
Agent-based Web Supported Simulation of Human-robot Collaboration
Andr
´
e Antakli, Torsten Spieldenner, Dmitri Rubinstein, Daniel Spieldenner,
Erik Herrmann, Janis Sprenger and Ingo Zinnikus
German Research Centre for Artificial Intelligence (DFKI), Campus D3 2, 66123 Saarbruecken, Germany
Keywords: Human Robot Collaboration, Multi-Agent Systems, Linked Data, 3D Simulation.
Abstract:
In the production industry, in recent years more and more hybrid teams of workers and robots are being used
to improve flexible processes. The production environment of the future will include hybrid teams in which
workers cooperate more tightly together with robots and virtual agents. The virtual validation of such teams
will require simulation environments in which various safety and productivity issues can be evaluated. In
this paper, we present a framework for 3D simulation of hybrid teams in production scenarios based on an
agent framework that can be used to evaluate critical properties of the planned production environment and
the dynamic assignment of tasks to team members. The framework is embedded in a web-based distributed
infrastructure that models and provides the involved components (digital human models, robots, visualization
environment) as resources. We illustrate the approach with a use case in which a human-robot team works
together in an aircraft manufacturing scenario.
1 INTRODUCTION
Human-robot collaboration (HRC) is expected to in-
crease the automation level in the manufacturing in-
dustry which has been putting considerable research
and development work into the implementation of hy-
brid teams for several years. A usual procedure in the
planning and design phase when preparing the rollout
is to simulate critical aspects of the collaboration pro-
cesses in advance. For HRC, configurations of hybrid
teams and their internal work distribution and interac-
tions have to be validated in advance in order to re-
duce costs and time in real production and to avoid
injuries as far as possible. In addition to the spe-
cific assembly planning, the establishment of hybrid
teams asks for optimal orchestration of individual ac-
tors with fundamentally different characteristics. For
these reasons, a highly configurable simulation envi-
ronment to model and validate such configurations is
needed.
3D simulations can be used to evaluate safety
conditions, provide risk assessment, show spatial
relationships and path regularities, convey time-
dependencies, but they are also intuitive for the end-
user, e.g. manufacturing planners, in terms of un-
derstanding and interaction (Mourtzis et al., 2015).
Currently tools for planning, simulation and valida-
tion of complex production processes and flows of
materials are available, but these only allow model-
ing plain action sequences of actors. When actors in a
setting have various options to react to changing cir-
cumstances (which humans are capable of), each pos-
sible behavior has to be manually specified in detail.
This becomes even more important with the increas-
ing variety of products (’batch size 1’), leading to an
enormous number of potentially diverging action se-
quences. Furthermore, these solutions look at each
actor separately, which means they do not interact di-
rectly with each other, making a simulation of collab-
orative behavior very hard or even virtually impossi-
ble. In contrast, simulated production processes in-
volving hybrid teams should be highly configurable
and the simulated actors have to be—to a certain
degree—autonomous and must interact directly with
each other. Simulating dynamic and adaptive behav-
ior of individual team members requires a paradigm
that allows to intuitively model autonomous entities
that can independently decide on how to achieve a
given goal depending on the simulation state, explor-
ing the space of possible (inter-)action sequences. If
autonomous entities are to be simulated, agent sys-
tems are usually used to model and execute their be-
havior and interactions. If independent actors are
not only to be visualized abstractly—e.g. with pre-
modeled animations to evaluate ergonomic and spa-
tial feasibility—approaches are needed that dynami-
cally synthesize diversified motions that are as close
to reality as possible, especially for the simulation of
88
Antakli, A., Spieldenner, T., Rubinstein, D., Spieldenner, D., Herrmann, E., Sprenger, J. and Zinnikus, I.
Agent-based Web Supported Simulation of Human-robot Collaboration.
DOI: 10.5220/0008163000880099
In Proceedings of the 15th International Conference on Web Information Systems and Technologies (WEBIST 2019), pages 88-99
ISBN: 978-989-758-386-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

human actors.
When answering questions regarding the feasi-
bility of a configuration, there must be guarantees
about the adequacy of the simulated robot behavior,
and, as far as possible, also for the simulated human.
Hence, there is a requirement to integrate robot con-
trol and simulation software in order to make sure that
the simulated processes represent the ’real’ behavior
of the simulated entities adequately. Most industrial
robots are endowed with their own specific robotic
software resp. their own data format, which means
that to enable data exchange between several simu-
lation subsystems, data needs to be lifted to a com-
mon representation. We propose to use a Web-based
infrastructure where components are represented as
resources. The resource-oriented infrastructure can
be utilized for integrating simulation subsystems, but
also during execution on the shop floor for informa-
tion exchange between production control, robots and
sensor/actuator systems.
In the following we present our approach to
a highly configurable simulation environment that
should support end-users, such as manufacturing
planners, to optimally prepare, evaluate and improve
collaboration of hybrid teams in production lines.
Beside of a visualization environment, in which the
end-user can flexibly manipulate the scenery objects
at run-time and validate time constraints, we use
approaches to dynamically generate human motions
based on motion capture data and to enable intuitive
modeling of agent behavior for orchestration and con-
trol of simulated hybrid teams in such a dynamic envi-
ronment. The integration of the components is based
on Web technology and standards which provide an
abstraction layer for the communication and data ex-
change between the subsystems.
This paper is structured as follows. After pointing
out the Related Work in Section 2, Section 3 shows
our framework and the interplay of the different ap-
proaches. In section 4 we introduce the AJAN agent
service and our motion synthesis system. In section 5,
a use-case scenario in the context of hybrid teams in
manufacturing is presented. Finally, we discuss open
issues in section 6 and conclude in section 7.
2 RELATED WORK
In a recent survey on HRC, (Villani et al., 2018) dis-
tinguish basic safety measures, human-robot coexis-
tence and human-robot collaboration. In coexistence,
humans and robots share a common workspace, but
have possibly independent goals. In collaboration, at
least parts of the actions of the individual team mem-
bers are coordinated towards reaching a shared goal,
such as e.g. lifting and mounting heavy parts together
in an assembly line. Fundamental for both, coex-
istence and collaboration, are in fact safety mecha-
nisms which guarantee that collisions are avoided or
as harmless as possible.
Several approaches focus on risk assessment in
HRC scenarios based on built-in safety measures
to reduce hazards. (Pedrocchi et al., 2013) and
(Gopinath and Johansen, 2016) consider HRC mainly
from the robot-oriented perspective of collision avoid-
ance. (Awad et al., 2017) presents a design method for
facilitating and automating risk assessment in HRC
scenarios. Although risk assessment is an important
aspect of HRC, especially in industrial contexts, it
is rather a prerequisite for designing adaptable HRC
workspaces. Given safety measures on the robotic
side, the question still remains which impact these
measures have on the coordination and collaboration
of workers and robots in flexible environments.
Several commercial systems allowing the con-
figuration and 3D simulation of target processes in
production environments in the shop-floor context,
e.g. Tecnomatix
1
, FlexSim
2
, visTABLEtouch
3
or
SIMUL8
4
. DELMIA
5
for example, is a tool which
allows additionally the validation of ‘produced‘ prod-
ucts and the evaluation of manufacturing processes.
DELMIA is also used in (Kashevnik et al., 2016) for
prototyping CPPS environments. (Ore et al., 2014)
present an extension of the IMMA tool for ergonomic
assessment of HRC scenarios. (Fritzsche et al., 2014)
describes EMA, a tool for ergonomic assessment of
worker behavior which has recently been extended
with robotic capabilities to simulate collaborations.
The main deficit of these industrial frameworks is the
limited support for specifying dynamical and mutual
dependencies between the actors which is required for
evaluating team-oriented behavior especially in criti-
cal situations (Tsarouchi et al., 2016).
3 SIMULATION FRAMEWORK
ARCHITECTURE
In this section, we describe the overall architecture
of the simulation framework (see Figure 1). It con-
sists of components for modeling and executing the
1
Tecnomatix: plm.automation.siemens.com/Tecnomatix
2
FlexSim: www.FlexSim.com/FlexSim
3
visTABLEtouch: www.vistable.de/visTABLEtouch-
software
4
SIMUL8: www.SIMUL8.com
5
DELMIA: www.transcat-plm.com/software/ds-software/
delmia
Agent-based Web Supported Simulation of Human-robot Collaboration
89

behavior of actors in simulated assembly scenarios
(including workers, robots, etc.) using the multi-
agent system AJAN (see Section 4.1); a component
for generating worker motions using motion captured
data, and the robot control component Robot Operat-
ing System (ROS) with an integrated simulation unit
(Gazebo). The simulation of the actors is visualized in
Unity3D
6
, a widespread game engine. The 3D scene
modeled with Unity3D also represents the real task
environment. Accordingly, it makes the virtual work-
ing tools available to the actors. The integration of
these subsystems is realized based on standard Web
technologies, enhanced with semantic features, estab-
lishing a resource-oriented architecture.
3.1 Resource Oriented Architecture
Obviously, the nature of software shown in Figure
1, their data and provided network interfaces, differ
widely, ranging from robotic operation systems, over
highly dynamic data stores, to 3D game engines for
interactive simulation and visualization. This varia-
tion calls for an integration layer to achieve structural
interoperability, if not even semantic interoperabil-
ity (Sheth, 1999) between the different components,
meaning that applications are not only using structural
compatible data layouts, but data can be mutually ex-
changed and understood between applications.
In particular in the domain of IoT, the W3C Web
of Things Working Group
7
proposes to use the Web as
convergence and integration platform. The so emerg-
ing Web of Things (WoT) (Guinard and Trifa, 2009)
defines a Web-based abstraction layer for IoT plat-
forms, protocols, data models and communication
patterns. To unleash its full potential, the emerging
WoT is expected to evolve into a Semantic Web of
Things (SWoT) (Pfisterer et al., 2011). The SWoT
will heavily rely on Linked Data principles (Heath
and Bizer, 2011) to semantically describe IoT enti-
ties in terms of their actions, properties, events and
metadata (Schubotz et al., 2017) independent of the
underlying IoT platform.
This vision extends also to server-client commu-
nication. Verborgh et al. claim that for clients to act
as intelligent agents, it must be given that client ap-
plications are able to explore and understand server
functionality and data autonomously (Verborgh et al.,
2011). Considering AJAN agents as intelligent clients
that operate based on the provided application data,
these requirements need also to be fulfilled by our
framework’s network API. In this respect, providing
server data as HTTP resources that fulfill Fielding’s
6
Unity3D: https://unity3d.com
7
https://www.w3.org/WoT/WG/
hypermedia constraints (Fielding and Taylor, 2002),
and with this, comply to a level 3 Richardson matu-
rity model (Parastatidis et al., 2010), has been found a
suitable way to match the requirements identified by
Verborgh et al.
In the following, we outline how we achieve to
lift the software components indicated in Figure 1
to a Linked Data representation to achieve a Re-
source Oriented Architecture (ROA) for the frame-
work toolchain. The Linked Data layer of the result-
ing architecture ensures structural interoperability of
the different tools’ runtime data. By ensuring Level
3 Richardson Maturity Model compliance, we ensure
more over that data can be autonomously explored
and interpreted by AJAN agents.
3.1.1 Data Publishing
We employ ECA2LD (Spieldenner et al., 2018) to
lift the stand-alone World server, as well as Unity3D,
to RDF
8
. ECA2LD performs an automatic structural
mapping from Entity-Component-Attribute (ECA)
based runtimes, as it is the case for Unity3D and the
standalone worldserver, to a Linked-Data represen-
tation in compliance with the Linked Data Platform
W3C recommendation
9
.
As result of the mapping, Entities (resp. game ob-
jects in Unity3D), attached Components, and selected
Attributes that model relevant information, such as
3D position in space, sensor data, and others, are all
represented by individual resources with an HTTP
endpoint. Relevant information about the resources
is provided by RDF triples that describe the struc-
ture and type of data. Relations between resources,
such as Entity-Component relations, are established
as links between resources. Being provided with an
arbitrary resource as entry point, clients are by this
able to autonomously explore the provided server data
by following the established links. Moreover, the
RDF description of provided data enables clients to
identify subsets of resources of interest for their inter-
action via a SPARQL Query interface
10
.
The robotic systems, driven by the ROS opera-
tion system, are accessed by a RESTful layer that
complies to the Linked Robotic Things model, pre-
sented by Schubotz et al. (Schubotz et al., 2017).
Comparable to the Linked Data Platform representa-
tion that is generated from ECA based runtimes by
ECA2LD, the Linked Robotic Thing defines a Web
model for robotic data that fulfills level 3 Richardson
Maturity Model. In short, with the Linked Robotic
8
https://www.w3.org/RDF/
9
https://www.w3.org/TR/ldp/
10
https://www.w3.org/TR/rdf-sparql-query/
WEBIST 2019 - 15th International Conference on Web Information Systems and Technologies
90
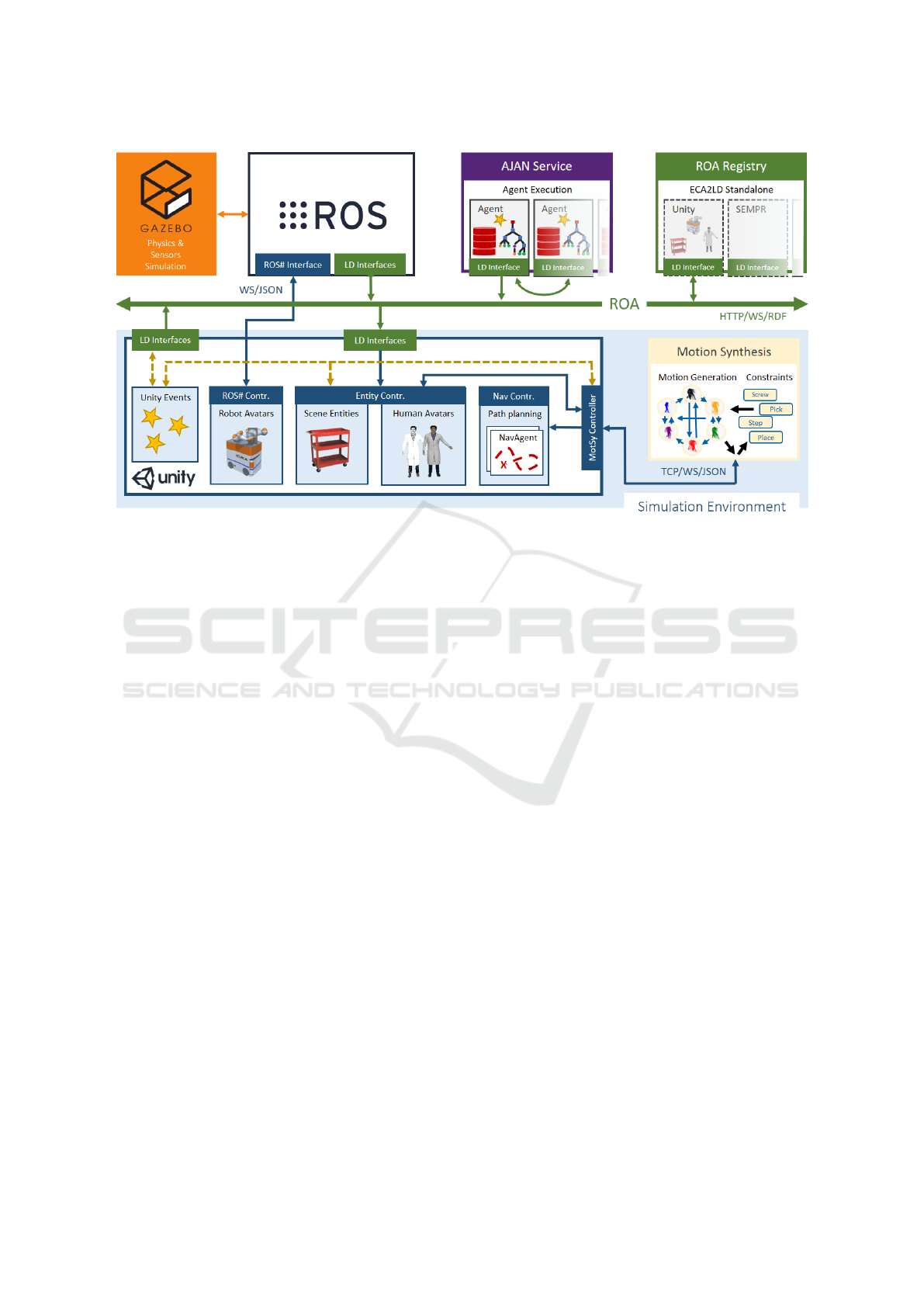
Figure 1: High level architecture of the collaborative robotic simulation framework. The different components from the
heterogenous software pool are linked by a unified resource-oriented Linked Data layer.
1 <s> sub:endpoint [WebSocketURI]
2 [WebSocketURI] sub:protocol sub:WebSocket
3 [WebSocketURI] rdf:format <messageFormat>
4
5 <s> sub:endpoint [WebHookURI]
6 [WebHookURI] sub:protocol sub:WebHook
7 [WebHookURI] rdf:format <messageFormat>
Figure 2: The information about subscription channels pro-
vided in RDF by Linked Data resources.
Things model, we are able to semantically describe
ROS robots in terms of components (such as sen-
sors, joints) and actions, and provide associated LD-
compliant APIs. Each of these concepts is provided
with an individual HTTP resource that, in addition to
the standard HTTP verbs, offers subscription mecha-
nisms to constantly read and write data from and into
the robotic application. This data may include, but is
not limited to, streaming data from robotic sensors,
reading or writing joint values, or sending commands
to the robotic execution system.
Using the above mentioned methodologies for
data publication on a common Web layer for both
robotic and non-robotic systems, we achieve a uni-
fied, mutually understood data representation. Inde-
pendent of the underlying application, clients are able
to explore data by following links, also between ap-
plications. By this, we achieve full structural and data
interoperability on the Web as integration layer.
3.1.2 Interfaces to Data Resources
To interact with data resources following HTTP oper-
ations are available: GET, to read out resource infor-
mation; PUT, to update resource information; POST,
to create a resource; and DELETE, to delete the re-
source. Information about further interaction possi-
bilities with the resource can be obtained by using
the HTTP OPTIONS operation. For example, the
ECA2LD model offers an RDF description for a sub-
scription mechanism that goes beyond the standard
HTTP vocabulary (see Fig. 2). In addition to sub-
scribing to resource changes via WebHook or Web-
Socket, an RDF-based data sheet describing the trans-
ferred data model is also offered.
3.2 Robot Control and Simulation
As described in Section 3.1.1 commands to and from
the robotic execution system are sent with RESTful
operations. In our implementation we use ROS, a
popular open-source robotics middleware. ROS im-
plements many robotic components and algorithms
like navigation stacks (e.g. SLAM navigation) and
motion planning (e.g. MoveIt). Furthermore, ROS
supports robot simulation by integrating the Gazebo
Robot Simulator (Koenig and Howard, 2004) which
provides Gazebo services by exposing them as ROS
services. In order to use the robot simulation we only
need to configure ROS to use Gazebo instead of a real
robot. This guarantees that the robot behavior in the
Agent-based Web Supported Simulation of Human-robot Collaboration
91

Figure 3: Running ROS (RVIZ visualization of navigation component on the right) and Gazebo (left) for the wing assembly
simulation, to control a mobile one arm robot.
simulation is at least close to the ’real’ robot behavior.
For controlling the robot commands can be sent via
the ROA to navigation planning, movement planning
and picking components. When ROS is started with
the Gazebo simulator, the commands are executed by
a simulated robot. To visualize robots ROS#
11
is used
to import URDF (Unified Robot Description Format)
models into Unity3D.
3.2.1 Interfaces to Data Resources
Figure 4: Linked Robotic Things model representation of
a ROS robot move action goal topic SimpleMoveBase and
result topic SimpleMoveBaseResult.
As a concrete example we describe here the API
used to execute a move action of the ROS robot plat-
form. ROS is built on top of a publish-subscribe sys-
11
Open Source C# library for communicating with ROS:
https://github.com/siemens/ros-sharp
tem and ROS actions are executed by sending mes-
sages to specific topics and subscribing to messages
on specific topics. The movement action offers two
topics, a goal topic with a target pose and a result topic
that informs us of the success or failure of an action.
Accordingly to the Linked Robotic Things model both
topics are accessible via a REST API and their RDF
representation can bee seen in Figure 4. We extend
the original concept with a hybrit:websocketUrl pred-
icate in order to be able to specify WebSocket end-
point different to the endpoint of the resource. This
can be necessary when the WebSocket endpoint is
implemented by a technology other than HTTP end-
point.
3.3 Unity3D Simulation Environment
The frameworks as used according to Section 3.2 so
far only cover robotic components and plan execution.
We maintain and simulate remaining objects and en-
tities which are not part of the robotic world in an in-
teractive 3D run-time environment in the Unity3D
12
game engine. This allows for including avatars of
human workers, as well as rigid bodies for tools and
working material that is crucial for completion of the
modelled task, but not directly linked to any robotic
system. The simulated three-dimensional environ-
ment is visualized in an planning-editor and contains
all objects to be displayed with their respective states.
The editor interface provides means to the end-user to
manipulate 3D objects and properties of the produc-
tion units at run-time.
To generate realistic human animations in our
simulation, we use a data-driven approach based on
12
Unity: https://unity3d.com
WEBIST 2019 - 15th International Conference on Web Information Systems and Technologies
92
motion capture data. The motion data is manually
segmented into actions and automatically processed
into a directed graph of parameterized motion models
based on the approach presented by Min et al. (Min
and Chai, 2012) and will be discussed in more detail
in Section 4.2. The respective motion simulation is
directly integrated into the Unity3D simulation envi-
ronment.
We implemented a set of Unity3D scripts that
use ECA2LD (cf. Section 3.1.1) to publish data of
Unity3D game objects directly in terms of Linked
Data Platform resources. Connected applications can
by this retrieve simulation relevant data, i.e. states of
simulated objects, via a Web based Linked Data inte-
gration layer that complies to the concepts described
in (Spieldenner et al., 2018).
For the individual control of the simulated actors
of a hybrid team, AJAN agents are used in our ap-
proach. AJAN is a multi-agent Web service developed
for the intelligent orchestration of Linked Data
13
(LD)
resources and was already used for various human
simulations in 3D worlds, see (Antakli et al., 2018),
(Zinnikus et al., 2017). To access simulated entities
managed in unity3D, AJAN uses their LD abstraction
layer provided by ECA2LD.
4 AGENT-BASED
ORCHESTRATION
4.1 Distributed Control with AJAN
The multiagent system (MAS) paradigm has already
proven that it can be used to realize advanced
distributed applications in environments with a
high diversity like IoT or LD domains, see (Bosse,
2016),(Xu et al., 2013),(Khriyenko and Nagy,
2011),(Diaconescu and Wagner, 2015),(Garcia-
Sanchez et al., 2008). Individual agents of a MAS are
autonomous, interconnected and to a certain extent
intelligent units, which perceive their environment
and decide independently how to interact with it. The
MAS paradigm is predestined to implement a higher
value ”intelligent” functionality of semantically
described heterogeneous domains on application
level, while hiding the deployment context from the
user. AJAN (Accessible Java Agent Nucleus) is an
agent system designed to interact with LD domains.
RDF/SPARQL enhanced Behavior Trees (BT) are
used as an agent behavior model to dynamically
explore such domains and to query and orchestrate
LD resources.
13
Linked Data: https://www.w3.org/standards/semanticweb/data
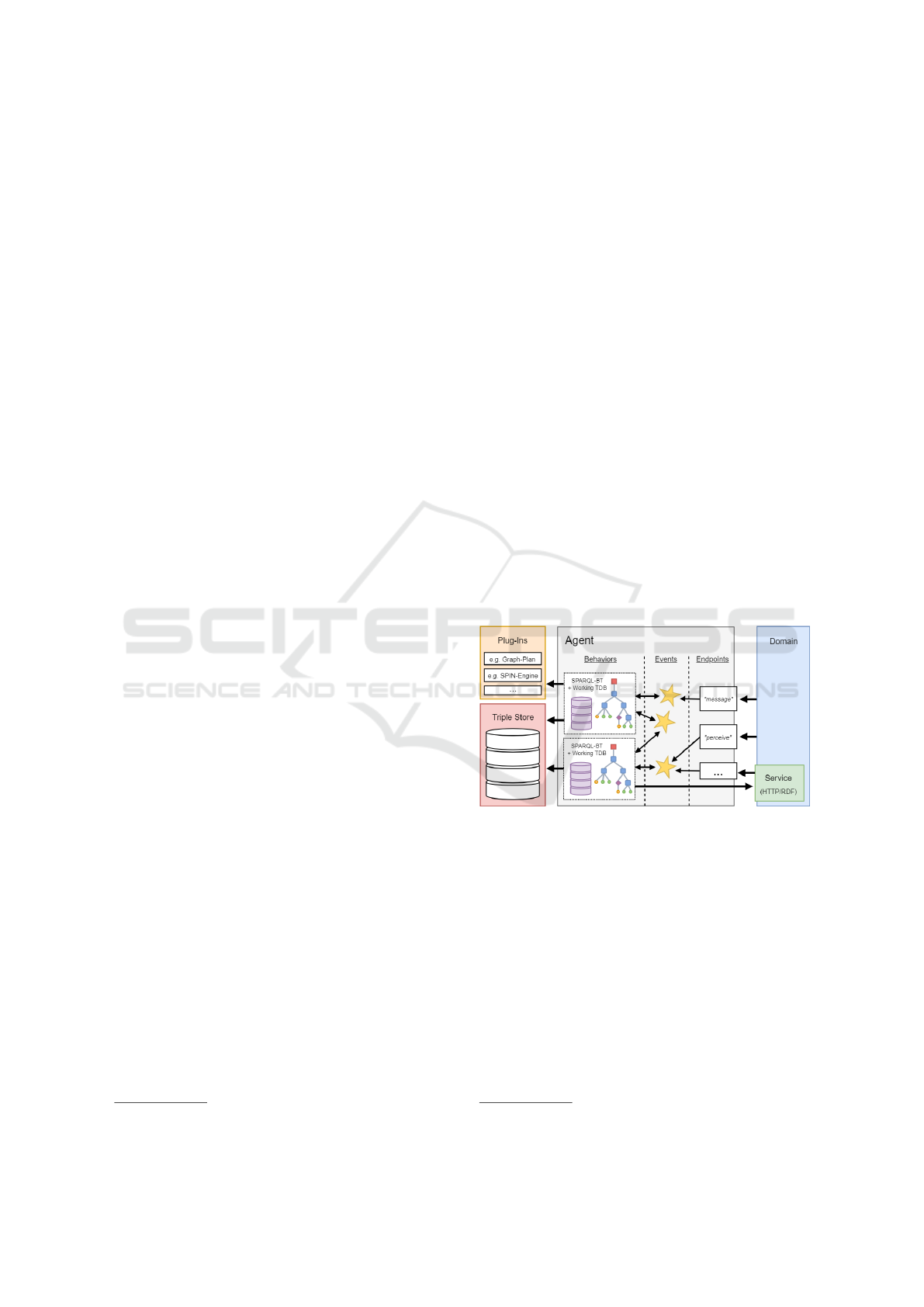
4.1.1 AJAN Agent Model
An AJAN agent has one or more behaviors, each exe-
cuted in a single thread and consisting of a SPARQL-
BT (see Section 4.1.2) and a corresponding behav-
ior RDF database; one agent specific knowledge base
(KB), storing inter-behavior knowledge like the agent
status; one or more events, each holding RDF data
in the form of named graphs for behaviors; and one
or more HTTP endpoints. These endpoints are the
agent’s interfaces to its LD-domain and forward in-
coming RDF messages as named graphs in form of
events. Behaviors can be linked to these events. If
an event occurs, the behaviors linked to it are exe-
cuted. While executing a SPARQL-BT, it can access
special incoming event data by querying its named
graph. Each Behavior can also create events to trig-
ger other behaviors. In addition, the agent state can be
checked and manipulated during execution, as well as
interacting with LD resources.
By using the AJAN plug-in system, AI methods
can be integrated as behavior primitives for behavioral
modeling. For example, a SPARQL-BT can be syn-
thesized during GraphPlan-based (Meneguzzi et al.,
2004) action planning, or by using a SPIN-rule en-
gine
14
, the agent KB can be extended.
Figure 5: AJAN-Agent model overview.
4.1.2 AJAN Behavior Model
For modeling agent behavior in LD domains, AJAN
uses an extension of the Behavior Trees (BT)
paradigm widely used in industry and robotics (see
(Marzinotto et al., 2014), (Paxton et al., 2017),
(Nguyen et al., 2013)), the SPARQL-BT approach.
SPARQL-BTs, as one might expect, are a combi-
nation of the BT paradigm with SPARQL, which
is first mentioned in (Schreiber et al., 2017). Basi-
cally, BTs are used in AJAN to perform contextual
SPARQL queries for state checking, updating, or
constructing RDF data used for action executions.
Furthermore, SPARQL-BTs are defined in RDF,
14
Using the engine integrated in rdf4j: http://rdf4j.org
Agent-based Web Supported Simulation of Human-robot Collaboration
93
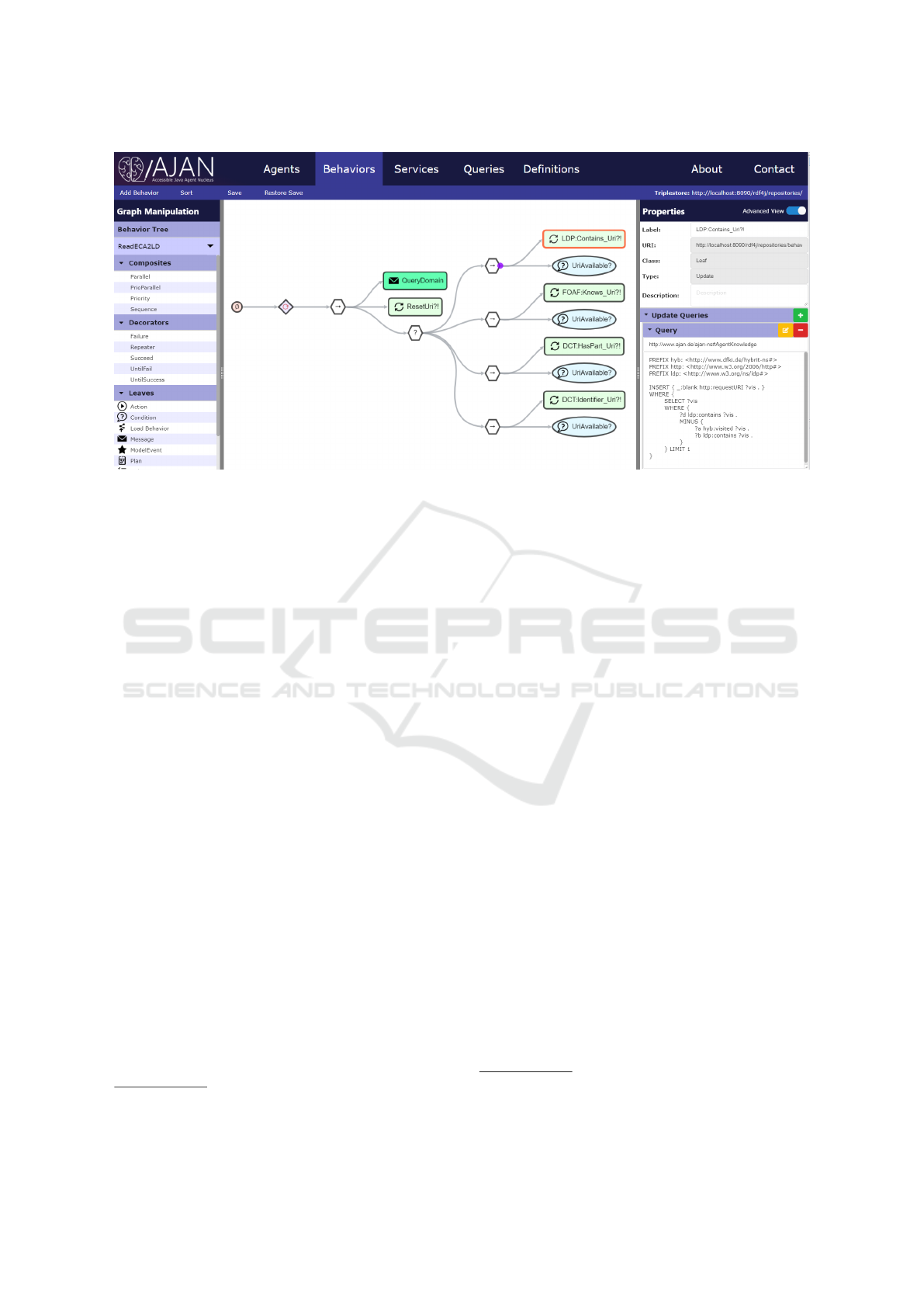
Figure 6: SPARQL-BT displayed in the AJAN Editor to examine an ECA2LD domain. The GET node (turquoise) in the
iterating BT first queries an previously selected ECA2LD resource (URI). The resulting RDF graph is then queried via a
Selector node (labeled with ’?’) for different relations shown, from which an unvisited ECA2LD resource is selected for the
next iteration.
whereby a semantic description of the behaviors they
implement is available and to meet the requirements
of the LD paradigm. SPARQL-BTs use standard BT
composite and decorator nodes and are processed
like typical BTs
15
, but this approach defines three
main new leaf node types to work on RDF-based
datasets and resources using SPARQL queries. Thus,
a SPARQL-BT always has one or more RDF Triple
Stores that can be accessed via SPARQL endpoints
that follow the W3C standardized SPARQL protocol
(W3C, 2008).
SPARQL-BT Condition. A SPARQL-BT Con-
dition is a BT leaf node that makes a binary statement
about the presence of a graph-pattern in an RDF
dataset. It returns two states after execution: SUC-
CEEDED and FAILED and can be used to formulate
state conditions of an agent. Thereby, it performs one
SPARQL 1.1 ASK query on a defined RDF dataset.
The dataset can be a default graph or a named graph
and is represented by its SPARQL endpoint URI. To
define a SPARQL ASK query, the complete language
space of the SPARQL 1.1 language with regard to
ASK operations in (W3C, 2013a) can be used.
SPARQL-BT Update. This leaf node returns
two states after execution: SUCCEEDED and
FAILED and can be used to create, delete or update
RDF data in a Triple Store. Thereby, it performs
15
Behavior Tree framework based on libGDX:
https://github.com/libgdx/gdx-ai/wiki/Behavior-Trees
one SPARQL 1.1 UPDATE query on a defined RDF
dataset. The dataset can be a default graph or a
named graph and is represented by its SPARQL
endpoint URI. To define a SPARQL UPDATE query,
the complete language space of the SPARQL 1.1
UPDATE language in (W3C, 2013b) can be used.
SPARQL-BT Action. A SPARQL-BT Action leaf
node sends a RDF dataset via HTTP or WebSocket to
an external LD-resource which is defined by a URI
endpoint and an action description
16
. This dataset
is defined using a SPARQL 1.1 CONSTRUCT query.
The complete SPARQL 1.1 language space with
regard to CONSTRUCT operations in (W3C, 2013a)
can be used for this purpose. The RDF response
resulting from the executed external resource is then
inserted into a named graph of the agents knowledge
base. In this context, named graphs define the source
of the received result. A SPARQL-BT Action node
returns three states as comparable action nodes of
other BT implementations, SUCCEEDED, FAILED
and RUNNING. Actions that do not immediately
receive a result from executed LD resources, are
so-called asynchronous actions.
Beside of the SPARQL-BT nodes presented, further
nodes were realized, e.g. to dynamically choose
and execute AJAN behaviors or to interact with LD-
16
The description of resource actions respectively affor-
dances is oriented to the action language A defined in
(Gelfond and Lifschitz, 1998).
WEBIST 2019 - 15th International Conference on Web Information Systems and Technologies
94

resources like AJAN-agents, using HTTP methods
like GET, POST, PUT, OPTIONS or DELETE. The
ECA2LD approach presented in Section 3.1 provides
distributed data semantically and refers to their raw
form. In order to enable AJAN to interact with
a ECA2LD domain, it was extended with further
SPARQL-BT primitives to query data and to perform
domain actions over WebSockets. Since the data
addressed is not only stored in RDF, an RML based
17
mapping AJAN-plugin was established. With this
plugin XML, JSON or CVS data can be translated
into RDF to make it usable for SPARQL-BTs. In
figure 6 a SPARQL-BT is presented with which an
AJAN agent can autonomously explore an ECA2LD
domain to broaden its event and action horizon.
Given the URI of a ECA2LD entry point, it is
possible to iteratively query it over given links in
order to dynamically include the LD-resources found
into the agent planning process.
4.2 Worker Simulation
Realistic worker simulation is a prerequisite for the
evaluation of hybrid teams. Whereas many available
tools provide manikins based on predefined behavior
we synthesize digital human models from motion cap-
ture data and learned behavior using neural networks.
The worker motion synthesis functionality is im-
plemented as an external service that controls the state
of the human workers in the simulation by sending a
continuous stream of poses to Unity3D. Depending
on whether the web browser is the target platform of
the Unity3D application, either a TCP or a WebSocket
connection can be used by the server. The behavior
defined by the agent system is translated into worker
motions by providing a sequence of actions with a set
of spatial constraints in a custom JSON format to the
REST interface of the motion synthesis service. The
spatial constraints can be automatically derived from
the 3D environment based on annotated scene objects
and standard path planning functionality of the game
engine.
To produce realistic motions we use machine
learning models trained on reference motion capture
data. Depending on the type of action, the synthe-
sis service can either apply a statistical model-based
method (Min and Chai, 2012) or phase-functioned
neural networks (Holden et al., 2017) to generate the
motions. For manipulation actions with constraints on
the hands, such as picking, fastening of screws or ac-
tions involving tools, we apply the statistical motion
synthesis method in combination with inverse kine-
17
RML, a extension of the W3C-recommended R2RML
mapping language: http://rml.io
matics to produce motion clips. To accelerate the sta-
tistical motion synthesis for the real-time application,
we prepare a search data structure for each motion
model that enables a fast look up of a motion ex-
ample given constraints before it is further optimized
(Herrmann et al., 2017). For walking motions, how-
ever, we apply the phase-functioned neural network
which produces a smooth sequence of poses of arbi-
trary length given a reference path.
The motion synthesis runs in a separate thread
from the animation server that synchronizes the state
of the worker motion with Unity3D. This way the mo-
tion for each agent can be generated ahead of time and
stored in a pose queue. As soon as the pose queue is
empty the motion synthesis service will notify AJAN
that the action was completed and start looping an idle
motion until the next task is specified. In case that the
worker needs to react to a change in the environment
the pose queue can be emptied earlier by specifying a
new task before the current task is complete.
5 APPLICATION SCENARIO
Figure 7: Visualization of the wing assembly application
scenario with one robot and two workers.
Figure 8: Visualization of the hybrid team interaction.
The collaboration of workers with a robot to assemble
raceways in an commercial airplane wing (see Figure
7) demonstrate the challenges faced in a simulation
environment for human robot interaction. Due to the
overhead position of the parts to assemble, it is dif-
ficult for human workers to maintain an ergonomic
working posture while handling heavy or unwieldy
Agent-based Web Supported Simulation of Human-robot Collaboration
95

parts. Having a fully simulated environment allows
for checking for bottle necks or potential dangerous
situations that might occur in a real life application.
In our case, two human workers are simulated, per-
forming the task of picking up material from shelves
in the factory building, while a robot (steered by a
ROS application, see Figure 3) takes care of providing
them with tools at appropriate times. In the scenario
considered here, a worker and a robot are simulated.
The worker is responsible for placing the raceways,
whereas a robot stands ready to aid the worker by
bringing working material and pass it to the worker
in an ergonomically convenient fashion.
5.1 Scenario Realization
Figure 9: Visualization of the hybrid team interaction.
The scenario is visualized using Unity3D, access-
ing the Unity3D animation system and using out of
the box web communication to integrate our systems.
The workers are animated using synthesized motions
provided by our Motion Synthesis. This also ensures
that all the worker movements are reasonable and can
be performed by a living human being in a real world
scenario. The behavior of each worker is modelled us-
ing SPARQL-BTs, not only providing a blueprint for
the task to be completed but also allowing to react to
changes in the environment in real time. Every actor
in the scene shares common knowledge synchronized
via the ROA, and each change in the world state is
considered there as well. For this purpose each ac-
tor applies the same SPARQL-BT shown in Figure 6
to explore the ROA. In Figure 9 a SPARQL-BT of a
worker is displayed, where this BT is integrated (red
leaf node). The AJAN-controlled worker runs this
SPARQL-BT at the beginning to find simulated ob-
jects in the Unity3D scene, other AJAN agents, or
the mentioned ROS robot, to get status updates but
also to interact with them. The screwdriver position
is queried in the turquoise node – if it is carried by
robot (see Figure 8), the worker approaches the robot
to take over the screwdriver.
The underlying information comes from various
resources that the agent collects, and makes them
available through its KB for behavioral execution.
For example, the information that the screwdriver is
located at the robot comes from the Unity environ-
ment. Its actual position (which is JSON-based and
still needs to be transformed to RDF using the AJAN
mapping plugin) is derived from the position of the
robot arm actuator that holds the screwdriver, origi-
nating from the ROS robot itself. Both subscribed re-
source endpoints were referenced from the previously
explored ECA2LD-based ROA.
Figure 10: SPARQL query to create the input to execute a
move action of the ROS robot.
The robot is controlled by an AJAN agent as well,
sending instructions to a ROS environment and tak-
ing feedback from ROS into account to decide upon
the success of a desired action. Figure 10 shows
a SPARQL-BT that queries a predefined URI of a
named transformation in the Unity3D environment.
This transformation is then sent to the LD interface
(see Figure 4) of the ROS robot navigation component
using a SPARQL-BT action. For this purpose, the re-
quested transformation is converted into the ROS co-
ordinate system with the help of a construct query and
sent to the robot as an RDF-based ROS message. The
SPARQL query described can be seen in Figure 11,
where the orientation (see lines 16-19) and the posi-
tion of the mobile robotic platform (see lines 21-23) is
set. To receive the result of the navigation action, i.e.
whether the robot has found a path to the transferred
target and then reached it, AJAN listens to the offered
Result WebSocket Endpoint.
A possible transformation is, for example, a pre-
viously defined position in which the screwdriver can
be picked by the robot to deliver it to the worker.
5.2 Application Examples
Given a specified team behavior with roles and indi-
vidual tasks assigned, several aspects of the team per-
formance can be simulated and evaluated. Evaluation
criteria are e.g. time to fulfil a specific task sequence,
WEBIST 2019 - 15th International Conference on Web Information Systems and Technologies
96
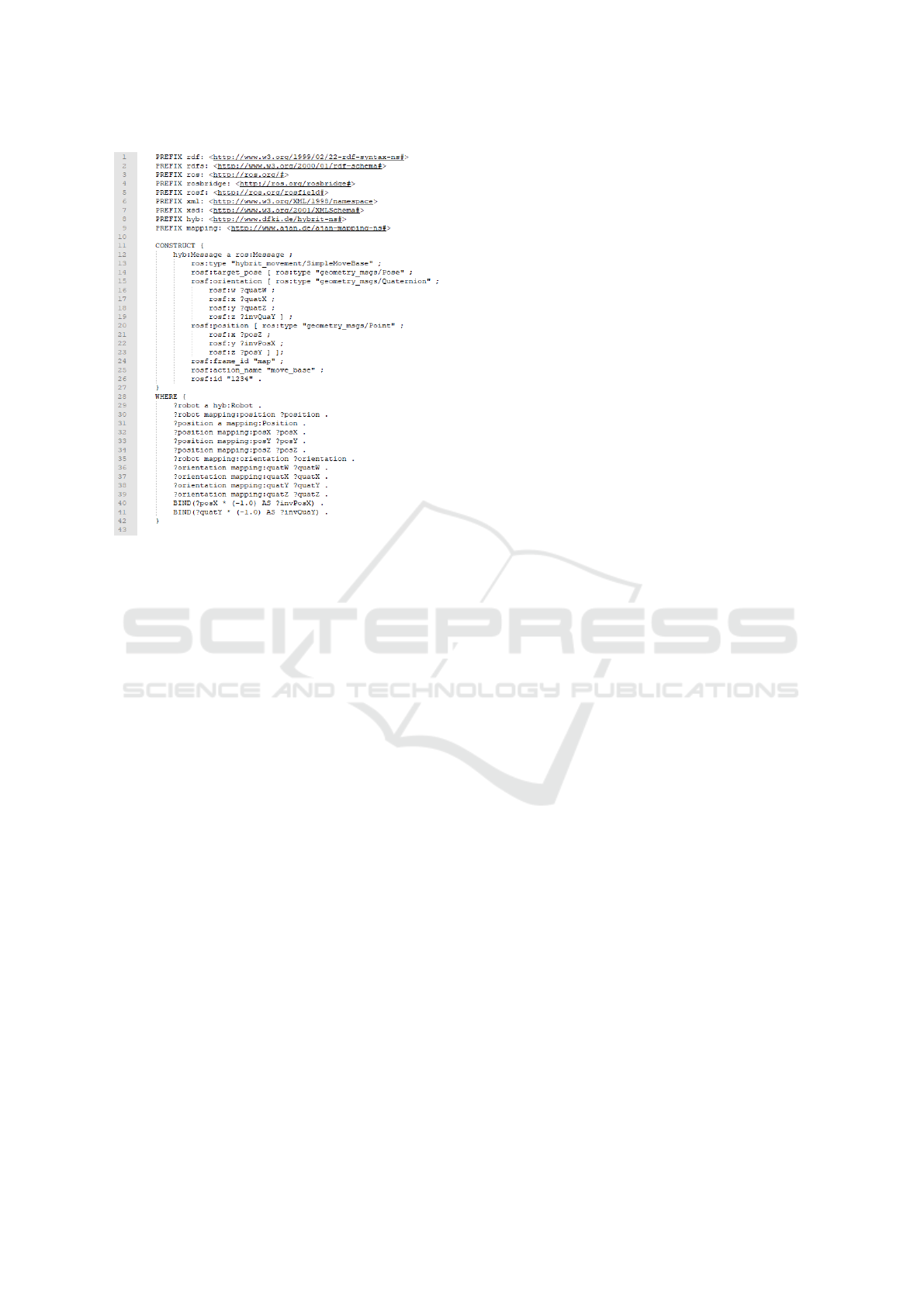
Figure 11: SPARQL query to create the input to execute a
move action of the ROS robot platform.
reachability of positions and objects, or ergonomic as-
sessment of poses based on visual appearance with
respect to different body sizes. In the application sce-
nario presented above, a number of observations and
experiences have been made:
• in certain configurations and job assignments, the
robot is often slowed down since trajectories of
workers and robot interfere. A deliberate change
of the assignments helps to reduce certain inter-
ferences;
• the robot can grasp a tool from a specified posi-
tion but the ensuing grasp pose leads to a frequent
slip of the tool in the gripper. To cope with this a
worker has to correct the grip or take over the tool
immediately;
• depending on a position assigned or calculated,
the robot is supposed to grasp a tool from a com-
missioning area which cannot be reached. Chang-
ing the position increases the success rate;
• in some cases, the same issue occurred for the hu-
man worker. Here, ergonomic aspects are assess-
ment based on visual appearance;
• the robot might damage the wing during naviga-
tion if robot arm is not properly in driving posi-
tion. A safe area has been introduced which the
robot is not allowed to enter;
• we discovered that certain task assignments could
be improved based on the information in the ROA,
e.g. it is better to assign a task dynamically to a
worker when a robot is too far away from a com-
missioning table;
• if available, sensor information can be fed into the
ROA to evaluate the impact on the team behavior;
• finally, it is possible to take into account the con-
text: is the configuration of team tasks able to deal
with e.g. a change in the clock rate or problems
due to missing supplies.
6 DISCUSSION
Programming a robot even for simulation purposes is
a complex endeavor. For the connection of a ROS-
controlled robot to the ROA, a corresponding control
software must nevertheless be available. In order to
obtain adequate robot behavior, the relevant sensor in-
formation must be generated, to which the controller
can react. In some cases this can be generated rel-
atively easily in the Unity3D environment, for other
sensor systems this task is very complex and time
consuming.
The ROA is designed to abstract from the under-
lying technology. As reported, we use a robot con-
troller based on ROS. For other commercial robot sys-
tems with their proprietary software a connection to
the ROA is future work.
When simulating human behavior to evaluate hy-
brid teams, the unpredictability of human behavior is
a problem. Several intended human responses may be
uncritical, but in some situations a safety-critical mo-
ment may result. One possible way to take this into
account is to randomize human behavior and generate
a variety of actions to test effects on robot behavior.
7 CONCLUSION
We presented a framework for the 3D simulation of
hybrid teams in production scenarios. Using an agent
framework for modeling dynamic behavior and mo-
tion synthesis for the animation of human worker be-
havior we developed a platform that enables end-users
(e.g. manufacturing planners) to specify and coordi-
nate team-based production processes where critical
situations can be created and evaluated. By clearly
specified Linked Data representations and developed
tools to lift applications to this representation, the
presented architecture is highly extendable and flex-
ible. It allows incorporating external services as e.g.
a ROS-based robot control software to ensure an ap-
propriate simulation of the behavior of the robots in-
Agent-based Web Supported Simulation of Human-robot Collaboration
97

volved. Based on the usage of RDF and the 3-RMM
compliance, the agent system AJAN is able to au-
tonomously understand new software components in
the architecture. Adapting the architecture to new
domain-specific applications is then reduced to mod-
elling fitting SPARQL-BTs that operate on the new
data. Our approach has been applied to an aerospace
industry use case in an air plane assembly line.
ACKNOWLEDGEMENTS
The work described in this paper has been partially
funded by the German Federal Ministry of Education
and Research (BMBF) through the projects Hybr-iT
under the grant 01IS16026A, and REACT under the
grant 01/W17003.
REFERENCES
Antakli, A., Hermann, E., Zinnikus, I., Du, H., and Fischer,
K. (2018). Intelligent distributed human motion simu-
lation in human-robot collaboration environments. In
Proceedings of the 18th International Conference on
Intelligent Virtual Agents, IVA ’18, pages 319–324,
New York, NY, USA. ACM.
Awad, R., Fechter, M., and van Heerden, J. (2017). Inte-
grated risk assessment and safety consideration dur-
ing design of HRC workplaces. In 2017 22nd IEEE
International Conference on Emerging Technologies
and Factory Automation (ETFA), pages 1–10.
Bosse, S. (2016). Mobile Multi-agent Systems for the
Internet-of-Things and Clouds Using the JavaScript
Agent Machine Platform and Machine Learning as a
Service. In 2016 IEEE 4th International Conference
on Future Internet of Things and Cloud (FiCloud),
pages 244–253.
Diaconescu, I. M. and Wagner, G. (2015). Modeling and
Simulation of Web-of-Things Systems as Multi-Agent
Systems. In Mueller, J. P., Ketter, W., Kaminka,
G., Wagner, G., and Bulling, N., editors, Multiagent
System Technologies, volume 9433, pages 137–153.
Springer International Publishing, Cham.
Fielding, R. T. and Taylor, R. N. (2002). Principled design
of the modern web architecture. ACM Transactions on
Internet Technology (TOIT), 2(2):115–150.
Fritzsche, L., Sch
¨
onherr, R., and Illmann, B. (2014). Inter-
active simulation and ergonomics assessment of man-
ual work with EMA–applications in product develop-
ment and production planning. In Advances in Applied
Digital Human Modeling. AHFE, pages 49–58.
Garcia-Sanchez, F., Fern
´
andez-Breis, J. T., Valencia-
Garcia, R., G
´
omez, J. M., and Martinez-B
´
ejar, R.
(2008). Combining Semantic Web technologies with
Multi-Agent Systems for integrated access to biolog-
ical resources. Journal of Biomedical Informatics,
41(5):848–859.
Gelfond, M. and Lifschitz, V. (1998). Action languages.
Electronic Transactions on AI, 3.
Gopinath, V. and Johansen, K. (2016). Risk assessment pro-
cess for collaborative assembly–a job safety analysis
approach. Procedia CIRP, 44:199–203.
Guinard, D. and Trifa, V. (2009). Towards the web of things:
Web mashups for embedded devices. In Workshop on
Mashups, Enterprise Mashups and Lightweight Com-
position on the Web (MEM 2009), in proceedings of
WWW (International World Wide Web Conferences),
Madrid, Spain, volume 15.
Heath, T. and Bizer, C. (2011). Linked data: Evolving the
web into a global data space. Synthesis lectures on the
semantic web: theory and technology, 1(1):1–136.
Herrmann, E., Manns, M., Du, H., Hosseini, S., and Fischer,
K. (2017). Accelerating statistical human motion syn-
thesis using space partitioning data structures. Com-
puter Animation and Virtual Worlds, 28(3-4):e1780.
Holden, D., Komura, T., and Saito, J. (2017). Phase-
functioned neural networks for character control.
ACM Transactions on Graphics (TOG), 36(4):42.
Kashevnik, A., Teslya, N., Yablochnikov, E., Arckhipov, V.,
and Kipriianov, K. (2016). Development of a proto-
type cyber physical production system with help of
smart-m3. In IECON 2016 - 42nd Annual Confer-
ence of the IEEE Industrial Electronics Society, pages
4890–4895.
Khriyenko, O. and Nagy, M. (2011). Semantic web-driven
agent-based ecosystem for linked data and services.
In Proceedings of the Third International Conferences
on Advanced Service Computing, pages 25–30.
Koenig, N. and Howard, A. (2004). Design and use
paradigms for gazebo, an open-source multi-robot
simulator. In 2004 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS) (IEEE
Cat. No.04CH37566), volume 3, pages 2149–2154.
Marzinotto, A., Colledanchise, M., Smith, C., and
¨
Ogren, P.
(2014). Towards a unified behavior trees framework
for robot control. In 2014 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
5420–5427.
Meneguzzi, F. R., Zorzo, A. F., and da Costa M
´
ora, M.
(2004). Propositional planning in BDI agents. In
Proceedings of the 2004 ACM Symposium on Applied
Computing, SAC ’04, pages 58–63, New York, NY,
USA. ACM.
Min, J. and Chai, J. (2012). Motion graphs++: a com-
pact generative model for semantic motion analysis
and synthesis. ACM Transactions on Graphics (TOG),
31(6):153.
Mourtzis, D., Papakostas, N., Mavrikios, D., Makris, S.,
and Alexopoulos, K. (2015). The role of simulation in
digital manufacturing: applications and outlook. In-
ternational Journal of Computer Integrated Manufac-
turing, 28(1):3–24.
Nguyen, H., Ciocarlie, M. T., Hsiao, K., and Kemp, C. C.
(2013). ROS commander (ROSCo): Behavior cre-
ation for home robots. 2013 IEEE International Con-
ference on Robotics and Automation, pages 467–474.
WEBIST 2019 - 15th International Conference on Web Information Systems and Technologies
98

Ore, F., Hanson, L., Delfs, N., and Wiktorsson, M. (2014).
Virtual evaluation of industrial human-robot coopera-
tion: An automotive case study. In 3rd International
Digital Human Modeling Symposium (DHM2014),
May 20-22, Odaiba, Japan.
Parastatidis, S., Webber, J., Silveira, G., and Robinson, I. S.
(2010). The role of hypermedia in distributed sys-
tem development. In Proceedings of the First Inter-
national Workshop on RESTful Design, pages 16–22.
ACM.
Paxton, C., Hundt, A., Jonathan, F., Guerin, K., and Hager,
G. D. (2017). CoSTAR: Instructing collaborative
robots with behavior trees and vision. In 2017 IEEE
International Conference on Robotics and Automation
(ICRA), pages 564–571. IEEE.
Pedrocchi, N., Vicentini, F., Matteo, M., and Tosatti, L. M.
(2013). Safe human-robot cooperation in an indus-
trial environment. International Journal of Advanced
Robotic Systems, 10(1):27.
Pfisterer, D., Romer, K., Bimschas, D., Kleine, O., Mietz,
R., Truong, C., Hasemann, H., Kr
¨
oller, A., Pagel, M.,
Hauswirth, M., Karnstedt, M., Leggieri, M., Passant,
A., and Richardson, R. (2011). Spitfire: toward a se-
mantic web of things. IEEE Communications Maga-
zine, 49(11):40–48.
Schreiber, W., Z
¨
url, K., and Zimmermann, P., edi-
tors (2017). Web-basierte Anwendungen Virtueller
Techniken: Das ARVIDA-Projekt – Dienste-basierte
Software-Architektur und Anwendungsszenarien f
¨
ur
die Industrie. Springer Vieweg.
Schubotz, R., Vogelgesang, C., Antakli, A., Rubinstein,
D., and Spieldenner, T. (2017). Requirements and
Specifications for Robots, Linked Data and all the
REST. In Proceedings of Workshop on Linked Data in
Robotics and Industry 4.0. Workshop on Linked Data
in Robotics and Industry 4.0 (LIDARI-2017). CEUR.
Sheth, A. P. (1999). Changing focus on interoperability in
information systems: from system, syntax, structure
to semantics. In Interoperating geographic informa-
tion systems, pages 5–29. Springer.
Spieldenner, T., Schubotz, R., and Guldner, M. (2018).
Eca2ld: From entity-component-attribute runtimes to
linked data applications. In Proceedings of the In-
ternational Workshop on Semantic Web of Things
for Industry 4.0. Extended Semantic Web Confer-
ence (ESWC-2018), International Workshop on Se-
mantic Web of Things for Industry 4.0, located at 15th
ESWC Conference 2018, June 3-7, Heraklion,, Crete,
Greece. Springer.
Tsarouchi, P., Makris, S., and Chryssolouris, G. (2016).
Human—robot interaction review and challenges
on task planning and programming. Interna-
tional Journal of Computer Integrated Manufactur-
ing, 29(8):916–931.
Verborgh, R., Steiner, T., Van Deursen, D., Van de Walle,
R., and Vall
´
es, J. G. (2011). Efficient runtime service
discovery and consumption with hyperlinked restdesc.
In 2011 7th International Conference on Next Gener-
ation Web Services Practices, pages 373–379. IEEE.
Villani, V., Pini, F., Leali, F., and Secchi, C. (2018). Survey
on human–robot collaboration in industrial settings:
Safety, intuitive interfaces and applications. Mecha-
tronics, 55:248–266.
W3C (2008). SPARQL 1.1 Protocol.
https://www.w3.org/TR/sparql11-protocol/. [On-
line; accessed 19-May-2019].
W3C (2013a). SPARQL 1.1 Query Language.
https://www.w3.org/TR/2013/REC-sparql11-query-
20130321/. [Online; accessed 19-May-2019].
W3C (2013b). SPARQL 1.1 Update.
https://www.w3.org/TR/sparql11-update/. [On-
line; accessed 19-May-2019].
Xu, X., Bessis, N., and Cao, J. (2013). An Autonomic
Agent Trust Model for IoT systems. Procedia Com-
puter Science, 21:107–113.
Zinnikus, I., Antakli, A., Kapahnke, P., Klusch, M., Krauss,
C., Nonnengart, A., and Slusallek, P. (2017). In-
tegrated semantic fault analysis and worker support
for cyber-physical production systems. In 2017 IEEE
19th Conference on Business Informatics (CBI), vol-
ume 1, pages 207–216. IEEE.
Agent-based Web Supported Simulation of Human-robot Collaboration
99
