
The Efficient Distribution Method of Limited Wireless
Communication Frequency Resources for the Multi-robot Teaming
Heeseo Chae
a
, Jae Hyuk Ju
b
and Jae Hyun Park
c
Defense Robotic Systems Team, Hanwha Defense, Pangyo-Ro, Bundang-Gu, Korea
Keywords: Wireless Communication Frequency, Multi-robot Teaming, Resource Distribution Method.
Abstract: In the situation where various defense robot systems are developed and operated, wireless network is an
indispensable element to remotely control unmanned robots. However, when each defense robot is operated
on the basis of wireless communication, the available frequency resources per robot are limited. At this point,
if multiple robot operations are increased and the number of robots participating in them increased
exponentially, a serious shortage of available frequencies is expected. Therefore, we propose a dynamic
allocation of frequency resources as the bottom-up type approach to overcome this problem. More specifically,
we implemented a bandwidth allocation scheme according to the priority change of each end node. We also
show the validity and efficiency of this method through the related experimental results.
1 INTRODUCTION
When an unmanned robot is operated at a remote
control station in real field as a defense use, a wireless
communication environment should be established
basically irrespective of whether the robot is a ground
vehicle or an aerial vehicle. However, the available
bandwidth of the communication frequency is limited,
and the number of the robot for the military purpose
is steadily increasing (Alberts, David S., et al., 2000).
In such a situation, when a plurality of robots are
operated by a single control system or heterogeneous
robots are operated together, a serious shortage of
wireless network frequency is expected. Especially,
military frequency is strictly controlled due to
security problems in military operation environment
(Heeseo Chae, et al., 2017). The unmanned robot we
are developing currently needs to be allocated a
communication frequency from the government in
order to use it in the actual field. However, there are
many difficulties.
Because not only new unmanned
robots but also existing systems use similar
communication equipment, the available frequency
bands are similar. Thus, users should pre-check and
avoid the preferred communication frequency band.
Depending on the area, they have to be preoccupy the
a
https://orcid.org/0000-0001-7293-5807
b
https://orcid.org/0000-0001-7547-9931
c
https://orcid.org/0000-0001-9664-086X
available frequencies and use it selectively.
(Jae Hyuk
Ju, 2014). Therefore, multi-robot operation method
and frequency utilization approach are being
researched to overcome this limited environment (D.
Gesbert, et al., 2003).
In this paper, we describe a case where
heterogeneous robots operating in a limited wireless
communication environment are teaming through
multiple robot control methods. In order to use
allocated frequencies effectively, we will distribute
them in accordance with each mission and suggest a
way to reallocate the network channels in a bottom-
up manner. We also show the system design and the
software architecture that will enable such
mechanism, and explain the implementations. Finally,
we analyse the experimental results applied to the
actual multi-robots and confirm the feasibility and
expandability of our approach.
2 CONFIGURATRION OF THE
DEFENSE ROBOT
There are three types of defense robots that we
develop. Size and weight are the criteria, and as
530
Chae, H., Ju, J. and Park, J.
The Efficient Distribution Method of Limited Wireless Communication Frequency Resources for the Multi-robot Teaming.
DOI: 10.5220/0007971605300536
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 530-536
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
shown in Figure1, it is classified into large-class,
medium-class, and small-class unmanned robots.
Even if the types of robots are different, each network
device used for wireless communication has a
common functions. There is some performance
difference depending on the operating range of the
robot (Hyo Keun Lee, et al., 2017). In the actual field,
the robot is remotely operated using the legitimate
network frequency assigned by each military unit. In
order to do teaming among the robots of different
classes, it is necessary to separate the channel within
the provided communication frequency range,
allocate them to the respective robots, and operate
them appropriately (Heeseo Chae, et al., 2016).
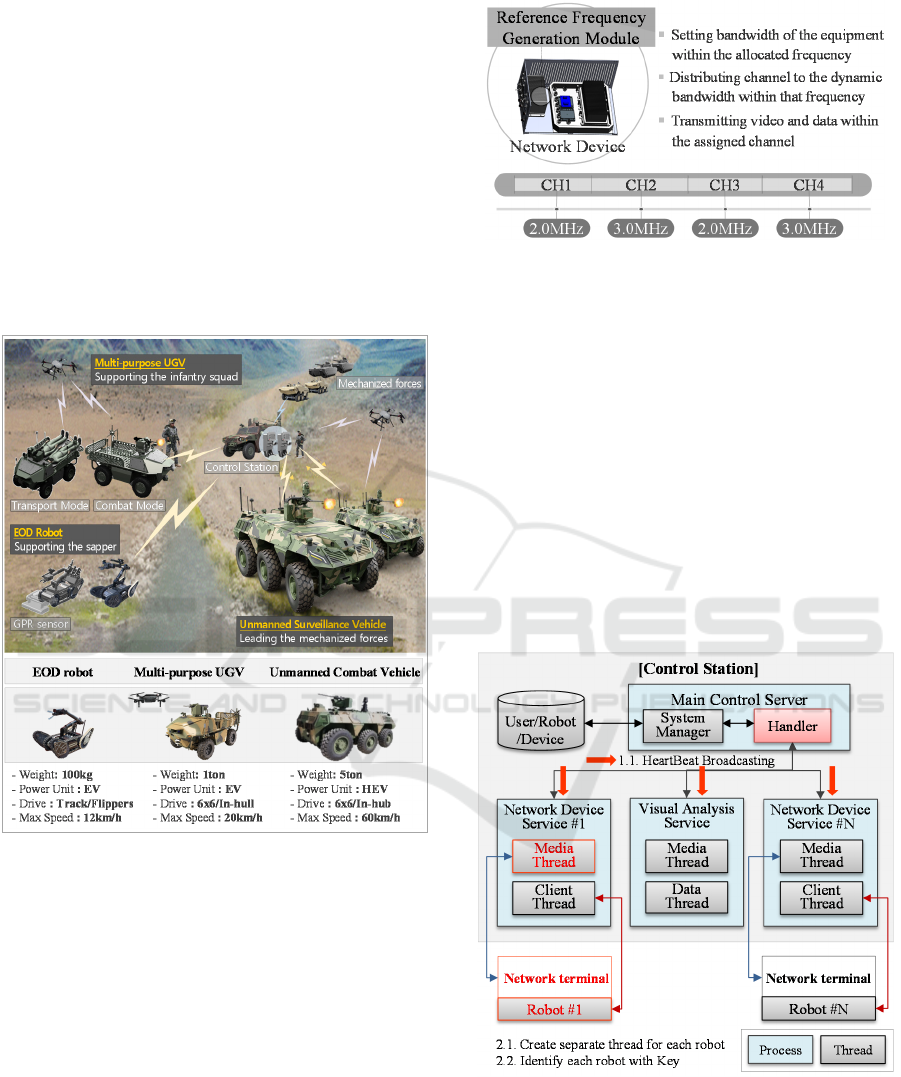
Figure 1: Multi-robot teaming concept and each robot spec.
The above figure shows the concept that each robot
operates remotely around the control station.
Although it operates in a top-down approach with in
the allocated frequency, it may also perform direct
communication between robots through the ad-hoc
network if necessary (Heeseo Chae, et al., 2018). In
addition, according to the driving ability and the role
of each robot, there is a difference in priority in using
network resources.
2.1 The Common Network Device Design
For multi-robot teaming, hardware and software of
communication devices should be provided as the
same common platform for each robot.
Figure 2: The Network device to set the dynamic
bandwidth.
In the past, when the frequency was allocated to each
device, the channel was distributed as the same
bandwidth (Albus, J. S. et al., 2006). This is a top-
down approach, and we use the dynamic bandwidth
configuration scheme shown in Figure 2 to improve
it. This method is the common design of the hardware
side, and in terms of software, the common communi-
cation architecture is required to implement it.
2.2 The Common Network Architecture
The runtime view of the network architecture, which
is mainly performed by the control station, is as
follows.
Figure 3: The Network architecture for server process.
The operator’s command are transmitted through the
process that is dedicated to each robot. Utilizing this
multi-thread structure, N robots for teaming can be
remotely controlled as long as communication
resources are provided. The heartbeat is periodically
The Efficient Distribution Method of Limited Wireless Communication Frequency Resources for the Multi-robot Teaming
531
transmitted to prevent the network disconnection
between the control station and the robot. In order to
cope with dynamic bandwidth change, it is possible
to continuously identify the robot that was being
controlled by using a key for each robot.
3 FREQUENCY DIFFERENTIAL
DISTRIBUTION SCHEME
If a large number of unmanned robots are operated
according to the conventional method within a limited
frequency, it is inevitable to provide insufficient
bandwidth to all robots. That is, the legacy approach
using the even distribution can only operate a limited
number of robots, and is unsuitable for operating
more than N robots. Therefore, the proposed
frequency operation method is dynamically
determined without setting the division ratio in
advance.
3.1 Resource Allocation by the Robot
Teaming Scale
The method of distributing the bandwidth according
to the scale of robot teaming is as follows.
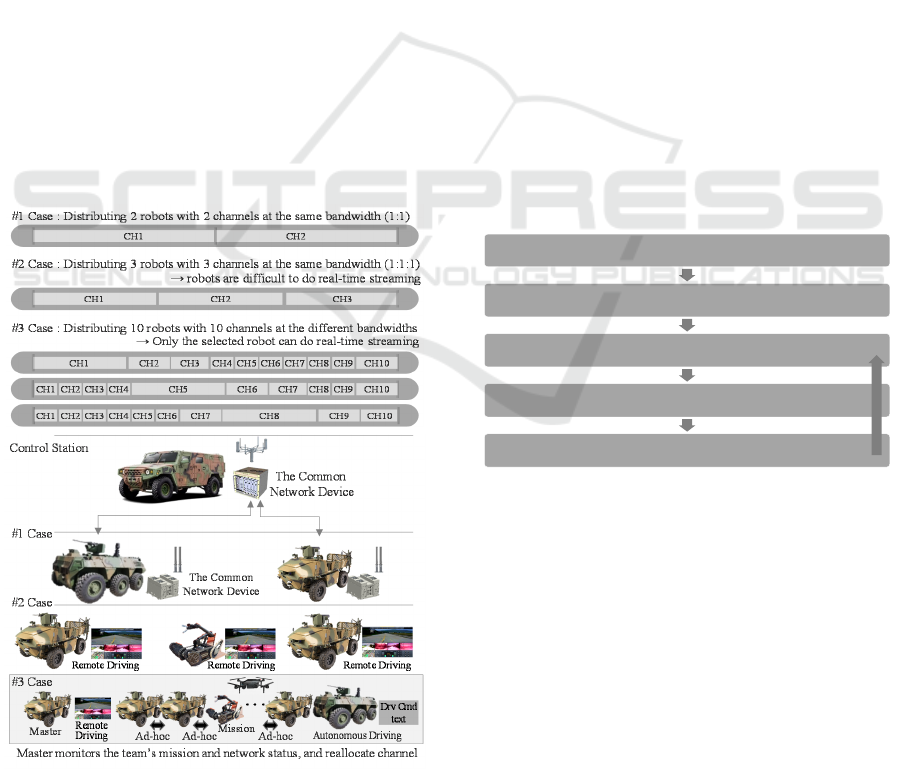
Figure 4: The channel allocation by the teaming scale.
In the figure 4, case#1 and case#2 are examples of
frequency allocation using even distribution. When
the number of robots is small, remote control is
possible through real time image. However, as the
number of robot increase, it becomes difficult to
provide real time image. In the case#3, the master of
the robot team monitors the current task and network
status of each member, and send a channel
reallocation request to the control station at a
predetermined time interval. It can accept this
bottom-up request and provide new bandwidth
dynamically. When sharing information among
robots within a robot team, some portion of the
existing frequency bands can be used. However, in
order to maximize available frequency range, the
separated network as ad-hoc type is utilized. This area
uses a temporary frequency domain because it is a
short distance communication that exchanges simple
data such as status information of each robot. In order
to prevent attenuation by distance, ad-hoc needs to
maintain the distance between robots.
3.2 Network Channel Reallocation
Process and Criteria
Reallocating the wireless network bandwidth as a
bottom-up approach requires a formal process and
standard.
Figure 5: The recursive process for bandwidth reallocation.
In the above figure, except for the initialization
process (stage1 and stage2), it shows the cycle of
continuous circulation according to a certain time
period. The factors considered in channel reallocation
are the priority of the task being executed and the
urgency of the situation. This information is provided
to nearby robots and the master. Based on the data,
the bandwidth allocation is determined.
The criteria of the channel reallocation process is
based on the task priority table. It is as follows.
Stage1. Checking the number of operating robots
Stage2. Allocating default channel bandwidth
Stage3. Using the provided frequency during a period
Stage4. Prioritizing robot based on Mission & Situation
Stage5. Reallocating channel bandwidth
Stage6. Recursive call
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
532
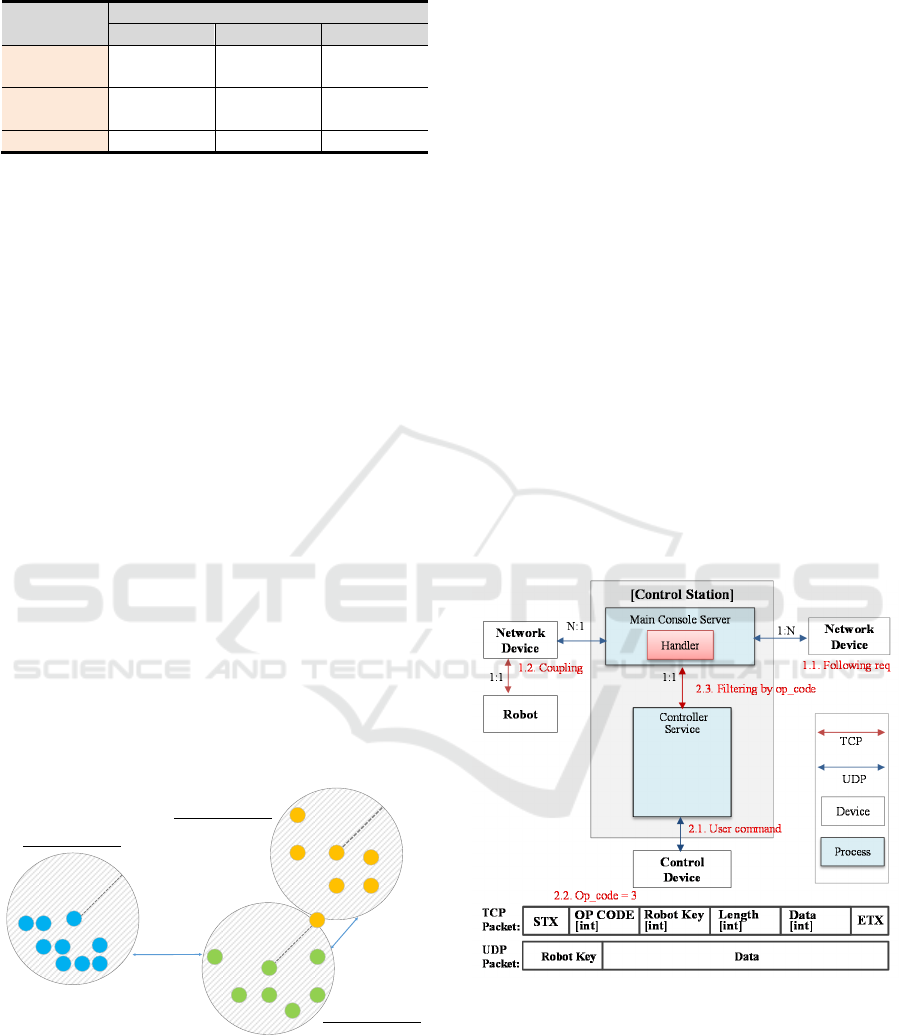
Table 1: Task Priority Matrix from the Operation Concept.
Driving
Status
Task for Mission
Surveillance firing No mission
Remote
Driving
2 1 3
Autonomous
Driving
5 4 6
Stop 8 7 9
The missions of robots are simplified as surveillance,
shooting, and moving. The highest priority is
shooting. This is because the target must be captured
with real-time video and fire commands should be
delivered without delay. In case of driving, remote
driving and autonomous driving are classified. The
remote driving requires a large amount of
communication bandwidth because it needs real-time
video streaming. Disconnection of network during the
driving cab lead to accidents. On the other hand,
autonomous driving requires relatively fewer videos,
so it can be operated with a small traffic volume
(DeSouza, Guilherme N., et al., 2002). Through a
combination of mission and driving, the situation of
firing during remote driving requires the most
resources. Conversely, if it does nothing and stops, it
has the lowest priority. In this case, the network
bandwidth is reduced dynamically.
3.3 Frequency Reuse Considering
Interference
If a multi-robot team is operated by the proposed
method, interference of the network frequency can be
predicted considering the operation range of each
team. It is shown in the figure below.
Figure 6: Frequency Reuse Situation based on the distance.
Because there is no interference between Robot
Team#1 and Robot Team#2, frequency reuse is
possible. The communication radius between the
robot and the control station is 5km, which is beyond
the supportable range of the network device. There is
no problem to use the same frequency in different
teams. However, when an operation is performed at a
close distance, such as the Robot Team#2 and the
Robot Team#3, some robots can be overlapped. In
this case, frequency interference occurs and noise is
generated. To overcome this situation, we set a
unique OP-Code for communication network of each
team and set a robot key for individual end node. The
OP-Code can be generated by the Random Number
Generator with AES256 standard (Keller, Sharon S,
2005). Because of this function, even if the
communication is interrupted, unauthorized control
of the robot is impossible. This concept can be
achieved through a network process design that is
adaptable to dynamic bandwidth changes and a
packet structure with security considerations.
3.4 Packet Structure for Dynamic
Channel Change
The above-referred security-enhanced packet
structure can be seen in Figure 7 as a runtime view.
Especially, the design focused on the function of the
main console server of the control station enables to
cope with the changes of the robot’s mission and
driving status.
Figure 7: Dynamic bandwidth process and packet structure.
The network structure is implemented to prevent the
robot from being lost due to operator’s miss-control,
network disconnection, and frequency interference.
The robot and each manipulation device are not
directly connected, but data is exchanged through the
server. Also, the authority of a massage packet is
changed according to whether the current driving
state of the robot is remote driving or autonomous
5km
No Frequency
Interference
5km
Robot Team#1
5km
Frequency
Interference
Robot Team#3
Robot Team#2
The Efficient Distribution Method of Limited Wireless Communication Frequency Resources for the Multi-robot Teaming
533
driving. With this design, the authority and the
security can be maintained when allocating dynamic
bandwidth. Such a mechanism can provide a wireless
communication environment in which reliability and
security are considered.
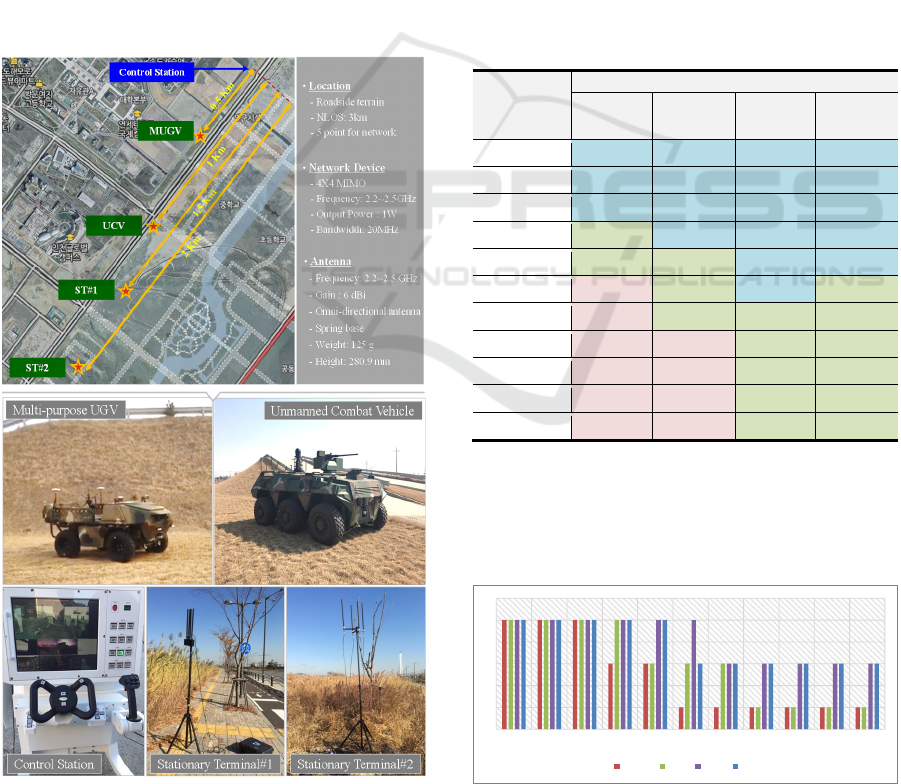
4 EXPERIMENT
In order to verify the proposed frequency distribution
scheme, the following comparative experiments were
conducted. One control station and four network
devices are selected, and a total of five network
devices are utilized.
4.1 Experimental Conditions
For the convenience of experiment, we used network
devices of two mobile robots and three stationary
terminals.
Figure 8: Experimental equipment and conditions.
The experimental site used the terrain with the road
side and the ground side. The network device has the
1W output and 4x4 MIMO type antennas. Also, the
frequency is 2.2~2.5GHz and the bandwidth is
basically 20MHz.
In the first experiment, we measured the transmission
performance by distance through the static channel
distribution. The second experiment, which we
suggested, we confirmed how efficiently the
transmission performance can be improved through
the dynamic channel distribution.
4.2 Result of Static Channel Distribution
When the control station was set as the origin, the
bandwidth was distributed to the same 5MHz for each
channel of each node. We measured the signal
sensitivity (SNR: Signal to Noise Ratio) by increasing
the distance of the nodes.
Table 2: Signal Sensitivity of Static Channel Distribution.
Distance
Node’s bandwidth
MUGV
[5MHz]
UCV
[5MHz]
ST#1
[5MHz]
ST#2
[5MHz]
0m 52dB 58dB 69dB 65dB
500m 35dB 42dB 50dB 44dB
1000m 30dB 35dB 42dB 34dB
1500m 22dB 34dB 39dB 34dB
2000m 20dB 30dB 32dB 33dB
2500m 17dB 24dB 32dB 26dB
3000m 15dB 20dB 23dB 20dB
3500m 8dB 11dB 26dB 21dB
4000m 11dB 18dB 23dB 21dB
4500m 15dB 17dB 28dB 21dB
5000m 11dB 12dB 29dB 21dB
When the signal sensitivity is 30dB or more, 5MHz
can be used as a full condition. Between 20dB and
30dB, 3Mbps can be used. Less than 20dB can be
used below 1Mbps, so it is difficult to transmit video
in real-time. It can be expressed as follows.
Figure 9: Throughput of Static Channel Distribution.
0
1
2
3
4
5
6
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
MUGV UCV ST#1 ST#2
(m)
(Mbps)
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
534
There is some performance difference between anten-
nas, but communication sensitivity is further reduced
in the case of moving robots. It limits the distance
remotely controllable. The stationary terminals do not
need to move, so the network sensitivity does not need
to be good. However, since they exhibit better signal
sensitivity, waste of resources occurs.
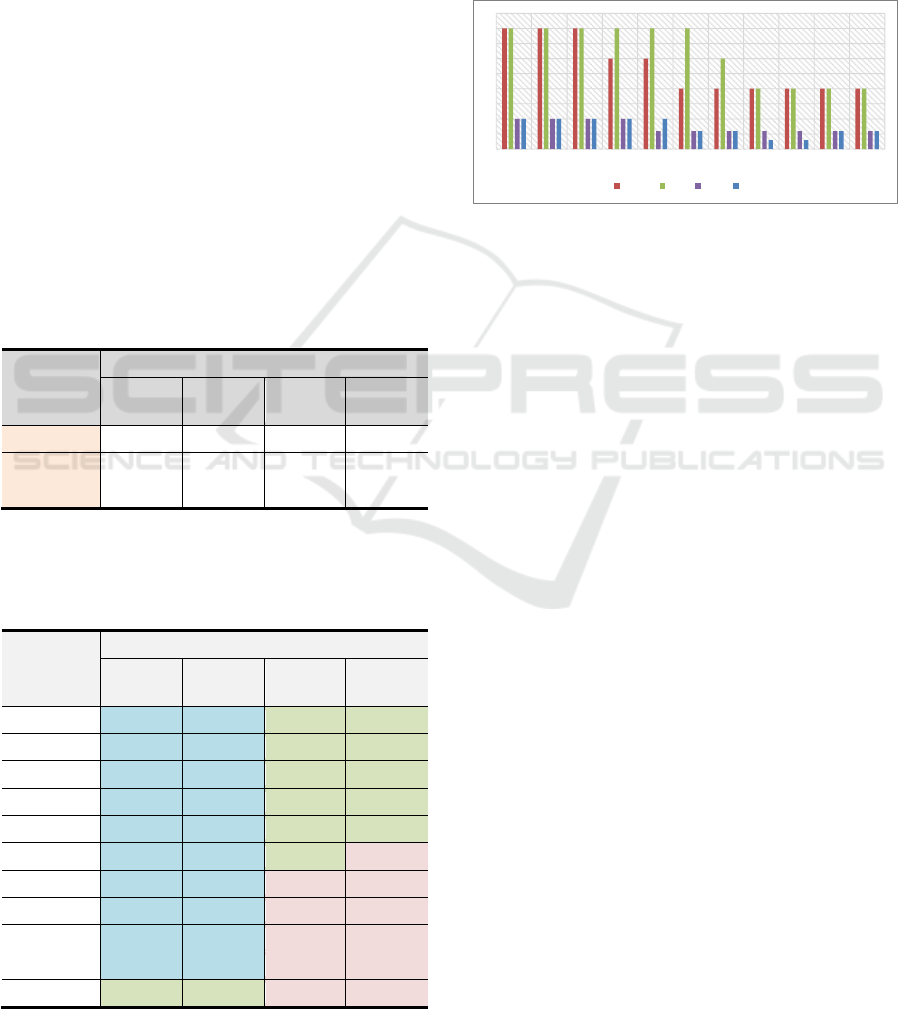
4.3 Result of Dynamic Channel
Distribution
The bandwidth of each node is differently distributed.
By increasing the priority of the mobile robots, more
bandwidth was allocated to MUGV (Multi-purpose
UGV) and UCV (Unmanned Combat Vehicle) by
8MHz, respectively. Likewise, we measured the
signal sensitivity by increasing the distance from the
origin (Control Station). Unlike the first experiment,
if the SNR is over 30dB in 8MHz node, 8Mbps can
be used. If the SNR is less than 20dB in 8MHz node,
still it can use 4Mbps. However, a node that has been
allocated a 2MHz bandwidth can only use 2Mbps at
30dB. The table shows the following.
Table 3: Throughput table by SNR and Bandwidth.
SNR
Node
MUGV
[8MHz]
UCV
[8MHz]
ST#1
[2MHz]
ST#2
[2MHz]
30dB~ 8Mbps 8Mbps 2Mbps 2Mbps
20~30dB 6Mbps 6Mbps 1.2Mbps 1.2Mbps
~20dB 4Mbps 4Mbps 0.5Mbps 0.6Mbps
The available range of communication derived from
the above table is as follows.
Table 4: Signal Sensitivity of Dynamic Channel Distribution.
Distance
Node’s bandwidth
MUGV
[8MHz]
UCV
[8MHz]
ST#1
[2MHz]
ST#2
[2MHz]
0m 52dB 58dB 67dB 62dB
500m 33dB 41dB 52dB 45dB
1000m 31dB 36dB 43dB 33dB
1500m 22dB 35dB 37dB 31dB
2000m 21dB 32dB 28dB 30dB
2500m 18dB 33dB 29dB 24dB
3000m 16dB 23dB 23dB 20dB
3500m 11dB 12dB 25dB 19dB
4000m 10dB 13dB 24dB 19dB
4500m 15dB 15dB 28dB 21dB
5000m 11dB 13dB 27dB 21dB
The sensitivity of the signal along the distance is
similar to the first experiment. However, even though
the SNR of the mobile robot decrease according to the
distance, it can be confirmed that the throughput at
the long distance is more than 4Mbps because the
allocated resources are large. On the other hand, the
stationary terminal does not have a small SNR, but
the allocated bandwidth is so small that the
throughput is not enough to transmit videos even at
close distance. It is shown in the graph below.
Figure 10: Throughput of Dynamic Channel Distribution.
5 CONCLUSIONS
Since a large number of defense robots are expected
to be operated in the near future, the method for
efficiently using a limited network frequency has
suggested. The communication bandwidth was
reallocated on the basis of the mission and the driving
situation of the robots. As a result, we overcome the
shortage of network resource as much as possible. We
also proposed a network architecture and a packet
structure that can be applied irrespective of frequency
interference. The mechanism was verified by two
comparative experiments such as the static and the
dynamic channel distribution. If you use the dynamic
channel distribution to provide a significant amount
of resources to robots that require them, it is
experimentally confirmed that it is possible to
communicate smoothly even at a distance of about
two to three times as compared with the existing one.
In the future, more robots will be operated to
confirm the scalability of the proposed method. We
will also complete a mathematical model that takes
into account various optimization parameters such as
climate, terrain, jamming, increasing hop, and
moving speed of the robot. Through this, it is expect
to improve the reliability of the proposed method by
testing multi-robots with more than four nodes in the
virtual environment that could not be performed in
the field experiment.
0
1
2
3
4
5
6
7
8
9
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
MUGV UCV ST#1 ST#2
(m)
(Mbps)
The Efficient Distribution Method of Limited Wireless Communication Frequency Resources for the Multi-robot Teaming
535

ACKNOWLEDGEMENTS
This research was carried out with the support of the
civilian military applied research by Hanwha
Defense.
REFERENCES
Alberts, David S., et al. " Network Centric Warfare:
Developing and Leveraging Information Superiority”,
Assistant Secretary of Defense (C3I/Command Control
Research Program) Washington DC, 2000.
Heeseo Chae, et al. "The Reliable Design by the Wireless
Network Redundancy for Remote Control Mechanism
of the Heavy Unmanned Ground Vehicle", AIM2017,
IEEE, 2017.
Jae Hyuk Ju, " Automatic Traffic Control for Robot”, KR
Patent 2014-86157, 2014.
D. Gesbert, et al. "From theory to practice: an Overview of
MIMO space-time coded wireless systems”, IEEE
Journal on Selected Areas in Communications, vol. 21,
no. 3, pp. 281-302, 2003.
Hyo Keun Lee, et al, “A Trend Analysis and Technology
Application of Defense Technology Protection”,
Journal of Kimst, vol.20, Issue 4, p579-586, 2017.
Heeseo Chae, et al. “The comparison of the detecting
Performance between the ground and the aerial visual
analytics in the UGV-UAV collaborative system”, IEEE
conference (AIM), 2016
Heeseo Chae, et al. "The Anti-tampering process and case
study by the operating mode of various unmanned
ground vehicle”, AIM 2018, IEEE, 2018.
Albus, J.S. et al. " Learning in a Hierarchical Control
System: 4D/RCS in the DARPA LAGR Program”,
ICINCO 06, 2006.
DeSouza, Guilherme N., et al. " Vision for mobile robot
navigation: A survey”, IEEE transactions on pattern
analysis and machine intelligence 24.2, 2002.
Keller, Sharon S. “NIST-recommended random number
generator based on ANSI X9. 31 appendix A. 2.4 using
the 3-key triple DES and AES algorithms”, NIST
Information Technology Laboratory-Computer
Security Division, National Institute of Standards and
Technology, 2005.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
536
