
Tracking Verification Algorithm Based on Channel Reliability
JunChang Zhang
1,2
, ChenYang Xia
1
and JinJin Wan
2
1
Institute of Electronics and Information, Northwestern Polytechnical University, Xi’an 710072, China
2
Key Laboratory of Photoelectric Control Technology, Luoyang, Henan 471000 China
Keywords: Correlation filter, Channel reliability, Tracker, Validator, Siamese convolutional neural network
Abstract: For most algorithms, the problem of Tracking target performance degradation in the case of fast moving,
illumination changes, target deformation, occlusion, out-of-plane rotation, low-resolution images, etc. This
paper proposes a tracking verification algorithm based on channel reliability. The tracker part of the
algorithm is tracked by the method of correlation filter based on channel reliability. By calculating the
reliability weight of each feature channel of the input correlation filter, and multiplying the weight by the
response of the corresponding channel to obtain the final response, so that the target positioning will be
more accurate. The validator part uses the Siamese dual input network in the deep learning convolutional
neural network. Every few frames, the verifier will verify the results of the tracker part of the algorithm. If
the reliability is verified, the tracking result will not be modified. Otherwise, the validator will re-detect the
target location and verify the reliability through the Siamese dual-input network. The tracker will regard this
location as the new location of our target continues to be tracked, making target tracking more durable and
robust. The experimental evaluation of the OTB13 video sequence proves that the proposed algorithm has
good adaptability to target fast motion, illumination change, target deformation, occlusion, and out-of-plane
rotation, and has good robustness.
1 INTRODUCTION
As one of the basic technologies of computer vision,
target tracking technology is widely used in video
surveillance, human-computer interaction, robot
(Smeulders and Chu, 2014) and other fields.
Although the target tracking technology has
achieved a series of results in recent years, there are
still many difficulties and challenges in object
tracking, occlusion, rotation, illumination changes,
and posture changes.
Existing model-free visual tracking algorithms
are often classified as Discriminating or generating.
Discriminating algorithms can be learned by multi-
instance learning (MIL), compressed sensing, P-N
learning, structured output SVM (Hare, Golodetz,
Saffari, Vineet, Cheng, Hicks, and Torr, 2016),
online enhancement, and the like. In contrast, the
generated class tracker typically treats the tracking
as the most similar area of the search to the target.
To this end, various object appearance modeling
methods have been proposed, such as incremental
subspace learning and sparse representation (Fan
and Xiang, 2017) Currently, one of the new trends in
improving tracking accuracy is the use of deep
learning tracking methods (Fan and Ling, 2017, Ma,
Huang and Yang, 2015, Nam and Han, 2016)
because they have strong discriminative power, as
shown in (Nam and Han, 2016). However, the use of
deep learning-based tracking algorithms is
computationally intensive and less real-time.
Since MOSSE algorithm was proposed, the
correlation filter (CF) has been considered as a
robust and efficient method for visual tracking
problems (Bolme, Beveridge, Draper and Lui, 2010).
Currently, the proposed improvements based on the
MOSSE algorithm include the inclusion of kernel
and HOG features, the addition of color name
features or color histograms (Bertinetto, Valmadre,
Golodetz, Miksik, and Torr, 2016), and sparse fusion
tracking (Zhang, Bibi and Ghanem, 2016), adaptive
scales, mitigation of boundary effects (Danelljan,
Hager, Shahbaz Khan, and Felsberg, 2015), based on
Context-Aware correlation filter (Mueller, Smith,
Ghanem, 2017) and fusion of deep convolutional
network functions (Ma, Huang and Yang, 2015)
algorithm.
Zhang, J., Xia, C. and Wan, J.
Tracking Verification Algorithm Based on Channel Reliability.
DOI: 10.5220/0008095900590064
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 59-64
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
59
Although the speed or accuracy of the tracking
algorithms mentioned above has improved, real-time
high-quality tracking algorithms are still rare. So
seeking trade-offs between speed and accuracy is a
trend in future tracking (Mueller, Smith, Ghanem,
2017, Ma, Yang, Zhang and M.H. Yang, 2015).
Context-Aware Correlation Filter Tracking (Mueller,
Smith, Ghanem, 2017) proposes a new correlation
filter framework that can add more background
information and incorporate global background
information into the learned filters for processing.
The algorithm adds background information to the
Staple algorithm, and the robustness to large size
changes, background clutter and partial occlusion is
improved and the impact of speed is relatively small.
However, the algorithm is relatively less robust in
the target plane, out-of-plane rotation, dramatic
illumination changes, and fast motion. Therefore, in
order to better and more accurately track the target, a
tracking algorithm that balances the advantages and
disadvantages of both can be found between real-
time and high robustness. Therefore, this paper
proposes a video target verification tracking
algorithm based on channel reliability.
The algorithm in this article consists of two parts:
a tracker and a validator. The validator is
implemented by the Siamese network in the deep
learning convolutional neural network. These two
parts are independent of each other and work in
harmony. Advantages (1): The channel reliability
method is used to make the target positioning more
accurate. That is, each feature channel is added with
a corresponding weight, and then summed. (2):
Verify the result of the tracker every few frames.
When the verification system finds that the result of
tracking a certain frame is incorrect, it will re-target
the target to find the target position information and
put the target new. The position returns to the
tracker as the target position of the error frame,
causing the tracker to continue tracking from this
position.
2 THE TARGET VERIFICATION
TRACKING ALGORITHM
BASED ON CHANNEL
RELIABILITY
The algorithm in this paper consists of two parts:
tracker T and verifier V. The tracker is implemented
using a correlation filter method based on Context-
Aware to ensure real-time and location of the target.
At the same time, the tracker sends a verification
request to the validator with a fixed number of
frames and responds to feedback from the validator
by adjusting the tracking or updating model. The
validator is implemented using the Siamese network
in the deep learning convolutional neural network.
After receiving a request from the tracker, the
validator will first verify that the tracking results are
correct and then provide feedback to the tracker. The
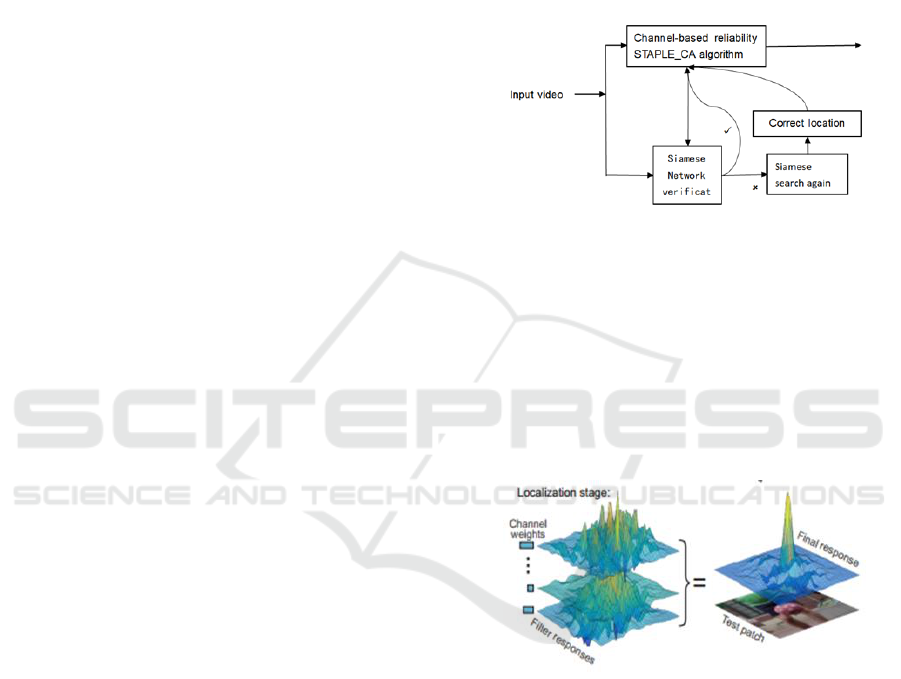
overall block diagram is shown in Figure 1.
Figure 1: Overall block diagram of video target
verification tracking algorithm based on channel reliability.
2.1 Channel Reliability Estimation
Channel reliability is calculated by constraining the
properties of least squares solutions during the filter
design process. The channel reliability score is used
to represent the weight of each channel filter
response when positioned, as shown in Figure 2.
Figure 2: Channel reliability weights calculated in the
constraint optimization step of correlation filter learning
reduce the noise of the weighted average filter response.
The characteristic channel reliability of the target
positioning phase is obtained by multiplying the
learning channel reliability measurement value and
the channel detection reliability measurement value.
Assume that is the total number of channels for a
given correlation filter Hog feature. The
corresponding set of mutually independent
channel features is
1:
wh
d
dd
dd
dN
f f f R
.
A discriminative feature channel
d
f
produces a
N
d
N
d
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
60

filter
d
w
whose output
dd
fw
is almost identical
to the ideal response g.
On the other hand, the output response is noisy
on feature channels with low discriminating power,
and the global response error due to least squares
will significantly reduce the peak of the maximum
response. Therefore, the value of channel learning
reliability is the maximum response of the learned
filter.
In the channel detection reliability measurement
phase, the expressive power of the main mode in
each channel response can indicate the detection
reliability of each channel. In addition, Bolme et al
also proposed a similar method to detect target loss.
Our measure is based on the ratio between the
second and first major mode in the response map, i.e.
.
Note that this ratio penalizes cases when
multiple similar objects appear in the target vicinity
since these result in multiple equally expressed
modes, even though the major mode accurately
depict the target position. To prevent such
penalizations, the ratio is clamped by 0.5. Therefore,
the per-channel detection reliability is estimated as:
(1)
2.2 Algorithm for Correlation Filter of
Context-Aware Based on Channel
Reliability
The traditional correlation filter tracking algorithm
uses ridge regression to classify. is a circular
matrix of all cyclically translated image blocks:
(2)
Unlike traditional correlation filter frameworks,
more background information is added to the
framework of Context-Aware Correlation Filter.
In each frame, we sample the k Context-Aware
image blocks around the target
according to a uniform sampling strategy (k=4). The
corresponding cyclic matrices are and
.
These Context-Aware image blocks contain
global background information that causes various
interference factors and different background forms,
which can be considered as true negative samples.
Intuitively, you need to learn a filter that has a high
response to the target and a filter that is close
to zero response to the background image
information patch block. The purpose is achieved by
adding a Context-Aware image patch block as a
normalization constraint to a standard formula (2).
The result is as follows, the response regression of
the target image block is the ideal response y, and
the context image block is returned to zero by the
parameter constraint .
(3)
Where corresponds to a cyclic matrix formed
by all cyclic shifts of image block based on
contextual background information obtained around
the target. indicates the number of associated
filter feature channels.
Therefore, the final response of the algorithm is
the product of the maximum response value obtained
by formula (3) and the reliability estimation value
of the feature channel detection, so that the
position information of the target can be more
accurately located.
2.3 Siamese Verification Network
This paper uses the Siamese network (Comaniciu,
Ramesh and Meer, 2000) to design the verifier V.
The network consists of two convolutional neural
network (CNN) branches and processes two inputs
separately. In this network, VGGNet (Perronnin,
Sanchez and Mensink, 2010) was borrowed from the
architecture of CNNS and an additional area pooling
layer was added. In the detection process, since V
needs to process a plurality of regions in the image,
and select one candidate most similar to the target as
an output result. Therefore, the region pooling layer
can simultaneously process a group of regions in
each frame of image, thereby significantly reducing
the amount of computation.
When the tracking result from T is input to the
Siamese network, if its verification score is lower
than the threshold , V considers that the frame
target tracking fails. In this case, V still uses the
Siamese network to re-detect the target. Unlike the
verification phase, the test needs to verify multiple
image patches in a local area and find the target with
the highest score.
The square area of size is centered on the
position of the tracking result in the verification
frame, which is the detection area. Where w and h
are the width and height of the tracking target, and β
is the target size factor.
1max2max
)
2
1
,min(1
1max2max
(det)
w
d
A
0
2
2
1
2
2
0
min
WyW
A
W
R
a
n
i
R
a
n
0
RA
nn
i
RA
nn
0
R
n
W
2
k
i d
i
dd
W
N
W
N
W
N
yW
ddd
AA
1
2
2
1
2
1
2
2
1
1
2
2
0
min
A
i
A
i
N
d
w
d
(det)
1
)(
22
2
1
hw
Tracking Verification Algorithm Based on Channel Reliability
61
The target candidate set generated by the sliding
window is recorded as , and the detection result
is obtained by:
(4)
,
obj i
v x c
represents the verification score
between the tracking target
obj
x
and the candidate
target
i
c
.
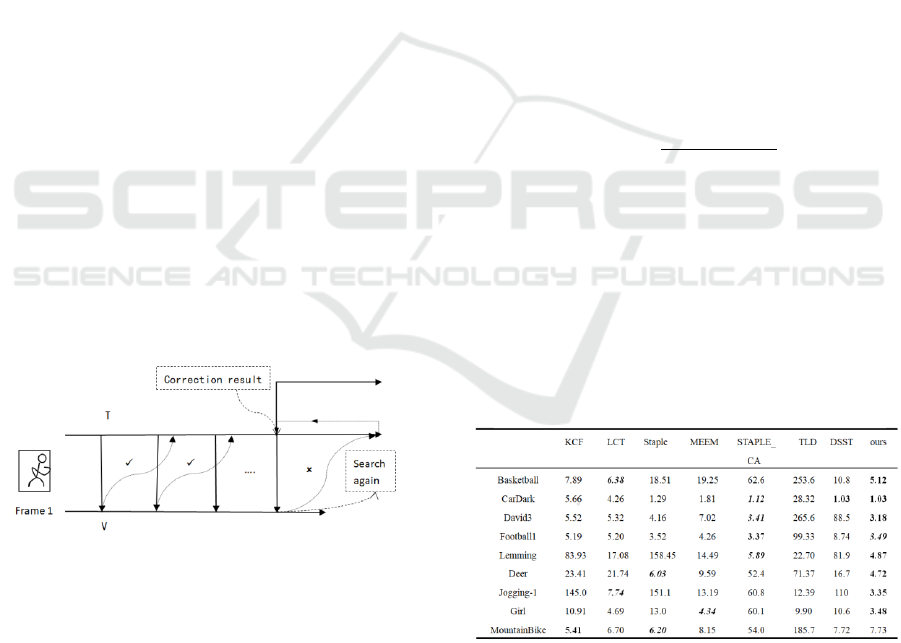
After obtaining the test results, we determine
whether to use it as an alternative to the tracking
result based on the verification score, as shown in
Figure 3.
If the test result is unreliable (the verification
score of the test result is less than the threshold ),
then we do not change the tracking result of the
tracker; and the algorithm reduce the verification
interval V, and enlarge the size of the local area to
search for the target, repeat the above process until
the detection To a reliable result. Then restore the
verification interval and the size of the search area.
Return the results from the validator to the tracker T
and continue tracking down from the revised target
new location. In order to effectively reduce the
calculator calculation time, the algorithm chooses to
verify every ten frames.
For our paper, the verification interval V is
initially set to 10; the verification and detection
thresholds are set to 1.0 and 1.6 respectively.
The parameter β is initialized to 1.5 and can be
adaptively adjusted based on the detection result.
Figure 3: Tracking-Verification.
3 EXPERIMENTAL
VERIFICATION AND RESULTS
ANALYSIS
3.1 Experimental Configuration
In order to evaluate the tracking performance and
efficiency of the proposed algorithm, the
experimental results in this paper are based on the
Core i7, 3.6GHz CPU, Win10 system, through the
Matlab R2016a software testing OTB13 dataset
Obtained using the algorithm of this paper. The test
dataset contains attributes such as lighting changes,
occlusion, fast movement, scale changes, motion
blur, and in-plane rotation. In the experiment, this
paper selects 10 algorithms to compare the result
(DAT, DCF_CA, DSST, SAMF, MEEM, KCF, LCT,
Staple, STAPLE_CA and Our), and then “ Our ”
represents the algorithm that we proposed.
3.2 Quantitative Analysis
Quantitative analysis is a commonly used standard
for measuring algorithm tracking results. This
section uses the average center position error (CLE)
and overlap rate (OR) to evaluate the performance of
the algorithm. CLE is the Euclidean distance
between the target's true center position and the
center position calibrated by the tracking algorithm.
The overlap ratio of the tracking is the ratio of the
area where the tracking succeeds to the real
bounding box:
Score =
𝐴𝑟𝑒𝑎(𝐵
𝑇
∩ 𝐵
𝐺
)
Area(𝐵
𝑇
∪ 𝐵
𝐺
)
Where B
T
represents the tracking target frame of
each frame, and B
G
represents the real bounding box
of the corresponding frame.
Table 1 and Table 2 show the comparison results
of the center position average error and the average
value of the tracking bounding box overlap rate of
the tracking results of different algorithms in each
video sequence, respectively.
Table 1: Center position average error.
}{
1
c
i
N
i
Ni
iobj
c
c
cx
i
,...,2,1,
),(maxarg
^
2
1
2
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
62
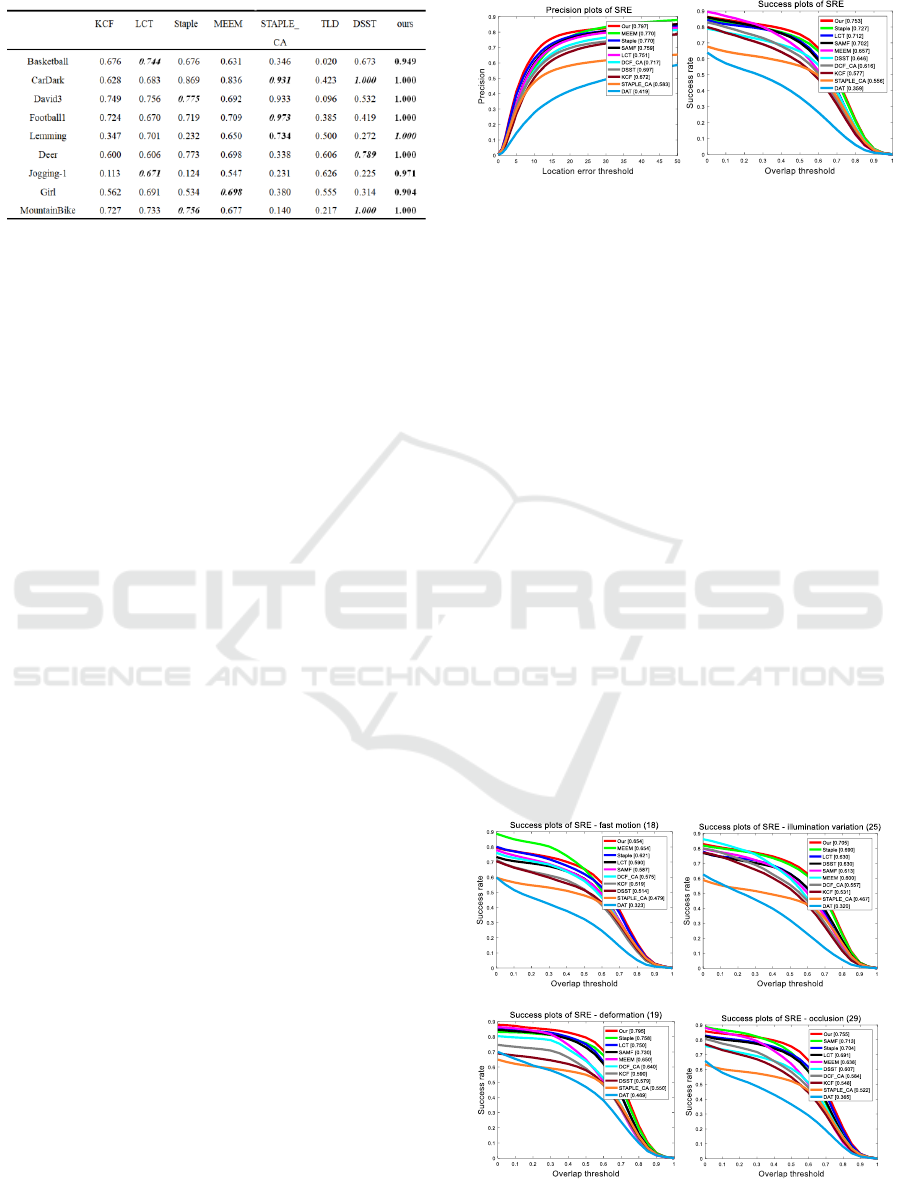
Table 2: Average value of bounding box overlap.
Note: The best and second best results are marked in
bold and black italics, respectively
In general, the smaller the average error and the
larger the overlap rate, the more accurate the
tracking result. According to the results of the
average position error of the center position in Table
1 and the average value of the overlap rate of the
bounding box in Table 2, the average error of the
center position of the target and the tracking frame
overlap in the tracking process of the algorithm in
this paper. The rate performance is better than the
benchmark algorithm STAPLE_CA, especially in
the case of the rotation of the target plane, the partial
occlusion of the target, and the disorder of the target
background, the robustness is improved.
3.3 Qualitative Analysis
This paper uses the OTB13 evaluation benchmark to
perform three experiments on 51 video sequences:
One-pass Evaluation (OPE), Temporal Robustness
Evaluation (TRE), and Spatial Robustness
Evaluation (SRE) Experiments. All these evaluation
indicators represent the performance of the tracker in
the form of an accuracy map and a success rate
diagram, which means that the tracker can
successfully track the percentage of the total number
of frames in the video at different thresholds.
By testing 51 video sequences, the experimental
results of the accuracy score map (a) and the success
score graph (b) of the obtained SRE are shown in
Fig. 4. From the experimental results in Fig. 4, the
legend illustrates the ranking scores for each tracker,
and our algorithm ranks first on the top. From the
legend can be analyzed that the performance of the
proposed algorithm is improved compared with the
other nine different types of algorithms. Compared
with the benchmark algorithm STAPLE_CA,
although the tracking speed is about half of the
benchmark algorithm, the average accuracy score
and the average AUC score performance are
improved by more than 10%.
(a) accuracy score map (b) success score map
Figure 4: OTB13 video sequence algorithm evaluation
results. The legend illustrates the ranking scores for each
tracker, and our algorithm ranks first on the top(in SRE
Evaluation Experiments).
The 51 video sequences provided in OTB13
contain 11 attributes: illumination changes,
occlusion, fast motion, scale changes, motion blur,
and in-plane rotation. Fig 5(a)-(e) represent test
results for partial attribute success rates of a video
sequence.
Through the analysis of the OTB13 video
sequence success rate evaluation graph of Fig. 5, it
can be obtained that the algorithm which calculates
the channel reliability for each feature channel in the
input correlation filter, and adds the deep learning
dual input Siamese network to the correlation filter,
has attributes ranked first in condition of fast motion,
deformation, illumination variation, occlusion, out
of plane rotation. So compared with other algorithms,
the algorithm has certain advantages, and the
performance has been improved to some extent.
Especially in the condition of tracking target fast
movement, illumination change, target deformation,
occlusion, and out-of-plane rotation, the algorithm is
more advantageous.
(a)fast motion (b)illumination variation
(c)deformation (d)occlusion
Tracking Verification Algorithm Based on Channel Reliability
63

(e)out of plane rotation
Figure 5: OTB13 video sequence success rate evaluation.
The success plots of ten challenging attributes. The legend
illustrates the ranking scores for each tracker. Our
algorithm has attributes ranked first in condition of fast
motion, deformation, illumination variation, occlusion, out
of plane rotation.
4 CONCLUSIONS
In this paper, the channel reliability method is used
to calculate the reliability weight of each feature
channel and weighted to make the target location
more accurate. The depth-learned dual-input
Siamese network is used to verify and re-search the
results of the correlation filter.
Through the evaluation benchmark analysis of
OTB video sequences, the experimental results show
that the algorithm has a certain degree of
performance for fast motion, illumination change,
target deformation, occlusion, and target rotation
outside the plane.
ACKNOWLEDGEMENTS
This research and Algorithm implementation in this
paper is supported by the 2018 Aviation Funds of
China.
REFERENCES
A. W. Smeulders., D. M. Chu., R. Cucchiara., S.
Calderara., A. Dehghan., and M. Shah., 2014. The
Journal. IEEE TPAMI. Visual tracking: An
experimental survey.
S. Hare., S. Golodetz., A. Saffari., V. Vineet., M.-M.
Cheng., S. L. Hicks., and P. H. Torr., 2016. The
Journal. IEEE TPAMI. Struck: Structured output
tracking with kernels.
H. Fan and J. Xiang., 2017. The Journal. IEEE TCSVT.
Robust visual tracking with multitask joint dictionary
learning.
H. Fan and H. Ling., 2017. The conference. CVPRW.
SANet: Structure-aware network for visual tracking.
C. Ma., J. B. Huang., X. Yang., and M.H. Yang., 2015.
The conference. ICCV. Hierarchical convolutional
features for visual tracking.
H. Nam and B. Han., 2016. The conference. CVPR.
Learning multi-domain convolutional neural networks
for visual tracking.
D. S. Bolme., J. R. Beveridge., B. Draper., Y. M. Lui.,
2010. The conference. IEEE Conference on Computer
Vision and Pattern Recognition, CVPR. Visual object
tracking using adaptive correlation filters.
L. Bertinetto., J. Valmadre., S. Golodetz., O. Miksik., and
P. H. S. Torr., 2016. The conference. The IEEE
Conference on Computer Vision and Pattern
Recognition. Staple: Complementary learners for real-
time tracking.
T. Zhang. A. Bibi. and B. Ghanem., 2016. The conference.
CVPR. In defense of sparse tracking: Circulant sparse
tracker.
M. Danelljan., G. Hager., F. Shahbaz Khan., and M.
Felsberg., 2015. The conference. IEEE International
Conference on Computer Vision. Learning spatially
regularized correlation filters for visual tracking.
Matthias Mueller, Neil Smith, Bernard Ghanem., 2017.
The conference. CVPR. Context-Aware Correlation
Filter Tracking.
C. Ma, X. Yang, C. Zhang, and M.H. Yang., 2015. The
conference. CVPR. Long-term correlation tracking.
D. Comaniciu, V. Ramesh, and P. Meer. 2000. The
conference. CVPR. Real-time tracking of non-rigid
objects using mean shift.
F. Perronnin, J. Sanchez., and T. Mensink., 2010. The
conference. ECCV. Mensink. Improving the fisher
kernel for large-scale image classification.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
64
