
QCOF: New RPL Extension for QoS and Congestion-Aware in Low
Power and Lossy Network
Yousra Ben Aissa
1,2,3,4 a
, Hanen Grichi
5
, Mohamed Khalgui
1 b
, Anis Koubaa
6,7
and Abdelmalik Bachir
4 c
1
School of Intelligence Science and Engineering, Jinan University (Zhuhai Campus), Zhuhai 519070, China
2
National Institute of Applied Sciences and Technology (INSAT), University of Carthage, Tunisia
3
Information Faculty of Mathematical Physical and Natural Sciences, University of Tunis El Manar, Tunis, Tunisia
4
Computer Science Department, University of Biskra, Algeria
5
LISI Laboratory, Tunisia Polytechnic School, INSAT Institute, University of Carthage, Tunis, Tunisia
6
Prince Sultan University, Saudi Arabia
7
CISTER/INESC TEC and ISEP-IPP, Porto, Portugal
Keywords:
RPL Objective Function, DODAG Construction, Low Power and Lossy Network (LLN), Congestion-aware,
New DODAG Request Messages (NDR and NDR-Ack).
Abstract:
Low power and lossy networks (LLNs) require a routing protocol under real-time and energy constraints,
congestion aware and packet priority. Thus, Routing Protocol for Low power and lossy network (RPL) is
recommended by Internet Engineering Task force (IETF) for LLN applications. In RPL, nodes select their
optimal paths towards their preferred parents after meeting routing metrics that are injected in the objective
function (OF). However, RPL did not impose any routing metric and left it open for implementation. In
this paper, we propose a new RPL objective function which is based on the quality of service (QoS) and
congestion-aware. In the case paths fail, we define new RPL control messages for enriching the network
by adding more routing nodes. Extensive simulations show that QCOF achieves significant improvement in
comparison with the existing objective functions, and appropriately satisfies real-time applications under QoS
and network congestion.
1 INTRODUCTION
The evolution of Internet of Things (IoT) leads to
a great revolution in network communication. In
IoT, a large number of devices, objects, and com-
puters are interconnected using various connecting
technologies, that are provided in IoT’s link layer
with the IEEE 802.15.4, which is standardized for the
low power and lossy networks (LLNs) (Al-Turjman,
2017). The routing in LLNs has become one of the
most challenging issues, which is found in the net-
work with limited energy resources, processing, and
bandwidth such as wireless sensor networks (WSNs)
(Kumar et al., 2018)(Naidji et al., 2018). WSNs be-
come more and more attractive by their integration
in a real world of interconnected objects through in-
a
https://orcid.org/0000-0001-9237-8083
b
https://orcid.org/0000-0001-6311-3588
c
https://orcid.org/0000-0001-5160-9412
ternet (Zeinab and Elmustafa, 2017)(Hafidi. et al.,
2019)(Hafidi et al., 2018). The performance of WSNs
is affected by limiting processing and memory, limit-
ing energy, losing packet, delay, and real-time data
(Talebi et al., 2018). The limited energy associ-
ated with WSNs is a major bottleneck of WSN tech-
nologies. Therefore, we need a specific protocol for
LLN’s like RPL (Routing protocol for LLNs), which
is standardized by IETF (Internet Engineering Task
Force) in 2011 (Khallef et al., 2017)(Lakhdhar et al.,
2018)(Gu et al., 2018).
RPL is capable of effective building routes, broad-
casting routing information with a little overhead, and
providing small response time, because routes are
readily available (Gaddour and Koub
ˆ
aa, 2012)(Khal-
gui and Thramboulidis, 2008). Nowadays, RPL be-
came the standard routing protocol for the majority of
IoT applications based on LLN’s, where, many com-
panies adopted it as their underlying technology like
ZigBee Alliance (Gaddour et al., 2015)(Khalgui et al.,
560
Ben Aissa, Y., Grichi, H., Khalgui, M., Koubaa, A. and Bachir, A.
QCOF: New RPL Extension for QoS and Congestion-Aware in Low Power and Lossy Network.
DOI: 10.5220/0007978805600569
In Proceedings of the 14th International Conference on Software Technologies (ICSOFT 2019), pages 560-569
ISBN: 978-989-758-379-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2008). Nevertheless, RPL is still under development
and several issues remain open for improvement, in
particular, respect the quality of service (QoS), avoid
congestion, and energy consumption.
Despite the huge number of the proposed proto-
cols in literature, real-time communication (Khalgui
et al., 2005), energy consumption (Ghribi et al., 2018)
and congestion control remain one of the research
challenges in LLNs (Khalgui et al., 2007)(Ramdani.
et al., 2019)(Ramdani et al., 2018), where, i) real-
time communication is subjected to packet loss, in-
terference, unreliable data, missing deadline, par-
ticularly, for environmental monitoring applications
that require reliable network performance and pro-
vide data timely and reliably (Wang et al., 2018)(Qin
et al., 2012)(Khalgui et al., 2019), ii) energy con-
sumption depends on many operations like commu-
nication, processing, etc, which increases when these
operations increase, such in IoT the most of devices
are battery operated, thus the energy consumption
will be the network dominator (Wang et al., 2018),
and iii) congestion occurs when the traffic load ex-
ceeds the available link capacity, buffet node capacity,
contiguous or cascading failures, or the need of multi-
hop forwarding (Al-Kashoash et al., 2017). These
circumstances lead to increase packet loss ratio, in-
crease latency, increase delay, low throughput, waste
energy, increase retransmissions, and affect network
reliability (Karoui et al., 2017)(Khalgui et al., 2007).
To overcome these major limitations, we need to put
these circumstances as criteria for network communi-
cation.
In this paper, we are interested in improving the
QoS and avoiding congestion in LLNs such as WSNs.
In RPL, the objective function is responsible of find-
ing routing paths, which allows to select the best route
according to predefined criteria. This route is selected
after meeting link metrics that are recommended to be
used in LLNs. However, in RPL the objective func-
tion OF0 is based on one metric which is rank (node
positions). In spite of the existing RPL extensions,
RPL is still open in research and needs more improve-
ment (that we discuss in Section 2), which motivates
us to design a new RPL extension to overcome the ex-
isting RPL extension limitations. Therefore, we pro-
pose a new RPL extension that supports multiple rout-
ing nodes (multiple DODAGS), by modifying RPL’s
objective function (OF) and add other options to avoid
congestion, like time-feasibility, energy-feasibility,
link quality/capacity, input/output data, packet prior-
ity. The proposed QoS and Congestion-Aware Objec-
tive Function (QCOF) allows RPL to avoid conges-
tion after maintaining network feasibility in time and
energy. such QCOF is implemented by using linear
programming with the objective to maximize packet
transmission rate according to their priority, while us-
ing the minimal DODAG roots (routing nodes) (we
discuss this idea in Section 4.2). In the case where
all paths fail, we propose new RPL control messages
NDR and NDR-Ack (see Sec. 4.2.1) to add a new
DODAG while maintaining network feasibility.
The main originality in this paper are summarized
as follows:
• Delivering packets according to theirs priorities,
• Using link capacity/quality and total input/output
to detect, alleviate and avoid congestion,
• Guaranteeing network feasibility in time and en-
ergy,
• Using multiple DODAGs whenever and wherever
they are needed,
• Using new RPL control message structure.
The rest of paper is organized as follows: Sec-
tion 2 presents an overview about the routing proto-
col RPL. Section 3 summarizes related works. Sec-
tion 4 provides a formal model and description for
the proposed objective function. Section 5 evaluates
the performance of the proposed solutions with a case
study. Finally Section 6 provides concluding remarks
and directions for a future work.
2 RPL OVERVIEW
RPL is a proactive routing protocol for LLNs as de-
fined in RFC6550 (Request for Comments) (Shelby
et al., 2012), based on distance vectors and operate on
IEEE 802.15.4 (Molisch et al., 2004), which is stan-
dardized for constrained and IP-based environment,
such as 6LoWPAN networks (IPv6 Low power Wire-
less Personal Area Networks), and it is known as the
standard routing protocol for IoT based LLNs such as
WSNs (Gaddour and Koub
ˆ
aa, 2012). In RPL, the net-
work topology organized as DAG (Directed Acyclic
Graph), which is similar to the tree, while in DAG
nodes can associate to multiple parents not like tree.
Specifically, nodes are organized as DODAGs (Des-
tination Oriented DAGs) (Winter et al., 2012), where
RPL assigned for each node in the network a rank,
which represents the individual position of that node
(Ghaleb et al., 2018). In fact, it increases monoton-
ically while moving away from the root nodes (sink
nodes or DODAG root) towards the leaf nodes, then
inversely decreases from root nodes to leaf nodes.
Whilst, data is transmitted upward to root nodes or
downward to leaf nodes (Thubert, 2012).
The forwarding network topology built by RPL
QCOF: New RPL Extension for QoS and Congestion-Aware in Low Power and Lossy Network
561

called DODAG, where each node identifies a set of
available parents on a path towards the DODAG root
(sink node), then selects one of them as the preferred
parent based on the objective function. Thereafter, if
a link between a node and its selected parent fails,
then it switches to another parent from its available
parents set. The objective function defines how RPL
nodes would choose their preferred parents according
to one or more metrics. However, the OF0 of RPL
based only on one metric which is a rank (Thubert,
2012).
RPL offers a set of control messages that help
nodes to choose their preferred parents, where nodes
announce their ranks by sending a control messages
called DODAG information object (DIO). After re-
ceiving DIOs, they start establishing their path to-
wards their parent (DODAG root). Thereafter, they
update their rank by rank sum of their preferred par-
ents and the cost to reach them, to update their infor-
mation throughout the DAG, nodes send DAO mes-
sage (object of update to the destination). To get in-
formation about the network, nodes can send DIS (in-
formation request DODAG) messages for discovering
existing networks (Ghaleb et al., 2018).
3 RELATED WORK
Most of research have been carried out improving
RPL’s objective function by adding several metrics.
However, RPL’s specification did not impose any
routing metric and left it open for research.
The default RPL’s objective function (OF0) is pro-
posed as the first one in (Thubert, 2012). In OF0, the
node always chooses the preferred parent according
to the minimum rank. OF0 is a simple function which
does not consider any routing metric. After OF0, the
work reported in (Gnawali and Levis, 2012) proposes
a new objective function called the minimum rank
with hysteresis objective function (MRHOF), which
works on adding metrics along the route. However,
these two objective functions did meet all LLN’s ap-
plication requirements. The work reported in (Kim
et al., 2017a) modifies RPL implementation to sup-
port diverse traffic patterns, termed DT-RPL, which
updates link quality by using both upward and down-
ward traffic. However, this work is based only on
link quality which is not sufficient to satisfy LLN’s
application requirements. And in (Wang and Chal-
houb, 2019), the authors proposes an enhancement
mechanism for RPL based on a combination of mul-
tiple sinks support, RSSI, Rank and dynamic control
message management. Despite, it uses more metrics
which sill not sufficient to meet neither real-time
LLN’s application requirements nor packet priority.
Also, the work reported in (Wang et al., 2016) pro-
poses a network life cycle index LCI to improve the
original RPL. The index takes various factors into
consideration, for instance, link quality, node energy,
energy consumption rate, throughput and data rate. In
(Lamaazi and Benamar, 2017), the authors proposes
a new objective function based on fuzzy logic called
OF-EC, which considers expected transmission count
(ETX), hop count and energy consumption. How-
ever, these two works do not guarantee any respect
for real-time constraint or packet priority. In (Gad-
dour et al., 2014), the authors design a new objective
function based on fuzzy logic, which is called OF-
FL. This function combines four routing metrics to
provide a routing decision toward parents. However,
these works do not consider neither packet priority
nor congestion.
The following research works deal with
congestion-aware to improve RPL’s objective
function, where the work in (Al-Kashoash et al.,
2016) proposes a new RPL’s objective function called
Congestion-Aware Objective Function (CA-OF),
which uses buffer occupancy to minimize lost pack-
ets due to congestion. The work in (Kim et al., 2017b)
studies the load balancing and congestion problem
of RPL. It attempts to improve the end-to-end packet
delivery performance by balancing the traffic load
within a routing tree. The work in (Lodhi et al., 2015)
proposes a multi-path RPL’s extension (MRPL)
which aims to provide temporary multiple routing
paths during congestion over a path. However, these
research works still not sufficient to meet real-time
LLN’s application requirements.
In the above-mentioned researches, the objective
function based on one, two, or three metrics combi-
nation, which is not sufficient to satisfy all real-time
LLN’s application requirements, also, using two or
three metrics may improve DAG performance accord-
ing to the chosen metrics, but may lead to degrada-
tion according to other ones. Thus, in this paper we
propose a new RPL’s extension which addresses the
limitation of the related works, by using new met-
rics combination and improve DODAG construction
according to satisfy the real-time LLN’s application
requirements.
4 QCOF: QoS AND
CONGESTION-AWARE
OBJECTIVE FUNCTION
We propose a new objective function for RPL, which
chooses the optimal feasible path to forward data from
ICSOFT 2019 - 14th International Conference on Software Technologies
562

the source node to the root node (DODAG root). Ac-
cording to RPL, each node needs to select a preferred
parent from its neighborhood (next-hop) based on the
objective function. Thus, in the proposed QoS and
Congestion-Aware Objective Function QCOF (see
Sec. 4.2), the optimal feasible path is chosen after
verifying the following constraints: 1) meets real-
time constraints (time-feasibility); 2) meets energy
constraints (energy-feasibility); 3) respects link ca-
pacity and total input/output data (congestion-aware);
4) sends data according to their priority. In the case
where all paths fail, RPL attempts to add a new
DODAG root by using a new control message types
NDR and NDR-Ack (see Sec. 4.2.1).
4.1 Notations
This section formalises node characteristics and rout-
ing metrics used to design QCOF. Let N be the set
of sensor nodes, and n
i
be a sensor node from N ,
which has M
j
s
a set of new periodic messages to send
through channel j over a link, and M O
j
s
(resp. M
j
r
) a
set of old periodic messages that are transmitted (resp.
receive) through channel j. In fact, a sensor node has
a set of channels C over one link.
• Definition 1: A link (i,k) exists between two
nodes n
i
and n
k
, or n
k
is the neighbor of n
k
, if
n
k
is the communication range of n
i
(R
i
). Let N
i
be the set of neighbor nodes of n
i
, which is given
by
N
i
= {(i, k)/dist
i,k
≤ R
i
,i,k ∈ N } (1)
where, dist
i,k
is the distance between nodes n
i
and
n
k
.
• Definition 2: Node n
i
can forward its data to node
n
k
if
Fn
i,k
={k ∈ N
i
/dist
k,sink
< dist
i,sink
& Rank(n
k
) < Rank(n
i
)} (2)
• Definition 3: As defined in (Aissa et al., 2019) and
(Aissa et al., 2018), Real-time data can be sent
over channel j if and only if
– Channel utilization (U
j
) is less than 1, i.e.,
U
j
=
|M
j
s
|
∑
i=1
WCT T
i, j
T
i
≤ 1 (3)
– Consumed energy by this channel (E
j
) is less
than available energy, i.e.,
|C |
∑
j=1
E
j
([t
1
,t
2
]) < C
B
(t
1
) + E
H
([t
1
,t
2
]) (4)
where WCT T
i, j
is worst case transmission time
of message i over channel j, E
j
([t
1
,t
2
]) is con-
sumed energy by channel j in time interval
[t
1
,t
2
]. C
B
(t
1
) is remained energy in battery at
t
1
, and E
H
([t
1
,t
2
]) is harvested energy which
is collected from a photovoltaic (PV) power
source P
PV
(t) at particular time t. The har-
vested energy in time interval [t
1
,t
2
] is given by
E
H
([t
1
,t
2
]) =
Z
t
2
t=t
1
P
PV
(t)dt (5)
• Definition 4:A link between nodes n
i
and n
k
may
have congestion in the future, if
– the sum of received/transmitted (input/output)
messages is bigger than the predefined thresh-
old (exp. threshold= 0.8), i.e.,
∀c
j
∈ C :
LU
i,k
=
|M
j
r
|
∑
k=1
WCRT
k, j
T
k
+
|M
j
s
+M O
j
s
|
∑
i=1
WCT T
i, j
T
i
> Threshold (6)
– the set of received messages is bigger than the
set of transmitted messages, i.e.,
∀c
j
∈ C :
|M
j
r
|
∑
k=1
WCRT
k, j
T
k
>
|M
j
s
+M O
j
s
|
∑
i=1
WCT T
i, j
T
i
(7)
where WCRT
k, j
(res. WCT T
i, j
) is worst case
reception time of message k from node n
k
(res.
transmission time of message i from node n
i
)
over channel j, and T
k
(res. T
i
) refers to the
period of message k (res. message i).
• Definition 5: Let us suppose that the priority of a
packet varies between 1 to 10. Thus, node n
i
has
higher priority (P
i
) than node n
k
, if and only if
P
i
> P
k
, where P
i
and P
k
∈ [1 − 10] (8)
4.2 Objective Function
In this paper, we propose a new RPL’s objective
function which is based on Quality of Service and
Congestion-aware QCOF. QCOF uses the combina-
tion of routing metrics and constraints to choose the
feasible path, i.e., the rank (node position) (as defined
in (Thubert, 2012)), real-time constraints, energy con-
straints, packet priority, congestion metrics. In RPL,
each node uses the objective function to choose its
preferred parent, which is used to transfer data to-
wards the DODAG root. Thus, each node uses QCOF
to establish its path to the DODAG root.
QCOF: New RPL Extension for QoS and Congestion-Aware in Low Power and Lossy Network
563

QCOF is implemented by using linear program-
ming, where the objective function is to maximize
packet transmission rate according to their priority
(Eq. 9.0), which is subjected to five constraints, given
by: i) for each channel between node n
i
and its parent
n
j
; the channel’s utilization over their link Fn
i, j
must
not exceed the predefined threshold (Eq. 9.1), ii) for
each node; its output data (transmitting data) must be
higher than the input data (receiving data) (Eq. 9.2),
iii) for each channel; its consumed energy must not
exceed the available energy for a node (Eq. 9.3), vi)
for each data; its coefficient’s value must be between
one and zero, for identifying if the data will be sent
or not (Eq. 9.4), v) for each data; its coefficient’s sum
α
i, j
must equal to 1, for guaranteeing that the trans-
mission will not be duplicated (Eq. 9.5).
Maximize
|C |
∑
j=1
|M
j
s
|
∑
i=1
α
i, j
P
i
(9.0)
Subject to ∀n
j
∈ Fn
i, j
,∀c
j
∈ C :
|M
j
s
|
∑
i=1
α
i, j
WCT T
i, j
T
i
+
|M O
j
s
|
∑
i=1
WCT T
i, j
T
i
+
|M
j
r
|
∑
k=1
WCRT
k, j
T
k
+ ≤ T hreshold
(9.1)
|M
j
r
|
∑
k=1
WCRT
k, j
T
k
≤
|M
j
s
|
∑
i=1
α
i, j
WCT T
i, j
T
i
+
|M O
j
s
|
∑
i=1
WCT T
i, j
T
i
(9.2)
|C |
∑
j=1
E
j
([t
1
,t
2
]) < C
B
(t
1
) + E
H
([t
1
,t
2
])
(9.3)
∀m
i
∈ M
s
, 0 ≤ α
i, j
≤ 1 (9.4)
∀m
i
∈ M
s
,
|C |
∑
j=1
α
i, j
= 1 (9.5)
(9)
4.2.1 DODAG Construction
RPL’s objective function is defined to construct the
DODAG, but in case unsatisfying constraints, the OF
cannot construct the DODAG, i.e., the data trans-
mission will not respect the objective function’s con-
strains, which can lead to disaster. In WSN root nodes
are high cost and energy that offered with a limited
number. Thus, we suggest to manage DODAG root’s
locations. Therefore, initially the WSN has only one
DODAG root, then it starts adding more DODAG
roots one by one, whenever and wherever they are
needed based on QCOF. Hence, RPL attempts to
place multiple DODAGs in the highly loaded areas
according to QCOF constraints. Whereas, the process
of enriching the network by adding more DODAG
roots based on RPL’s control messages. For con-
structing DODAG RPL has four control message’s
types: 1) DODAG Information Object (DIO) used to
create path from upward routing, 2) Destination Ad-
vertisement Object(DAO) used to create path from
downward routing, also to propagate destination in-
formation to the upward nodes, 3) DODAG Infor-
mation Solicitation (DIS) used to solicit or request
a DIO from the RPL node, also to search neighbor-
hood, 4) Destination Advertisement Object Acknowl-
edgment (DAO-ACK) is response to unicast DAO
message. However, these control messages cannot
use in this process (enriching the network), thus, we
define new RPL’s control messages which is a New
DODAG Request message (NDR) and New DODAG
Acknowledgment message (NDR-Ack). NDR mes-
sage requests to assign a new DODAG root to a node,
and NDR-Ack message is the response to the multi-
cast NDR message. NDR (resp. NDR-Ack) structure
is based on DODAG Repair Request (resp. Reply)
(DRQ , resp. DRP) message’s structure (see (Guo
et al., 2013)), the structure of NDR and NDR-Ack
message is shown in Fig. 1 and Fig. 2) respectively.
RPLInstanceID VersionNumber
NDR_Rank
NDR_Sequence
Reserved
DODAG_ ID
(128 bit)
NDR_ID
(128 bit)
Option(s) . . .
0 7 15 3123
Flags
Figure 1: NDR message structure.
RPLInstanceID VersionNumber
NDR_Rank
NDR-Ack_Rank NDR_Sequence
Reserved
DODAG_ ID
(128 bit)
NDR_ID
(128 bit)
Option(s) . . .
0 7 15 3123
Figure 2: NDR-Ack message structure.
ICSOFT 2019 - 14th International Conference on Software Technologies
564

Where,
• RPLInstanceID: is unsigned field used to indicate
the part of RPL instance in the DODAG, as de-
scribed in (Winter et al., 2012).
• Version Number: is unsigned integer to indicate
DODAG version’s number as described in (Winter
et al., 2012).
• NDR Rank: is unsigned integer with 16-bit used
to indicate the rank (position) of the node gener-
ating the NDR message.
• NDR-Ack Rank: is unsigned integer with 16-bit
to indicate the rank (position) of the DODAG root
sending the NDR-Ack message.
• NDR Sequence: is a field with 8-bit to indicate
the sequence number of NDR message at the node
generating the NDR message.
• Flags: is unused field with 8-bit, which is reserved
for flags. The field MUST be initialized to zero
by sender and MUST be ignored by receiver as
defined in (Winter et al., 2012).
• Reserved: is unused field, which MUST be ini-
tialized to zero by sender and MUST be ignored
by receiver as defined in (Winter et al., 2012).
• DODAG ID: is a field with 128-bit, which identi-
fies the DODAG root. It must be a routable IPv6
address belonging to the DODAG root as defined
in (Winter et al., 2012).
• NDR ID: is an IPv6 address (128-bit) of the node
generating NDR message.
A node which could not satisfies QCOF con-
straints broadcasts a NDR message to the no-assigned
DODAG roots. Then, a DODAG root which is near to
the sender node replies by NDR-Ack message. If the
node received NDR-Ack, then it adds the address of
the DODAG root to its preferred parent list, and starts
transmitting data through this DODAG root (See Fig.
3). This process stays usable while there is available
DODAG root.
5 SIMULATIONS
In order to evaluate the impact of the proposed RPL’s
objective function QCOF on QoS and congestion, we
consider a DAG which contains up to one hundred
nodes, that are spread randomly in order to form a
connected network. These nodes have to send five
hundred new random packets to the DODAG root.
To show how QCOF can provide good performance
with respect real-time application requirements, we
compare QCOF with the objective function OF0 and
Broadcast NDR message
Node
DODAG
Roots
NDR-Ack with DODAG-ID
Add the new
DODAG Root
as preferred
parent
Send data to the new DODAG Root
Figure 3: DODAG construction.
MRHOF, that are simulated in Contiki
1
, which is an
open source operating system for the IoT. Then, we
measure five performance metrics while ensuring that
the network is time-feasible and energy-feasible. For
modeling and solving the optimization problem de-
fined in QCOF, we use CPLEX tool
2
.
5.1 Performance Metrics
• Packet Delivery Ratio: is the ratio of packets
successfully received by the destinations to the to-
tal sent by the sources, which can be defined as
following
PDR =
Data
R
Data
S
(10)
Where, Data
R
is the total successfully received
packets, and Data
S
is the total sent packets.
• Priority Packet Delivery Ratio: is the ratio of
packets delivery according to their priorities to the
total priorities.
• Throughput: is the total delivered packets over
the total simulation time.
• Average Energy Consumption: is the total con-
sumed energy by each packet over the total sent
and received packets.
5.2 Simulation Results
Packet Delivery Ratio. Figure 4 shows the packet
delivery ratio after varying the network size. As
1
http://www.contiki-os.org/
2
https://www.ibm.com/analytics/cplex-optimizer
QCOF: New RPL Extension for QoS and Congestion-Aware in Low Power and Lossy Network
565
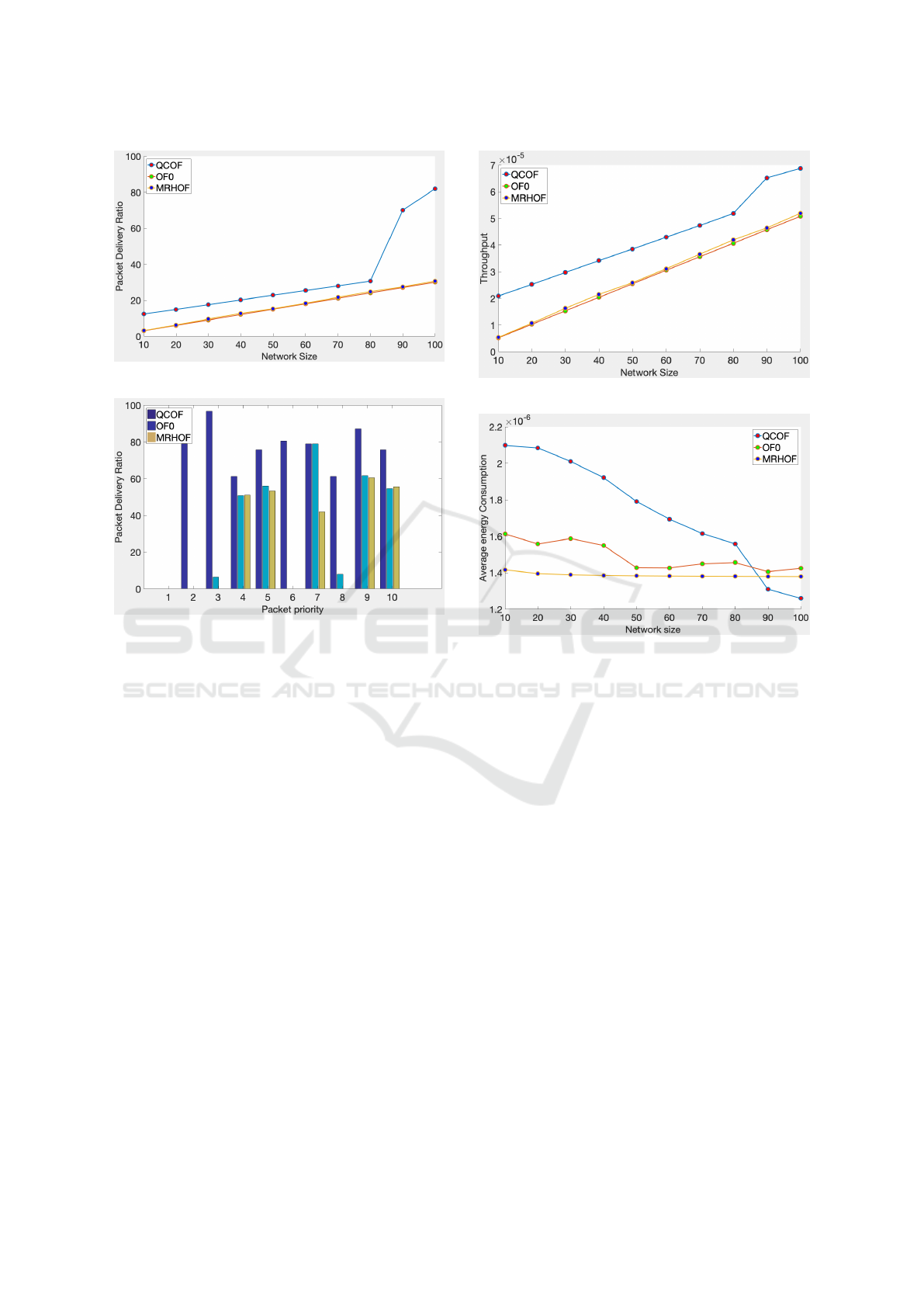
Figure 4: Packet delivery ratio versus packet priorities.
Figure 5: Packet delivery ratio versus network size.
shown in this figure and based on our simulation
statistics, the proposed objective function QCOF al-
ways provides the highest packets delivery ratios
compared to the related works OF0 and MRHOF,
where it goes up 80% when the network size goes to
100 nodes. Whereas OF0 and MRHOF provide ap-
proximately same ratio.
Priority Packet Delivery Ratio. Figure 5 shows
the packet delivery ratio according to their priorities,
where a set of periodic packets is coming with the
same WCTT and random period. Packet priorities is
between 1 and 10, and packets are delivered sequen-
tially according to their arrival time. As shown in this
figure and based on our simulation statistics, the pro-
posed objective function QCOF always provides the
highest ratios compared to the related works OF0 and
MRHOF, that is because QCOF provides the highest
packet delivery ratios.
Throughput. Figure 6 shows the throughput com-
putation after varying the network size. As shown
in this figure and based on our simulation statis-
tics, QCOF always produces the highest throughput
compared with the existing related work OF0 and
MRHOF, also, we noticed that the throughput is di-
Figure 6: Throughput versus network size.
Figure 7: Average energy consumption versus network size.
rectly proportional to the packet delivery ratio, which
represents the quality of network connection, where
when the throughput is increased, the network con-
nection’s quality becomes better and better.
Average Energy Consumption. To evaluate the ef-
fect of the proposed RPL’s objective function QCOF
on the consumed energy, we run an extensive simu-
lation and measure the average energy consumption
of each objective functions, where we use energy har-
vesting and PowerControl as defined in (Aissa et al.,
2019). Then we plot the obtained results in Fig. 7. As
shown in this figure, QCOF achieves the highest av-
erage when the number of sensor node is less than 90
nodes, whereas, it provides the lowest one as much as
network size increases, such that packet delivery ratio
increases as much as sensor nodes number increases.
While the average provided by OF0 is not continuous
decreases/increases to be the highest one when net-
work size passed over 90 nodes, that is due to packet
loss. MRHOF provides the lowest average which did
not affect by network size, i.e., the provided packet
delivery ratio is strict whatever network size increases
or decreases.
ICSOFT 2019 - 14th International Conference on Software Technologies
566

Figure 8: DODAG root numbers versus network size and
packet delivery ratio.
DODAG Roots Number. Figure 8 shows the vari-
ation of using DODAG roots versus network size
and packet delivery ratio. As shown in this figure,
DODAG root number is proportional to the packet
delivery ratio, where based on our simulation statis-
tics, for high packet delivery ratio, the network adds
more DODAG roots to meet the real-time applica-
tion requirements. Additionally and according to our
simulation statistics, DODAG roots number does not
have directed proportional relation to network size,
as shown in this figure, for a network with 10 nodes
the number of used DODAG roots is three node, and
for 20 nodes it uses four DODAG roots, then for
100 nodes it uses one DODAG root. That is because
the high packets delivery ratio compared to OF0 and
MARHOF.
Our experiments show that the proposed objective
function QCOF provides the best result compared to
the existing works OF0 and MRHOF, according to the
measured performance metrics: throughput, packet
delivery ratio, packet delivery ratio according to their
priority, average energy consumption.
6 CONCLUSIONS
In this paper, we have proposed a new RPL’s objec-
tive function QCOF, which attempts to avoid con-
gestion in order to respect real-time application re-
quirements, while sensor nodes can perform energy
harvesting and use PowerControl. After comparing
QCOF with the existing objective functions that use
only one, two or three metrics that are not sufficient
to meet the application requirements, we found that
QCOF is more appropriate to respect real-time ap-
plication requirements, where QCOF combines five
metrics, such as node rank, real-time constraints, en-
ergy constraints, link capacity (Threshold), and In-
put/Output. QCOF is not like other related existing
objective functions, where it sends packets according
to their priorities, and in case paths fail, nodes can
ask for new DODAG roots, that are assigned accord-
ing to their availability and node positions. In fact,
we propose new RPL’s control messages, i.e., NDR
and NDR-Ack. NDR sends from the node which an-
nounced path fails to a set of DODAG roots, if there
is an available DODAG root near to that node, then
it replies by NDR-Ack. Once the node receives the
NDR-Ack, it adds this DODAG root as a preferred
parent and starts forwarding data.
Extensive simulation experiments show that the
proposed objective function achieves a significant im-
provement over the related works, where it achieves
the highest packets delivery ratio, in particular, pack-
ets delivery ratio according to packet priorities, and
the best throughput compared with a low average in
the consumed energy. As future work, we plan to im-
plement QCOF in practice on real case study.
REFERENCES
Aissa, Y. B., Bachir, A., Khalgui, M., Koubaa, A., Li, Z.,
and Qu, T. (2019). On feasibility of multichannel re-
configurable wireless sensor networks under real-time
and energy constraints. IEEE Transactions on Sys-
tems, Man, and Cybernetics: Systems, pages 1–16.
Aissa, Y. B., Mosbahi, O., Khalgui, M., and Bachir, A.
(2018). New scheduling mechanism in multi-channel
reconfigurable wsn under qos and energy constraints.
In 32nd annual European Simulation and Modelling
Conference 2018, pages 187–191, Ghent, Belgium.
Al-Kashoash, H. A., Al-Nidawi, Y., and Kemp, A. H.
(2016). Congestion-aware rpl for 6l0wpan net-
works. In 2016 Wireless Telecommunications Sympo-
sium (WTS), pages 1–6. IEEE.
Al-Kashoash, H. A., Hafeez, M., and Kemp, A. H. (2017).
Congestion control for 6lowpan networks: A game
theoretic framework. IEEE internet of things journal,
4(3):760–771.
Al-Turjman, F. M. (2017). Information-centric sensor net-
works for cognitive iot: an overview. Annals of
Telecommunications, 72(1-2):3–18.
Gaddour, O. and Koub
ˆ
aa, A. (2012). Rpl in a nutshell: A
survey. Computer Networks, 56(14):3163–3178.
Gaddour, O., Koub
ˆ
aa, A., and Abid, M. (2015). Quality-of-
service aware routing for static and mobile ipv6-based
low-power and lossy sensor networks using rpl. Ad
Hoc Networks, 33:233–256.
Gaddour, O., Koub
ˆ
aa, A., Baccour, N., and Abid, M.
(2014). Of-fl: Qos-aware fuzzy logic objective func-
tion for the rpl routing protocol. In 2014 12th Inter-
national Symposium on Modeling and Optimization
in Mobile, Ad Hoc, and Wireless Networks (WiOpt),
pages 365–372. IEEE.
Ghaleb, B., Al-Dubai, A., Ekonomou, E., Alsarhan, A.,
Nasser, Y., Mackenzie, L., and Boukerche, A. (2018).
QCOF: New RPL Extension for QoS and Congestion-Aware in Low Power and Lossy Network
567

A survey of limitations and enhancements of the ipv6
routing protocol for low-power and lossy networks: A
focus on core operations. IEEE Communications Sur-
veys & Tutorials.
Ghribi, I., Abdallah, R. B., Khalgui, M., Li, Z., Alnowi-
bet, K., and Platzner, M. (2018). R-codesign: Code-
sign methodology for real-time reconfigurable embed-
ded systems under energy constraints. IEEE Access,
6:14078–14092.
Gnawali, O. and Levis, P. (2012). The minimum rank with
hysteresis objective function. Technical report.
Gu, C., Li, Z., Wu, N., Khalgui, M., Qu, T., and Al-Ahmari,
A. (2018). Improved multi-step look-ahead control
policies for automated manufacturing systems. IEEE
Access, 6:68824–68838.
Guo, J., Orlik, P., and Bhatti, G. (2013). Loop free dodag lo-
cal repair. draft-guo-roll-loop-free-dodag-repair-01.
Hafidi, Y., Kahloul, L., Khalgui, M., Li, Z., Alnowibet, K.,
and Qu, T. (2018). On methodology for the verifica-
tion of reconfigurable timed net condition/event sys-
tems. IEEE Transactions on Systems, Man, and Cy-
bernetics: Systems, (99):1–15.
Hafidi., Y., Kahloul., L., Khalgui., M., and Ramdani., M.
(2019). On improved verification of reconfigurable
real-time systems. In Proceedings of the 14th Interna-
tional Conference on Evaluation of Novel Approaches
to Software Engineering - Volume 1: ENASE,, pages
394–401. INSTICC, SciTePress.
Karoui, O., Khalgui, M., Koub
ˆ
aa, A., Guerfala, E., Li, Z.,
and Tovar, E. (2017). Dual mode for vehicular platoon
safety: Simulation and formal verification. Informa-
tion Sciences, 402:216–232.
Khalgui, M., Carpanzano, E., and Hanisch, H.-M. (2008).
An optimised simulation of component-based em-
bedded systems in manufacturing industry. Interna-
tional Journal of Simulation and Process Modelling,
4(2):148–162.
Khalgui, M., Mosbahi, O., and Li, Z. (2019). On recon-
figuration theory of discrete-event systems: From ini-
tial specification until final deployment. IEEE Access,
7:18219–18233.
Khalgui, M., Rebeuf, X., and Simonot-Lion, F. (2005). A
schedulability analysis of an iec-61499 control appli-
cation. IFAC Proceedings Volumes, 38(2):71–78.
Khalgui, M., Rebeuf, X., and Simonot-Lion, F. (2007). A
deployment method of component based applications
on distributed industrial control systems. European
Jounal of Automated Systems, 41(6):707–732.
Khalgui, M. and Thramboulidis, K. (2008). An iec61499-
based development approach for distributed industrial
control applications. International Journal of Mod-
elling Identification and Control, 4(2):186.
Khallef, W., Molnar, M., Benslimane, A., and Durand, S.
(2017). Multiple constrained qos routing with rpl. In
2017 IEEE International Conference on Communica-
tions (ICC), pages 1–6. IEEE.
Kim, H.-S., Cho, H., Kim, H., and Bahk, S. (2017a). Dt-rpl:
Diverse bidirectional traffic delivery through rpl rout-
ing protocol in low power and lossy networks. Com-
puter Networks, 126:150–161.
Kim, H.-S., Kim, H., Paek, J., and Bahk, S. (2017b). Load
balancing under heavy traffic in rpl routing protocol
for low power and lossy networks. IEEE Transactions
on Mobile Computing, 16(4):964–979.
Kumar, A., Zhao, M., Wong, K.-J., Guan, Y. L., and Chong,
P. H. J. (2018). A comprehensive study of iot and
wsn mac protocols: Research issues, challenges and
opportunities. IEEE Access, 6:76228–76262.
Lakhdhar, W., Mzid, R., Khalgui, M., Li, Z., Frey, G., and
Al-Ahmari, A. (2018). Multiobjective optimization
approach for a portable development of reconfigurable
real-time systems: From specification to implementa-
tion. IEEE Transactions on Systems, Man, and Cyber-
netics: Systems, (99):1–15.
Lamaazi, H. and Benamar, N. (2017). Rpl enhancement us-
ing a new objective function based on combined met-
rics. In 2017 13th International Wireless Communi-
cations and Mobile Computing Conference (IWCMC),
pages 1459–1464. IEEE.
Lodhi, M. A., Rehman, A., Khan, M. M., and Hussain, F. B.
(2015). Multiple path rpl for low power lossy net-
works. In 2015 IEEE Asia Pacific Conference on Wire-
less and Mobile (APWiMob), pages 279–284. IEEE.
Molisch, A. F., Balakrishnan, K., Chong, C.-C., Emami, S.,
Fort, A., Karedal, J., Kunisch, J., Schantz, H., Schus-
ter, U., and Siwiak, K. (2004). Ieee 802.15. 4a channel
model-final report. IEEE P802, 15(04):0662.
Naidji, I., Smida, M. B., Khalgui, M., and Bachir, A.
(2018). Non cooperative game theoretic approach
for residential energy management in smart grid. In
The 32nd Annual European Simulation and Modelling
Conference, pages 164–170, Ghent, Belgium.
Qin, M., Li, Z., Zhou, M., Khalgui, M., and Mos-
bahi, O. (2012). Deadlock prevention for a class of
petri nets with uncontrollable and unobservable tran-
sitions. IEEE Transactions on Systems, Man, and
Cybernetics-Part A: Systems and Humans, 42(3):727–
738.
Ramdani, M., Kahloul, L., and Khalgui, M. (2018). Au-
tomatic properties classification approach for guiding
the verification of complex reconfigurable systems. In
Proceedings of the 13th International Conference on
Software Technologies - Volume 1: ICSOFT,, pages
591–598. INSTICC, SciTePress.
Ramdani., M., Kahloul., L., Khalgui., M., and Hafidi., Y.
(2019). R-TNCES rebuilding: A new method of ctl
model update for reconfigurable systems. In Proceed-
ings of the 14th International Conference on Eval-
uation of Novel Approaches to Software Engineer-
ing - Volume 1: ENASE,, pages 159–168. INSTICC,
SciTePress.
Shelby, Z., Chakrabarti, S., Nordmark, E., and Bormann, C.
(2012). Neighbor discovery optimization for ipv6 over
low-power wireless personal area networks (6low-
pans). Technical report.
Talebi, M., Papatsimpa, C., and Linnartz, J.-P. M. (2018).
Dynamic performance analysis of ieee 802.15. 4 net-
works under intermittent wi-fi interference. In 2018
IEEE 29th Annual International Symposium on Per-
sonal, Indoor and Mobile Radio Communications
(PIMRC), pages 1–7. IEEE.
ICSOFT 2019 - 14th International Conference on Software Technologies
568

Thubert, P. (2012). Objective function zero for the rout-
ing protocol for low-power and lossy networks (rpl).
Technical report.
Wang, D., Li, W., and Wang, P. (2018). Measuring two-
factor authentication schemes for real-time data ac-
cess in industrial wireless sensor networks. IEEE
Transactions on Industrial Informatics.
Wang, J. and Chalhoub, G. (2019). Mobility support en-
hancement for rpl with multiple sinks. Annals of
Telecommunications, pages 1–14.
Wang, Z., Zhang, L., Zheng, Z., and Wang, J. (2016). An
optimized rpl protocol for wireless sensor networks.
In Parallel and Distributed Systems (ICPADS), 2016
IEEE 22nd International Conference on, pages 294–
299. IEEE.
Winter, T., Thubert, P., Brandt, A., Hui, J., Kelsey, R.,
Levis, P., Pister, K., Struik, R., Vasseur, J.-P., and
Alexander, R. (2012). Rpl: Ipv6 routing protocol for
low-power and lossy networks. Technical report.
Zeinab, K. A. M. and Elmustafa, S. A. A. (2017). Internet
of things applications, challenges and related future
technologies. World Scientific News, 2(67):126–148.
QCOF: New RPL Extension for QoS and Congestion-Aware in Low Power and Lossy Network
569
