
Fault Detection of Elevator System using Deep Autoencoder Feature
Extraction for Acceleration Signals
Krishna Mohan Mishra and Kalevi J. Huhtala
Unit of Automation Technology and Mechanical Engineering, Tampere University, Tampere, Finland
Keywords:
Elevator System, Deep Autoencoder, Fault Detection, Feature Extraction, Random Forest.
Abstract:
In this research, we propose a generic deep autoencoder model for automatic calculation of highly informative
deep features from the elevator time series data. Random forest algorithm is used for fault detection based on
extracted deep features. Maintenance actions recorded are used to label the sensor data into healthy or faulty.
Avoiding false positives are performed with the rest of the healthy data in terms of validation of the model to
prove its efficacy. New extracted deep features provide 100% accuracy in fault detection along with avoiding
false positives, which is better than existing features. Random forest was also used to detect faults based on
existing features to compare results. New deep features extracted from the dataset with deep autoencoder
random forest outperform the existing features. Good classification and robustness against overfitting are key
characteristics of our model. This research will help to reduce unnecessary visits of service technicians to
installation sites by detecting false alarms in various predictive maintenance systems.
1 INTRODUCTION
In recent years, apartments, commercial facilities and
office buildings are using elevator systems more ex-
tensively. Nowadays, urban areas comprised of 54%
of the world’s population (Desa, 2014). Therefore,
proper maintenance and safety are required by ele-
vator systems. Development of predictive and pre-
emptive maintenance strategies will be the next step
for improving the safety of elevator systems, which
will also increase the lifetime and reduce repair costs
whilst maximizing the uptime of the system (Ebeling,
2011), (Ebeling and Haul, 2016). Predictive mainte-
nance policy are now being opted by elevator produc-
tion and service companies for providing better ser-
vice to customers. They are estimating the remaining
lifetime of the components responsible for faults and
remotely monitoring faults in elevators. Fault detec-
tion and diagnosis are required by elevator systems
for healthy operation (Wang et al., 2009).
State of the art include fault diagnosis methods
having feature extraction methodologies based on
deep neural networks (Zhang et al., 2017), (Jia et al.,
2016), (Bulla et al., 2018) and convolutional neural
networks (Xia et al., 2018), (Jing et al., 2017) for ro-
tatory machines similar to elevator systems. Fault de-
tection methods for rotatory machines are also using
support vector machines (Mart
´
ınez-Rego et al., 2011)
and extreme learning machines (Yang and Zhang,
2016). However, to improve the performance of tra-
ditional fault diagnosis methods, we have developed
an intelligent deep autoencoder model for feature ex-
traction from the data and random forest performs the
fault detection in elevator systems based on extracted
features.
In the last decade, highly meaningful statistical
patterns have extracted with neural networks (Cal-
imeri et al., ) from large-scale and high-dimensional
datasets. Elevator ride comfort has also been im-
proved via speed profile design using neural networks
(Seppala et al., 1998). Nonlinear time series model-
ing (Lee, 2014) is one of the successful application
of neural networks. Relevant features can be self-
learned from multiple signals using a deep learning
network (Fern
´
andez-Varela et al., ). Deep learning al-
gorithms are frequently used in areas such as knowl-
edge engineering (Mohamed et al., 2017), text anal-
ysis (Chatterjee and Bhardwaj, 2010), ontology de-
velopment (Alkhatib et al., 2017), intelligent trans-
portation (Hina et al., 2017) and data analysis (Hen-
riques and Stacey, 2012). Autoencoding is a pro-
cess based on feedforward neural network (H
¨
anninen
and K
¨
arkk
¨
ainen, 2016) for nonlinear dimension re-
duction with natural transformation architecture. Au-
toencoders (Albuquerque et al., 2018) are very power-
ful as nonlinear feature extractors. Autoencoders can
336
Mishra, K. and Huhtala, K.
Fault Detection of Elevator System using Deep Autoencoder Feature Extraction for Acceleration Signals.
DOI: 10.5220/0008347403360342
In Proceedings of the 11th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2019), pages 336-342
ISBN: 978-989-758-382-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
extract features of high interest from sensor data for
increasing the generalization ability of machine learn-
ing models (Huet et al., 2016). Autoencoders have
been studied for decades and were first introduced
by LeCun (Fogelman-Soulie et al., 1987). Tradition-
ally, autoencoders have two main features i.e. fea-
ture learning and dimensionality reduction. Autoen-
coders and latent variable models (Madani and Vlajic,
2018) are theoretically related, which promotes them
to be considered as one of the most compelling sub-
space analysis techniques. Feature extraction method
based on autoencoders are used in systems like induc-
tion motor (Sun et al., 2016) and wind turbines (Jiang
et al., 2018) for fault detection, different from elevator
systems as in our research.
In our previous research, elevator key perfor-
mance and ride quality features were calculated from
mainly acceleration signals of raw sensor data, which
we call here existing features. Random forest has
classified these existing features to detect faults. Ex-
pert knowledge of the domain is required to calcu-
late existing domain specific features from raw sensor
data but there will be loss of information to some ex-
tent. To avoid these implications, an automated fea-
ture extraction technique based on deep autoencoder
approach is developed for raw sensor data in all x,
y and z directions and random forest is used to de-
tect faults based on these deep features. The rest of
this paper is organized as follows. Section 2 presents
the methodology of the paper including deep autoen-
coder and random forest algorithms. Then, section 3
includes the details of experiments performed, results
and discussion. Finally, section 4 concludes the paper
and presents the future work.
2 METHODOLOGY
In this research, we have used 12 different existing
features describing the motion and vibration of an el-
evator. These features are derived from raw sensor
data for fault detection and diagnostics of multiple
faults. In this research, as an extension to the work
of our previous research (Mishra and Huhtala, 2019),
we have developed an automated feature extraction
technique for raw sensor data, to compare the results
using new extracted deep features. We have analyzed
almost one week of the data from one traction elevator
in this research. Around 200 rides per day are usually
produced by an elevator. Robustness of the algorithm
is tested by large dataset because each ride includes
around 5000 rows of the data. Data is divided into two
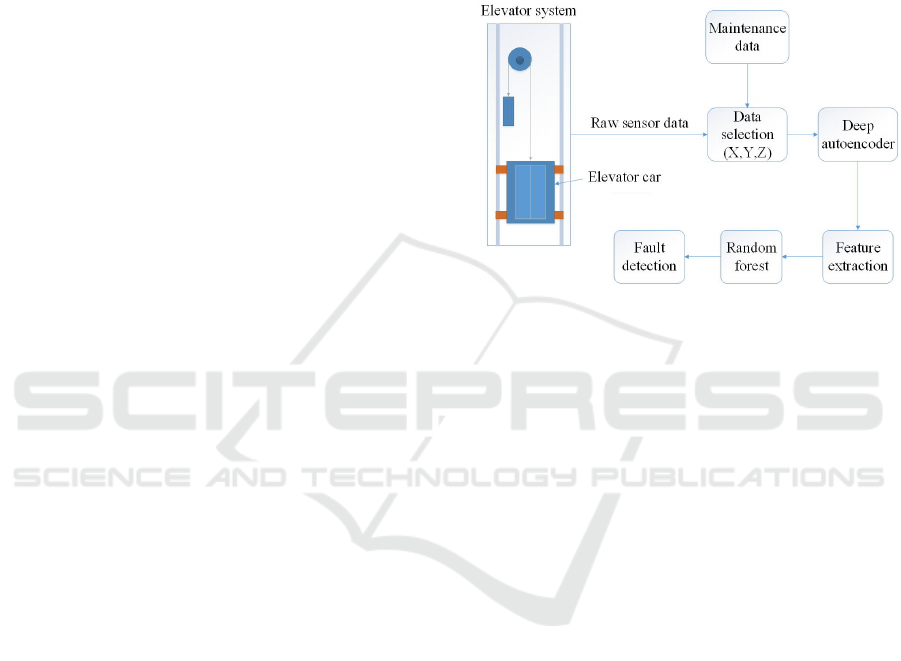
parts 70% for training and rest 30% for testing. Figure
1 shows the fault detection approach used in this pa-
per, which includes raw sensor data in all x, y and z di-
rections extracted based on time periods provided by
the maintenance data. Data collected from an elevator
system is fed to the deep autoencoder model for fea-
ture extraction and then random forest performs the
fault detection task based on extracted deep features.
We are extracting features from all the three x, y and
z components of the acceleration signals, which is as
an extension to the work of our previous research.
Figure 1: Fault detection approach.
2.1 Deep Autoencoder
We have developed a deep autoencoder model based
on deep learning autoencoder feature extraction
methodology. A basic autoencoder is built on feed-
forward neural network with a fully connected three-
layer network including one hidden layer. Input and
output layer of a typical autoencoder have same num-
ber of neurons and reproduces output as its inputs. We
are using a five layer deep autoencoder (see Figure 2)
including input, output, encoder, decoder and repre-
sentation layers, which is a different approach than in
(Jiang et al., 2018), (Vincent et al., 2008). In our ap-
proach, we first analyze the data to find the most fre-
quent floor pattern and then feed the segmented raw
sensor data windows in up and down directions sep-
arately to the deep autoencoder model to extract new
deep features from the raw data. Lastly, we apply ran-
dom forest as a classifier for fault detection based on
new deep features extracted from the data.
The encoder transforms the input x into corrupted
input data x
’
using hidden representation h through
nonlinear mapping
h = f (W
1
x
’
+ b) (1)
where f(.) is a nonlinear activation function as
the sigmoid function, W
1
∈ R
k×m
is the weight ma-
trix and b ∈ R
k
the bias vector to be optimized in
encoding with k nodes in the hidden layer (Vincent
et al., 2008). Then, with parameters W
2
∈ R
m×k
and
Fault Detection of Elevator System using Deep Autoencoder Feature Extraction for Acceleration Signals
337

Figure 2: Deep autoencoder feature extraction approach
(Acc represents acceleration signal).
c ∈ R
m
, the decoder uses nonlinear transformation to
map hidden representation h to a reconstructed vector
x
”
at the output layer.
x
”
= g(W
2
h + c) (2)
where g(.) is again nonlinear function (sigmoid
function). In this study, the weight matrix is W
2
=W
1
T
,
which is tied weights for better learning performance
(Japkowicz et al., 2000).
2.2 Random Forest
Random forest is type of ensemble classifier selecting
a subset of training samples and variables randomly
to produce multiple decision trees (Breiman, 2001).
High data dimensionality and multicollinearity can be
handled by a RF classifier while imbalanced data af-
fect the results of the RF classifier. It can also be used
for sample proximity analysis, i.e. outlier detection
and removal in train set (Belgiu and Dr
˘
agut¸, 2016).
The final classification accuracy of RF is calculated
by averaging the probabilities of assigning classes re-
lated to all produced trees (t). Testing data (d) that
is unknown to all the decision trees is used for eval-
uation by voting method. Selection of the class is
based on the maximum number of votes (see Figure
3). Random forest classifier provides variable impor-
tance measurement that helps in reducing the dimen-
sions of hyperspectral data in order to identify the
most relevant features of data, and helps in selecting
the most suitable reason for classification of a certain
target class.
Specifically, let sensor data value v
l
t
have training
sample l
th
in the arrived leaf node of the decision tree
t ∈ T , where l ∈ [1, ..., L
t
] and the number of train-
ing samples is L
t
in the current arrived leaf node of
decision tree t. The final prediction result is given by
(Huynh et al., 2016):
µ =
∑
t∈T
∑
l∈[1,...,L
t
]
v
l
t
∑
t∈T
L
t
(3)
Figure 3: Classification phase of random forest classifier.
All classification trees providing a final decision
by voting method are given by (Liu et al., 2017):
H(a) = argmax
y
j
∑
i∈[1,2,...,Z]
I(h
i
(a) = y
j
) (4)
where j= 1,2,...,C and the combination model is
H(a) , the number of training subsets are Z depending
on which decision tree model is h
i
(a) , i ∈ [1, 2, ..., Z]
while output or labels of the P classes are y
j
, j=
1,2,...,P and combined strategy is I(.) defined as:
I(x) =
(
1, h
i
(a) = y
j
0, otherwise
(5)
where output of the decision tree is h
i
(a) and i
th
class label of the P classes is y
j
, j= 1,2,...,P .
2.3 Evaluation Parameters
Evaluation parameters used in this research are de-
fined with the confusion matrix in Table 1.
The rate of positive test result is sensitivity,
Sensitivity =
T P
T P + FN
× 100% (6)
The ratio of a negative test result is specificity,
Specificity =
T N
T N + FP
× 100% (7)
The overall measure is accuracy,
Accuracy =
T P + T N
T P + FP + T N + FN
× 100% (8)
KEOD 2019 - 11th International Conference on Knowledge Engineering and Ontology Development
338
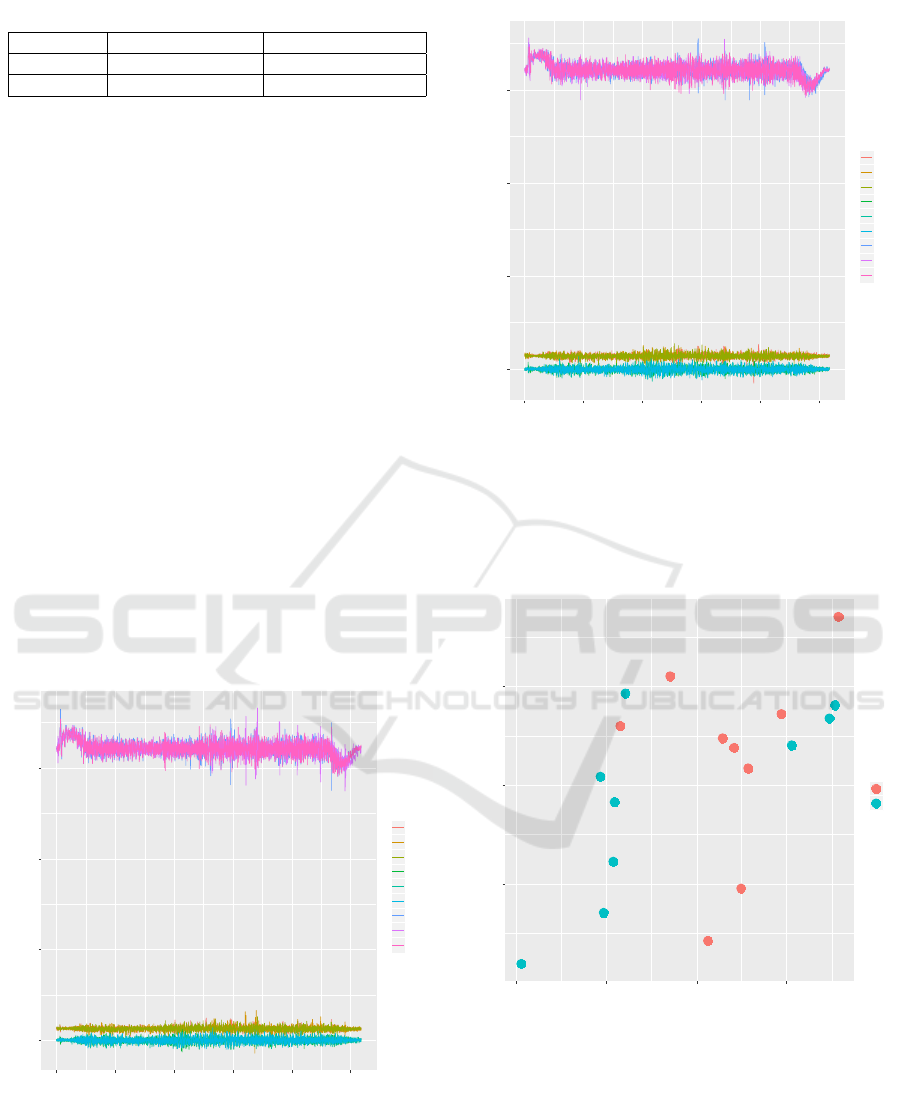
Table 1: Confusion matrix.
Predicted (P) (N)
Actual (P) True positive (TP) False negative (FN)
(N) False positive (FP) True negative (TN)
3 RESULTS AND DISCUSSION
In this research, first, we selected the most frequent
floor patterns from the data, i.e. floor patterns which
consist of the maximum number of rides between spe-
cific floor combinations. The next step includes the
selection of faulty rides in all x, y and z directions
from the most frequent floor patterns based on time
periods provided by the maintenance data. An equal
amount of healthy rides are also selected and labelled
as class 0 for healthy, with class 1 for faulty rides. Fi-
nally, the deep autoencoder model is used for feature
extraction from the data.
3.1 Up Movement
We have analyzed up and down movements separately
because the traction based elevator usually produces
slightly different levels of vibration in each direction.
First, we have selected the floor patterns 0 to 6 and
faulty rides based on time periods provided by the
maintenance data as shown in Figure 4.
0
3000
6000
9000
0 1000 2000 3000 4000 5000
Samples
Acc all directions
variable
V1
V2
V3
V4
V5
V6
V7
V8
V9
Faulty rides (floor:0-6)
Figure 4: Rides from faulty data.
Then, we have selected an equal number of rides
for healthy data, as shown in Figure 5. The next
step is to label both the healthy and faulty rides with
class labels 0 and 1 respectively. Healthy and faulty
rides with class labels are fed to the deep autoencoder
0
3000
6000
9000
0 1000 2000 3000 4000 5000
Samples
Acc all directions
variable
V1
V2
V3
V4
V5
V6
V7
V8
V9
Healthy rides (floor:0-6)
Figure 5: Rides from healthy data.
model and the generated deep features are shown in
Figure 6. These are called as deep features or la-
tent features in deep autoencoder terminology, which
shows hidden representations of the data. The ex-
-0.4
0.0
0.4
-0.6 -0.3 0.0 0.3
Feature axis 1
Feature axis 2
class
0
1
Deep features (floor:0-6)
Figure 6: Extracted deep autoencoder features (visualiza-
tion of the features w.r.t class variable).
tracted deep features are fed to the random forest
algorithm for classification and the results provide
100% accuracy in fault detection, as shown in Table
2. We have also calculated accuracy in terms of avoid-
ing false positives from both features and found that
the new deep features generated in this research out-
perform the existing features. We have used the rest
of the healthy rides similar as Figure 5 to analyze the
Fault Detection of Elevator System using Deep Autoencoder Feature Extraction for Acceleration Signals
339
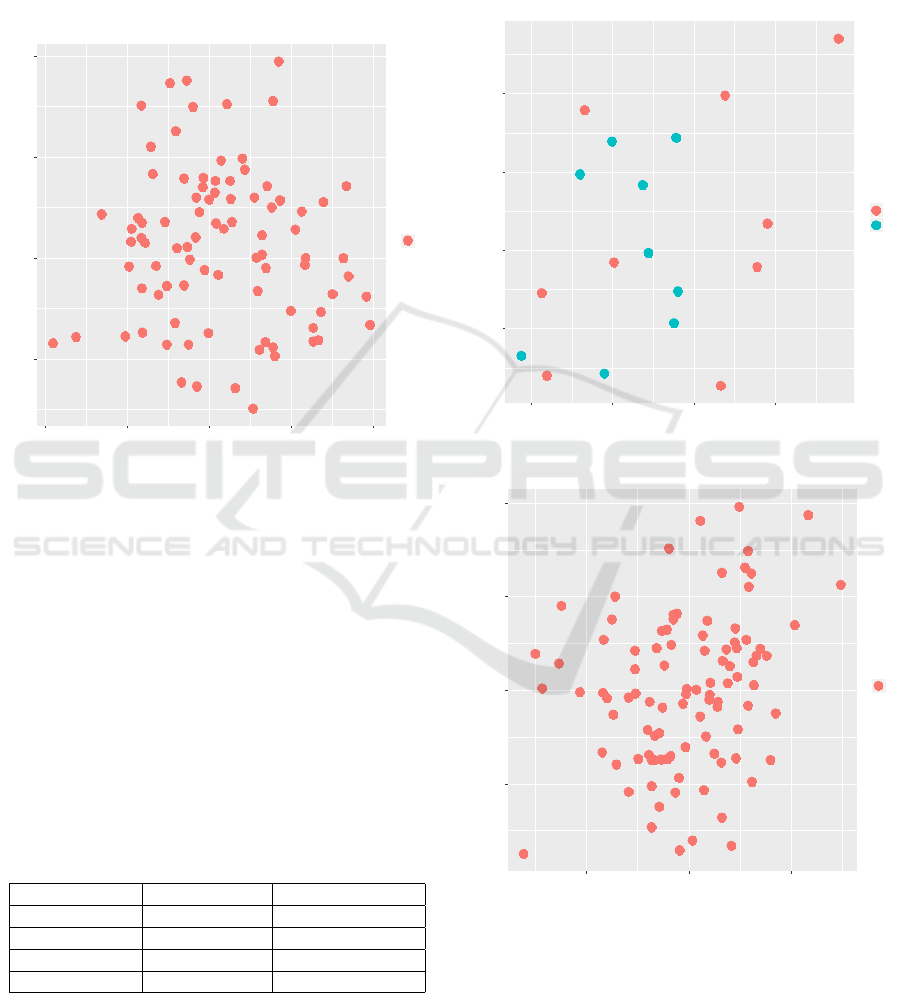
number of false positives. These healthy rides are la-
belled as class 0 and fed to the deep autoencoder to
extract new deep features from the data, as presented
in Figure 7. These new deep features are then clas-
sified with the pre-trained deep autoencoder random
forest model to test the efficacy of the model in terms
of false positives.
-0.3
0.0
0.3
0.6
-0.6 -0.3 0.0 0.3 0.6
Feature axis 1
Feature axis 2
class
0
Features from rest of the healthy rides (floor:0-6)
Figure 7: Extracted deep features (only healthy rides).
Table 2 presents the results for upward movement
of the elevator in terms of accuracy, sensitivity and
specificity. We have also included the accuracy of
avoiding false positives as evaluation parameters for
this research. The results show that the new deep
features provide better accuracy in terms of avoid-
ing false positives from the data, which is helpful in
detecting false alarms for elevator predictive main-
tenance strategies. False positives equal to 1 means
100% detection of healthy data, which means no false
alarms. It is extremely helpful in reducing the unnec-
essary visits of maintenance personnel to installation
sites.
Table 2: Fault detection analysis (False positives field re-
lated to analyzing rest of the healthy rides after the training
and testing phase).
Deep features Existing features
Accuracy 1 1
Sensitivity 1 1
Specificity 1 1
False positives 1 0.88
3.2 Down Movement
For downward motion, just as in the case of up move-
ment, we feed both healthy and faulty rides with class
labels to the deep autoencoder model for the extrac-
tion of new deep features, as shown in Figure 8.
-0.2
0.0
0.2
0.4
-0.6 -0.3 0.0 0.3
Feature axis 1
Feature axis 2
class
0
1
Deep features (floor:6-0)
Figure 8: Extracted deep features.
-0.3
0.0
0.3
0.6
-0.4 0.0 0.4
Feature axis 1
Feature axis 2
class
0
Features from rest of the healthy rides (floor:6-0)
Figure 9: Extracted deep features (only healthy rides).
Finally, the new extracted deep features are clas-
sified with random forest model, and the results are
shown in Table 3. After this, the rest of the healthy
rides with class label 0 is used to analyze the num-
ber of false positives. The extracted deep features are
presented in Figure 9.
Table 3 presents the results for fault detection with
KEOD 2019 - 11th International Conference on Knowledge Engineering and Ontology Development
340

deep autoencoder random forest model in the down-
ward direction. The results are similar to the upward
direction, but we can see significant change in terms
of accuracy when analyzing the number of false posi-
tives with new deep features.
Table 3: Fault detection analysis.
Deep features Existing features
Accuracy 1 1
Sensitivity 1 1
Specificity 1 1
False positives 1 0.52
4 CONCLUSIONS AND FUTURE
WORK
In this research, we propose a novel fault detection
technique for health monitoring of elevator systems.
We have developed a generic model for automated
feature extraction and fault detection in the health
state monitoring of elevator systems. Our approach
with new extracted deep features provided 100% ac-
curacy in detecting faults and in avoiding false pos-
itives. The results show that we have succeeded in
developing a generic model, which can also be appli-
cable to other machine systems for automated feature
extraction and fault detection. The results are useful
in terms of detecting false alarms in elevator predic-
tive maintenance. If the analysis results are utilized
to allocate maintenance resources, the approach will
also reduce unnecessary visits of maintenance person-
nel to installation sites. Our developed model can also
be used for solving diagnostics problems with auto-
matically generated highly informative deep features
in different predictive maintenance solutions. New
deep features extracted by our model outperforms the
existing features calculated from the same raw sensor
dataset. No prior domain knowledge is required for
the automated feature extraction approach. Robust-
ness against overfitting and dimensionality reduction
are the two main characteristics of our model. Our
generic model is feasible as shown by the experimen-
tal results, which will increase the safety of passen-
gers. Robustness of our model is tested in the case
of a large dataset, which proves the efficacy of our
model.
In future work, we will extend our approach on
more elevators including multiple floor patterns and
real-world big data cases to validate its potential for
other applications and improve its efficacy.
REFERENCES
Albuquerque, A., Amador, T., Ferreira, R., Veloso, A., and
Ziviani, N. (2018). Learning to rank with deep autoen-
coder features. In 2018 International Joint Conference
on Neural Networks (IJCNN), pages 1–8. IEEE.
Alkhatib, W., Herrmann, L. A., and Rensing, C. (2017).
Onto. kom-towards a minimally supervised ontology
learning system based on word embeddings and con-
volutional neural networks. In KEOD, pages 17–26.
Belgiu, M. and Dr
˘
agut¸, L. (2016). Random forest in remote
sensing: A review of applications and future direc-
tions. ISPRS Journal of Photogrammetry and Remote
Sensing, 114:24–31.
Breiman, L. (2001). Random forests. Machine learning,
45(1):5–32.
Bulla, J., Orjuela-Ca
˜
n
´
on, A. D., and Fl
´
orez, O. D. (2018).
Feature extraction analysis using filter banks for faults
classification in induction motors. In 2018 Interna-
tional Joint Conference on Neural Networks (IJCNN),
pages 1–6. IEEE.
Calimeri, F., Marzullo, A., Stamile, C., and Terracina, G.
Graph based neural networks for automatic classifica-
tion of multiple sclerosis clinical courses. In Proceed-
ings of the European Symposium on Artificial Neural
Networks, Computational Intelligence and Machine
Learning (ESANN 18)(2018, forthcoming).
Chatterjee, N. and Bhardwaj, A. (2010). Single document
text summarization using random indexing and neural
networks. In KEOD, pages 171–176.
Desa (2014). World urbanization prospects, the 2011 revi-
sion. Population Division, Department of Economic
and Social Affairs, United Nations Secretariat.
Ebeling, T. (2011). Condition monitoring for elevators–an
overview. Lift Report, 6:25–26.
Ebeling, T. and Haul, M. (2016). Results of a field trial aim-
ing at demonstrating the permanent detection of ele-
vator wear using intelligent sensors. In Proc. ELEV-
CON, pages 101–109.
Fern
´
andez-Varela, I., Athanasakis, D., Parsons, S.,
Hern
´
andez-Pereira, E., and Moret-Bonillo, V. Sleep
staging with deep learning: a convolutional model.
In Proceedings of the European Symposium on Artifi-
cial Neural Networks, Computational Intelligence and
Machine Learning (ESANN 2018).
Fogelman-Soulie, F., Robert, Y., and Tchuente, M. (1987).
Automata networks in computer science: theory and
applications. Manchester University Press and Prince-
ton University Press.
H
¨
anninen, J. and K
¨
arkk
¨
ainen, T. (2016). Comparison
of four-and six-layered configurations for deep net-
work pretraining. In European Symposium on Artifi-
cial Neural Networks, Computational Intelligence and
Machine Learning.
Henriques, G. and Stacey, D. A. (2012). An ontology-based
framework for syndromic surveillance method selec-
tion. In KEOD, pages 396–400.
Hina, M. D., Thierry, C., Soukane, A., and Ramdane-
Cherif, A. (2017). Ontological and machine learning
Fault Detection of Elevator System using Deep Autoencoder Feature Extraction for Acceleration Signals
341

approaches for managing driving context in intelligent
transportation. In KEOD, pages 302–309.
Huet, R., Courty, N., and Lef
`
evre, S. (2016). A new penal-
isation term for image retrieval in clique neural net-
works. In European Symposium on Artificial Neural
Networks, Computational Intelligence and Machine
Learning (ESANN).
Huynh, T., Gao, Y., Kang, J., Wang, L., Zhang, P., Lian,
J., and Shen, D. (2016). Estimating ct image from
mri data using structured random forest and auto-
context model. IEEE transactions on medical imag-
ing, 35(1):174.
Japkowicz, N., Hanson, S. J., and Gluck, M. A. (2000).
Nonlinear autoassociation is not equivalent to pca.
Neural computation, 12(3):531–545.
Jia, F., Lei, Y., Lin, J., Zhou, X., and Lu, N. (2016). Deep
neural networks: A promising tool for fault character-
istic mining and intelligent diagnosis of rotating ma-
chinery with massive data. Mechanical Systems and
Signal Processing, 72:303–315.
Jiang, G., Xie, P., He, H., and Yan, J. (2018). Wind turbine
fault detection using a denoising autoencoder with
temporal information. IEEE/ASME Transactions on
Mechatronics, 23(1):89–100.
Jing, L., Wang, T., Zhao, M., and Wang, P. (2017). An adap-
tive multi-sensor data fusion method based on deep
convolutional neural networks for fault diagnosis of
planetary gearbox. Sensors, 17(2):414.
Lee, C.-C. (2014). Gender classification using m-estimator
based radial basis function neural network. In Signal
Processing and Multimedia Applications (SIGMAP),
2014 International Conference on, pages 302–306.
IEEE.
Liu, Z., Tang, B., He, X., Qiu, Q., and Liu, F. (2017).
Class-specific random forest with cross-correlation
constraints for spectral–spatial hyperspectral image
classification. IEEE Geoscience and Remote Sensing
Letters, 14(2):257–261.
Madani, P. and Vlajic, N. (2018). Robustness of deep
autoencoder in intrusion detection under adversarial
contamination. In Proceedings of the 5th Annual Sym-
posium and Bootcamp on Hot Topics in the Science of
Security, page 1. ACM.
Mart
´
ınez-Rego, D., Fontenla-Romero, O., and Alonso-
Betanzos, A. (2011). Power wind mill fault detection
via one-class ν-svm vibration signal analysis. In Neu-
ral Networks (IJCNN), The 2011 International Joint
Conference on, pages 511–518. IEEE.
Mishra, K. M. and Huhtala, K. (2019). Fault detection of el-
evator systems using multilayer perceptron neural net-
work. In 24th IEEE Conference on Emerging Tech-
nologies and Factory Automation (ETFA). IEEE.
Mohamed, R., El-Makky, N. M., and Nagi, K. (2017). Hy-
bqa: Hybrid deep relation extraction for question an-
swering on freebase. In KEOD, pages 128–136.
Seppala, J., Koivisto, H., and Koivo, H. (1998). Modeling
elevator dynamics using neural networks. In Neural
Networks Proceedings, 1998. IEEE World Congress
on Computational Intelligence. The 1998 IEEE Inter-
national Joint Conference on, volume 3, pages 2419–
2424. IEEE.
Sun, W., Shao, S., Zhao, R., Yan, R., Zhang, X., and Chen,
X. (2016). A sparse auto-encoder-based deep neural
network approach for induction motor faults classifi-
cation. Measurement, 89:171–178.
Vincent, P., Larochelle, H., Bengio, Y., and Manzagol, P.-
A. (2008). Extracting and composing robust features
with denoising autoencoders. In Proceedings of the
25th international conference on Machine learning,
pages 1096–1103. ACM.
Wang, P., He, W., and Yan, W. (2009). Fault diagnosis of
elevator braking system based on wavelet packet algo-
rithm and fuzzy neural network. In Electronic Mea-
surement & Instruments, 2009. ICEMI’09. 9th Inter-
national Conference on, pages 4–1028. IEEE.
Xia, M., Li, T., Xu, L., Liu, L., and de Silva, C. W.
(2018). Fault diagnosis for rotating machinery us-
ing multiple sensors and convolutional neural net-
works. IEEE/ASME Transactions on Mechatronics,
23(1):101–110.
Yang, Z.-X. and Zhang, P.-B. (2016). Elm meets rae-elm:
A hybrid intelligent model for multiple fault diagnosis
and remaining useful life predication of rotating ma-
chinery. In Neural Networks (IJCNN), 2016 Interna-
tional Joint Conference on, pages 2321–2328. IEEE.
Zhang, R., Peng, Z., Wu, L., Yao, B., and Guan, Y. (2017).
Fault diagnosis from raw sensor data using deep neu-
ral networks considering temporal coherence. Sen-
sors, 17(3):549.
KEOD 2019 - 11th International Conference on Knowledge Engineering and Ontology Development
342
