
Enhanced Particle Swarm Optimisation and Multi Objective
Optimization for the Orchestration of Edge Cloud Clusters
Hafiz Faheem Shahid and Claus Pahl
Free University of Bozen-Bolzano, Bolzano, Italy
Keywords:
Swarm Intelligence, Particle Swarm Optimization, Distributed Systems, Load Balancing, Edge Cloud Cluster.
Abstract:
Load balancing and workload distribution cause challenges for the management of IoT and distributed systems
in the edge computing environment. Swarm intelligence is a technology suitable for the management of dis-
tributed systems, networks, communication and routing protocols. Swarm intelligence-based PSO algorithms
(particle swarm optimization) can be applied for load balancing and task scheduling in cloud computing en-
vironments operating through a broker agent. In distributed cloud environments, data is collected and then
processed at the center of the cloud, rather than making decision at edge nodes closer to IoT infrastructures.
Here, we develop an automated orchestration technique for clustered cloud architectures. An Autonomous
Particle Swarm Optimization, called the A-PSO algorithm, is implemented that enables an edge node, such as
a remote storage, to work as part of a decentralized, self-adaptive intelligent task scheduling and load balancing
agant between resources in distributed systems. Using Multi Objective Optimization (MOO), complementing
the A-PSO algorithm, we also include metrics such as Actual Round-Trip Time (ARTT) of tasks assignments
to the remote storage to reduce the execution cost. Our A-PSO algorithm can orchestrate the distribution of
large volumes of data to remote storage and back in cluster, i.e., coordinated distributed cloud environments.
1 INTRODUCTION
Task scheduling and allocation of tasks to cloud re-
sources is a load balancing problem that needs to be
optimized in cloud environments. Resource manage-
ment and load balancing are an important part of any
cloud computing environment in a distributed context.
With the advancement of hardware and software ap-
plication, a remaining problem is the optimization of
distributing (i.e., storing and fetching) data in cloud
clusters (1; 1; 1). The problem we are discussing here
is to balance the load between the remote data stor-
ages as a sample type of a cloud resource. We can of-
ten experience that with limited resources of remote
data storage in edge cloud applications, sometimes
applications show performance degradations (1) re-
sulting from may uncertainties in the environment (1).
This can happen when the number of transactions in-
creases dramatically, possibly causing downtime.
In recent years, swarm intelligence algorithms
have been widely used, specifically using swarm in-
telligence techniques for the development of dis-
tributed systems, networks, communications and
routing protocols. The two basic swarm intelli-
gence algorithms, that are used for the development
of collective behavior of applications and software
are Stochastic Diffusion Search (SDS) and Particle
Swarm Optimization (PSO). SDS is often seen as
representing the collective behavior of social insects
(such as ants) and PSO the collective behavior of so-
cial animals (birds and fish) (2). In SDS and PSO
algorithms, social interaction and exchange of infor-
mation is the significant key role that is practiced by
the social animal and social insects in swarm intelli-
gence. A basic strategy behind these two algorithms
of SDS and PSO is to work in a swarm to achieve the
target instead of working individually (3).
The aim of this paper is to explore the suitabil-
ity of bio-inspired algorithms for autonomous cloud
resource management. The solution shall be based
on applying a swarm intelligence approach to coordi-
nate workloads between cloud resource clusters and
to manage them in dispersed settings. Swarm intelli-
gence as a form of distributed intelligence is about im-
plementing algorithms for distributed systems man-
agement using Particle Swarm Optimization (PSO) or
Ant Colony Optimization (ACO), and adapt them to
schedule task fairly to the cloud resources (storage in
our case) and balance the load correspondingly be-
tween them (16). Cloud technology is moving to-
Shahid, H. and Pahl, C.
Enhanced Particle Swarm Optimisation and Multi Objective Optimization for the Orchestration of Edge Cloud Clusters.
DOI: 10.5220/0008019201550162
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 155-162
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
155

wards multi-cloud environments with the inclusion
of various devices, data storages and sensors at the
edges (0). This requires the integration of data cen-
ter technologies with much more constrained devices,
but still using virtualized solutions to deal with scala-
bility, flexibility and multi-tenancy concerns.
We aim at an automated orchestration technique
for edge cloud PaaS (Platform as a Service) architec-
tures based on workloads that are deployed in several
local edge clusters. For edge clouds, application and
service orchestration can help to manage and orches-
trate applications through containers (17). In this way,
computation can be brought to the edge through an
orchestration technique, rather than transferring large
volumes of data from the edge to the cloud.
The paper is organised as follows. We start with
background and related work in Section 2. Section 3
introduces our extended PSO solution in the context
of related work. Section 4 describes the experimental
evaluation. In Section 5, we discuss the results, before
concluding in Section 6.
2 BACKGROUND
With the proliferation of internet-capable devices,
workload distribution in cloud computing is becom-
ing major problem. Here, we propose a method of
load balancing at storage resource level based on Par-
ticle Swarm Optimization (PSO) algorithm. In many
existing load balancing solutions, a broker node plays
an important role for task scheduling to the resources.
In our proposed autonomous PSO algorithm, there is
no central broker node to assign and executes to the
virtual machines. The data computation is held in be-
tween the edge nodes (resource hosts) instead of send-
ing information for decisions to the central broker or
controller node of the cloud computing environment.
We focus on Particle Swarm Optimization (PSO)
for the development of our orchestration solution.
PSO is inspired by the social behavior of birds flock-
ing and fish schooling (4), (5). A particle in PSO re-
flects to a bird or fish that moves from one position to
another to reach its best position to find for instance
food and a safe place. The movement of the particle is
determined by the velocity, which has both direction
and magnitude. At any instance of time the position
of the particle is influenced by its best position (pbest)
and the position of the best particle in entire swarm
(gbest). To calculate the performance of each particle
in the swarm, we must apply an objective function.
The velocity of flocking birds is continuously chang-
ing and thus the positions of birds in swarm will also
need to change continuously (6), (7), (8), (9), (10).
In order to provide some background, we intro-
duce two basic equations of PSO algorithms that up-
date the velocity and position of a swarm particle:
v
k+1
i
= wv
k
i
+C1r1x(pbest
k
i
− x
k
i
) +C2r2x(gbest − x
k
i
)
(1)
x
k+1
i
= x
k
i
+ v
k+1
i
(2)
PSO algorithm (1) describes the updated velocity
of the particle and equation (2) describes the updated
position of that particle (18). The parameters of the
equations are summarised in Table 1.
Table 1: PSO – Parameters.
pbest
k
i
best position of particle i
gbest position of best particle in swarm
v
k
i
current velocity of particle i at k iteration
v
k+1
i
velocity of particle i at k+1 iteration
x
k
i
current position of particle i at k iteration
x
k+1
i
position of particle i at k+1 iteration
w inertia
c1,c2 acceleration coefficient factor
r1,r2 random number between 0 to 1
3 PSO+MOO LOAD BALANCING
Our overall solution combines Particle Swarm Op-
timization (PSO) and Multi Objective Optimization
(MOO), which we will introduce in sequence.
3.1 Load Balancing with PSO
We now map the PSO algorithm to our problem of
load balancing in edge clouds as follows:
• we choose the cloud storage resources (RES) as
particles;
• we define the velocity v
k
i
of particle i at iteration k
as change of load below; and
• we interpret the direction d as the number of stor-
age resources connected.
We consider in our adapted PSO algorithm the cur-
rent load CL
k
i
on the RES
i
at iteration k for our load
balancing problem. The load on the RES
i
will up-
date to CL
k+1
i
at iteration k + 1, after every iteration
of incoming tasks, see Equation (3). The objective
function in Equation (4) calculates the fitness value
of each RES to get Global best (gbest) and Personal
best (pbest) values of the RESs. In load balancing,
we use the objective function min f
min
(x) to obtain
the best minimum fitness value of the resource.
CL
k+1
i
= 1(pbest) + (CL
k
i
–pbest) (3)
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
156

f
min
(x
k+1
i
) = (CL
k+1
i
/MaxStorage
i
) × d (4)
After each Iteration, the load on the resources RES
is updated by Equation (3). Incoming tasks to the next
iteration could be different in size and varying in their
numbers. We can set the limit of incoming tasks be-
tween any two numbers. After updating the load on
resources, each RES resource needs to change its po-
sition in a queue for accepting the incoming load. In
Equation (4), CL
k+1
i
is the current load on the cloud
storage resournce i in any iteration k+1. MaxStorage
i
is the maximum storage capacity or upper limit of
storing data at the same iteration, where d denotes the
direction of the particle.
We interpret the direction d as the number of stor-
age resources connected under control of the PSO al-
gorithm. Thus, for our load balancing, we use the
f
min
(x
k+1
i
) objective function, because we need to find
the best resource (data storage) with the minimum
memory load in the entire swarm of resources RES
(19). The cloud storage resource that has the mini-
mum fitness value in the cluster of RESs is the global
best position of RES in the cloud.
In order to illustrate this, we use an example of
three cloud resources that provide 3 different storage
services with a maximum memory capacity of 100,
150, or 200 MBs in them. After 1, 2 and 3 iterations,
we get the current load on each RES as follows:
Cloud Storage Resource 1 (RES 1):
1. CLi
k+1
: current load on RES 1 = 25 MBs
2. MaxStorage
i
: max capacity on RES 1 = 100 MBs
which we add to the objective function (4) as follows:
f
min
(RES 1) = (CL
k+1
i
/MaxStorage
i
) d
f
min
(RES 1) = (25/100) 3
with d as the number of resources in the RES swarm:
f
mi
(RES 1) = 0.75
Cloud Storage Resource 2 (RES 2):
1. CL
k+1
i
: current load on RES 2 = 47 MBs
2. MaxStorage
i
: max capacity on RES 2 = 150 MBs
which we add to the objective function (4) as follows:
f
min
(RES 2) = (CL
k+1
i
/MaxStorage
i
) d
f
min
(RES 2) = (47/150) 3
with d as above and:
f
min
(RES 2) = 0.94
Cloud Storage Resource 3 (RES 3):
1. CL
k+1
i
: current load on RES 3 = 39 MBs
2. MaxStorage
i
: max capacity on RES 3 = 200 MBs
which we add to the objective function (4) as follows:
f
min
(RES 3) = (CL
k+1
i
/MaxStorage
i
) d
f
min
(RES 3) = (51/200) 3
with d as above and:
f
min
(RES 3) = 0.76
After this, we have obtained the personal best values
for the 3 resources, which are 0.75, 0.94 and 0.76 re-
spectively. The global best for the entire swarm is
0.75, which corresponds to resource 1.
After each iteration of incoming load on re-
sources, the objective function (4) calculates pbest
values for each RES. As we are using the objec-
tive minimum function f
min
(x
k+1
i
) that reflects the re-
source with minimum load on it among all resources.
This is said to be the gbest resource of the swarm.
Table 2: A-PSO Load Balancing Algorithm – Parameters.
MaxStorage
i
: total storage capacity on RESi
Dimension: d number of RESs
pbest
k
i
personal best position of RESi at iteration k
gbest
k
i
global best position of RESi at iteration k
CL
k
i
current load on RESi at iteration k
(initial velocity of particle i in PSO)
CL
k+1
i
updated load on RESi at iteration k +1
(updated velocity of particle i in PSO)
x
k
i
current position of RESi at iteration k
x
k+1
i
updated position of RESi at iteration k +1
After updating the load on RES i, the position of
the resource at iteration k,x
k
i
will also change. The
gbest RES then moves forward in the priority queue
and lead the rest of the RESs by means of balancing
load. The positions of the RESs in the cloud will be
updated by the load of incoming tasks at iteration k +
1. Then x
k+1
i
is the position of RES
i
at iteration k + 1.
When a resource reaches a threshold load of 60%
or higher, then it shall be made temporarily unavail-
able for further tasks. In that case, the tasks in the
incoming task queue will need to be dealt with by
other resources in the swarm that are still in a work-
able state. A backup resource shall also be provided in
case all primary resources have reached their thresh-
old load of 60%.
3.2 PSO Load Balancing with MOO
As an enhancement of the A-PSO algorithm, we com-
bine our load balancing PSO solution with multi ob-
jective optimization. When we have a higher num-
ber of iterations for the incoming load for resources,
we naturally observe that task execution takes longer.
For the management of distributed systems, our A-
PSO algorithms does distribute load equally to re-
sources and balances the load between edge nodes
correspondingly, but on the other hand its cost for task
Enhanced Particle Swarm Optimisation and Multi Objective Optimization for the Orchestration of Edge Cloud Clusters
157

assignment cycles per seconds becomes higher. The
challenges we are facing is to minimize the execu-
tion cost along with balancing load for the distributed
management in the edge cloud environment. To over-
come the problems, we decided to apply Multi Ob-
jective Optimization (MOO) (13) in conjunction with
the PSO solution. For MOO we aim to minimize the
execution cost in task scheduling along with the A-
PSO algorithm to balance the load. Time costing is
based on the execution of tasks as cycles per millisec-
ond. At every iteration with new tasks, the execution
of tasks at the resource can be calculated in millisec-
onds. A single cycle is assumed to consist here of
100 milliseconds as a default, i.e., 200 milliseconds
to execute a storage request corresponds to 2 cycles.
For each iteration we know the execution cost for a
swarm resource. For the next iteration, we can reduce
the execution cost by assigning the task to the virtual
machine that takes the minimum number of cycles to
execute. We prioritize resource requests dealt with
by A-PSO additionally with respect to the minimum
number of cycles they take during every iteration.
Table 3: Variables for Time Costing in Load Balancing.
N: Number of tasks
M: Number of virtual machines
EET : Expected Execution Time
ET T : Expected Transmission Time
ART T : Actual Round-Trip Time
Load
j
: Load on RES
j
X
i j
: Decision to allocate task i to RES
j
or not [0,1]
In order to reduce the number of cycles of task
execution at the resources, we adopt the time costing
definitions (5), (6) and (7) (11).
Min
cost
=
n
∑
.
m
∑
.EET
i j
∗ x
i j
(5)
Min
cost
=
n
∑
.
m
∑
.ET T
i j
∗ x
i j
(6)
ART T
i j
= EET
i j
+ ET T
i j
(7)
In the following, we consider cost with respect
to the Expected Execution Time (EET), Expected
Transmission Time (ET R) and Expected Round-Trip
Time (ERT T ) factors.
• Expected Execution Time (EET ) is defined as
EET
i j
of Task
i
on resource RES
j
denoting the
time of a task from initialization to the eventual
termination at the execution point (11). Our goal
is to minimize the EET to reduce the time costing
in the load balancing process (12).
• Expected Transmission Time (ET T ): ET T
i j
of
Task
i
on resource RES
j
is the time from the as-
signment of the task to the resource to the com-
plete transmission of the actual task (6).
• Actual Round-Trip Time (ART T ): we can cal-
culate the ART T
i j
of Task
i
on resource RES
j
by
equation (7). We sum up the time of execution
EET
i j
with the transmission time ET T
i j
to min-
imize the cost of load balancing (7) (13). Divid-
ing the ART T by 100, we get the number of exe-
cution cycles per milliseconds. The number cy-
cles that each task management consumes indi-
cates the cost of the load balancing.
Task scheduling and load balancing is calculated with
respect to the execution cycle of tasks in milliseconds:
Execution Cycle = ART T
i j
/100
which defines the Actual Round-Trip Time of tasks
i
to RES
j
, i.e., ART T
i j
.
The prioritization of the resources based on the
time consumption considers:
• the current load on the storage resource (minimum
value of fitness by object function Equation (4) ),
• that the resource takes minimum cycle per mil-
liseconds to execute tasks based on Equation (7).
We set each iteration weight for an automated solution
of PSO for task scheduling and load balancing from 0
to 10. 0 is the minimum number and 10 is the max-
imum weight of each iteration. If the weight of the
iteration is between 0-7 (random value generated at
each iteration between 0-10), then the system assigns
tasks to storage resources with respect to the fitness
value of the resources. A global best RES(gbest) will
be one with the minimum f .v following equation (4).
If the iteration weight is between 8-10, then the so-
lution assigns the incoming task to the resource that
takes the minimum number of cycles to execute them.
In this case, the global best RES(gbest) is the one that
costs the minimum number of cycles to execute.
Below, we present the enhanced A-PSO algorithm
for task scheduling and load balancing.
————————————————————–
A-PSO Load Balancing and Scheduling
1. For all tasks (ti) ∈ T do
Determine incoming tasks
Determine size of each task
2. End for
3. For all resources (RESi) ∈ RES do
Determine current load on RESi by Eq. (4)
//Velocity of particle i in PSO algorithm
Determine real load on RESi
//Max storage of RES
4. End for
5. Initialize RES
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
158
6. While (current load on RESi < 60% ) stop condition
7. For all resources (RESi) do
Calculate fitness value of each RES by using
objective function, Eq. (4)
If
(current f .vi > pbest
i
)
pbest
i
= current f .v
i
End if
If
(pbest
i
< ∀ RESs personalbest)
gbest = pbest
i
End if
8. End for
9. For all resources RES do
Calculate execution time cost (7) in msec
Calculate task assignment to RES in msec
10. End for
11. Prioritize all tasks according to size
12. Prioritize all RESs with respect to minimum f .v(4) ||
Prioritize all RES according to min task exec cy-
cles/msec
13. For all Prioritized tasks (t
i
) ∈ T do
For all Prioritized resources (RESj) ∈ RES do
If (iteration weight between 0-7 &&
current load in RES
j
<= 60%)
assign task(t
i
) to resource (RES
j
)
remove task from sorted tasks queue
current load RES
j
+ +
End if
Else If (iteration weight between 8-10 &
current load in RES
j
<= 60%)
assign task (t
i
) to resource (RES
j
)
remove task from sorted task queue
current load RES
j
+ +
End if
Else
Break // (assign next task (t
i
) in queue
to next (RES
j
))
End for
14. End for
15. Update current load on RESs // Equation (3)
16. Update position of RES // objective function (4)
17. End for
—————————————————————-
We distinguish non-prioritized requests of incom-
ing tasks with different sizes that will receive a cloud
resource storage position after updating the overall
load, and prioritized ones. The latter are incoming
tasks sorted with respect size in descending order for
execution. Also, resources are sorted wrt. their posi-
tion, considering minimum fitness value in descend-
ing order for receiving incoming task load and also
minimum cycles to execute incoming tasks.
4 IMPLEMENTATION
In order to implement an autonomous solution for a
decentralised architecture, we need to avoid an often
used central broker node from the system that assigns
the task to remote storage. For instance, many tools
for the experimentation of load balancing and task
scheduling exist, like CloudSim (7), (11), (14) as a
simulator. CloudSim for instance works with a cen-
tral broker node that has complete information of re-
sources as well as complete information of the tasks.
We implemented our autonomous A-PSO algorithm
in Java that works without centralised control.
In a sample experiment, we illustrate that how our
A-PSO algorithm works. For this scenario, we as-
sume three storage resources with different capacity
sizes. The tasks are also different in size. Three input
tasks are assigned to resources.
In the 1st iteration, we start with the following
sample task queue (Table 4):
Table 4: 1st Iteration – unsorted task queue.
Tasks T1 T2 T3
Size 9 6 13
The algorithm groups the incoming tasks (this is
the task information phase of general load balancing
systems) according to storage size. The task with the
maximum size will execute first (Table 5):
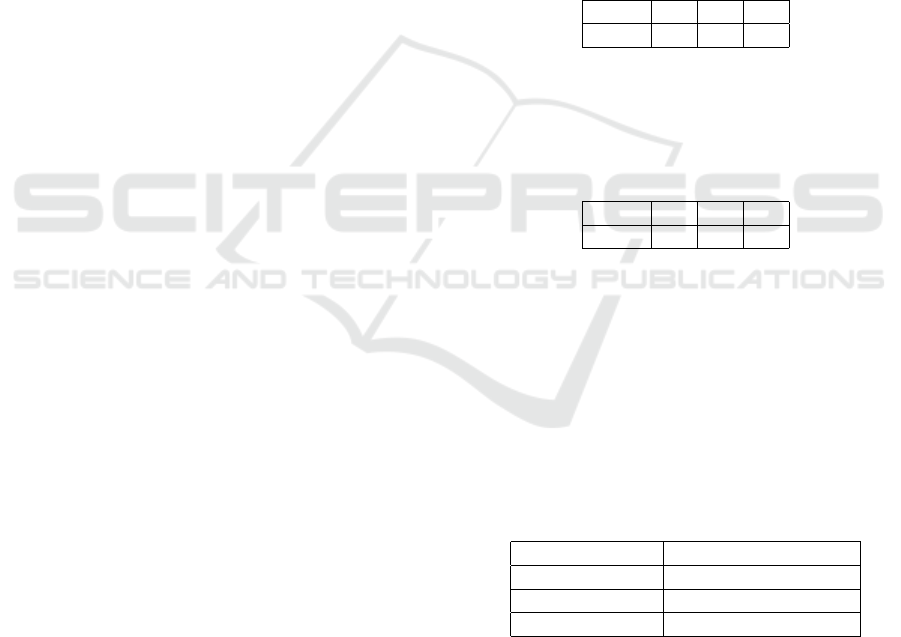
Table 5: 1st Iteration – sorted task queue.
Tasks T1 T2 T3
Size 6 9 13
Now the solution assigns these tasks to the re-
sources in a way that they should balance the load us-
ing the PSO algorithm that calculates the gbest value
of the resources using the objective function in Equa-
tion (4). In a group of prioritized resources, the gbest
resource with the least load is moved to the front of
the task allocation process. The personal best posi-
tions of the resources x
k
i
are then calculated. After-
wards, we move the tasks to resources, i.e., map from
Table 5 to Table 6, which is illustrated in Fig. 1.
Table 6: 1st Iteration – initial position of storage resources.
Resource (RES) Current Load on RES
c undefined
b undefined
a undefined
After updating the load on the resources (veloc-
ity of particles in PSO) CL
+1
i
at iteration step k + 1,
the resources change their positions x
k+1
i
accordingly.
Here, the objective function will calculate the fit-
ness value of each resource to find the pbest
k+1
i
and
gbest
k+1
i
at iteration step k +1.
As discussed before, the task with the maximum
size will be assigned to the resource positioned at the
Enhanced Particle Swarm Optimisation and Multi Objective Optimization for the Orchestration of Edge Cloud Clusters
159
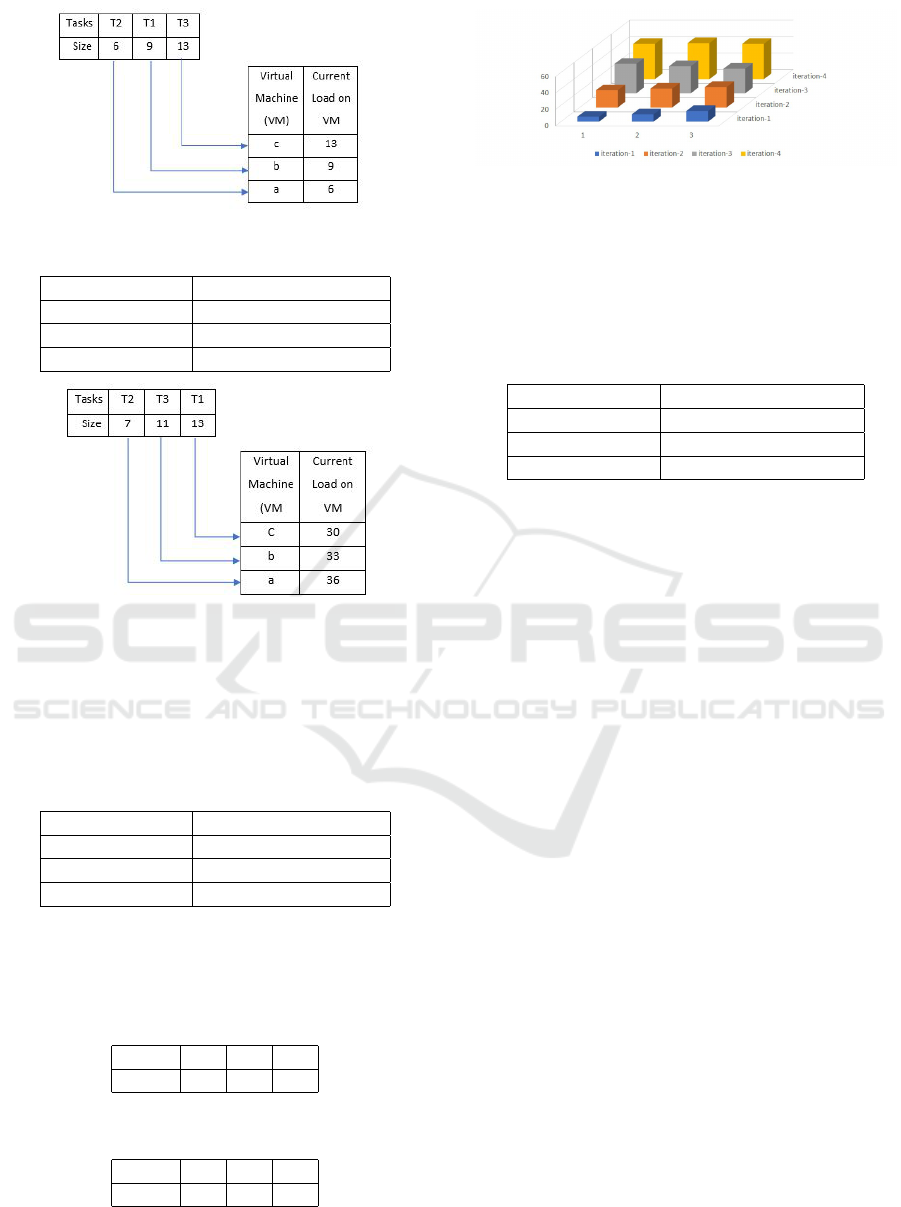
Figure 1: 1st Iteration mapping of tasks to resources.
Table 7: 1st Iteration – updated positions of resources.
Resource (RES) Current Load on RES
a 6
b 9
c 13
Figure 2: 4th Iteration mapping of tasks to resources.
top of the queue with the least load on it. Table 7
shows the updated positions of the resources x
k+1
i
.
After the 2nd and 3rd iteration, the updated load on
the resources is shown in Table 8.
Table 8: 3rd Iteration – updated load/position of resources.
Resource (RES) Current Load on RES
c 30
b 33
a 36
We continue this experiment with a fourth itera-
tion with a different size of input, but using the same
method as in iteration 1, see Tables 9 and 10.
Table 9: 4th Iteration – unsorted task queue.
Tasks T1 T2 T3
Size 13 7 11
Table 10: 4th Iteration – sorted task queue.
Tasks T1 T2 T3
Size 7 11 13
The sorted task requests are then as shown in Ta-
ble 10. Assigning tasks to resources is a mapping
Figure 3: Results – for each of the resources 1, 2 and 3 and
each of the 4 iterations, allocated task loads are shown.
from Table 10 to Table 11, illustrated in Fig. 2. Re-
sources with incoming inputs of tasks update their
load CL
k+1
i
and change position x
k+1
i
by calculating
the fitness value (objective function in Equation (4)).
Table 11: 4th-Iteration – updated load/postion of resources.
Resource (RES) Current Load on RES)
b 44
a 43
c 43
Based on the resulting stage in Table 11, we can
see that after the 4th iteration the load is balanced
among all resources connected in cluster.
Fig. 3 visualizes the task load allocated to the re-
sources for all iterations and resources.
5 EXPERIMENTAL VALIDATION
This section illustrates the experiments and their re-
sults that were obtained from evaluating the imple-
mentation of the proposed method.
In order to evaluate the research questions around
the load balancing problem for particularly edge
nodes in a distributed cloud environment, there are
some parameters that need to be defined. We de-
fine the following key variables in the proposed au-
tonomous A-PSO algorithm along with the cost esti-
mation cycles for task scheduling and load balancing
in cloud storage resources:
• Resources RES (cloud storage): range (2-5)
• Number of tasks in each iteration: range (2-6)
• Size (memory) of tasks randomly in each itera-
tion: range (0-100)
• Number of iterations: range (10-20)
• Iteration weight: a.) position of RESs by fitness
value: range (0-7); b.) position RESs by execu-
tions time cycles/ms: range (8-10)
• Max storage of RES1, RES2, RES3, RES4, RES
set to 300, 500, 200, 250, 400 MBs, resp.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
160
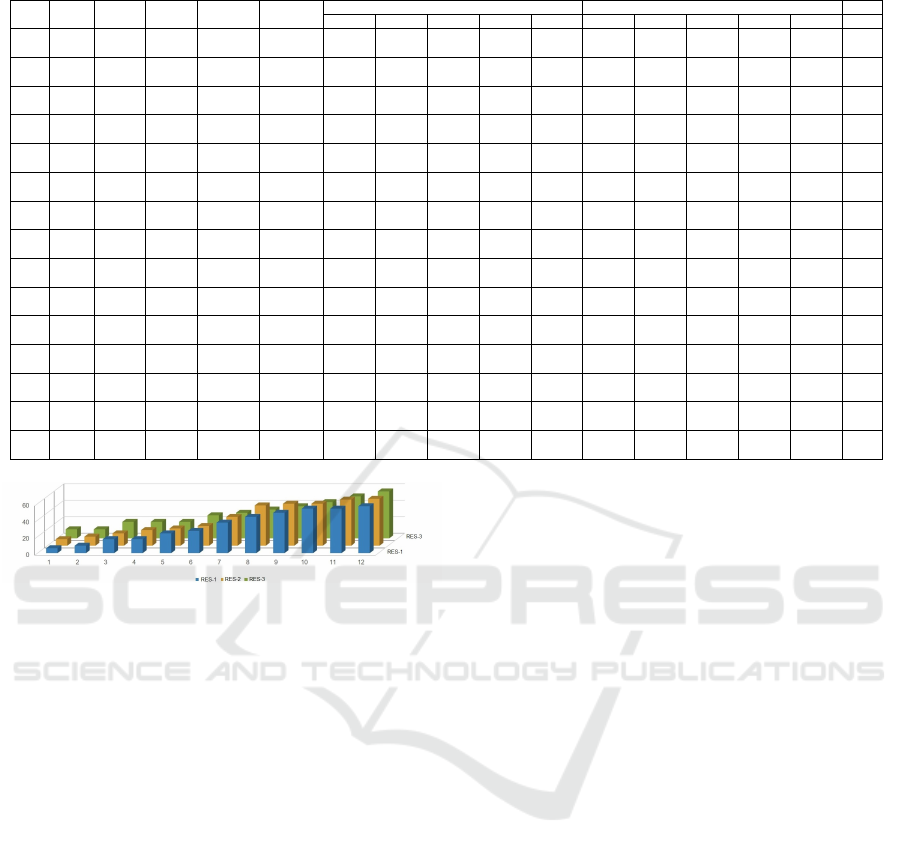
Table 12: Experimental Evaluation: Test cases and Results.
Sr. RES Tasks Task No Iter- Iteration Round-Trip Time (RT T ) Autonomous-PSO Algorithm BK
Size ation weight RES1 RES2 RES3 RES4 RES5 RES1 RES2 RES3 RES4 RES5
1. 5 3 0-15 15 0-7 14 18 16 1 7 16 14 32 23 15 N
8-10
2. 5 4 0-30 10 0-7 19 24 18 21 20 48 32 43 38 44 N
8-10
3. 4 3 0-15 15 0-7 26 28 21 4 - 27 25 29 25 - N
8-10
4. 3 3 0-15 15 0-7 15 16 14 - - 38 38 39 - - N
8-10
5. 3 3 0-30 10 0-7 13 16 15 - - 38 35 43 - - N
8-10
6. 3 5 0-30 10 0-7 21 21 19 3 - 67 31 71 16 - Y
8-10
7. 3 4 0-25 12 0-7 25 26 25 - - 57 57 57 - - N
8-10
8. 4 5 0-25 10 0-7 22 25 25 19 - 58 55 58 60 - N
8-10
9. 4 5 0-25 15 0-7 27 24 26 24 - 62 63 64 62 - N
8-10
10. 2 3 0-20 10 8-10 18 20 - - - 34 34 - - - N
8-10
11. 2 3 0-50 10 0-7 13 12 1 - - 72 61 17 - - Y
8-10
12. 2 5 0-30 15 0-7 23 23 17 - - 65 93 59 - - Y
8-10
13. 2 6 0-25 15 0-7 31 33 27 - - 63 65 67 - - Y
8-10
14. 3 2 0-100 10 0-7 13 14 1 1 - 72 67 80 10 - Y
8-10
15. 4 2 0-70 20 0-7 13 15 5 2 7 81 63 78 63 54 Y
8-10
Figure 4: Experimental Results – here the load for resources
RES hosting the storage tasks.
• Backup (BK) RES storage set to 1000 MBs
These are applied and shown in Table 12 below.
The test cases have been executed with both sug-
gested methods, thus combining the autonomous PSO
algorithm with the MOO-based execution cost cycles
for task scheduling and load balancing. The results
are presented in Table 12.
For instance, in the experimental test case 3, we
took 4 resources and 3 tasks in each iteration, and we
limited the size of tasks to between 0 to 15 (MBs).
The total number of iterations was 15. In the results,
we can see that the tasks are assigned to the cloud
storages equally by the autonomous PSO algorithm
and execution cycle management approach. Effec-
tively, the load is balanced between resources (cloud
storages) with minor difference in usage percentage.
Similarly, in experiment 4, we took 3 storage re-
sources, 3 tasks in each iteration, 15 as the number of
iterations and the size limits of incoming tasks were
0 to 15 MBs. As a results, we found that the total
number of execution cycles per milliseconds were 15,
16, 14 in RES1, RES2 and RES3, respectively. The
memory consumption was 38, 38 and 39 percent in
RES1, RES2 and RES3, respectively.
If we look at the results of test cases 7 and 10,
the tasks are scheduled to cloud storage resources
equally, with an exactly balanced corresponding load.
In test case 7, all 3 resources used up to 57 % of the
total memory. In test case 10, 2 resources with 3 tasks
in each iteration consumed 34 % of the total memory
to execute the tasks until their termination.
A summary view of these test cases is provided
in Fig. 4 that shows the continuous operation of the
selected use cases and the resulting successfully bal-
anced task load.
6 CONCLUSIONS
Our aim was to investigate the use of swarm intelli-
gence for task scheduling and load balancing in dis-
tributed systems, specifically considering distributed
cloud and edge computing environments. For this,
we introduced an autonomous Particle Swarm Opti-
mization (A-PSO) algorithm that we combined with
Multi-Objective Optimization (MOO) .
In many investigations and applications of PSO al-
gorithms for distributed systems management, for in-
stance simulation techniques include the involvement
of a central manager entity. Our work adopts and ex-
tends the standard PSO algorithm, but with the ex-
tension of s decentralized autonomous aspect. In ad-
dition, we also examined the cost of time to execute
iteratively incoming task allocation requests to stor-
age resources using multi objective optimization. By
referring to Actual Round-Trip Time, we can calcu-
Enhanced Particle Swarm Optimisation and Multi Objective Optimization for the Orchestration of Edge Cloud Clusters
161

late the execution time of one single task allocated
to a remote storage in cycles per milliseconds. The
experimental results show that our enhanced A-PSO
algorithm effectively balanced the load across the re-
sources available. Thus, the autonomous coordination
of task scheduling and load balancing here is realized
by combining the two approaches – firstly, the A-PSO
algorithm and secondly, the time costing together as
a form of Multi Objective Optimization (MOO) for
task scheduling, load balancing and reducing the exe-
cution cost of the incoming iterations of tasks for dis-
tributed system in the cloud computing environment.
In the future, we plan to extend the applicability
of the solution to a wider range of distrbuted systems
architecture, taking also other resource types such as
compute and network into account.
REFERENCES
Mishra, S. K., Sahoo, B., and Parida, P. P. (2018). Load
balancing in cloud computing: A big picture. Jrnl of
King Saud University - Comp and Inf Sciences.
Pahl, C., Jamshidi, P., and Zimmermann, O. (2018). Archi-
tectural principles for cloud software. ACM Transac-
tions on Internet Technology (TOIT) 18 (2), 17.
al-Rifaie, M. M., Bishop, J. M., and Caines, S. (2012). Cre-
ativity and autonomy in swarm intelligence systems.
Cognitive computation 4.3: 320-331.
von Leon, D., Miori, L., Sanin, J., El Ioini, N., Helmer, S.,
and Pahl, C. (2018). A performance exploration of ar-
chitectural options for a middleware for decentralised
lightweight edge cloud architectures. Intl Conf on In-
ternet of Things, Big Data and Security.
Jamshidi, P., Pahl, C., and Mendonca, N. C. (2016). Man-
aging uncertainty in autonomic cloud elasticity con-
trollers. IEEE Cloud Computing 3 (3), 50-60.
Tan, Y., Shi, Y., and Ji, X. (2012). Advances in Swarm In-
telligence: Third International Conference ICSI.
Eberhart, R. and Kennedy, J. (1995). A new optimizer us-
ing particle swarm theory. International Symposium
on Micro Machine and Human Science. IEEE.
von Leon, D., Miori, L., Sanin, J., El Ioini, N., Helmer, S.,
and Pahl, C. (2019). A Lightweight Container Mid-
dleware for Edge Cloud Architectures. Fog and Edge
Computing: Principles and Paradigms, 145-170.
Scolati, R., Fronza, I., El Ioini, N., Samir, A., and Pahl,
C. (2019). A Containerized Big Data Streaming Ar-
chitecture for Edge Cloud Computing on Clustered
Single-Board Devices. CLOSER.
Kennedy, J. (2010). Particle swarm optimization. Encyclo-
pedia of machine learning: 760-766.
Visalakshi, P. and Sivanandam, S. N. (2009). Dynamic task
scheduling with load balancing using hybrid particle
swarm optimization. Int. J. Open Problems Compt.
Math 2.3:475-488.
Al-Maamari, A. and Omara, F.A. (2015). Task schedul-
ing using PSO algorithm in cloud computing environ-
ments. Intl Journal of Grid and Distributed Computing
8.5:245-256.
Zhang, L. et al. (2008). A task scheduling algorithm based
on PSO for grid computing. Intl Journal of Computa-
tional Intelligence Research 4.1:37-43.
Sharma, S. and Agnihotri, M. (2016). A Particle Swarm
Optimization based Technique for Scheduling Work-
flow in Cloud DataCenter. Intl Journal of Engineering
Trends and Applications 3.4.
Pandey, S., Wu, L., Guru, S. M., and Buyya, R. (2010).
A particle swarm optimization-based heuristic for
scheduling workflow applications in cloud computing
environments. Intl Conference on Advanced Informa-
tion Networking and Applications.
Awad, A. I., El-Hefnawy, N. A., and Abdel kader, H. M.
(2015). Enhanced particle swarm optimization for task
scheduling in cloud computing environments. Proce-
dia Computer Science 65:920-929.
Selvarani, S., and Sudha Sadhasivam, G. (2010). Im-
proved cost-based algorithm for task scheduling in
cloud computing. International Conference on Com-
putational Intelligence and Computing Research.
Awad, A.I., El-Hefnawy, N.A., and Abdel kader, H.M.
(2015). Dynamic Multi-objective task scheduling in
Cloud Computing based on Modified particle swarm
optimization. Advances in Computer Science: an In-
ternational Journal 4.5:110-117.
Katyal, M. and Mishra, A. (2014). A comparative study of
load balancing algorithms in cloud computing envi-
ronment. arXiv preprint arXiv:1403.6918.
Acharya, J., Mehta, M., and Saini, B. (2016). Particle
swarm optimization based load balancing in cloud
computing. Intl Conf on Communication and Elec-
tronics Syst.
Mishra, R. and Jaiswal, A., (2012). Ant colony optimiza-
tion: A solution of load balancing in cloud. Intl Jour-
nal of Web & Semantic Technology 3.2:33.
Pahl, C. and Lee, B. (2015). Containers and clusters for
edge cloud architectures - a technology review. Intl
Conf on Future Internet of Things and Cloud.
Shi. Y. (2001). Particle swarm optimization: developments,
applications and resources. Proceedings Congress on
Evolutionary Computation Vol. 1.
Kalpana, C., Karthick Kumar, U., and Gogulan, R. (2012).
Max-Min Particle Swarm Optimization Algorithm
with Load Balancing for Distributed Task Scheduling
on the Grid Environment. Intl Journal of Computer
Science Issues 9.3.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
162
