
Farm Detection based on Deep Convolutional Neural Nets
and Semi-supervised Green Texture Detection using
VIS-NIR Satellite Image
Sara Sharifzadeh
1a
, Jagati Tata
1
and Bo Tan
2b
1
Faculty of Engineering, Environment and Computing, Coventry University, Gulson Rd, Coventry CV1 2JH, U.K.
2
Faculty of Information Technology and Communication Sciences, Tampere University, Tampere, Finland
Keywords: Classification, Supervised Feature Extraction, Convolutional Neural Nets (CNNs), Satellite Image, Digital
Agriculture.
Abstract: Farm detection using low resolution satellite images is an important topic in digital agriculture. However, it
has not received enough attention compared to high-resolution images. Although high resolution images are
more efficient for detection of land cover components, the analysis of low-resolution images are yet important
due to the low-resolution repositories of the past satellite images used for timeseries analysis, free availability
and economic concerns. The current paper addresses the problem of farm detection using low resolution
satellite images. In digital agriculture, farm detection has significant role for key applications such as crop
yield monitoring. Two main categories of object detection strategies are studied and compared in this paper;
First, a two-step semi-supervised methodology is developed using traditional manual feature extraction and
modelling techniques; the developed methodology uses the Normalized Difference Moisture Index (NDMI),
Grey Level Co-occurrence Matrix (GLCM), 2-D Discrete Cosine Transform (DCT) and morphological
features and Support Vector Machine (SVM) for classifier modelling. In the second strategy, high-level
features learnt from the massive filter banks of deep Convolutional Neural Networks (CNNs) are utilised.
Transfer learning strategies are employed for pretrained Visual Geometry Group Network (VGG-16)
networks. Results show the superiority of the high-level features for classification of farm regions.
1 INTRODUCTION
Land cover classification and object-specific
classification using Earth’s observing satellites have
been some of the most important applications of
remote sensing. In digital agriculture domain, farm
detection is a key factor for different applications
such as diagnosis of diseases and welfare-
impairments, crop yield monitoring and surveillance
and control of micro-environmental conditions an
important topic in digital agriculture domain
(Stephanie Van Weyenberg, Iver Thysen, Carina
Madsen, 2010; Schmedtmann and Campagnolo,
2015; Vorobiova, 2016; Leslie, Serbina and Miller,
2017)
There have been advancements in computer
science leading to the launch of high-resolution
sensors. Yet, it remains fundamental to study and use
a
https://orcid.org/0000-0003-4621-2917
b
https://orcid.org/0000-0002-6855-6270
Low-resolution satellite imagery that is being used
since more than 30 years. The higher resolution
offered by new sensors surely overcome the
limitations related to accuracy. However, the
continuity of the existing low-resolution systems data
is crucial. A work reported in (Rembold et al., 2013),
is an example that uses low-resolution Landsat
imagery for crop monitoring and yield forecasting,
expanding their operational systems. Furthermore,
time series investigation, for example change
detection, requires comparison with low resolution
images of the old databases (Canty and Nielsen, 2006;
Tian, Cui and Reinartz, 2014). In addition, analysing
high resolution satellite images requires more
processing time and higher cost (Fisher et al., 2018).
As discussed in (Fisher et al., 2018), the achieved
accuracy can be affected by some limiting factors
such as the variations in sensor angle and increase in
100
Sharifzadeh, S., Tata, J. and Tan, B.
Farm Detection based on Deep Convolutional Neural Nets and Semi-supervised Green Texture Detection using VIS-NIR Satellite Image.
DOI: 10.5220/0007954901000108
In Proceedings of the 8th International Conference on Data Science, Technology and Applications (DATA 2019), pages 100-108
ISBN: 978-989-758-377-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

shadows. Such factors challenge the precision of
spatial rectification. Then, considering the trade-off
between accuracy and cost, and depending on the
application, the value and need for higher-resolution
data must be analysed. Therefore, low resolution
satellite images such as Landsat are appropriate for
detection of large features such as farms (Leslie,
Serbina and Miller, 2017).
Reviewing the literature shows a vast amount of
research performed in land-cover classification. Early
works utilized pixel-based unsupervised and
supervised techniques such as Neural Networks
(NN), decision trees and nearest neighbours
(HARDIN. P.J, 1994; Hansen, Dubayah and Defries,
1996; Paola and Schowengerdt, 1997). Then, sub-
pixel, knowledge-based, object-based and other
hybrid classification techniques became prevalent.
Examples can be found (Foody and Cox, 1994;
Ryherd and Woodcock, 1996; Stuckens, Coppin and
Bauer, 2000). In many of those works software and
computational tools such as ERDAS and Khoros 2.2
were extensively utilized (Stuckens, Coppin and
Bauer, 2000). Recently, eCognition and ArcGIS
softwares have been utilized widely (Juniati and
Arrofiqoh, 2017; Fisher et al., 2018); A review of
some remote sensing classification studies can be
found in (Lu and Weng, 2007), where feature
extraction and, discrimination techniques for object
classification, such as urban areas and crops are
addressed.
One of the challenges of software-based strategies
is their low accuracy when applied on low resolution
images like Landsat 8 (Juniati and Arrofiqoh, 2017).
In such cases, appropriate choice of training samples,
segmentation parameters and modelling strategy is
important; for example, suitable segmentation scale
to avoid over and under segmentation is vital for
Object Based Image Analysis OBIA. Although there
are several reports of superior performance on
different landscapes, due to the segmentation scale
issue and lower resolution, OBIA is not very ideal for
Landsat data (Juniati and Arrofiqoh, 2017).
Another group of strategies utilise saliency maps for
pixel level classification of high-resolution satellite
images mainly. Examples are spectral domain
analysis such as Fourier and wavelet transforms for
creation of local and global saliency maps (Zhang and
Yang, 2014; Zhang et al., 2016) and combined low
level SIFT descriptors, middle-level features using
locality-constrained linear coding (LLC) and high
level features using deep Boltzmann machine (DBM)
(Junwei Han, Dingwen Zhang, Gong Cheng, Lei Guo,
2015).
In addition, the state of the art CNNs have been used
recently for classification of satellite images (Albert,
Kaur and Gonzalez, 2017; Fu et al., 2017;
Muhammad et al., 2018). Due to the limited
effectiveness of manual low-level feature extraction
methods in highly varying and complex images such
as diverse range of land coverage in satellite images,
deep feature learning strategies have be applied
recently for ground coverage detection problems. One
of the effective deep learning strategies is the deep
CNNs due to its bank of convolutional filters that
enables quantification of massive high-level spectral
and spatial features.
In this paper, the problem of farm detection using
low resolution satellite images is addressed. Two
main strategies are considered and compared.
The first strategy is based on the traditional
feature extraction and SVM classification techniques,
similar example works in different domains are (Jake
Bouvrie , Tony Ezzat, 2008; Sharifzadeh, Serrano and
Carrabina, 2012; Sharifzadeh et al., 2013). The
developed algorithm consists of an unsupervised
pixel-based segmentation of vegetation area using
NDMI, followed by a two-step supervised step for
texture area classification and farm detection; at the
first step GLCM and 2-D DCT features are used in an
SVM framework for texture classification and in the
second step, object-based morphological features
were extracted from the textured areas for farm
detection.
The second strategy utilises the deep high-level
features of pre-trained CNNs. The VGGNet16 is used
and the activation vectors are utilised for farm
detection problem using transfer learning strategy.
The rest of paper is organized as follows; section
2 is about data description. Section 3 describes the
both classification strategies. The experimental
results are presented in section 4 and we finally
conclude in section 5.
2 DATA DESCRIPTION
Landsat 8 is the latest earth imaging satellite of the
Landsat Program operated by the EROS Data Centre
of United States Geological Survey (USGS), in
collaboration with NASA. The spatial resolution of
the images is 30m. Landsat 8 captures more than 700
scenes per day. The instruments Operational Land
Imager (OLI) and Thermal Infrared Sensor (TIRS) in
Landsat 8 have improved Signal to Noise Ratio
(SNR) and quantization of data is 12-bit to allow
better land cover analysis. The products downloaded
are 16-bit images (55,000 grey levels) (Leslie,
Farm Detection based on Deep Convolutional Neural Nets and Semi-supervised Green Texture Detection using VIS-NIR Satellite Image
101
Serbina and Miller, 2017) (Landsat.usgs.gov.
Landsat 8 | Landsat Missions). There are 11 bands out
of which, we use all the visible and infrared (IR)
bands. The chosen area for analysis is near Tendales,
Ecuador (See Figure 4). In this work, different
combinations of band are used for calculating
vegetation and moisture indices used in estimation of
vegetation green areas as well as visible RGB bands
for classification analysis.
3 METHODOLOGY
In this section the two main used classification
methodologies are explained.
3.1 Feature Extraction-based Strategy
In this strategy, the vegetation area is segmented
using the Normalized Difference Moisture Index
(NDMI) image. Next, local patches are generated
automatically, from the segmented green area. Then,
textured areas including farms or any other pattern are
classified by applying SVM on the extracted features
using GLCM and 2-D DCT. Finally, the farm areas
are detected by morphological analysis of the textured
patches and SVM modelling. MATLAB 2018 was
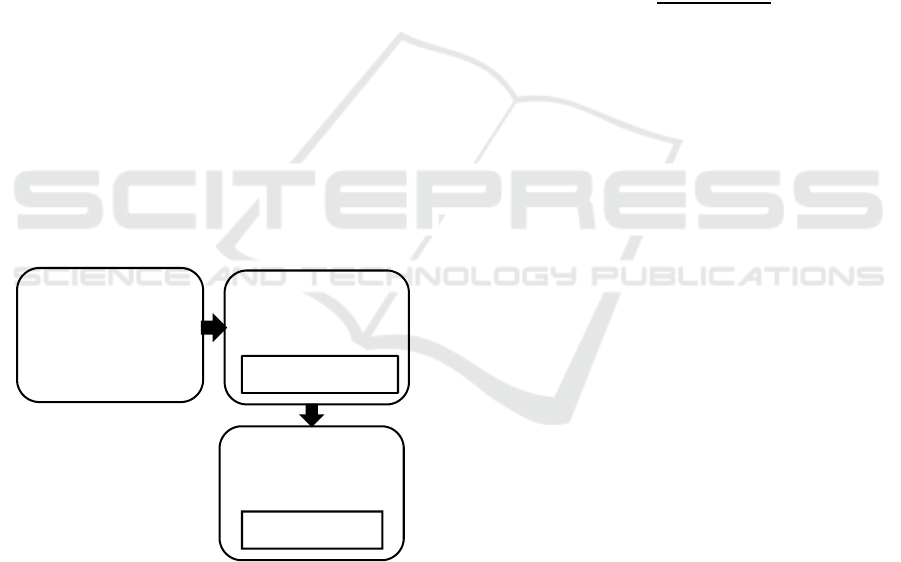
used for all implementations. Figure 1 shows the
block diagram of the analysis strategy.
Figure 1: Block diagram showing the overall process of the
first strategy.
3.1.1 Vegetation Segmentation
The pixels are segmented using spectral bands; the
Near Infra-Red (NIR) in 851-879 nm range and
Shortwave NIR (SWIR) in 1566-1651 nm range are
used. One of the common methods for vegetation
estimation is the Normalized Difference Vegetation
Index (NDVI) (Ali, 2009). However, NDMI (Ji et al.,
2011) can be a more suitable technique because it
considers the moisture content of the soil and plants
instead of the leaf chlorophyll content or leaf area.
There are also similar works like (Li et al., 2016),
which have used NDMI and tasselled cap
transformations on 30m resolution Landsat images
for estimating soil moisture. Hence, the farm areas
that went undetected by NDVI are well detected by
thresholded NDMI strategy.
NDMI uses two near-infrared bands (one channel of
1.24-µm that was never used previously for
vegetation indices) to identify the soil moisture
content. It is employed in forestry and agriculture
applications (Gao, 1996). This index has been used in
this paper for the estimation of total vegetation
including the agricultural lands and farms. For Lands
imagery, NDMI is calculated as:
NDMI
NIRSWIR
NIRSWIR
(1)
NDMI is always in the range [-1, +1]. It is reported
that NDMI values more than 0.10- 0.20 indicate very
wet or moist soil surfaces (Ji et al., 2011). Then, based
on this study, cultivable land is extracted for further
classification.
3.1.2 Texture Area Detection
The detected green areas from the previous step are
mapped on the RGB band images. Farm areas are part
of the green areas of the image; therefore, the detected
green areas are divided into small patches of 200
200 pixels. Then, feature extraction is performed for
each patch of image to detect the textured patches.
Patches with flat patterns do not include a farm area.
GLCM - One of the feature extraction techniques
employed for texture areas is the GLCM that is
widely used for texture analysis (Tuceryan, 1992).
The GLCM studies the spatial correlation of the pixel
grayscale and spatial relationship between the pixels
separated by some distance in the image. It looks for
regional consistency considering the extent and
direction of grey level variation. Considering the
characteristics of the flat regions and the textured
regions (non-farm or farm) as shown in Figure 5,
GLCM is used for discrimination. Mathematically,
the spatial relation of pixels in image matrix is
quantified by computing how often different
combinations of grey levels co-occur in the image or
a section of the image. For example, how often a pixel
with intensity or tone value occurs either
horizontally, vertically, or diagonally to another pixel
at distance with the value (see Figure 2-a).
Depending on the range of intensities in an image, a
GLCM-DCT- SVM
Green area
segmentation
(NDMI-Un sup.)
Step 1.
Tex. Vs. Flat
Feature Ext.
Step 2.
Tex. Vs. Farm
Feature Ext.
Morph. - SVM
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
102

number of scales are defined and a GLCM square
matrix of the same dimensional size is formed. Then,
image pixels are quantized based on the discrete
scales and the GLCM matrix is filled for each
direction. Figure 2-b shows the formation process of
a GLCM matrix based on horizontal occurrences at
1. The grayscales are between 1 to maximums 8
in this case.
Two order statistical parameters: Contrast,
Correlation, Energy and Homogeneity samples are
used to define texture features in the vegetation.
Considering a grey co-occurrence matrix , they are
defined as:
Contras
t
|
ij
|
pi,j
,
(2)
Correlation
i
μ
j
μ
pi,j
σ
σ
,
(3)
Energ
y
pi,j
,
(4)
Homogenit
y
pi,j
1
|
ij
|
,
(5)
where, ,denote row and column number,
,
,
,
are the means and standard deviations of
and
, so that,
∑
,
and
∑
,
. is the number of intensity scales, used
for GLCM matrix formation.
(a) (b)
Figure 2: (a) Illustration of forming GLCM matrices in four
directions i.e., 0
°
,45
°
,90
°
,135
°
. (b) Computation of
GLCM matrix based on horizontal occurrences at 1 for
an image (MATLAB, 2019).
Further detailed information can be found in
(Haralick, Dinstein and Shanmugam, 1973). The
GLCM features are calculated in directions 0°, 45°,
90°, and 135° as shown in Figure 2-a. The calculated
GLCM features in the four directions are averaged for
each parameter and used as input to the classification
model
GLCM
Cont
,Corr
,Eng
,Hom
, (see
Table 1).
2D DCT - DCT sorts the spatial frequency of an
image in ascending order and in the form of cosine
coefficients. Most significant coefficients lie in the
lower order, corresponding to the main components
of the image, while the higher order coefficients
correspond to high variation in images. Since the
variation in a textured patch is higher than a flat one,
the DCT map can help to distinguish them. For this
aim, the original image patch
is transformed into
DCT domain
and a hard threshold is applied to
the DCT coefficients to remove the high order
coefficients
. Then, the inverse 2D-DCT of
the thresholded image
is computed. In both
original and DCT domain, the reduction in the
entropy of the textured patches is more significant
than the flat areas representing smooth variations.
Therefore, the ratio of coefficients’ entropy before
and after thresholding
,
are
calculated in both domains. For textured patches the
entropy ratios are greater compared to flat patches
due to the significant drop in entropy after
thresholding the large amount of high frequency
information (See Figure 6).
3.1.3 Morphological Features
To recognize if a detected textured patch contains
farm areas, first the patch image is converted to
grayscale image. Then, the Sobel edge detection
followed by morphological opening and closing by
reconstruction are performed. This highlights the
farm areas, keeping the boundaries and shapes in the
image undisturbed. Next, the regional maxima were
found to extract only the areas of maximum intensity
(or the highlighted foreground regions). Further, the
small stray blobs, disconnected or isolated pixels, and
pixels having low contrast with the background in
their neighbourhood are discarded. This is because
there is a contrast between the farm regions (marked
as foreground) and their surrounding boundary pixels.
The same procedure is performed for a non-farm
sample. The area of the foreground as well as the
entropy for a patch including farm is higher compared
to a non-farm due to the higher number of connected
foreground pixels. Figure 7 shows the resulting
images of this analysis.
3.1.4 SVM Modelling
SVM classifiers are trained using the four GLCM and
the two DCT features at step 1 and morphological
features at step 2. The first model is capable to detect
textured versus the flat patches and the second one
detects the patches including farms from the textured
patches with no farm areas. The LibSVM (Chang and
Lin, 2011) is used. In this paper, the 5-fold cross-
validation (Hastie, Tibshirani and Friedman, 2009), is
used to find the optimum kernel and the
corresponding parameters. It helps to avoid over-
Pixel of interest
Farm Detection based on Deep Convolutional Neural Nets and Semi-supervised Green Texture Detection using VIS-NIR Satellite Image
103
fitting or under-fitting. The choice of kernel based on
cross validation allows classifying data sets with both
linear and non-linear behaviour. SVM was used for
remote-sensing and hyperspectral image data analysis
previously (Petropoulos, Kalaitzidis and Prasad
Vadrevu, 2012).
3.2 Transfer Learning Strategy for
VGGNet16
CNN is a popular classification method based on deep
learning different levels of both spectral and special
features using the stack of filter banks at several
convolutional layers. However, training a CNN
requires large data sets and heavy time-consuming
computations and is prone to over-fitting using small
data sets. A versatile approach in this case is transfer
learning; The high-level deep features learnt over
several layers of convolution, pooling and RELU
using million images of massive ranges of scenes and
objects are kept. That is based on the fact that the
weighted combination of these activation maps of
high-level features are the underlying building blocks
of different objects of the scenes. While, the end
layers called fully connected layers (FC) should be re-
trained using hundreds of new training images. These
layers are used to evaluate the strong correlation of
the previous layers high-level features to particular
classes of the task (in training images) and calculate
the appropriate weights giving high probabilities for
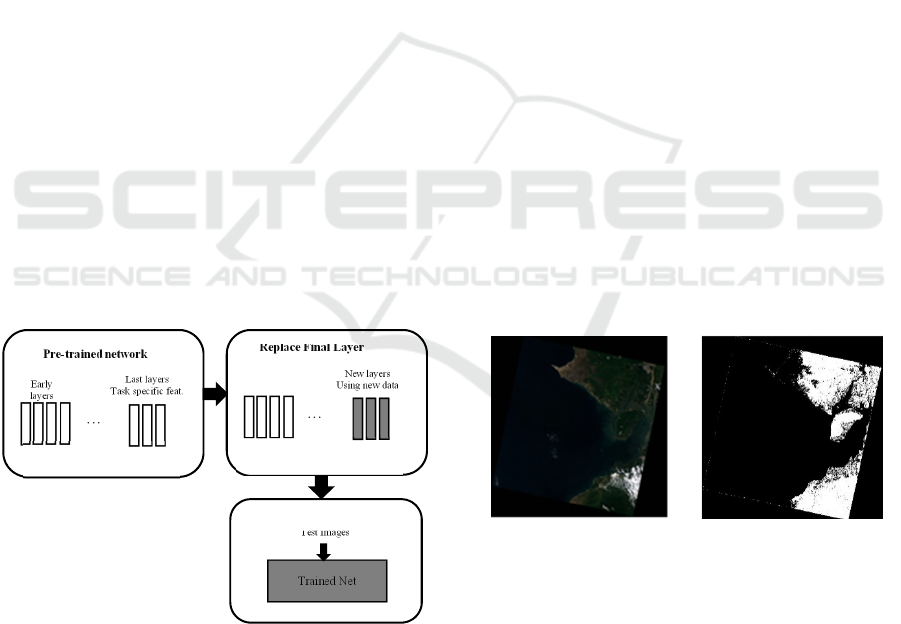
correct classifications. Figure 3 shows the transfer
learning concept.
Figure 3: Block diagram showing the transfer learning
strategy.
The recent works on utilisation of this technique
(Chaib
et al., 2017; Li et al., 2017) shows suitability
of transference of the learnt activation vectors for a
new image classification task. Therefore, new patches
of satellite images are used to retrain the final FC
layers of VGG-16 CNN.
3.2.1 VGG-16
VGG-16 network is trained on more than a million
images from the ImageNet database (Image Net,
2016). There are 16 deep layers and 1000 different
classes of objects, e.g. keyboard, mouse, pencil, and
many animals. This network has learned rich high-
level feature representing wide ranges of objects. The
size of input image is 2242243 where the three
colour layers are RGB bands. The last three FC layers
are trained for classification of 1000 classes. As
explained, these three layers are retrained using our
satellite image patches of the same size for farm
classification while all other layers are kept.
4 EXPERIMENTAL RESULTS
In this section the results obtained from both
strategies are presented and compared.
4.1 Feature Extraction Strategy
Results
As mentioned in section 2, the Landsat 8 satellite
images source is used. Figure 4-a shows the image
used in this work.
(a) (b)
Figure 4: (a) Landsat 8 RGB image of Tendales, Ecuador
(b) Result of thresholding using the NDMI.
Figure 4-b shows the result of vegetation green
area detection using NDMI. This image was further
utilised for making patches (from green areas) that are
used for the two-step classification framework.
Figure 5 shows three patches of flat, textured-farm
and textured non-farm areas.
New layers
Using new data
Replace Final Layer
…
Fewer classes (10s),
less data (100s)
Early
layers
Last layers
Task specific feat.
Pre-trained network
…
1000s classes,
Millions of images
Test Images
New trained net
Trained Net
Im
p
roved Net
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
104
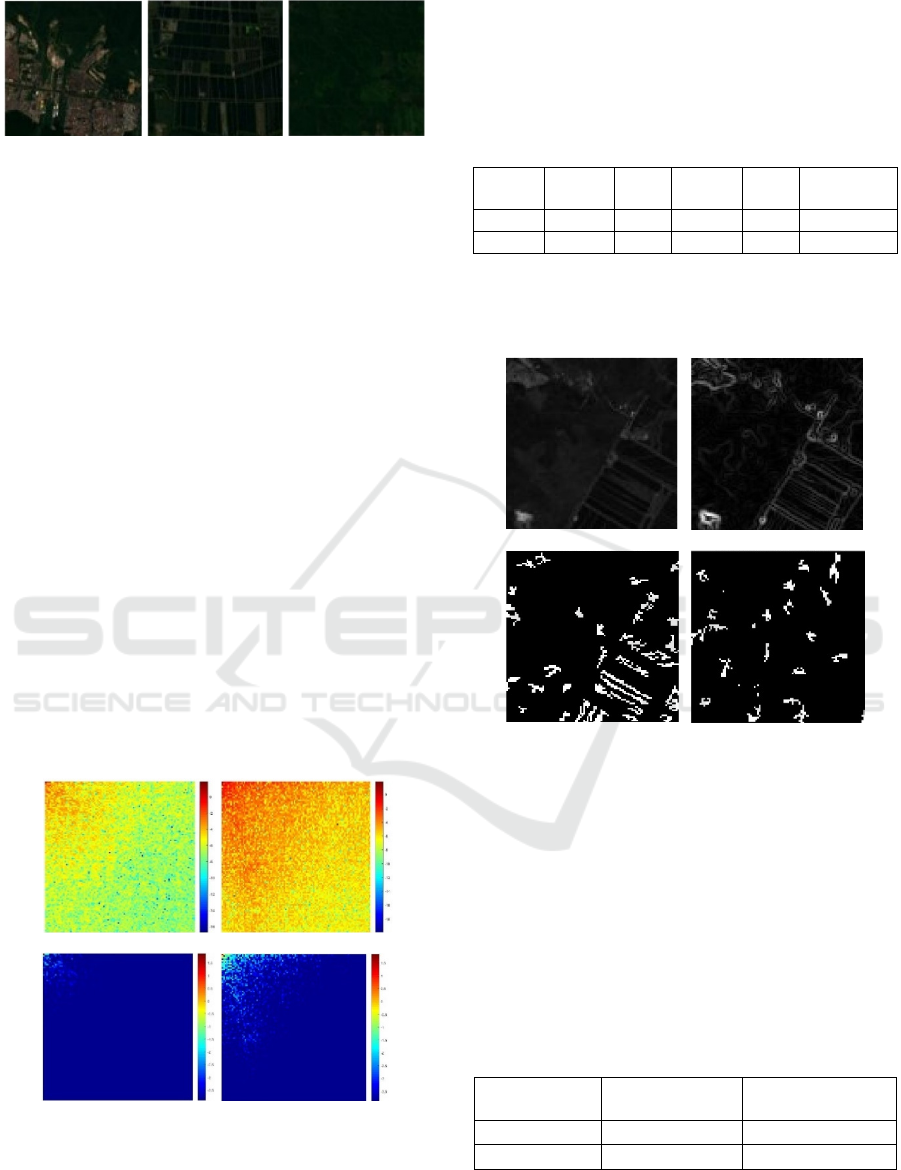
(a) (b) (c)
Figure 5: Examples of (a) Flat (b) Textured-Farm (c)
Textured Non-Farm patches.
In the experiments of both steps of feature
extraction and classification with SVM, the number
of training patches of both classes (textured verses
flat and farm verses non- farm) were almost balanced
to avoid discriminative hyperplanes found by SVM
be favoured toward the more populated class. Totally
from total patches, around 75% was used for training
and the rest were kept as unseen data for test. In the
first classification, 111 samples were used for training
and 15 samples for test. In the second classification,
there were 83 training samples and 22 test samples.
At the first step, the four GLCM features and two
DCT features were extracted from patches and
combined. Figure 6 visualises the 2D DCT maps of a
flat and textured patch before thresholding the higher
frequencies coefficients and after thresholding. As
can be seen, the textured patch has high energies in
both low frequencies as well as high frequencies,
while in the flat patch DCT map, only low
coefficients show high energy values. Therefore, the
thresholded DCT map of the textured patch shows
significant drop of energies in high frequencies. This
influences the entropy ratios.
(a) (b)
(c) (d)
Figure 6: DCT map before thresholding (a) flat patch, (b)
textured patch. After thresholding (c) flat patch (d) textured
patch.
Table 1 presents the average of the GLCM and
DCT features over 20 patches for textured and flat
classes.
Table 1: GLCM and one of the DCT features used for
classification of Flat and Textured Areas. (Values shown
are averaged over 20 samples).
Class Cont. Eng. Hom. Ent.
DCT Ent.
Ratio
Flat
0.0041 0.991 0.9979 3.014 0.1202
Tex.
0.067 0.847 0.9671 4.761 0.3337
All the classified textured patches from this step
were used to extract the morphology features at the
second step, as shown in Figure 7.
(a) (b)
(c) (d)
Figure 7: (a) Grayscale image of a farm patch (b) Result of
Sobel edge detection (c) Detected farm area by
morphological foreground detection (d) Detected area of a
textured non-farm patch shown in Figure 5-a.
The performance of classifiers is evaluated based
on the number of correctly classified samples. Results
are presented in Table 2. As can be seen, the first
texture classification step is very robust. However,
the performance is reduced for the second farm
classifier based on morphology features.
Table 2: Training and test accuracy of the two-step feature
extraction-based strategy for farm detection.
Classification
Step
Train Accuracy
(%)
Test Accuracy (%)
1 96.39 (107/111) 93.33 (14/15)
2 83.1325 (69/83) 81.8182 (18/22)
Farm Detection based on Deep Convolutional Neural Nets and Semi-supervised Green Texture Detection using VIS-NIR Satellite Image
105
4.2 Transfer Learning Strategy Results
In order to retrain the three FC layers of VGG-16 net,
hundreds of images are required. Then, further
number of patches were used compared to the first
strategy to fulfil the requirements of this modelling
strategy. Transfer learning was performed using three
different sets of more than 300 patches. The first set
includes image patches from any general area of the
satellite image, including ocean patches, mountains,
residential areas, green flat and textured areas and
farms. The last three FC layers of VGG-16 were
retrained for the two-class farm detection problem.
In the second set, the same number of patches
were used excluding the non-green areas based on
NDMI. This means the patches can include one of the
flat green area, green textured non-farm area or a farm
area.
Finally, in the third set of the same size, only
green textured non-farm patches as well as farm ones
were used.
In all three cases, 75% of patches were used for
training and the remaining was used as the test unseen
data. There were 72 farm patches and the rest were
non-farm in all three sets. Due to random selection,
the number of patches of each class are different in
the generated sets. The average and standard
deviation of the results over 5 randomly generated
train and test sets are reported in Table 3. As
expected, no significant difference can be seen
between the results of the three studies. That is, the
high-level features acquired from the stack of filter
banks include all those spectral, special, structural
and colour features extracted using the manual feature
extraction strategy. Due to inclusive level of features
extracted using the deep convolutional layers, the
CNN results outperform the two-step feature
extraction strategy.
Table 3: Average and standard deviation of the training and
test accuracy of the CNN using transfer learning on the
three different sets of patches.
Classification
type
Train Accuracy (%) Test Accuracy (%)
Farm vs. general
areas
99.550.64 96.762.26
Farm vs. green
areas
99.370.76 95.952.87
Farm vs. green
tex. area
98.910.52 96.76 2.80
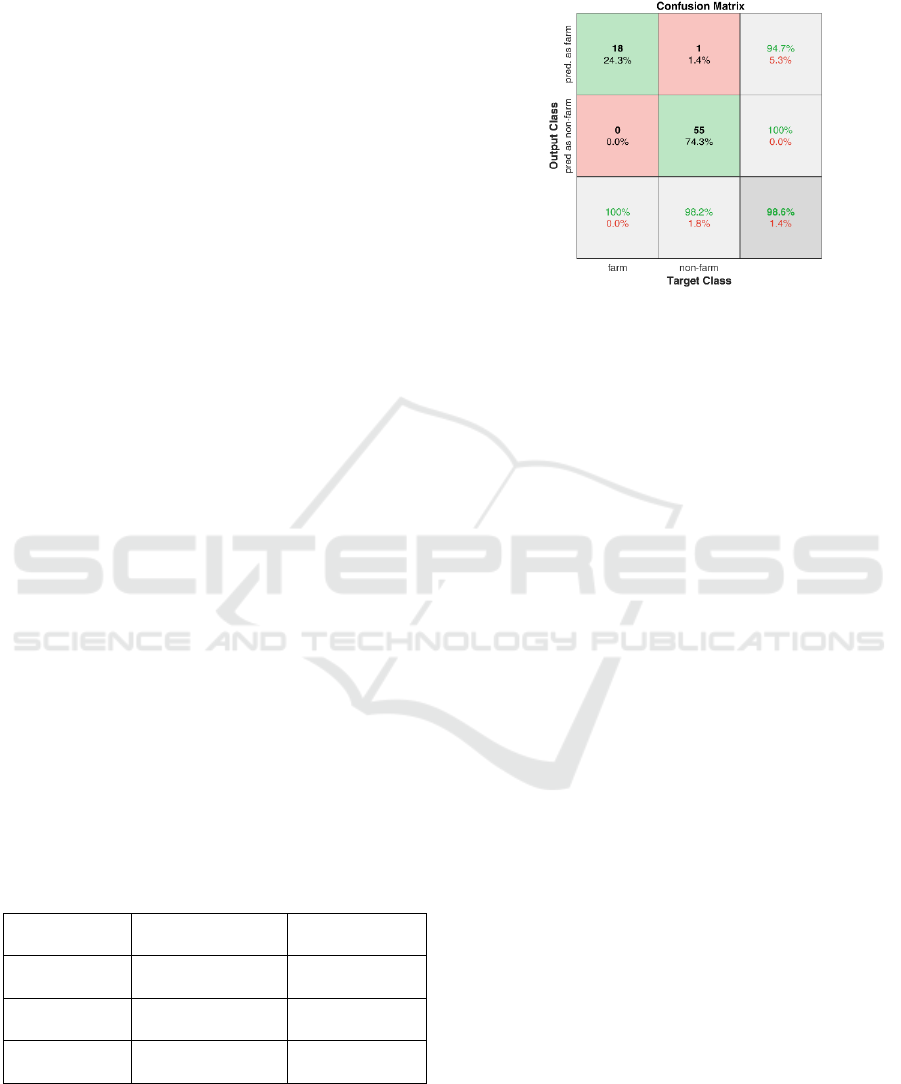
Figure 8, shows the confusion matrix of one of the
five test sets results using the transferred CNN
models. The first experiment data set, that classifies
farm patches from any general patch was used. As
shown, only one general non-farm patch was
misclassified as a farm patch.
Figure 8: The confusion matrix of one of the five test sets
results from the first data set (classification of farm patches
from any general patch).
5 CONCLUSIONS
This paper is focused on farm detection using low
resolution satellite images. Two main detection
strategies are considered; first a traditional feature
extraction and modelling strategy was developed. In
this method, unsupervised thresholding using
Normalized Difference Vegetation Index (NDVI)
was used for green area detection. Then, a two-step
algorithm was developed using Grey Level Co-
occurrence Matrix (GLCM), 2D Discrete Cosine
Transform (DCT) and morphological features as well
as Support Vector Machine (SVM) modelling to
detect the farms areas from textured areas. The
second strategy was based on deep high-level features
learnt from the pre-trained Visual Geometry Group
Network (VGG-16) networks. In order to use these
features for farm classification, transfer learning
strategies were employed. The experimental results
showed the superiority of the Convolutional Neural
Networks (CNN) models.
REFERENCES
Albert, A., Kaur, J. and Gonzalez, M. (2017) ‘Using
convolutional networks and satellite imagery to identify
patterns in urban environments at a large scale’.
Available at: http://arxiv.org/abs/1704.02965.
Ali, A. (2009) Comparison of Strengths and Weaknesses of
NDVI and Landscape-Ecological Mapping Techniques
for Developing an Integrated Land Use Mapping
Approach A case study of the Mekong delta , Vietnam
Comparison of Strengths and Weaknesses of NDVI and
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
106

Landscape-Ecolo, ITC. International Institute for Geo-
Information Science and Earth Observation.
Canty, M. J. and Nielsen, A. A. (2006) ‘Visualization and
unsupervised classification of changes in multispectral
satellite imagery’, International Journal of Remote
Sensing, 27(18), pp. 3961–3975.
Chaib, S. et al. (2017) ‘Deep Feature Fusion for VHR
Remote Sensing Scene Classification’, IEEE
Transactions on Geoscience and Remote Sensing.
IEEE, 55(8), pp. 4775–4784.
Chang, C. and Lin, C. (2011) ‘LIBSVM : A Library for
Support Vector Machines’, ACM Transactions on
Intelligent Systems and Technology (TIST), 2, pp. 1–39.
Fisher, J. R. B. et al. (2018) ‘Impact of satellite imagery
spatial resolution on land use classification accuracy
and modelled water quality’, Remote Sensing in
Ecology and Conservation, 4(2), pp. 137–149.
Foody, G. M. and Cox, D. P. (1994) ‘Sub-pixel land cover
composition estimation using a linear mixture model
and fuzzy membership functions’, International
Journal of Remote Sensing.
Fu, G. et al. (2017) ‘Classification for high resolution
remote sensing imagery using a fully convolutional
network’, Remote Sensing, 9(5), pp. 1–21. doi:
10.3390/rs9050498.
Gao, B. (1996) ‘NDWI—A normalized difference water
index for remote sensing of vegetation liquid water
from space’, Remote Sensing of Environment,
266(April), pp. 257–266.
Hansen, M., Dubayah, R. and Defries, R. (1996)
‘Classification trees: An alternative to traditional land
cover classifiers’, International Journal of Remote
Sensing.
Haralick, R. M., Dinstein, I. and Shanmugam, K. (1973)
‘Textural Features for Image Classification’, IEEE
Transactions on Systems, Man and Cybernetics.
Hardin. P. J (1994) ‘Parametric and nearest-neighbor
methods for hybrid classification’, a comparison of pixel
assignment accuracy. Photogramtnetric Engineering and
Remote Sensing. 60, 60(12), pp. 1439–1448.
Hastie, T., Tibshirani, R. and Friedman, J. (2009) The
elements of statistical learning. Second Edi. New York:
Springer.
Image Net (2016) Stanford Vision Lab, Stanford University,
Princeton University. Available at: http://www.image-
net.org/ (Accessed: 12 January 2019).
Jake Bouvrie , Tony Ezzat, and T. P. (2008) ‘Proceedings
of International Conference On Acoustics, Speech and
Signal Processing’, in Localized Spectro-Temporal
Cepstral Analysis of Speech, pp. 4733–4736.
Ji, L. et al. (2011) ‘On the terminology of the spectral
vegetation index (NIR-SWIR)/(NIR+SWIR)’, Interna-
tional Journal of Remote Sensing, 32(21), pp. 6901–
6909.
Juniati, E. and Arrofiqoh, E. N. (2017) ‘Comparison of
pixel-based and object-based classification using
parameters and non-parameters approach for the pattern
consistency of multi scale landcover’, in ISPRS
Archives. International Society for Photogrammetry
and Remote Sensing
, pp. 765–771.
Junwei Han, Dingwen Zhang, Gong Cheng, Lei Guo, and J.
R. (2015) ‘Object Detection in Optical Remote Sensing
Images Based on Weakly Supervised Learning and
High-Level Feature Learning’, IEEE Transactions on
Geoscience and Remote Sensing, 53(6), pp. 3325–3337.
Landsat.usgs.gov. Landsat 8 | Landsat Missions (no date)
https://earthexplorer.usgs.gov/. Available at:
https://landsat.usgs.gov (Accessed: 17 May 2018).
Leslie, C. R., Serbina, L. O. and Miller, H. M. (2017)
‘Landsat and Agriculture — Case Studies on the Uses
and Benefits of Landsat Imagery in Agricultural
Monitoring and Production: U.S. Geological Survey
Open-File Report’, p. 27.
Li, B. et al. (2016) ‘Estimating soil moisture with Landsat
data and its application in extracting the spatial
distribution of winter flooded paddies’, Remote
Sensing, 8(1).
Li, E. et al. (2017) ‘Integrating Multilayer Features of
Convolutional Neural Networks for Remote Sensing
Scene Classification’, IEEE Transactions on
Geoscience and Remote Sensing.
Lu, D. and Weng, Q. (2007) ‘A survey of image
classification methods and techniques for improving
classification performance’, International Journal of
Remote Sensing.
MATLAB (2019) Graycomatrix, R2019a.
Muhammad, U. et al. (2018) ‘Pre-trained VGGNet
Architecture for Remote-Sensing Image Scene
Classification’, Proceedings - International Conference
on Pattern Recognition. IEEE, 2018–Augus (August),
pp. 1622–1627.
Paola, J. D. and Schowengerdt, R. a (1997) ‘The Effect of
Neural-Network Structure on a Classification’,
Americal Society for Photogrammetry and Remote
Sensing, 63(5), pp. 535–544.
Petropoulos, G. P., Kalaitzidis, C. and Prasad Vadrevu, K.
(2012) ‘Support vector machines and object-based
classification for obtaining land-use/cover cartography
from Hyperion hyperspectral imagery’, Computers and
Geosciences. Elsevier, 41, pp. 99–107.
Rembold, F. et al. (2013) ‘Using low resolution satellite
imagery for yield prediction and yield anomaly
detection’, Remote Sensing, 5(4), pp. 1704–1733. doi:
10.3390/rs5041704.
Ryherd, S. and Woodcock, C. (1996) ‘Combining Spectral
and Texture Data in the Segmentation of Remotely
Sensed Images’, Photogrammetric engineering and
remote sensing.
Schmedtmann, J. and Campagnolo, M. L. (2015) ‘Reliable
crop identification with satellite imagery in the context
of Common Agriculture Policy subsidy control’,
Remote Sensing.
Sharifzadeh, S. et al. (2013) ‘DCT-based characterization
of milk products using diffuse reflectance images’, in
2013 18th International Conference on Digital Signal
Processing, DSP 2013.
Sharifzadeh, S., Serrano, J. and Carrabina, J. (2012)
‘Spectro-temporal analysis of speech for Spanish
phoneme recognition’, in 2012 19th International
Farm Detection based on Deep Convolutional Neural Nets and Semi-supervised Green Texture Detection using VIS-NIR Satellite Image
107

Conference on Systems, Signals and Image Processing,
IWSSIP 2012.
Stephanie Van Weyenberg, Iver Thysen, Carina Madsen, J.
V. (2010) ICT-AGRI Country Report, ICT-AGRI
Country Report. Reports on the organisation of research
programmes and research institutes in 15 European
countries. Available at: http://ict-agri.eu/sites/ict-
agri.eu/files/deliverables/ICT-Agri-country_report.pdf.
Stuckens, J., Coppin, P. R. and Bauer, M. E. (2000)
‘Integrating contextual information with per-pixel
classification for improved land cover classification’,
Remote Sensing of Environment.
Tian, J., Cui, S. and Reinartz, P. (2014) ‘Building change
detection based on satellite stereo imagery and digital
surface models’, IEEE Transactions on Geoscience and
Remote Sensing, 52(1), pp. 406–417.
Tuceryan, M. (1992) ‘Moment based texture
segmentation’, in Proceedings - International
Conference on Pattern Recognition. Institute of
Electrical and Electronics Engineers Inc., pp. 45–48.
Vorobiova, N. S. (2016) ‘Crops identification by using
satellite images and algorithm for calculating estimates’,
in CEUR Workshop Proceedings, pp. 419–427.
Zhang, L. et al. (2016) ‘Global and local saliency analysis
for the extraction of residential areas in high-spatial-
resolution remote sensing image’, IEEE Transactions
on Geoscience and Remote Sensing. IEEE, 54(7), pp.
3750–3763.
Zhang, L. and Yang, K. (2014) ‘Region-of-interest
extraction based on frequency domain analysis and
salient region detection for remote sensing image’,
IEEE Geoscience and Remote Sensing Letters, 11(5),
pp. 916–920.
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
108
