
Research on UAV Image Classification Based on Deep Learning
Runqi Li
1
, Cen Chen
1
and Mengyao Chen
1
1
Institute of Information, Beijing University of Technology, No100 Pingleyuan, Chaoyang District, Beijing, China
{ lirunqi,cenchen,chenmengyao }@ emails.bjut.edu.cn
Keywords: Deep learning, UAV, Regional classification, Image segmentation.
Abstract: In order to improve the efficiency of urban traffic operation, this paper combines deep learning technology
and UAV photography of drones. With the algorithm in this paper, we can classify traffic area and static
area in high quality and speed. We make a test in Fengtai District of Beijing to conduct regional traffic
identification research on the traffic content of the area. The primary identification area includes the vehicle
travel area and coordinates the pedestrian area in a coordinated manner. The main research result of this
algorithm is to propose a key frame extraction scheme for UAV image and then combine it with the
application of Mask R-CNN in high-altitude image to identify the ground area. The experimental results are
similar to the same algorithm (refer to FCNs for this article). Comparative benchmarks) have obvious
advantages of high speed and high accuracy, which are of great help to traffic safety and urban planning.
1 INTRODUCTION
With the development of science and technology,
basic urban map construction has been realized by
means of satellite remote sensing technology, but the
details are still in short supply. The emergence of
UAV is undoubtedly a new help for the construction
of urban maps. Wide range of applications, such as
public transportation, news media, aerial
photography, agricultural monitoring, etc (Deren,
2014) (W., 2013). With a UAV in a place where
people can't reach it, it's easy to get real-time picture
information at the best angle. The collected real-time
image information plus the deep learning method is
trained to determine the category of the circled area,
thereby implementing classification. At present,
there have been studies on regional classification
and identification of environmental pollution areas
(Qiong W, 2018), and also there are research about
regional terrain classifications (L., 2018), but
research on traffic with UAV is still the current
pattern recognition and the poor areas of the drone
field.
Deep learning is one of the important advances
in the development of artificial intelligence, and
research in its field has already landed in a wide
range of industrial fields (Chen Y, 2017), one of the
most used ones is to do image classification.
Girshick (R., 2015) has made success in
combination of convolutional neural networks and
regional algorithms heralds the beginning of a high-
speed, high-precision recognition era. Combining
the high-speed and accurate recognition and
classification technology of UAV's efficient image
capture and deep learning, it can be of vital help to
the construction of urban maps. The use of targeted
algorithms and architecture can also be very accurate.
Guarantee.
The main focus of the UAV detection traffic area
is the frame selection of the UAV image and the
identification of the area. The main methods of
frame fetching are the key frame coding frame
method and the feature pixel frame method
(Narasimha R ., 2003). In view of the continuity of
UAV images, this paper adopts the method of taking
frames by feature pixels to avoid the repetitive effect
of multiple repeated frames on the detection
algorithm. In terms of region identification, this
paper adopts Mask-RCNN-based image instance
segmentation algorithm (Kaiming, 2018) and adds
the integrated structure to the whole region. The
final output effect is the regional frame selection.
2 RELATED WORK
The current image segmentation application
algorithms mainly include supervised segmentation
and unsupervised segmentation. The segmentation
algorithm in classification based on classification
can be divided into pixel-level segmentation and
superpixel-based segmentation algorithm.
148
Li, R., Chen, C. and Chen, M.
Research on UAV Image Classification Based on Deep Learning.
DOI: 10.5220/0008098701480152
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 148-152
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Unsupervised segmentation algorithm (Moore, 2008)
such as Moorer et al. proposed a superpixel lattice
over segmentation method based on greedy
algorithm (Shi J, 2000).
2.1 Segmentation Algorithm Based on
Superpixel
The concept of superpixel is proposed by Xiaofeng
Ren (Shi J, 2000). It is used to describe the pixels of
adjacent features to produce "pixel clusters", and
then the local clustering of images is classified,
which has the advantage of fast operation. However,
due to lack of specificity, under-segmentation often
occurs result. In terms of application methods,
superpixel segmentation mainly includes image
segmentation based on graph theory and a method
based on statistical classifier, such as Normalized-
cuts (Y, 2000)、Graph-cuts (Long, 2014)、Entropy
rate superpixel segmentation (Liu M Y, 2010).
2.2 Segmentation algorithm based on
Deep Learning
In order to solve the problem of segmentation
accuracy, the segmentation algorithm begins to
focus on extracting image depth features and using
the maximum inter-class idea to segment each pixel
region (Kaiming, 2018), and uses gradient
ascending iteration to update the classification
function weights to achieve the optimal solution.
The full convolution image segmentation algorithm
proposed by Long et al. is the best embodiment for
pixel-level segmentation. Later, a large number of
improved algorithms have been generated, and w-net
(Xia, 2017), u-net (Von Eicken, 1995), and other
excellent segmentation algorithms have been
evolved until the mask. The advent of Mask-Rcnn
has pushed the field of image segmentation research
to the forefront of machine vision research.
3 UAV IMAGE ANALYSIS AND
PRINCIPLE
In order to identify and identify the image area in a
targeted manner, it is first necessary to use image
preprocessing and filter feature repetition data for
images acquired by the drone. Since the UAV image
is a dynamic video format, this paper analyzes the
key frame method (Agarwala, 2004), and selects the
image with the feature as the data set by combining
the image enhancement technology of the key frame
image with the big data information analysis method.
We choose to select key frames at the first beginning.
With the progress of key frames, we can finish other
jobs. At present, many techniques for extracting key
frames are based on video coding, but this method
does not help the aerial image extraction information.
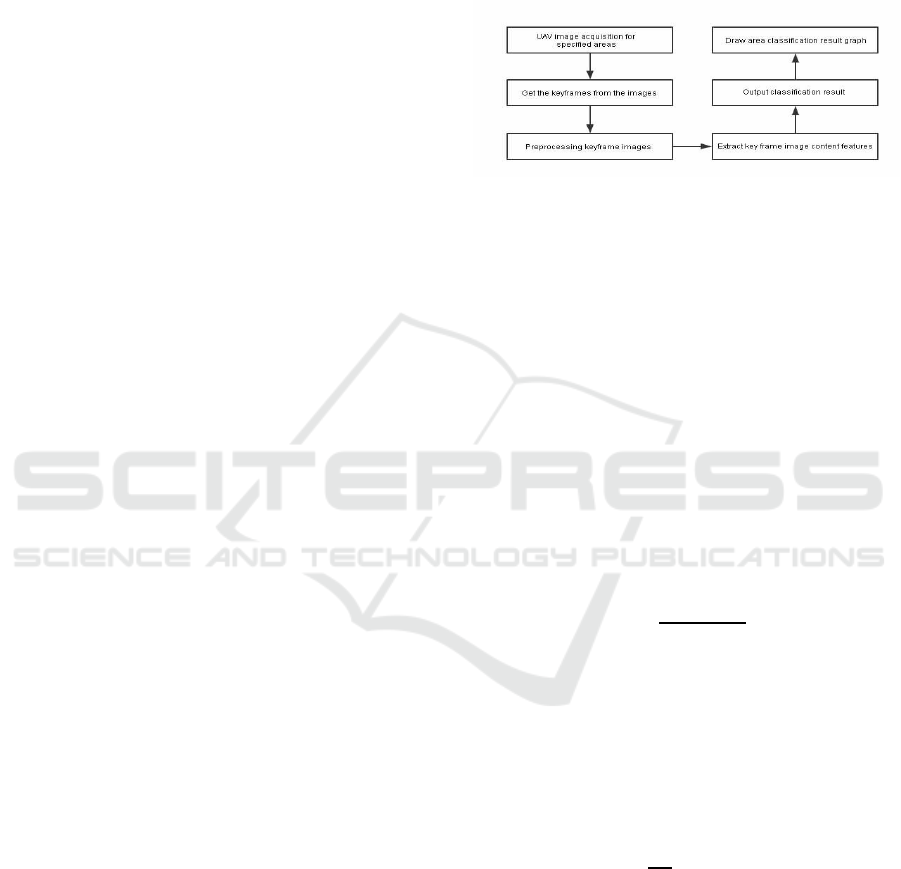
Figure 1: UAV aerial area segmentation design block
diagram.
3.1 Principle of Regional Feature
Judgment
Since the ground shot at high altitude belongs to the
static region, the key frame extraction method
adopted in this paper is extracted according to the
difference of the feature features. We first extract the
I frame in the video coding according to the method
of encoding the key frame, and gather the I frame.
The eigenvalues are calculated and the eigenvalues
are calculated from the constructed system of
characteristic equations. This equation describes the
eigenvalues by calculating pixel anomalies. The
characteristic formulas are as follows:
(1)
(2)
Where
is the value of the ith image converted
to the square matrix determinant,
is the key frame
roughness degree, calculated by the resolution (w*h)
and the pixel variance (σ), and the calculation
formula is as follows:
(3)
We will calculate the result g(x) according to the
order from the largest to the smallest, and select the
first 50 frames of each sequence for the next study.
The results of these 50 frames are our key frames.
Research on UAV Image Classification Based on Deep Learning
149

3.2 Key Frame Image Pre-processing
In order to deal with the residual factor of the image
determined by the feature region, this paper adopts
the wavelet threshold demonising based on the
wavelet domain, and calculates the hard threshold to
eliminate the influence of the noise interference on
the image depth information extraction. The wavelet
minimax threshold is as Equation 4:
(4)
Where N is the signal length and is obtained by
image frequency domain transformation. The
number0.3936 and number 0.1829 is Sqtwolog
threshold coefficient
After the hard threshold is obtained, the noise is
demonised by the wavelet hard threshold method.
The calculation formula is as follows:
(5)
4 TRAFFIC DETECTION BASED
ON MASK-RCNN
Image segmentation marks and locates objects and
backgrounds in an image according to features such
as grayscale, color, texture, and shape, and uses
these features to show similarity in the same region
(Zhang, 2015).
4.1 RPN
The RPN network is a full convolution structure
inside the mask-rcnn. It can use the sliding window
to obtain the candidate region. Compared with the
previous Faster R-CNN network, the RPN of the
Mask R-CNN uses the bilinear interpolation method
for the receptive field. To restore, the experience
field here is the default 9 serial ports, corresponding
to three areas of 128, 256, 512, the window ratio is
1:1, 1:2, 2:1.
According to the characteristics collected by
different windows, the RPN uses the classification
layer to calculate the coincidence rate between the
target and the window. By setting the threshold
(default is 0.7) to judge the difference between the
calculated value and the true value, the positioning is
completed.
4.2 Output Layer Regression
Mask R-CNN has two output layers, which are the
result of detecting coordinates and the score of the
detected object category. The difference between the
two calculated results and the true value is brought
into the loss function to make a gradient drop to
obtain the optimal solution. The loss function is
shown in Equation (6)-(9):
(6)
(7)
(8)
(9)
Where L
cls
is used to calculate the classification
probability loss, which is a softmax loss function;
L
loc
is the coordinate loss function of the detection
frame, where v
x
,v
y
,v
w
,v
h
are the actual measured
values, respectively, and t
x
,t
y
,t
w
,t
h
are the predicted
coordinates value.
4.3 Mask R-CNN Experimental
Analysis
The image data collected by the drone is separated
by key frames to obtain a series of key feature
images, and then the data is pre-processed to
perform image enhancement operations. The key
frames of 2000 sample images are comprehensively
selected to determine the traffic condition
classification. For the pedestrian area, there is a
detection of the direction of pedestrian movement.
The tensorflow framework is used steadily, the
VGG16 model is selected with the training model,
the training results of VGG16 on ImageNet are used
for the pre-training parameters, and the RPN
network and the classification network are used for
simultaneous training. Under the NVIDIA GTX960
GPU acceleration, the actual detection model is
trained and tested. At the same time, the sliding
window is also used to intercept the scene image
into the Mask R-CNN network for area recognition
by the 600*600 area selection window, and finally
the results generated by the multiple windows are
merged into one picture. The final detection and
recognition results are obtained by the method of
maximum likelihood estimation. The above process
is shown in Figure 2, and final result is shown in
Figure 3.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
150

Figure 2: Key frame instance segmentation process
Figure 3: Output result
We classify the results into multiple continuous
traffic areas, each of which is an entire category.
We compare our method and simply use the
traditional method of instance segmentation and
semantic segmentation as Table 1 and Table 2.
Table 1: Comparison between pixels.
Method
Pixel acc.
f.w. IU
FCNS
60.3
49.5
MASK-RCNN
75.6
48.0
Table 2: Comparison between average coefficients.
Method
Mean acc.
Mean IU
FCNS
42.2
34.0
MASK-RCNN
60.9
36.0
The test video is based on 1080p and when we
choose 720p to test the work, the results is lower
than 1080p and the result is shown in table 3.
Table 3: Comparison between 1080p & 720p in Mask-
RCNN.
Resolution
Mean acc.
Mean IU
720p
57.9
33.0
1080p
60.9
36.0
5 CONCLUSIONS
In this paper, we have used the video stream
keyframe extraction technique and the instance
segmentation algorithm to identify the traffic area.
The application of the work can be used in making
traffic map and real-time traffic monitoring. The
comparison from the pixel level is completely higher
than the traditional semantic segmentation, and there
are key frame extraction techniques. The support is
reduced by nearly 2000 times the detection range per
frame. From the comparison of the results of pixel
mean, the robustness of the proposed algorithm can
be reflected. Combining the above analysis, the
algorithm proposed in this paper combined with the
high-altitude shooting and pattern recognition of
UAV is feasible and with accuracy.
REFERENCES
Deren, L. I., & Ming, L. I. (2014). Research advance and
application prospect of unmanned aerial vehicle
remote sensing system. Geomatics & Information
Science of Wuhan University, 39(5), 505-513.
Ziyan W. (2013). Based on the UAV Orthophotos to
analyse Land Use/Land Cover. Inner Mongolia
Normal University.
Qiong W, & Songze L.(2018). Research on Identification
Technology of UAV's Environmental Pollution Target
based on Deep Learning. Environmental Science and
Management, 43(07):91-94.
Ximei L. (2018). Using the Topographic Map for UAV
Images Classification. Journal of Surveying and
Mapping and Spatial Geographic Information,
41(11):46-48+54.
Chen Y, & Fan R. (2017). Segmentation of High-
Resolution Remote Sensing Image Combining Phase
Consistency with Watershed Transformation. Laser &
Optoelectronics Progress, 54(9):092803.
Girshick R. (2015). Fast R-CNN. IEEE International
Conference on Computer Vision.
Narasimha R ., & Savakis A E. (2003). A neural network
approach to key frame extraction.
Kaiming, H. , Georgia, G. , Piotr, D. , & Ross, G. . (2018).
Mask r-cnn. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 1-1.
Chunyao Wang , & Junzhou Chen. (2014). Review on
superpixel segmentation algorithms. Application
Research of Computers, 31(1):6-12.
Moore, A. P., Prince, S. J. D., Warrell, J., Mohammed, U.,
& Jones, G. (2008). Superpixel lattices. IEEE
Conference on Computer Vision & Pattern
Recognition.
Shi J , Malik J . Normalized cuts and image segmentation.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 2000, 22(8):888-905.
Research on UAV Image Classification Based on Deep Learning
151

Boykov Y . (2000). Interactive Organ Segmentation using
Graph Cuts. Proceedings of "MICCAI"-2000
Liu M Y , Tuzel O , & Ramalingam S. (2010). Entropy
rate superpixel segmentation. Computer Vision &
Pattern Recognition. IEEE.
Long, J. , Shelhamer, E. , & Darrell, T. . (2014). Fully
convolutional networks for semantic segmentation.
IEEE Transactions on Pattern Analysis & Machine
Intelligence, 39(4), 640-651.
Xia, X. , & Kulis, B. . (2017). W-net: a deep model for
fully unsupervised image segmentation.
Von Eicken, T. , Basu, A. , Buch, V. , & Vogels, W. .
(1995). U-Net: a user-level network interface for
parallel and distributed computing. Fifteenth Acm
Symposium on Operating Systems Principles. ACM.
Agarwala, A. , Hertzmann, A. , & Salesin, D. H. . (2004).
Keyframe-based tracking for rotoscoping and
animation. Acm Siggraph. ACM.
Yujin Zhang. (2015). A Survey on Transition Region-
Based Techniques for Image Segmentation. Journal of
Computer-Aided Design & Computer Graphics,
27(03):379-387.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
152
