
3D Bounding Box Generative Adversarial Nets
Ping Kuang
1
and Haoshuang Wang
1
1
University Of Electronic Science And Technology Of China,Chengdu,China
Keywords: Generative Adversarial Networks, Deep Learning, 3D-GAN.
Abstract: Recently, Generative Adversarial Networks (GANs) gradually applied to the generation of 3D objects and
has achieved remarkable success, but at the same time, it also faces some problems, such as the training
instability, low-quality samples and mode collapse. We propose a novel framework, namely 3D Bounding
Box Generative Adversarial Network (3D-BBGAN), which can reduce the probability space of generation
by adding conditional information. According this way, we can get 3D objects with more detailed
geometries.
1 INTRODUCTION
The Generative Adversarial Network (GAN)
(Goodfellow, 2014) have achieved a great success in
generation of pictures. The some flaws in GAN’s
initial stage are generally remedied by the variations
of GAN. To solve the out-sync problem of generator
and discriminator network, (Arjovsky, 2017)
proposes Wasserstein GAN (WGAN) of clipping the
weights of the critic to restrict within a fixed interval
[-c, c]. Furthermore, (Gulrajani, 2017) provide the
WGAN with gradient penalty (WGAN-GP) to avoid
the possible pathological behavior of WGAN.
Otherwise, the initial GAN have no any prior
information, which leads that we couldn’t constrain
the generated results. The Conditional Generative
Adversarial Net (CGAN) (Mirza, 2014) creatively
adds the prior information into network by adding
conditions to both the generator and discriminator
network.
Recently, the appearance of 3D-GAN (Wu, 2016)
indicates that GAN begins to apply to the generation
of 3D objects. Compared with the 2D field, the
feature information of high-dimensional object is
more complex. It is easy to fall into the curse of
dimensionality. And it is a bit challenging for the
network structure and hardware performance to
learn more accurately the characteristic information
of high-dimensional objects. At present, the
accuracy of improving the 3D model is mainly to
improve the complexity of network architecture and
reduce the distribution space of 3D objects. (Smith,
2017) (3D-IWGAN) reduces the data space of the
original 3D-GAN from 64*64*64 to 32*32*32, at
the same time introduce into the WGAN-GP to
improve the stability of training.
Base on the methods known as 3D-IWGAN and
CGAN, here we propose a new idea to capture these
wider and more complicated distributions, which
attempt to introduce the prior information into the
network architecture. Unlike the CGAN directly
feeding same extra information into the both the
discriminator and generator as additional input layer,
while feeding the generator network the bounding
box information of 3D samples which can be
represented as double three-dimensional coordinates,
we are also feeding the discriminator the mask
information corresponding to bounding box. We call
our resulting shape model the 3D Bounding Box
Generative Adversarial Network (3DBBGAN).
We can demonstrate that our 3D-BBGAN have
following advantages:
– Compared with 3D-IWGAN, we can get a
more stable and faster procedure of convergence
testing on ModelNet10 Dataset (Wu, 2015)
– By adjusting the input coordinate information,
we can guide the size of generated object to some
extent.
Kuang, P. and Wang, H.
3D Bounding Box Generative Adversarial Nets.
DOI: 10.5220/0008096801170121
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 117-121
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
117
2 RELATED WORKS
2.1 Modelling and Synthesizing 3D
Shapes
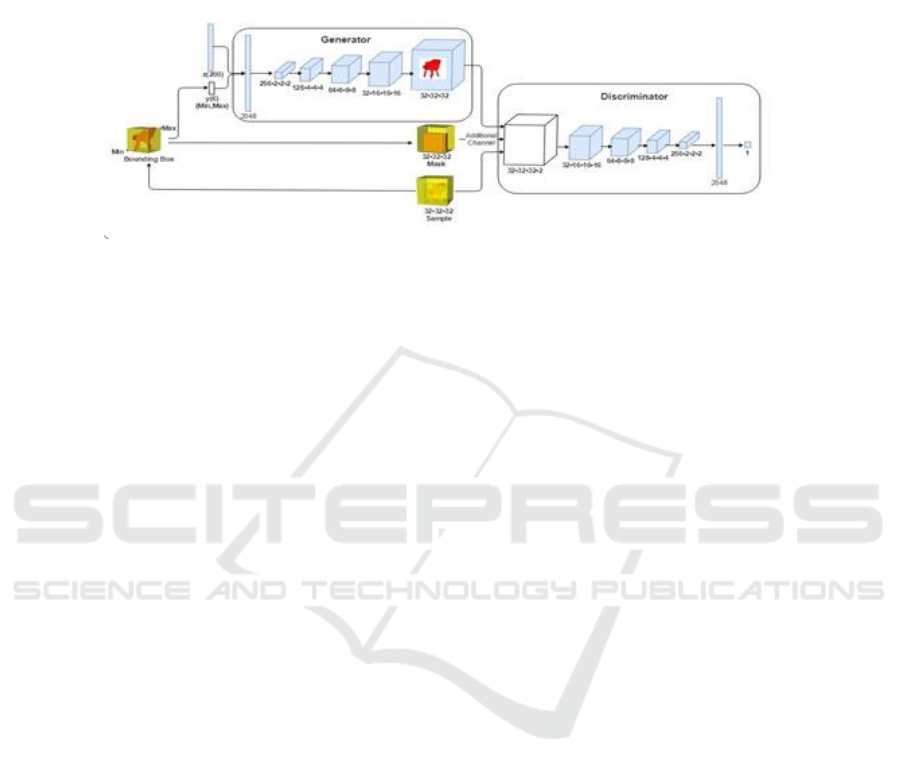
Figure 1: The architecture of 3D-BBGAN.
The generation and synthesizing of 3D object
models is a hot spot in computer graphics and vision
community. In the past few decades, the method of
3D object modeling and synthesis mainly realized by
the combination of primitives or simpler geometric
shapes, which exist in CAD model libraries
(Wu,2015),(Chang,2015), there is a lot of the
relevant literature (Tangelder,2004),
(Chaudhuri,2011),(Carison,1982) or through the way
of point cloud reconstruction(Alexa,2003) The
synthesized objects using these methods look
realistic, but it is time-consuming and high-cost. As
3D-GAN (Wu, 2016) is applied to the reconstruction
and generation of 3D objects, some researchers have
realized the potential of GAN in 3D filed. 3D-
IWGAN combines the 3D-GAN and WGAN-GP to
improve the stability of training and the effect of
synthesized object, (Wang,2017) named as 3d-ED-
GAN combines a 3D Encoder-Decoder GAN and a
Long-term Recurrent Convolutional Network
(Donahue,2015)(LRCN) to construction from
broken models result in complete and high-
resolution 3D objects, and (Yang,2017) proposes
3D-RecGAN approach to realize the construction
from a single 2.5D depth view in a complete 3D
objects. Get inspiration from CGAN, our 3D-
BBGAN introduces the prior knowledge into the
3D-GAN. We will testify that our model could
improve the efficiency of training.
3 PROPOSED MODELS
In this section we introduce our 3D-BBGAN
architecture for 3D objection generation. We first
get an introduction toward CGAN and WGAN-GP.
Then we display our model and explain how we
achieve control over the generated objects.
3.1 Conditional Adversarial Nets(CGAN)
Based the (Goodfellow, 2014) CGAN creatively
attempt to condition both the generator and
discriminator through same extra information y. The
information may be meaningless to humans, but the
generator and discriminator will learn automatically
the meaning of y. To generate verisimilar results, the
generator will build a mapping function from real
samples, at the same time the discriminator try to
distinguish the fake results, as if they are playing the
two-player min-max game with value function V (G,
D):
(1)
The generator model G wants to captures the
data distribution, and the discriminative model D
tries to estimates the probability that a sample came
from the training data. Where z represents a prior
noise distribution.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
118

3.2 WGAN with Gradient Penalty
(WGAN-GP)
(Arjovsky, 2017) (WGAN) argues that cross
entropy is not appropriate to measure the distance
of distributions with disjoint parts. Instead, the
wassertein distance is proposed to measure the
distance between the generated data and real data
distribution, theoretically solving the problem of
the training. In order to satisfy the lipschitz
continuity that wassertein distance needs, WGAN
clips the weights of the critic to lie within a fixed
interval
Figure 2: Objects generated by the 3D-BBGAN system trained on the ModelNet10 chair class in 12 orientations. Each row
of images come from a same generated object.
[c,c]. Determining the size of c is a tricky business.
If too large, it may cause gradient explosion. On the
contrary, it may cause gradient to
disappear.(Gulrajani,2017) proposes a more
appropriate method to enforcing the Lipschitz
constraint. It directly constrains the gradient norm of
the critic’s output with respect to its input to realize
a soft version of constraint with a penalty on the
gradient norm for random samples
, where
randomly sampled from generator Pg and real data
distribution Pr. This results in the following loss
function:
(2)
3.3 Our 3D Bounding Box Generative
Adversarial Net (3D-BBGAN)
Inspired by (Mirza, 2014), our 3D-BBGAN
architecture introduces the prior information into
original network architecture of 3D-IWGAN (Smith,
2017). As shown in 1, every real input is a
32×32×32 voxel space, but the sample could be
encircled at a more small area called Bounding Box.
The Bounding Box could be represented by double
coordinates (Min, Max) in a 3D space, which is
inputted into the generator G as additional
information y. Meanwhile, the every Bounding Box
corresponds to a single Mask, inside of the
Bounding Box are 1.0 and outside are 0.0, which is
fed into the discriminator D as additional input layer.
As for network structure, the generator G maps a
206-dimensional latent vector (z, y), randomly
sampled from a probability latent space, to a
32×32×32 cube, representing an object in 3D voxel
space. The discriminator D is fed the samples and
the corresponding mask information, outputing a
confidence value of whether an object model is real
or generated.
Following (Gulrajani, 2017), the loss function is
as follows:
(3)
where the Mask maps y. The
is the mixed
distribution of mixing randomly interpolation of
generator distribution
and data distribution
.
4 EXPERIMENT
In this section, we evaluate our framework on
ModelNet10 Dataset (Wu, 2015). We first list 3D-
GAN, 3D-IWGAN and our generated results
separately. Then we introduce our training details.
Finally we show the frame how to control the size of
generate object.
4.1 3D Object Generation
For this experiment, we first train our 3D-BBGAN
for the highest complexity of chair and table class of
ModelNET10 dataset. Then on the all classes of
ModlNET10. We trained all experiments on 1080Ti
GPU. For generation, we get generated object from
the last tanh activation function of generator network,
3D Bounding Box Generative Adversarial Nets
119
and render the voxel of which the value exceed the
threshold 0.3.
Figure2 are generated by chair class of
ModelNet10, which shows that our 3DBBGAN
system has ability to generalize the object model of
high quality from the complex sample space. Figure
3 shows separately the generated samples of
3DGAN,3D-IWGAN and our 3D-BBGAN. These
samples are uniformly sampled and selected intact
results. The source code we tested was from the
github provided by (Gulrajani, 2017). Figure 4 are
generated by training on the entire class of
ModelNet10 dataset, which has bathtub, chair, bed,
desk, dresser, monitor, table, toilet, nightstand and
sofa class. Because our mask information
successfully limited
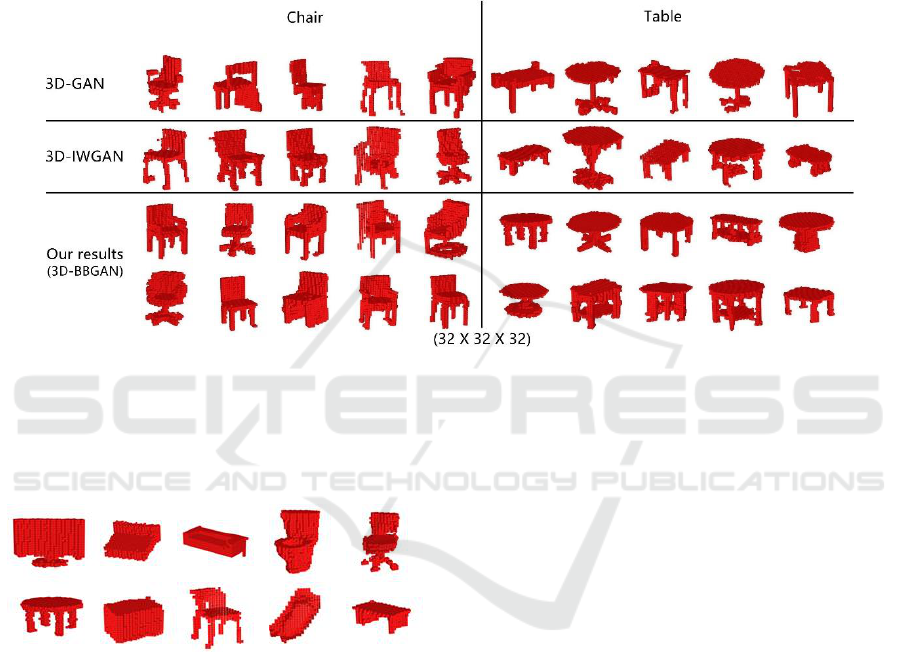
Figure 3: Objects generated by the 3D-GAN ,3D-IWGAN and our 3D-BBGAN models, trained separately on the single
chair or table class of ModelNet10 dataset. For comparison, the results are uniformly sampled to represent the
generalization ability of the model as much as possible.
the space of data distribution, the model
convergence speed was obviously improved.
Figure 4: Objects generated by our 3D-BBGAN model,
trained on the all ModelNet10 dataset. Each shape above
is derived from a different class as order: monitor, bed,
sofa, toilet, chair, table, dresser, nightstand, bathtub, desk.
The orientations have been altered for optimal viewing.
During the experiment, we found that the 3D-
GAN have come across the problem of mode
collapse. It’s generated types are more less than
others and always incomplete.
While comparing the synthesized objects of 3D-
IWGAN and 3D-BBGAN generated by same latent
vector z, our results can get more detailed
geometries and more complete styles. But we have
to admitted that there is no effective quantifiable
indicators to measure the effect of synthesized
objects.
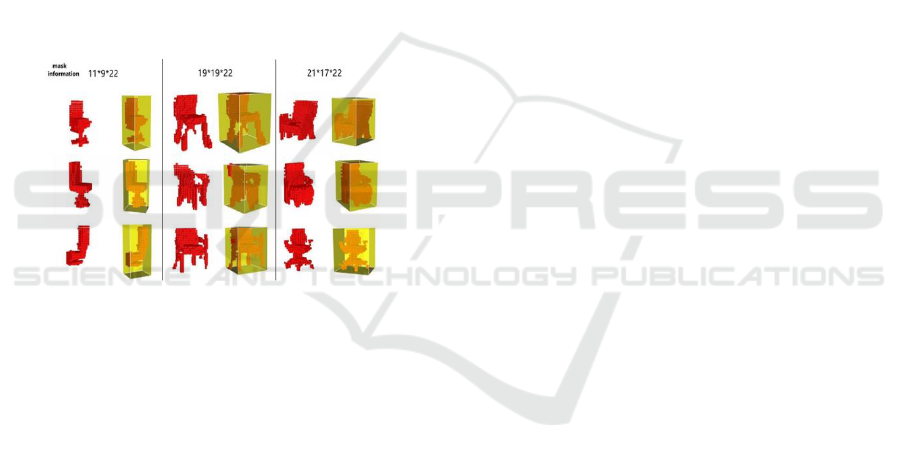
4.2 Mask Information
Here we will show the effect of our model
controlling the size of 3D object. We provide the
generator with the length information of three sides
of the bounding box to guiding the generation of 3D
object. The length information can be converted into
two coordinates. As Figure 5 shows, the 3D object
will be generated in the corresponding bounding box.
In fact, the specific generation effect of 3D object is
not always good. According our research, the
generation effect under bounding box.
Training samples should contain as many 3D
object models of various sizes as possible.
– While the mask information provided exist in the
training samples, the generated effect tends to be
better.
– Under extreme conditions like very short side
length, the mask information will lose its guiding
effect.
In a word, our 3D-BBGAN model has ability to
guide the size of the generate object by limiting the
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
120
generated area of the object through two three-
dimensional coordinates information.
5 CONCLUSIONS
In this work, we proposed 3D-BBGAN for 3D
object generation. We demonstrated that our models
are able to generate novel 3D objects with more
detailed geometries. Through the addition of the
conditional information to the generator and the
discriminator in the training process, we have
realized the effective limitation of the probability
space of the generated object. We effectively limit
the probability space of generation object to shorten
the training time and improve the generation effect
of 3D objects. And by adjusting the information we
add to the generator, we can direct the size of the
generated object. Next, we will try to add the
appropriate conditional information to guide the type
of the generated object.
Figure 5: Objects generated by the 3D-BBGAN system
trained on the ModelNet10 chair class. Here we list the
generate results of the three bounding box information.
The graph on the left of each column represents the
generated 3D Object, the right of each column shows the
render result with the correspond bounding box
information.
ACKNOWLEDGEMENTS
This work is supported by Sichuan Science and
Technology Program (2015GZ0358, 2016GFW0077,
2016GFW0116, 2018GZ0889) and Chengdu
Science and Technology Program (2018-YF05-
01138-GX).
REFERENCES
Alexa, M., Behr, J., Cohen-Or, D., Fleishman, S., Levin,
D., Silva, C.T.: Computing andrendering point set
surfaces. IEEE Transactions on visualization and
computer graphics 9(1), 3–15 (2003).
Arjovsky, M., Chintala, S., Bottou, L.: Wasserstein gan.
arXiv preprint arXiv:1701.07875 (2017).
Carlson, W.E.: An algorithm and data structure for 3d
object synthesis using surface patchintersections.
ACM SIGGRAPH Computer Graphics 16(3), 255–
263 (1982).
Chang, A.X., Funkhouser, T., Guibas, L., Hanrahan, P.,
Huang, Q., Li, Z., Savarese, S.,Savva, M., Song, S., Su,
H., et al.: Shapenet: An information-rich 3d model
repository. arXiv preprint arXiv:1512.03012 (2015).
Chaudhuri, S., Kalogerakis, E., Guibas, L., Koltun, V.:
Probabilistic reasoning for assemblybased 3d
modeling. In: ACM Transactions on Graphics (TOG).
vol. 30, p. 35. ACM (2011).
Donahue, J., Anne Hendricks, L., Guadarrama, S.,
Rohrbach, M., Venugopalan, S., Saenko,K., Darrell, T.:
Long-term recurrent convolutional networks for visual
recognition and description. In: Proceedings of the
IEEE conference on computer vision and pattern
recognition. pp. 2625–2634 (2015).
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville,A., Bengio, Y.:
Generative adversarial nets. In: Advances in neural
information processing systems. pp. 2672–2680 (2014)
Gulrajani, I., Ahmed, F., Arjovsky, M., Dumoulin, V.,
Courville, A.C.: Improved training ofwasserstein gans.
In: Advances in Neural Information Processing
Systems. pp. 5769–5779 (2017).
Mirza, M., Osindero, S.: Conditional generative
adversarial nets. arXiv preprint arXiv:1411.1784
(2014).
Smith, E., Meger, D.: Improved adversarial systems for 3d
object generation and reconstruction. arXiv preprint
arXiv:1707.09557 (2017).
Tangelder, J.W., Veltkamp, R.C.: A survey of content
based 3d shape retrieval methods. In:Shape Modeling
Applications, 2004. Proceedings. pp. 145–156. IEEE
(2004).
Wang, W., Huang, Q., You, S., Yang, C., Neumann, U.:
Shape inpainting using 3d generativeadversarial
network and recurrent convolutional networks. arXiv
preprint arXiv:1711.06375 (2017).
Wu, J., Zhang, C., Xue, T., Freeman, B., Tenenbaum, J.:
Learning a probabilistic latent spaceof object shapes
via 3d generative-adversarial modeling. In: Advances
in Neural Information Processing Systems. pp. 82–90
(2016).
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
Xiao, J.: 3d shapenets: A deeprepresentation for
volumetric shapes. In: Proceedings of the IEEE
conference on computer vision and pattern recognition.
pp. 1912–1920 (2015).
Yang, B., Wen, H., Wang, S., Clark, R., Markham, A.,
Trigoni, N.: 3d object reconstructionfrom a single
depth view with adversarial learning. arXiv preprint
arXiv:1708.07969 (2017).
3D Bounding Box Generative Adversarial Nets
121
