Security for Low-end Automotive Sensors:
A Tire-pressure and Rain-light Sensors Case Study
Adrian Musuroi, Bogdan Groza, Stefan Murvay and Horatiu Gurban
Faculty of Automatics and Computers, Politehnica University, Vasile Parvan Boulevard, Timisoara, Romania
Keywords:
Sensor, Tire Pressure Monitoring, Rain-light Sensors.
Abstract:
In recent years, the security of in-vehicle buses and components has been extensively addressed, but only a few
research works considered the security of low-end in-vehicle sensors. The main problem in addressing such
components stems from the numerous constraints, both in terms of computational power, since most sensors
are equipped with low-speed 8 bit controllers, and low bandwidth. In this work we use as a case study a tire-
pressure sensor and a rain-light sensor. The first communicates over radio-frequency while the second uses
a low-speed in-vehicle bus, both interfaces having a very low bandwidth and reduced packet size of only 64
bits. Under these constraints we discuss the design of a cryptographic security protocol based on an existing
lightweight block cipher in order to assure both security and privacy objectives.
1 INTRODUCTION
In this work we address security and privacy issues
related to tire-pressure and rain-light sensors. The se-
curity of vehicle subsystems has been carefully exam-
ined in the recent years, e.g., (Koscher et al., 2010),
(Checkoway et al., 2011), (Miller and Valasek, 2014).
Also, security issues regarding sensors in autonomous
vehicles have been pointed out by authors in (Yan
et al., 2016). But due to a somewhat reduced im-
pact on safety and security, there are not many works
that focused on the security of low-end components
such as tire pressure sensors or rain-light sensors.
Still, the insecurity of these components may cause
serious concerns as these components are present on
many recently manufactured vehicles. In particular,
tire pressure monitoring systems (TPMS) are cur-
rently mandatory in order to increase traffic safety
and reduce pollution (van Zyl et al., 2013), (Ergen
and Sangiovanni-Vincentelli, 2017). What these sen-
sors have in common is that they have communica-
tion interfaces with very low bandwidth and a reduced
packet size of only 64 bits. The first communicates
over radio-frequency while the second is wired and
uses a low-speed in-vehicle bus, the Local Intercon-
nect Network (LIN).
For tire pressure monitoring systems (TPMS) both
security and privacy concerns have been previously
raised (Ishtiaq Roufa et al., 2010). In particular, trac-
ing vehicles based on the unique sensors IDs may be
a serious concern regarding the privacy of users. We
discuss some related work on TPMS security in the
next section. For rain-light sensors (RLS) there is
no research so far, but due to the safety-critical fea-
tures to which they are linked, i.e., automatic control
of lights or windshield wipers which may affect road
visibility, addressing their security seems also to be
relevant. Since recent research works have pointed
out security issues of the LIN bus (Takahashi et al.,
2017) to which these sensors are connected, future at-
tacks are possible.
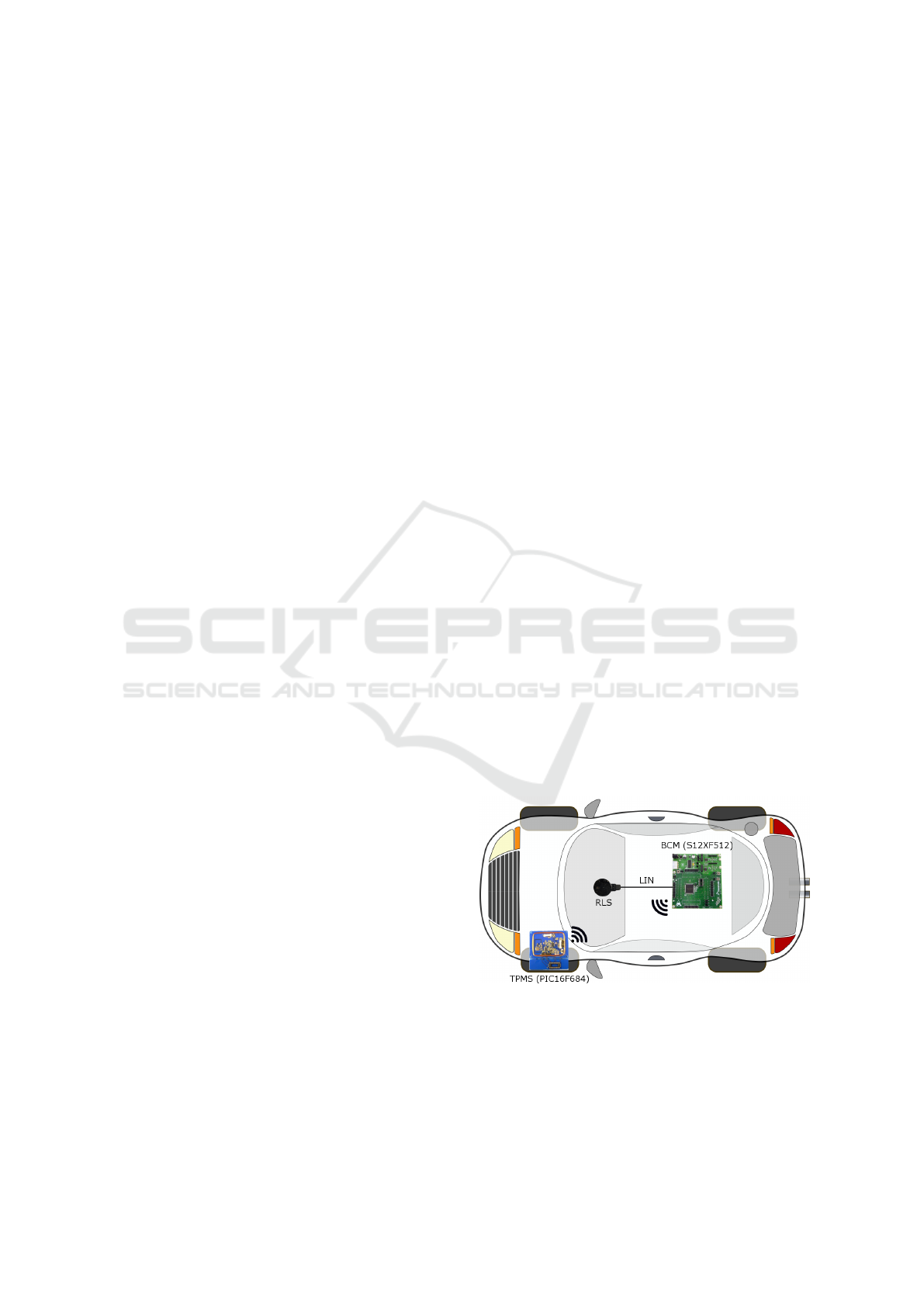
Figure 1: Addressed scenario.
Our paper is organized as follows. In the next
subsection we discuss some related work on TPMS
and background on RLS. Section 2 presents results
on eavesdropping data from real-world TPMS sensors
and gives a clearer image on the addressed problem.
Then in section 3 we present the experimental setup,
Musuroi, A., Groza, B., Murvay, S. and Gurban, H.
Security for Low-end Automotive Sensors: A Tire-pressure and Rain-light Sensors Case Study.
DOI: 10.5220/0008165400250033
In Proceedings of the 9th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS 2019), pages 25-33
ISBN: 978-989-758-385-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
25
discuss our protocol design and present some exper-
imental results. Finally, section 4 holds the conclu-
sions of our work.
1.1 Existing Solutions
The automotive industry introduces new comfort and
safety features with each new generation of vehicles.
Both tire-pressure monitoring systems (TPMS) and
rain-light sensors (RLS) are good examples in this di-
rection.
Following the attacks proposed in (Ishtiaq Roufa
et al., 2010) on TPMS several solutions were pro-
posed in the literature. One of the first solutions was
discussed by authors in (Xu et al., 2013) but the ex-
perimental results are on the Arduino platform which
is not a real-world TPM platform. A patent from Con-
tinental Corporation exists in (Toth, 2014) but the so-
lution does not appear to be secure since it is based on
CRC codes which are not a cryptographically secure
building block. A low-cost solution on a real-world
TPM sensor, i.e., the Infineon SP37 platform, was de-
veloped by the authors in (Solomon and Groza, 2015)
and similar to ours uses the SPECK 32/64 block ci-
pher (Beaulieu et al., 2015). In contrast to this, here
we use a distinct implementation platform, we focus
more on limitations of existing TPMS solutions and
go toward a more compact packet with SPECK 48/96
that saves some computational time (since it allows
to embed the entire data-field in a single encryption
block).
The RLS is a sensor able to detect rain intensity
and the ambient brightness. By detecting the rain-
drops on the windshield it can provide the information
needed to control the activation/deactivation and to
adjust the speed of the windshield wipers. The ambi-
ent brightness is used to control whether the daytime
running lights or the low beam lights are switched on.
The RLS is mounted on the interior upper part of the
windshield, above the rear-view mirror.
The information provided by the RLS are also
used by some automotive manufacturers to close the
windows/sunroof in case of rain, to modify the light
intensity of different interface elements: instrument
cluster, head-up display, infotainment unit display,
and other illuminated switches and buttons. There
are also variations of the RLS sensor with an inte-
grated humidity sensor that allows automatic wind-
shield ventilation for preventing windshield fogging.
We focused our attention on a 4th generation RLS
sensor from Hella. The RLS is usually connected to
a BCM module by using the Local Interconnect Net-
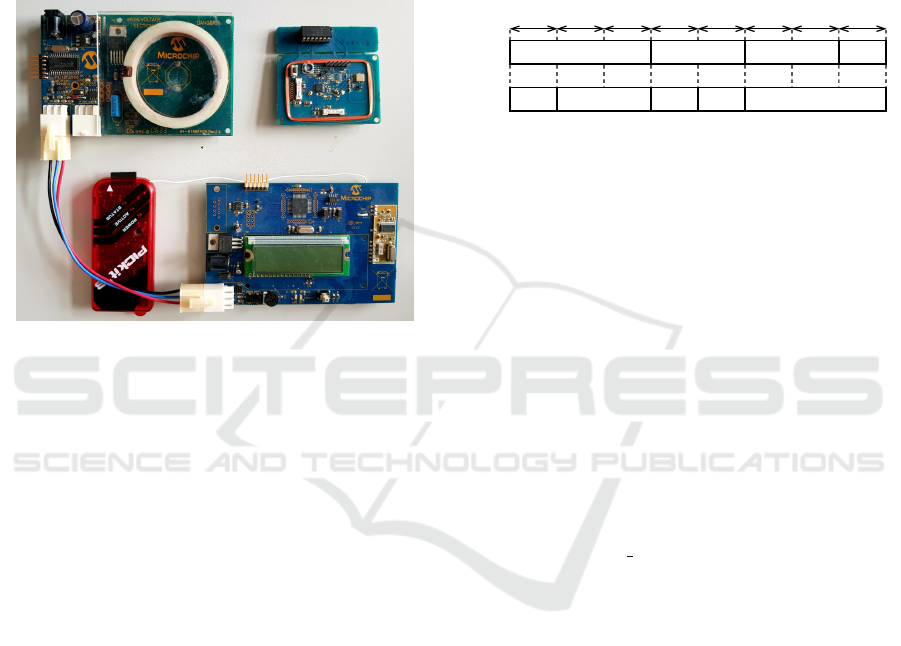
work (LIN) protocol. As shown in Figure 2, which
illustrates the structure of a LIN frame, the LIN data
field is limited to carrying 64 bits of data. The RLS
LIN frame used by our target sensor device can be
seen in Figure 3 (the PID field is blurred due to con-
fidentiality reasons). The RLS that we studied uses
a Renesas µPD78F1817 16-bit low-power microcon-
troller with a maximum operating speed of 24MHz.
Newer RLS devices from the same family use Rene-
sas R5F10AGG chips. Characteristics for both mi-
crocontrollers can be found in Table 1. To the best of
our knowledge there are no attacks reported so far on
such sensors and no countermeasures discussed in the
literature.
The RLS being located on the windshield, the LIN
bus wires have to cross a part of the car ceiling and go
trough one of the car pillars to connect in the Body
Control Module (BCM). The BCM acts as the LIN
bus master in this case. There aren’t many other in-
vehicle devices that may connect to the ceiling LIN
wire which makes the use of RF communication for
the RLS a plausible option for reducing wiring. RF
communication is a viable alternative considering that
the LIN bus is characterized by low-speed communi-
cation requirements and a reduced frame length. The
RLS does not have to be powered by its own bat-
tery like TPMS sensors since power cables are already
available on the car ceiling for assuring ambient light.
Our after-market RLS sensor is not programmable,
consequently, in the experimental section we focus on
the TPMS unit. But since from a computational per-
spective the RLS sensor is superior to the TPMS sen-
sor that we used, the proposed solution can be easily
deployed in any of the systems.
LIN Frame
Frame header
Frame response
SYNC
Break
Field
SYNC
Field
PID
Field
Data Field
CRC
min. 14 bits
1 byte 1 byte
1-8 bytes 1 byte
Figure 2: Structure of a LIN frame.
2 ASSESSING THE PROBLEM ON
REAL-WORLD TPMS SENSORS
Before proceeding to the design of a security proto-
col, we conducted experiments on real-world sensors
in order to determine the feasibility of practical at-
tacks. This would give a crisper image on the se-
curity problems related to TPMS. This section dis-
cusses about eavesdropping sensor data from existing
in-vehicle sensors.
Exploiting TPMS vulnerability to identify and
track vehicles requires that the adversary knows at
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
26

Table 1: Characteristics of RLS microcontrolers and components of our experimental setup.
Function Microcontroller Architecture Operating frequency RAM Flash EEPROM Connectivity
RLS µPD78F1817 16-bit 24MHz 8KB 128KB 16KB CSI with SPI support, simplified I2C, LIN/UART
RLS R5F10AGG 16-bit 32MHz 8KB 128KB 4KB CSI, simplified I2C,LIN/UART
BCM S12XF512 16-bit 100MHz 32KB 512KB 4KB CAN, FlexRay, SPI, SCI with LIN support
TPMS PIC16F684 8-bit 8MHz 128B 2Kword 256B RF
Figure 3: RLS LIN frame.
least one sensor ID for each target car. Finding these
values is not straightforward, because the data packet
format is not standard for all cars, thus the length and
positioning of the ID within the frame varies. Re-
search work done in (Ishtiaq Roufa et al., 2010) shows
that each TPMS sensor transmits a 28 - 32 bit ID,
which makes a car with 4 such sensors identifiable
and thus traceable. In (Ishtiaq Roufa et al., 2010),
the method used for finding the packet format was by
observing the changes in the data frame after chang-
ing only one measured variable at a time (tire tem-
perature or pressure). This reveals the position of the
corresponding variable in the frame. The bytes that
never change their values are suited candidates for
the ID. Normal pressure and temperature fluctuations
due to the wheel friction are sufficient to determine
the packet fields only if a large number of captured
frames is available. Otherwise, more drastic changes
are required and it may not be possible for an adver-
sary in a real context to increase the tire temperature
using a heat gun or to change the pressure by inflation
or deflation.
Tools for reverse engineering TPMS sensor data
are already available on-line. Free software is avail-
able for statistically inspecting TPMS frames that
were recorded from a moving vehicle.
1
However,
there are some considerations to be taken into ac-
count. First, this method requires time and expertise
because the software cannot decode the messages by
itself. Information such as the symbol rate and pream-
1
https://github.com/jboone/tpms
ble format must be provided by the user, consider-
ably reducing the adversary space. Secondly, because
the software is based on statistical analysis, we must
assume that the adversary is capable of recording a
relatively high number of messages with as few in-
terceptions as possible (i.e. transmissions from other
vehicles). The requirements for this task is that the ad-
versary is able to stay in close vicinity of the moving
vehicle (TPMS messages are usually transmitted only
when a certain speed is reached by the vehicle) while
making sure that there are as few other vehicles as
possible around so there are not many interceptions.
Considering also that the transmission rate is approx-
imately one minute, gathering a sufficient amount of
captures may be somewhat inconvenient for practical
reasons.
In our approach, we conducted TPMS reverse en-
gineering by using a commercial kit of programmable
sensors that are compatible with 98% of the vehicles
on the market. When programming the sensors, the
associated hardware and software tools allow us to
select a particular vehicle (i.e. brand and model) and
the sensor ID, the latter having the options to be gen-
erated within the software or handwritten. Automatic
ID generation indicates the specific ID length for each
vehicle model. One observation is that continuously
generating IDs will not change the value of the most
significant byte until other vehicle model is selected.
This indicates a possible common practice of using
IDs with the same most significant byte value for a
given vehicle. Further, the sensors can be diagnosed.
During this process, the kit emulates a BCM that trig-
gers the sensor to send data via RF. Searching the pre-
viously programmed ID in sensor transmissions al-
lows us to precisely determine its position in the data
frame.
The RF signal was captured using a HackRF One
receiver
2
with GNU Radio Companion and further
inspection, demodulation, symbol rate recovery and
symbol extraction were all made using Inspectrum.
3
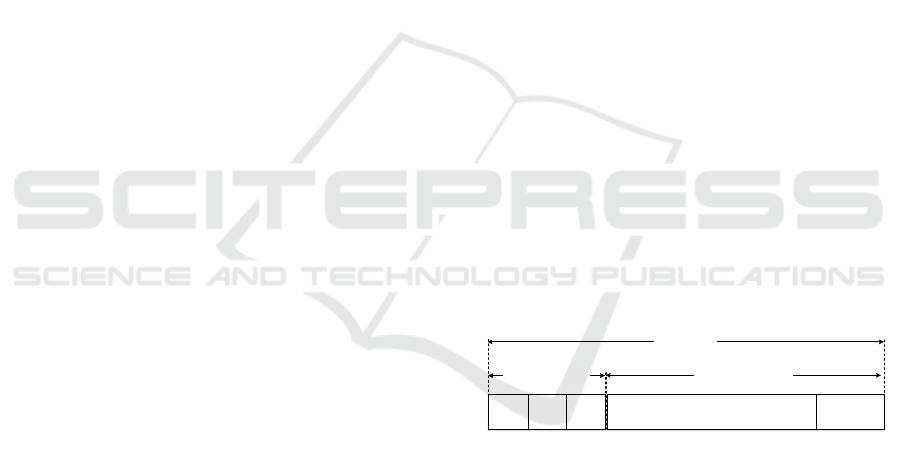
Figure 4 shows the HackRF tool and a commercial
tire sensor. In Figure 5 we show a TPMS trace cap-
tured from the sensor during diagnosing. The cursors
are manually placed to cover the entire signal, giv-
ing a raw signal length of 176 symbols. More useful
information such as the symbol rate and symbol pe-
2
https://greatscottgadgets.com/hackrf/one/
3
https://github.com/miek/inspectrum
Security for Low-end Automotive Sensors: A Tire-pressure and Rain-light Sensors Case Study
27

Figure 4: Analysis tools: HackRF and a commercial tire
sensor.
riod are displayed in the Controls view. After extract-
ing the symbols, removing the preamble and applying
Manchester decoding (most common encoding tech-
nique used), the previously programmed three-byte
ID is revealed within the data frame.
Further, we applied the same process for sensors
programmed for several vehicle brands and models
chosen from the Jato Dynamics 2018 best selling car
statistics,
4
but also for other popular brands not in-
cluded in this chart. We find that there are various pat-
terns for TPMS messages and we used them to group
vehicle models. Table 2 summarizes our results for
eight identified patterns. For each one, the preamble,
modulation method, encoding method, symbol rate,
ID length and ID positioning are shown. Also, in
the last column, we show the order in which the ID
bytes are sent, i.e., most or least significant byte first.
One mention is that for preamble identification we se-
lected the maximum number of leading symbols that
include repeated sequences of ’10’/’01’, or sequences
that cannot be a result of Manchester encoding (e.g. a
sequence of four 1’s). Values from the ID offset col-
umn were determined after removing the preamble.
From patterns no. 2, 4 and 5 we learn that mul-
tiple encoding techniques may be used in TPMS RF
transmissions. In our case, Non Return to Zero In-
verted encoding is used along Manchester, the latter
being the only encoding method considered in other
research works. Using multiple encodings adds ob-
scurity thus making reverse engineering more com-
plex, however it is unknown if this is done as a se-
curity measure. Pattern no. 1 sends the ID starting
with the least significant byte first while the others
start with the most significant one. The transmission
4
https://www.best-selling-cars.com/europe/
2018-full-year-europe-best-selling-car-models-in-the-
eu/
order is relevant in a scenario in which an adversary
attempts to track a vehicle with known IDs.
To validate our method of TPMS reverse engi-
neering, we attempted to recover the sensor IDs of
a 2017 vehicle equipped with stock factory sensors.
Due to privacy concerns, the vehicle brand or model
are not disclosed. Driving the vehicle while record-
ing TPMS’s specific frequency resulted in a rich set of
captured frames from our vehicle but also from others.
While inspecting the captures, we found that almost
all of them match one of our previously found pat-
terns based on raw length, preamble and symbol rate.
This is very promising considering that our list of pat-
terns is not exhaustive and that there are other existing
devices using the same transmission frequency. Fur-
ther, we selected 70 messages matching our specific
vehicle’s group pattern and extracted the values from
the supposed ID position in the frame. As expected,
we found only four different values, which are the
following: 0x28ccfe56, 0x28cd094b, 0x28ccf426 and
0x28cdce57. Note that the most significant byte has
the same value for all four IDs, consistent with our
earlier observation.
Attack Automation. By using a TPMS kit similar to
ours, one can create a database containing informa-
tion such as baud rate, transmission length, message
format, etc. for TPMS sensors of most modern vehi-
cles. Attacks such as the one described by us can be
automated and specialized tools may be developed.
This method would allow adversaries with no exper-
tise and with only one capture from each sensor to
retrieve all four IDs of a vehicle, raising a serious con-
cern about the security of current TPMS implementa-
tions.
Active Attacks. Spoofing attacks were also discussed
in (Ishtiaq Roufa et al., 2010). Authors showed that
injecting forged messages containing critical pressure
data can mislead the tire pressure monitoring system
and trigger warning messages to the driver. Having
at least one sensor ID of a vehicle, one adversary
can program the value to a commercial TPMS sen-
sor, which will generate valid messages, but with data
measured from an environment controlled by the ad-
versary. By eavesdropping TPMS messages we found
no evidence of any freshness mechanisms being used,
thus messages can be recorded and later replayed to
a targeted vehicle. The advantage of this method is
obvious. No software-defined radio or error checking
techniques (i.e. CRC) knowledge is required when
computing a forged message.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
28
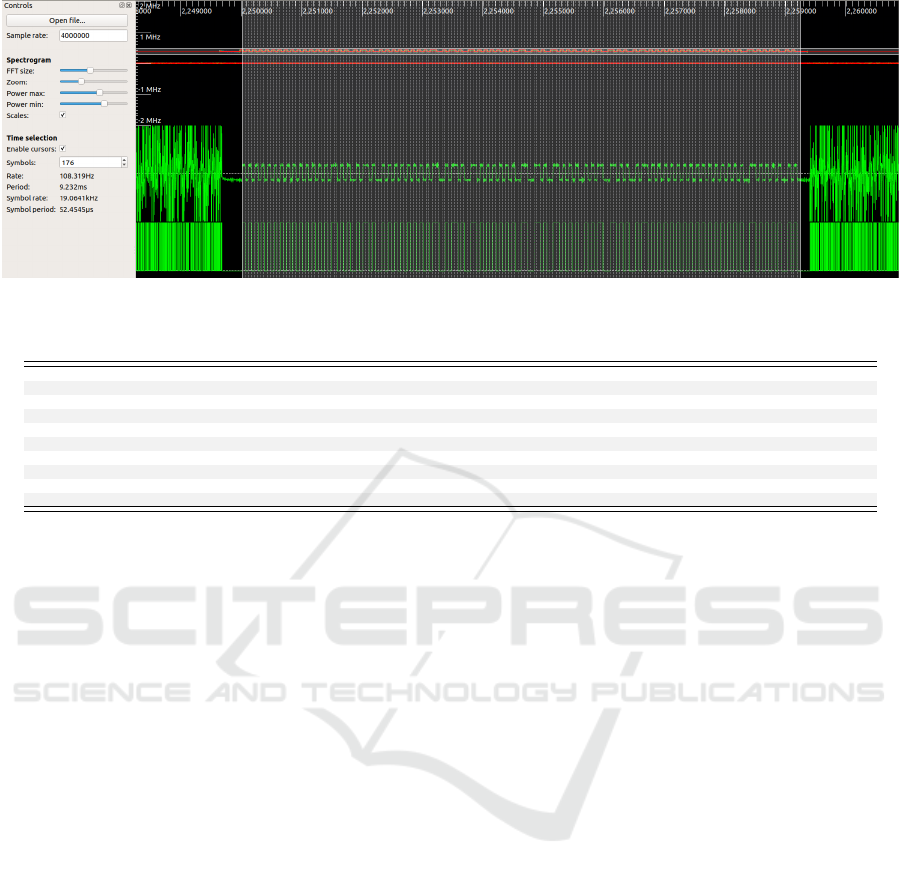
Figure 5: Captured TPMS message viewed in Inspectrum.
Table 2: Interpreting extracted data from sensors.
Pattern no. Total symbols Preamble Modulation Encoding Symbol rate ID length (bytes) ID offset (bits) MSBF/ LSBF
1 176 15555555h FSK Manchester 19 kHz 3 25 LSBF
2 208 AAAAAAh FSK Manchester 38 kHz 4 12 MSBF
2 220 2Ah FSK Manchester, NRZI 19 kHz 4 18 MSBF
3 159 15555555h FSK Manchester 19 kHz 4 1 MSBF
4 180 39999999999981Fh FSK Manchester, NRZI 19 kHz 3.5 2 MSBF
5 159 2A9Eh FSK Manchester, NRZI 19 kHz 3.5 4 MSBF
6 138 3D55h ASK Manchester 8 kHz 3.5 10 MSBF
7 193 15555555h FSK Manchester 19 kHz 4 9 MSBF
8 223 15555555h FSK Manchester 19 kHz 4 1 MSBF
3 SETUP AND PROPOSED
PROTOCOL
This section discuses the platforms that supported our
protocol implementation as well as details on our pro-
tocol design. Finally we discuss performance results
in terms of computational power an power consump-
tion.
3.1 Embedded Platforms
Two embedded platforms were employed as support
for our experiments. A TPMS kit from Microchip
(shown in Figure 6) based on PIC16F684 was cho-
sen as the low-end automotive TPMS sensor. The
kit comes with a base-station that receives informa-
tion from the sensor. However, the base station is
not an automotive-grade controller, a reason for which
we also included in our experiments an NXP S12XF
based EVB9S12XF512E development board. The
S12 family is commonly used in the automotive in-
dustry and thus having results on this platform is at
least worthy as a comparison. The RLS sensor that
we have is an after-market component and is not pro-
grammable. In terms of computational power, it lies
between our PIC controller and the S12 board, thus
the experimental results on the two should be convinc-
ing regarding the RLS as well.
PIC16F684 based Sensor. Our TPMS sensor de-
velopment platform from Microchip is built on a 8-
bit PIC16F684 microcontroller with an operation fre-
quency of up to 8 MHz. In terms of memory, the chip
features 2 Kwords of flash (program memory is ex-
pressed in words with 1 word = 14 bits), 128 Bytes
of RAM and 256 Bytes of EEPROM. From the oper-
ational point of view, the sensor is triggered by 125
kHz low-frequency (LF) messages sent by the base
station trough a LF Initiator module. When a valid
LF message is received by the on-board three-channel
Analog Front End (MCP2030), an interrupt is gener-
ated to wake up the processor from low-power mode.
Pressure, temperature and battery level are measured
and the data is sent back to the base station via 433.92
MHz radio frequency (RF). The actual sensor used by
Microchip in the sensor module design is an MS5407-
AM from Intersema, which is suited for this type of
applications.
S12XF based Receiver. Most functionalities related
to the vehicle body functional domain are usually im-
plemented by a single unit called BCM. Since TPM
and RLS fall into this category we opted for a re-
ceiver platform that is recommended for vehicle body
applications. The NXP S12X microcontroller family
is an option recommended for such applications. We
employed the EVB9S12XF512E development board,
equipped with an S12XF512 microcontroller, as the
BCM. The S12XF512 microcontroller provides 32
KBytes of RAM, 512 KBytes of Flash and a 16-bit
Security for Low-end Automotive Sensors: A Tire-pressure and Rain-light Sensors Case Study
29
main core that can operate at frequencies up to 100
MHz. Its communication capabilities cover options
for interacting with other in-vehicle modules via pro-
tocols such as CAN or FlexRay as well as protocols
to interface with various sensors and peripherals, i.e.
LIN, SPI and asynchronous serial communication.
This makes it easy to connect the microcontroller to
on-board sensors and radio-frequency transceivers en-
abling monitoring abilities for a wide range of sen-
sors.
Figure 6: Microchip TPMS kit.
3.2 Protocol Design Goals
As showed in section 2 and by related work, TPMS
sensors send data packets in plain, revealing IDs suf-
ficiently large for an adversary to track vehicles. Also,
the lack of freshness and authentication allows spoof-
ing and replay attacks to be performed undetected.
Our protocol aims to improve TPMS security, while
keeping the added time, memory and energy costs
as low as possible. Current standards in automotive
on-board communication request for authentication
tags of 24 bits and freshness parameters (AUTOSAR,
2017). Specifications for interfaces of cryptographic
primitives also exist in (AUTOSAR, 2015a) and (AU-
TOSAR, 2015b). For authenticity however we cannot
rely on constructions such as the HMAC (Krawczyk
et al., 1997) due to memory constraints on the sensor,
the only alternative being the CBC-MAC which can
be easily derived from the symmetric cipher that we
use.
Hardware constraints for in-wheel sensors were
also taken into consideration. For this type of ap-
plication, lightweight block ciphers are suited since
they require low amounts of memory and process-
ing power. The block cipher family of our choice is
SPECK (Beaulieu et al., 2015), released by NSA and
optimized for performance in software implementa-
tions.
3.3 Protocol Description
Data Packet Format. In the available implementation
examples, the Microchip sensor uses a data packet
with the structure from Figure 7 (i). The ID field
has three bytes, comparable to real sensors as shown
in our experimental study. Pressure and temperature
data are both two-byte fields and there is another one-
byte field for sending useful flags such as battery sta-
tus, giving a total of 8 bytes that are sent by the sensor.
ID PressureTemperature FLAGS
MACID Temperature Pressure FLAGS
i)
ii)
Byte 7 Byte 6 Byte 5 Byte 4 Byte 3 Byte 2 Byte 1 Byte 0
Figure 7: Structure of a data packet from TPMS.
Figure 7 (ii) shows the data packet format used
in our implementation once the security element is
added. In order to achieve data integrity, a three-byte
MAC field is added. To avoid increasing the power
consumption during transmissions, the ID and pres-
sure fields are reduced in size so that the final length
of the data packet remains 8 bytes. Because the ID
is encrypted and the message is authenticated (with a
session key), using only one byte for the ID field is
sufficient and even if collisions occur in the ID they
are further mitigated by checking the larger MAC.
Freshness. In our approach, we achieve message
freshness by using Counter mode for message encryp-
tion. This method prevents replay attacks and can
be implemented with ease on low-end embedded sys-
tems. Considering that for the smallest SPECK vari-
ant, i.e., SPECK32 64 the counter has the size of 32
bits and that TPMS sensors send data once a few min-
utes, capturing two messages encrypted with the same
counter value is unlikely.
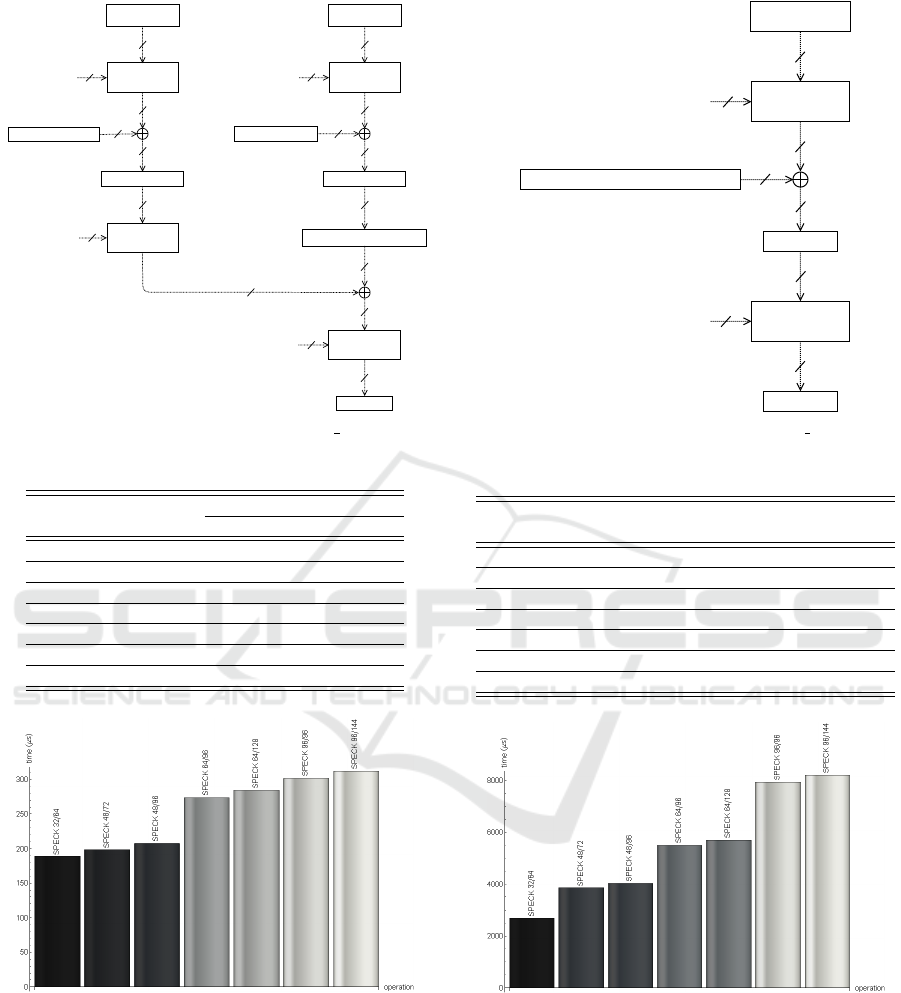
Confidentiality and Integrity. The proposed proto-
col ensures confidentiality and integrity of TPMS RF
transmissions by encrypting the messages and con-
catenating a three-byte MAC. Depending on the im-
plementation requirements, we distinguish between
two different scenarios. The first scenario corre-
sponds to the situation in which the message length
exceeds the block size (of the block cipher), thus an
additional block is required for computing the MAC,
i.e., CBC-MAC. This scenario is illustrated in Fig-
ure 8. In the second scenario, the entire message fits
in the block cipher thus the MAC can be computed
by simply encrypting the ciphertext with the authenti-
cation key. The second situation is illustrated in Fig-
ure 9.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
30
COUNTER
SPECK32_64
Ciphertext Block 1
Encryption Key
SPECK32_64Authentication Key
32
64
32
32
32
64
COUNTER
SPECK32_64Encryption Key
SPECK32_64Authentication Key
32
64
32
32
32
32
64
32
8
32
MAC
32
ID || TEMP || PRESS
FLAGS || 0x000000
CT Block 0 MSB || 0xFFFFFF
32
Ciphertext Block 0
Figure 8: Encryption with SPECK32 64.
Table 3: Execution time of Speck variants.
Block size Key size Execution time (µs)
(bits) (bits) S12XF512 PIC16F684
32 64 188.6 2693
48 72 198.6 3854
48 96 207.6 4044
64 96 273.6 5494
64 128 284.0 5697
96 96 301.8 7934
96 144 312.2 8217
Figure 10: Encryption time with SPECK on S12.
3.4 Performance Evaluation
Execution Time. We now evaluate the performance of
the employed platforms in executing the underlying
cryptographic algorithms. Table 3 presents the exe-
cution times of different variants of SPECK (various
combinations of block and key size) on the S12XF512
and PIC16F684. Figures 10 and 11 give a graphic
summary of the encryption time on both controllers.
COUNTER
SPECK48_96
Ciphertext
Encryption Key
SPECK48_96Authentication Key
48
96
48
48
48
96
48
ID || TEMP || PRESS || FLAGS || 0x00
MAC
48
Figure 9: Encryption with SPECK48 96.
Table 4: Memory utilization for PIC16F684.
Block size Key size Flash RAM EEPROM
(bits) (bits) (bytes) (bytes) (bytes)
32 64 44 7 44
48 72 60 9 66
48 96 60 9 69
64 96 76 11 104
64 128 76 11 108
96 96 112 15 168
96 144 112 15 174
Figure 11: Encryption time with SPECK on PIC.
Memory Utilization. Given the reduced memory
available on sensor devices we address the issue of
memory consumption with a memory-optimized im-
plementation of SPECK on the PIC16F684. Mem-
ory optimization for SPECK is presented in (Beaulieu
et al., 2015) as a trade-off between FLASH and RAM
consumption. Our objective is to minimize both pro-
gram and data memory usage by optimizing the algo-
rithms in assembly and taking advantage of the avail-
Security for Low-end Automotive Sensors: A Tire-pressure and Rain-light Sensors Case Study
31
CP TP
Figure 12: Power consumption: no se-
curity.
CP TP
Figure 13: Power consumption:
SPECK 32/64.
CP TP
Figure 14: Power consumption:
SPECK 48/96.
able EEPROM memory. The encryption algorithm is
straightforward and there is little space for optimiza-
tion. In contrast, the key expansion stage which is
performed before every encryption can be skipped.
During this stage, the secret key for encryption is ex-
panded into round keys to be used in the encryption
stage. By pre-expanding and storing the round keys
in EEPROM, the key expansion stage is avoided, thus
reducing the amount of RAM and FLASH memory
used. Table 4 lists the memory consumption of our
implementations of various SPECK variants on the
PIC16F684. The last column is fully represented by
the round keys stored in EEPROM.
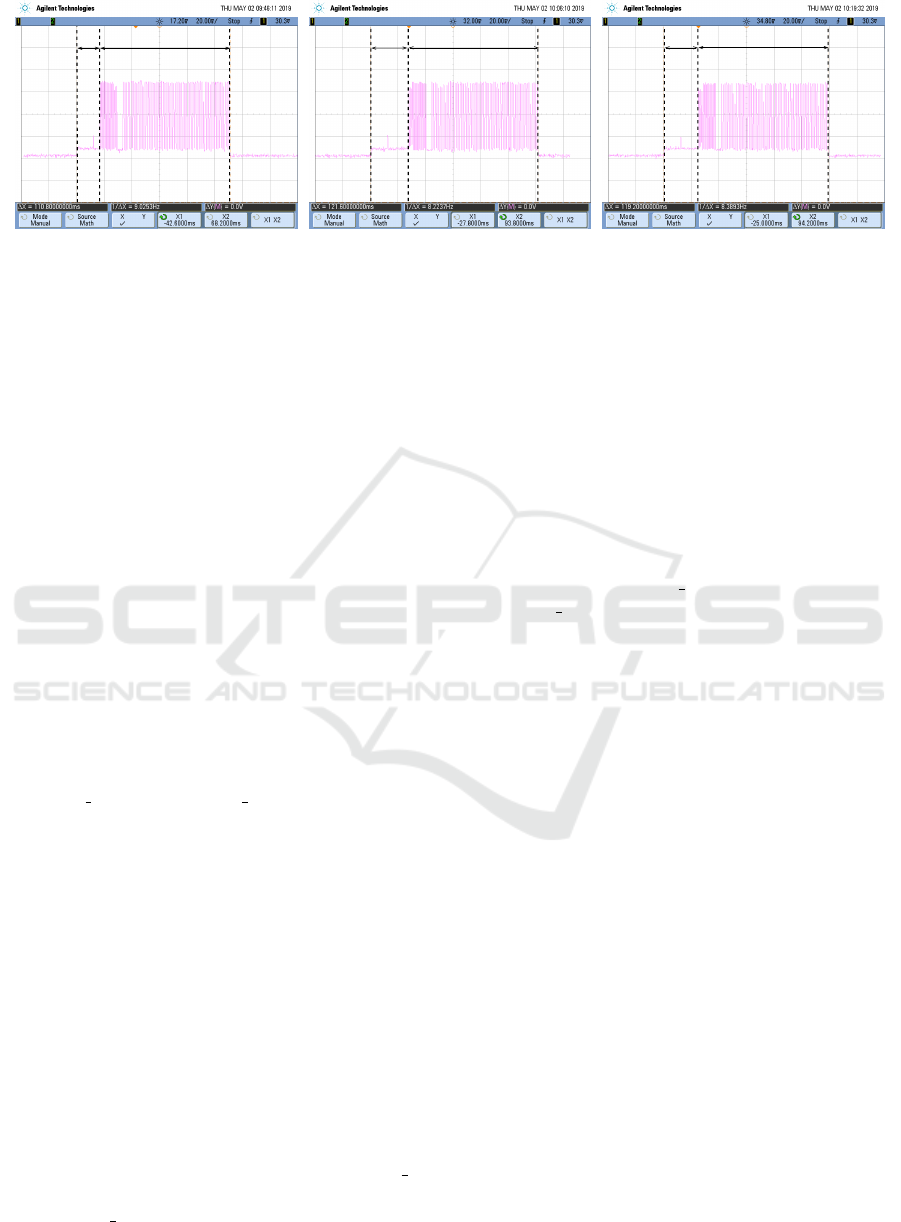
Power Consumption. Due to their in-wheel position-
ing, TPMS sensors are powered by batteries. Usu-
ally, the expected time before battery drain is up
to seven years, thus minimizing energy increase is
mandatory. Figure 12 illustrates the power consump-
tion plot of Microchip’s TPMS sensor, before adding
security measures. After augmenting regular data
transmission with the security protocol, based on both
SPECK32 64 and SPECK48 96 block ciphers, the
power consumption graph modifies as depicted in
Figure 13 and Figure 14 (note that the computational
time expands). The overall power consumption can
be divided into two major phases, i.e., Computation
Phase (CP) and Transmission Phase (TP).
The computational phase CP starts when the pro-
cessor exits low-power mode and during this phase,
sensor measurements, encryption and MAC computa-
tions are performed. Peak value is reached when the
actual sensor is powered during pressure and temper-
ature measurements and can be visually observed as
a spike in all plots. The power consumption is dic-
tated by the processor’s operational power require-
ment and the average instantaneous value measured
by us was 402 micro-watts. Comparing the CP dura-
tions we find increases of 65.8% in the SPECK32
64
based implementation and 50% in the variant based
on SPECK48 96 (note however that power consump-
tion is small compared to the transmission phase TP).
Using a larger block, i.e., 48 vs. 32, to avoid an addi-
tional encryption block leads to lower computational
time thus to lower power consumption. The second
phase (TP) is marked by a dramatic increase of the
plot amplitude. During this phase the message is sent
via RF thus the antenna must be powered. By per-
forming again the same measurement for the average
power consumption, we obtain 1284 micro-watts. Be-
cause we used the same packet length of 8 bytes, the
duration of TP is the same in all three cases. Us-
ing calculus to approximate the power consumption
penalty for both cases, we estimate an overall increase
of 3.3% for the SPECK32 64 variant and 2.5% for the
SPECK48 96 variant. This shows that our security
protocol does not impact the battery life significantly.
4 CONCLUSIONS
In this work we have analyzed the security of low-end
vehicle sensors and proposed a cryptographic proto-
col that is able to assure both privacy and security.
To prove feasibility, we made a proof-of-concept im-
plementation on a TPMS kit from Microchip. Our
protocol makes use of the lightweight SPECK cipher
and assures security by encrypting the data-field and
by using a CBC MAC. Performance results are dis-
cussed for several version of the cipher. Since TPMS
systems usually rely on internal batteries that cannot
be changed, we also present results on energy con-
sumption which prove that the solution is not pro-
hibitive w.r.t. small batteries on such sensors. Similar
lightweight security mechanisms can be used for low-
end RLS sensors. Our after-market RLS sensor was
not programmable, but it has superior characteristics
to the TPMS sensor that we used and thus the pro-
posed solution can be deployed in a straight-forward
manner. While current RLS sensors are wired to LIN
bus, we argue that RF communication in RLS may
become a future option to reduce wiring.
PECCS 2019 - 9th International Conference on Pervasive and Embedded Computing and Communication Systems
32

ACKNOWLEDGEMENTS
We thank the reviewers for helpful comments that
improved our work. This work was supported by a
grant of Ministry of Research and Inovation, CNCS-
UEFISCDI, project number PN-III-P1-1.1-TE-2016-
1317, within PNCDI III (2018-2020).
REFERENCES
AUTOSAR (2015a). Specification of Crypto Abstraction
Library, 4.2.2 edition.
AUTOSAR (2015b). Specification of Crypto Service Man-
ager, 4.2.2 edition.
AUTOSAR (2017). Specification of Secure Onboard Com-
munication, 4.3.1 edition.
Beaulieu, R., Treatman-Clark, S., Shors, D., Weeks,
B., Smith, J., and Wingers, L. (2015). The si-
mon and speck lightweight block ciphers. In 2015
52nd ACM/EDAC/IEEE Design Automation Confer-
ence (DAC), pages 1–6. IEEE.
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., Savage, S., Koscher, K., Czeskis, A.,
Roesner, F., Kohno, T., et al. (2011). Comprehensive
experimental analyses of automotive attack surfaces.
In USENIX Security Symposium. San Francisco.
Ergen, S. C. and Sangiovanni-Vincentelli, A. (2017). In-
travehicular energy-harvesting wireless networks: Re-
ducing costs and emissions. IEEE Vehicular Technol-
ogy Magazine, 12(4):77–85.
Ishtiaq Roufa, R. M., Mustafaa, H., Travis Taylora, S. O.,
Xua, W., Gruteserb, M., Trappeb, W., and Seskarb,
I. (2010). Security and privacy vulnerabilities of in-
car wireless networks: A tire pressure monitoring sys-
tem case study. In 19th USENIX Security Symposium,
Washington DC, pages 11–13.
Koscher, K., Czeskis, A., Roesner, F., Patel, S., Kohno,
T., Checkoway, S., McCoy, D., Kantor, B., Anderson,
D., Shacham, H., et al. (2010). Experimental security
analysis of a modern automobile. In Security and Pri-
vacy (SP), 2010 IEEE Symposium on, pages 447–462.
IEEE.
Krawczyk, H., Bellare, M., and Canetti, R. (1997). Hmac:
Keyed-hashing for message authentication. Technical
report.
Miller, C. and Valasek, C. (2014). A survey of remote auto-
motive attack surfaces. Black Hat USA.
Solomon, C. and Groza, B. (2015). Limon - lightweight
authentication for tire pressure monitoring sensors. In
1st Workshop on the Security of Cyber-Physical Sys-
tems (affiliated to ESORICS 2015).
Takahashi, J., Aragane, Y., Miyazawa, T., Fuji, H., Ya-
mashita, H., Hayakawa, K., Ukai, S., and Hayakawa,
H. (2017). Automotive attacks and countermea-
sures on lin-bus. Journal of Information Processing,
25:220–228.
Toth, A. (2014). Method and system for monitoring a
parameter of a tire of a vehicle. EP Patent App.
EP20,120,464,019.
van Zyl, P., Goethem, S. v., Jansen, S., Kanarchos, S., Rex-
eis, M., Hausberger, S., and Smokers, R. (2013). Study
on tyre pressure monitoring systems (tpms) as a means
to reduce light-commercial and heavy-duty vehicles
fuel consumption and CO2 emissions. Delft: TNO.
Xu, M., Xu, W., Walker, J., and Moore, B. (2013).
Lightweight secure communication protocols for in-
vehicle sensor networks. In Proceedings of the 2013
ACM workshop on Security, privacy & dependability
for cyber vehicles, pages 19–30. ACM.
Yan, C., Xu, W., and Liu, J. (2016). Can you trust au-
tonomous vehicles: Contactless attacks against sen-
sors of self-driving vehicle. DEF CON, 24.
Security for Low-end Automotive Sensors: A Tire-pressure and Rain-light Sensors Case Study
33
