., and Thielecke, J.
(2016). A path loss and fading model for rssi-based
Multi-radio Data Fusion for Indoor Localization using Bluetooth and WiFi
23

localization in forested areas. In2016 IEEE-APS Topi-
cal Conference on Antennas and Propagation in Wire-
less Communications (APWC), pages 110–113. IEEE.
Papaioannou, S., Wen, H., Markham, A., and Trigoni, N.
(2014). Fusion of radio and camera sensor data for
accurate indoor positioning. In IEEE 11th Interna-
tional Conference on Mobile Ad Hoc and Sensor Sys-
tems (MASS), pages 109–117. IEEE.
Qi, H. and Moore, J. B. (2002). Direct kalman filtering
approach for gps/ins integration. IEEE Transactions
on Aerospace and Electronic Systems, 38(2):687–693.
Seong, J.-H., Lee, S.-H., Yoon, K.-K., and Seo, D.-H.
(2019). Ellipse coefficient map-based geomagnetic
fingerprint considering azimuth angles. Symmetry,
11(5):708.
Tarr´ıo, P., Cesana, M., Tagliasacchi, M., Redondi, A., Bor-
sani, L., and Casar, J. R. (2011). An energy-efficient
strategy for combined rss-pdr indoor localization. In
IEEE International Conference on Pervasive Com-
puting and Communications Workshops (PERCOM
Workshops), pages 619–624. IEEE.
Teunissen, P. (2003). Theory of carrier phase ambiguity
resolution. Wuhan University Journal of Natural Sci-
ences, 8(2):471.
Yiu, S., Dashti, M., Claussen, H., and Perez-Cruz, F. (2016).
Locating user equipments and access points using rssi
fingerprints: A gaussian process approach. In IEEE
International Conference on Communications (ICC),
pages 1–6. IEEE.
Zanca, G., Zorzi, F., Zanella, A., and Zorzi, M. (2008). Ex-
perimental comparison of rssi-based localization al-
gorithms for indoor wireless sensor networks. In Pro-
ceedings of the workshop on Real-world wireless sen-
sor networks, pages 1–5. ACM.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
24
