
Deep Semantic Feature Detection from Multispectral Satellite Images
Hanen Balti
1
, Nedra Mellouli
2
, Imen Chebbi
2
, Imed Riadh Farah
1
and Myriam Lamolle
2
1
RIADI Laboratory, University of Manouba, Manouba, Tunisia
2
LIASD Laboratory, University of Paris 8, Paris, France
Keywords:
Big Data, Remote Sensing, Feature Detection, CNN, Semantic Segmentation.
Abstract:
Recent progress in satellite technology has resulted in explosive growth in volume and quality of high-
resolution remote sensing images. To solve the issues of retrieving high-resolution remote sensing (RS) data
in both efficiency and precision, this paper proposes a distributed system architecture for object detection in
satellite images using a fully connected neural network. On the one hand, to address the issue of higher com-
putational complexity and storage ability, the Hadoop framework is used to handle satellite image data using
parallel architecture. On the other hand, deep semantic features are extracted using Convolutional Neural
Network (CNN),in order to identify objects and accurately locate them. Experiments are held out on several
datasets to analyze the efficiency of the suggested distributed system. Experimental results indicate that our
system architecture is simple and sustainable, both efficiency and precision can satisfy realistic requirements.
1 INTRODUCTION
Earth Observation (EO) is an approach of collecting
data about planet Earth through satellite imaging. The
location where we can obtain most of our planet’s data
is in orbit. Remote sensing (RS) satellite data pro-
cessing is one of the complicated tasks of image pro-
cessing since big, sophisticated data are processed.
It finds a huge of applications in fields such as me-
teorology, geology, forestry, seismology, oceanogra-
phy, etc. Datasets may contain images of distinct
sensors, distinct viewing angles and distinct viewing
times. Satellite images have distinctive issues such
as cloud pixels, noise in images, systemic mistakes,
multi-spectral images, distortions of terrain, etc.To
manage satellite imagery preprocessing, we need to
use an elaborate computational structure such as the
Hadoop Framework.
Hadoop is an open source distributed frame-
work based on the processing technique of Google
MapReduce and the distributed structure of the
file system. The Hadoop framework is composed
of principally of Hadoop Distributed File System
(HDFS) (D.Borthakur, 2018a) and Hadoop MapRe-
duce (D.Borthakur, 2018b). HDFS is a distributed
file system that holds big amounts of data and offers
strong access to information throughput. HDFS is ex-
tremely tolerant to faults and is intended for low-cost
hardware deployment. Data is divided into smaller
parts in the Hadoop cluster and spread across the clus-
ter. HDFS primary objective is to reliably store data
even in presence of errors including name node fail-
ure, data node failure, and network partition failures.
MapReduce is a programming model intended to pro-
cess huge volumes of data in parallel by separating
job into individual tasks. MapReduce main objective
is to divide input information set into separate parts
that are processed in a fully parallel way. For the data
stored in Hadoop Framework retrieval, there are many
methods and technologies such as Handcrafted meth-
ods, Machine learning and so on; in our work, we will
be concentrated on Deep Learning.
Deep learning (DL) is a machine learning sub-
group, referring to the implementation and variations
of a collection of algorithms called neural networks.
With these methods, you can use the network to learn
or train on a number of labeled samples (Wang et al.,
2016). The labeling of these samples is performed in
many ways. Machine learning feature extraction is
performed manually and classification is performed
by the machine. However, both the extraction of the
feature and the classification are performed by ma-
chine in deep learning. The Deep Learning neural
network is therefore more efficient in identifying the
Satellite Imagery. In addition, semantic information
gathered from deep neural networks can be used for
image retrieval to improve search efficiency.
Remote sensing data volume and heterogeneity
458
Balti, H., Mellouli, N., Chebbi, I., Farah, I. and Lamolle, M.
Deep Semantic Feature Detection from Multispectral Satellite Images.
DOI: 10.5220/0008350004580466
In Proceedings of the 11th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2019), pages 458-466
ISBN: 978-989-758-382-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

are considered as two separate challenging issues in
the litterature. Our research aims to suggest an adap-
tive structure to address the issue of scaling up and
processing large volume of remote sensing data using
Hadoop Framework and DL. In this work, we pro-
pose an approach that uses DL architecture for data
processing and Hadoop HDFS for data storage. Sec-
tion 2 offers a short survey of some related works.
Section 3 describes the proposed approach for remote
sensing data processing. In Section 4, we describe
data source, software and hardware configuration and
results obtained. Section 5 concludes the paper.
2 RELATED WORKS
The amount and quality of satellite images have been
greatly improved with the growth of satellite technol-
ogy. These data can not be processed using stan-
dard techniques. Although parallel computing and
cloud infrastructure (Hadoop, Spark, Hive, HBase,
etc.) make it possible to process such massive data,
such systems are sufficient for spatial and temporal
data.
Some works were performed on raster images
in the literature using MapReduce programming
paradigm. (Cary et al., 2009) presented MapRe-
duce model for the resolution of two major vec-
tor and raster data spatial issues: R-Trees bulk con-
struction and aerial image quality computation. Im-
agery data is stored in a compressed DOQQ (A Dig-
ital Orthophoto Quadrangle and Quarter Quadrangle)
file format, and Mapper and Reducer process those
files. (Golpayegani and Halem, 2009) implements
some image processing algorithms using MapReduce
model. Indeed, the first step is to convert images to
text format and then to binary format before using
them as a raw image. In contrast, (Almeer, 2012) pre-
sented a six-fold speedup for auto-contrast and eight-
fold speedup for the sharpening algorithm. (Kocaku-
lak and Temizel, 2011) used Hadoop and MapReduce
to operate a ballistic image analysis that needs a volu-
minous image database to be paired with an unknown
image. It was shown that the processing time was
lowered dramatically as 14 computational nodes were
in cluster setup. This method used a high computa-
tional requirement. (Li et al., 2010) tried to decrease
the time required for computing the huge amount of
satellite images using Hadoop and MapReduce meth-
ods for running parallel clustering algorithms. The
method begins with the clustering of each pixel and
then computes all current cluster centers according to
each pixel in a collection of clusters. (Lv et al., 2010)
suggested a different clustering algorithm that uses a
K-means strategy to remote sensing image process-
ing. Objects with matching spectral values, without
any formal knowledge, are grouped together. The
Hadoop MapReduce strategy supported the parallel
K-means strategy, as the algorithm is intensive both
in time and in memory. All these works concentrate
essentially on parallel processing using the Hadoop
Map-Reduce framework for image data.
For the remote sensing data processing task using
DL, Convolutional Neural Network (CNN) has shown
important enhancement in image similarity task as-
signments as the latest effective deep learning branch.
The concept that deep convolutional networks can re-
trieve high-level features in the deeper layers led by
the researchers to investigate methods this technique
can decrease the semantic gap.The extracted features
can be used as image representations in search algo-
rithms on both fully connected layers and convolution
layers. (Sun et al., 2016) proposed a method based on
CNN that extract features from local regions, in ad-
dition of extracting features from the whole images.
(Gordo et al., 2017) merged RMAC (Regional Max-
imal ACtivation) with triplet networks and also sug-
gested a regional proposal network (RPN) strategy for
the identification of the region of interest (RoI) and
the extraction of local RMAC descriptors. (Zhang
et al., 2015) proposed a gradient boosting random
convolutional network (GBRCN) to rank very high
resolution (VHR) satellite imagery. A sum of func-
tions (called boosts) are optimized in GBRCN. For
optimization, a modified multi-class softmax func-
tion is used, making the optimization job simpler,
SGD is used for optimization. (Zhong et al., 2017)
used reliable tiny CNN kernels and profound archi-
tecture to learn about hierarchical spatial relationships
in satellite data. An output class label of a softmax
classifier based on CNN DL inputs. The CPU han-
dles preprocessing (data splitting and normalization),
while the GPU runs convolution, ReLU and pooling
tasks, and the CPU handles dropout and softmax clas-
sification. Networks with one to three convolution
layers are evaluated, with receptive fields. In order
to estimate region boundary confidence maps which
are then interfused to create an aggregate confidence
map, (Basaeed et al., 2016) used a CNN committee
that conducts a multi-size analysis for each group.
(Längkvist et al., 2016) used the CNN in multispec-
tral images (MSI) for a complete, quick and precise
pixel classification, with a small cities digital surface
design. In order to improve the high level segmen-
tation, the low level pixel classes are then predicted.
The CNN architecture is evaluated and is analyzed.
(Marmanis et al., 2016) have tackled the prevalent
RS issue of restricted training information by using
Deep Semantic Feature Detection from Multispectral Satellite Images
459

domain-specific transfer learning. They used the Im-
ageNet dataset with a pre-trained CNN and extracted
the first set of orthoimagery depictions. These repre-
sentations are then transmitted to a CNN classifica-
tion. A novel cross-domain fusion scheme was cre-
ated in this study. Their architecture has seven con-
volutional layers, two long Multi Perceptron (MLP)
layers, three convolutional layers, two larger MLP
layers, and a softmax classifier. The features are ex-
tracted from the last layer. (Donahue et al., 2014) re-
search has shown that deeper layers contain the ma-
jority of the discriminatory information. Moreover,
they are equipped with features from the large (1 x 1 x
4096) MLP, a very long output of the vector and con-
vert it into 2D feature array with a large mask layer
(91 x 91), this is achieved because the large feature
vector is a computational bottleneck, while the 2D
data can be processed very efficiently via a second
CNN. This strategy works if the second CNN is able
to understand data through its layers in the 2D rep-
resentation. This is a very distinctive strategy which
raises some interesting questions concerning alterna-
tive DL architectures, this strategy was also success-
ful, since the characteristics of the initial CNN in the
new image domain were efficient.
The heterogeneity of input images as well as their
scaling are regarded independently in all the works
mentioned above. Our research aims to handle an
adaptive structure framework to address the issue of
scaling up and processing large volume of remote
sensing data combining Hadoop and DL systems.
3 PROPOSED APPROACH
Big remote sensing data processing is challenging.
The volume and heterogeneity actually presents is-
sues for this kind of data processing, and that is why,
to resolve this issue, we suggest a distributed archi-
tecture with DL model for data processing (Figure 1).
Our approach consists of 4 steps: (1) image storing;
(2) data processing and labelling; (3) data fusion .
3.1 Image Storing
A multi-spectral image is a compilation of various
monochrome images taken with a distinct sensor from
the same aerial scenes. Each image is termed a band.
Multi-spectral images are most frequently used for re-
mote sensing applications in image processing. Satel-
lites generally take several images in the visual and
non-visual spectrum from frequency bands.
There are many techniques for image processing
where we can do image processing. But the principal
drawback is that this machine-optimized tools are in
nature sequential. It would be a long time to process
large amounts of high-resolution remote sensing im-
ages when processing Remote Sensing Data (image
by image). That is why in our work, we will treat ev-
ery band separetly in a parallel way. We, therefore,
need a multi-specific framework that can apply par-
allelism in the most efficient way and guarantee that
every data is processed safely. Hadoop supplies this.
Besides, in moving the computation towards the pro-
cessing node instead of moving the data the princi-
ple of Hadoop implementation, ensures data-location.
The volume of output data is much larger than the
computation involved when handling high-resolution
remote sensing satellite images. Based on this, it can
be concluded that the Hadoop framework suits this
task best.
As a preprocessing step, before running the appli-
cation, we must save the remote sensing image files in
HDFS. This step is devided in three sub-steps (Figure
2).
First, we must split the image «Band»(B) in m
parts. The input image is chosen from the local file
system input folder, I
input
. For each input image,
B performs split operation if the image dimension
is greater than the predefined dimension. Generated
split band files (segments) (S
1
to S
m
) are placed in
the directory that is produced with the name of the
file as the image name. Secondly, a serialization step
of strips of bands is achieved. In this phase, each
group of split band files is transformed into a seri-
alized structure. Each folder that contains split im-
ages is selected and its data content is communally
written to a given metadata folder using serialization.
The metadata contain information about the number
of band strips, the filename, path/row of the band and
the band captured time. The third step is the serializa-
tion for HDFS block. As we have, from the previous
step, a file that contains the data content and the meta-
data we can now store it in HDFS and do the process-
ing task. Finally, upon completion of the above phase,
all operations during the implementation of MapRe-
duce will use these files as entries.
3.2 Data Processing
Once we have all our data splitted and stored in HDFS
we are going to perfom the processing step. Firstly,
we will assign each split to a map job.
This is a pseudo-code explaining the job of the
Mapper class:
Class: Mapper
Function: Map
Map(Key(Filename),BytesWritableValue
(SerializedBand<BFi>,Output)
KDIR 2019 - 11th International Conference on Knowledge Discovery and Information Retrieval
460
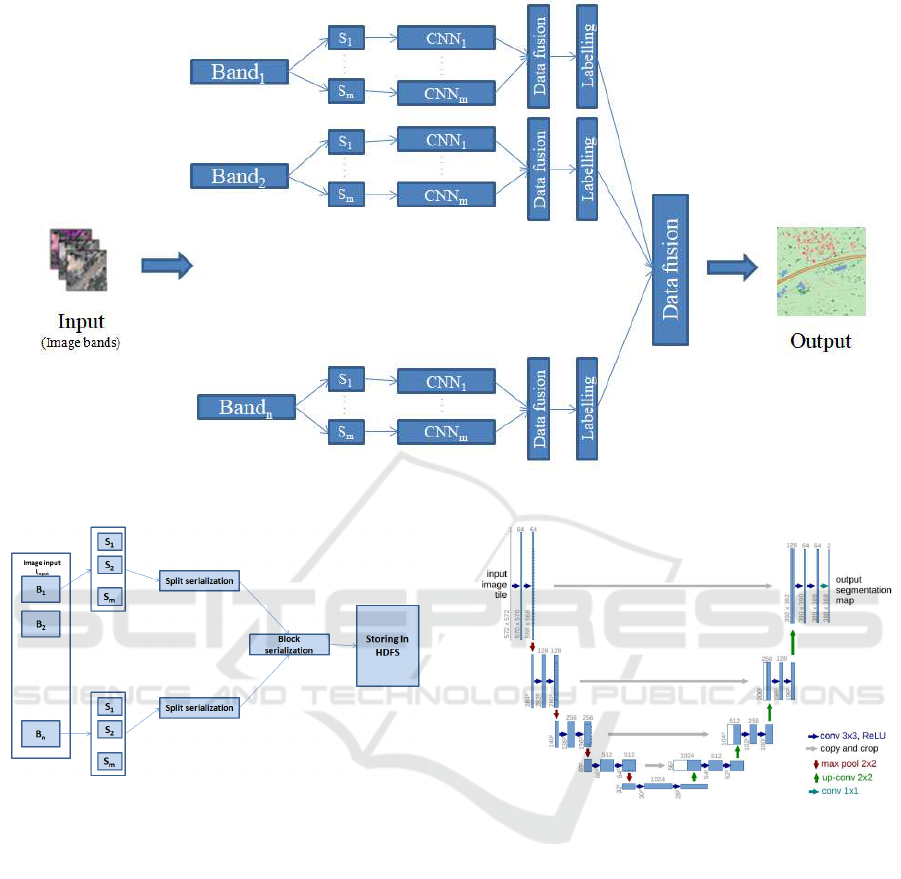
Figure 1: The architecture of the proposed approach.
Figure 2: Preprocessing step.
Foreach BandSplit<Sm>in BFi
Processing(Sm);
SerializedEachMapOutput(OS1..OSm)->OFBi;
Output:
SetKey:Filename==KeyInputToMap;
SetValue:SerializedMapOutput<OFBi>;
In the Mapper, we will treat our strips of images
using UNET which belongs to CNN architecture.
This model makes the shape of the letter «U »that’s
why he is called UNET. It is composed from two
parts: an encoder and a decoder (Figure 3).
UNET was developed by (Ronneberger et al.,
2015) for the segmentation of Bio Medical images.
The architecture contains two paths:
• The first path is the contraction path (also called
encoder) used to capture the features in the image.
The encoder is just a traditional stack of convolu-
Figure 3: UNET architecture.
tion and Max Pooling layers.
• The second path is the expansion path (also
known as a decoder) that allows us to locate
objects precisely using transposed convolutions.
Thus, it is a fully end-to-end convolutional net-
work (FCN), without a dense layer for which rea-
son it can accept images of any size.
The encoder consists of 4 blocks. Each block is com-
posed of: two 3x3 convolution layer with activation
function (with batch normalization) and a 2x2 Max
Pooling and the decoder part is symmetrical with the
encoder part, this part consists of transposed convolu-
tion layers and convolutional layers. The processing
is applied on each strip r times in order to detect r
object. In the training step, we added the reflectance
indices in order to detect the water or the vegetation
these are some indices. These indices show that fea-
Deep Semantic Feature Detection from Multispectral Satellite Images
461
ture learning is well-related to certain categories of
objects found in the traditional Geographic Informa-
tion System (GIS).
• NDWI(Normalized Difference Water Index):
NDW I =
GREEN − NIR
GREEN + NIR
(1)
• CCCI (Canopy Chlorophyl Content Index):
CCCI =
NIR − REDedge
NIR + REDedge
∗
NIR + RED
NIR − RED
(2)
• EVI (Enhanced Vegetation Index):
EV I = G∗
NIR − RED
NIR +C1 ∗ RED − C2 ∗ BLUE +L
(3)
• SAVI (Soil-Adjusted Vegetation Index):
SAVI =
(1 + L)(NIR − RED)
NIR + RED + L
(4)
where:
- L is an adjustment factor of the canopy back-
ground. L is a constant equal to 0.5;
- G gain factor;
- C1, C2 are the coefficients of the aerosol resis-
tance term, which use the blue band to correct
aerosol influences in the red band.
Obviously, the idea that we have infrared and other
non-visible frequency range stations permit us to eas-
ily define certain classes from the pixel values, with-
out any background information. Finally, we obtain a
segmentation map containing the features of each ob-
ject separately in form of a .csv file (i.e each object is
associated to a csv file). We merge all these files in a
single file. This file contains the features of the strip.
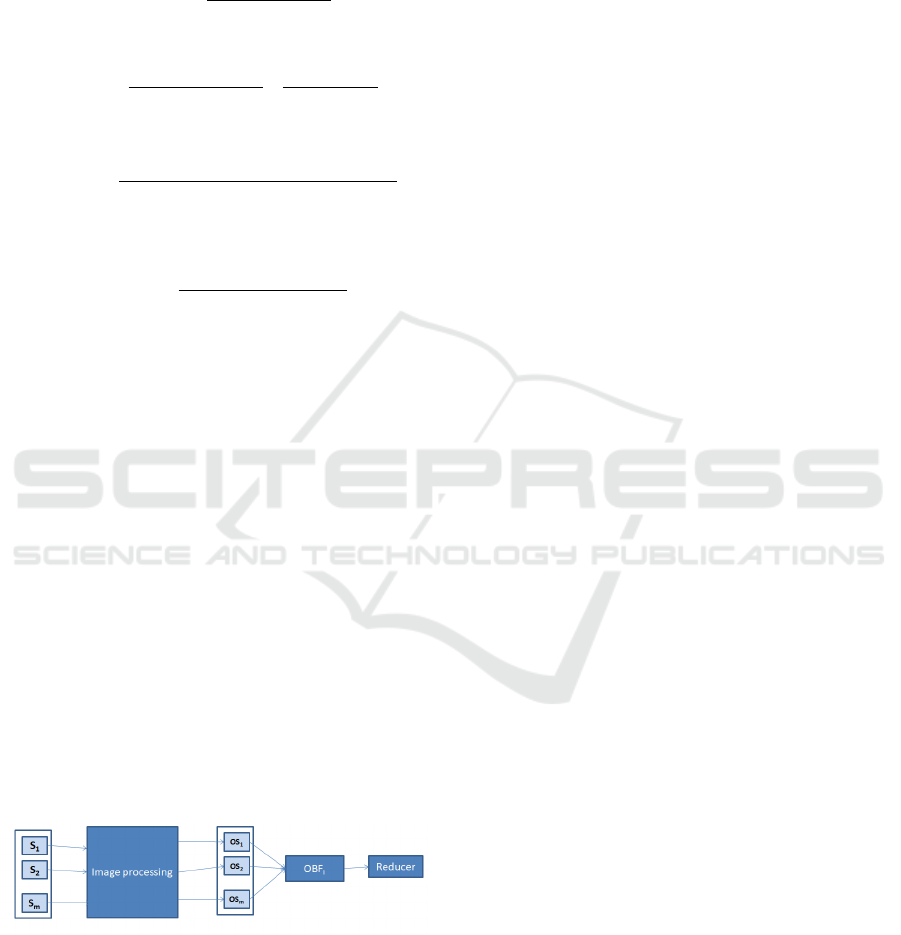
Once, we obtained several outputs representing
the feature maps of each band they are serialized in
the mapper as mentioned in the Mapper pseudo-code.
The outputs of the mapper job will be assigned to the
Reducer function (Figure 4).
Figure 4: Map job description.
Therefore, the reducer will deserialize the map
outputs and combine the splits.
Class:Reducer
Function: Reduce
Reduce(Key(Filename),BytesWritableValue
(SerializedMapOutput<OFBi>,Output)
Deseiralize_value(OFBi);
Foreach processedBandSplit<OSm> in OBFi
ImageProcessing(Sm);
CombineEachOutput(FS1..FSm)->OBn
SaveReduceOutput(OBn);
Output:
SetKey:Filename==BandFileName;
SetValue:ReduceOutput<OBn>;
For the labelling task, according to its features,
each object will be assigned to a color and a numerical
id.
3.3 Data Fusion and Labelling
At this step, we have the band reconstructed we need
to merge all the bands. The fusion of the bands at-
tempts at thin borders, connecting them to closed con-
tours, and generating a map of hierarchical segmenta-
tion.
For the bands fusion, we used the Wavelet Trans-
form (WT) (Rani and Sharma, 2013). In fact, WT
plays major role in Multi-resolution Analysis in pro-
ducing a representation between spatial and Fourier
domains. Based on their local frequency content, each
image could be measured by decomposing the initial
image into various channels, where decomposition is
provided by discrete two-dimensional WT. There are
five steps that should by performed in order to perfom
this step.
Firstly, effect upscaling and generate the Inten-
sity (I) image from the upscaled multispectral im-
age, perform the corresponding histogram between
the bands and I image, decompose the bands re-
lated to the Wavelet planes, and finally apply inverse
Wavelet Transform to get merged multispectral band.
All this work will be performed in the master node.
4 EXPERIMENTS AND RESULTS
In this section, we discuss the experimental setup and
data set used for testing the proposed approach.
4.1 Environmental Setup
Our experiments was performed on 16-node cluster.
In Table 1, we describe the hardware configuration of
the nodes.
4.2 Data Description
The framework that has been created can generally be
used to handle multispectral satellite images. Mul-
tispectral images usually relate to 3 to 10 channels
KDIR 2019 - 11th International Conference on Knowledge Discovery and Information Retrieval
462
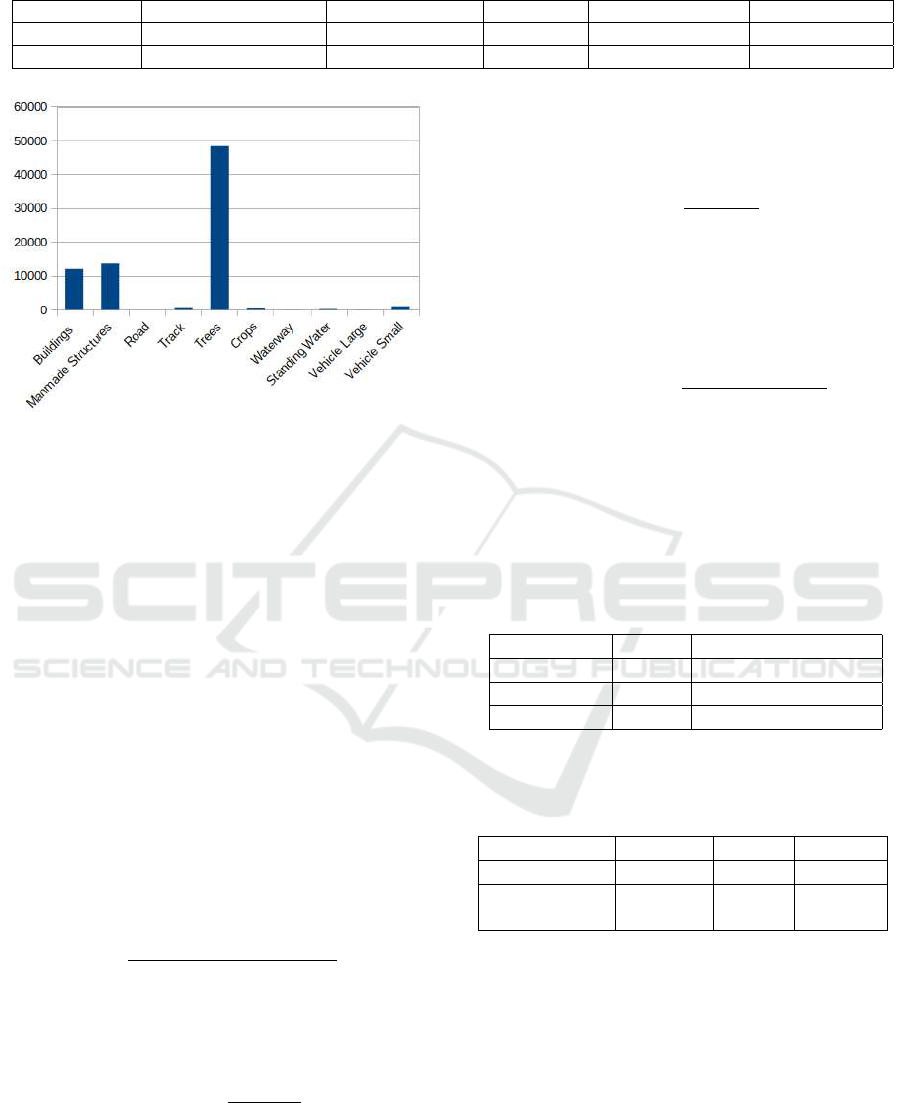
Table 1: Nodes hardware description.
Node Type Memory size (RAM) CPU CPU cores Operating System Hadoop version
Master Node 6 Gbytes Intel i7 3.90 GHz 4 Ubuntu 16.04 2.7
All the Slaves 8 Gbytes Intel i7 3.90 GHz 4 Ubuntu 16.04 2.7
Figure 5: Distribution of labels on the multispectral dataset.
represented in pixels. Using a remote sensing captor,
each band is obtained. The first dataset is ISPRS Vai-
hingen (ISPRS, 2019) data which containe 33 RGB
(Red-Green-Blue) images with their ground truth and
several resolutions.
The second dataset contains 450 satellite images
which include both 3-band images (RGB colors)
and 16-bands which are taken from the multispec-
tral (400-1040nm) and short-wave infrared (SWIR)
(1195-2365nm) range with different spatial resolu-
tions.
These images are captured by the commercial sen-
sor WorldView-3 (Corporation, 2017). Figure 5 rep-
resents labels distribution on the multispectral dataset.
4.3 Evaluation Metrics
The first metric that we used is the time, then in order
to evaluate the Speedup (S) of our architecture com-
paring to a single node architecture we compute:
S =
SpeedO f aSingleNode
SpeedO f OurArchitecture
(5)
The second metric is the precision: it is the relation of
the number of right predictions to the total number of
input samples.
precision =
T P
T P + FP
(6)
where TP (True Positives) indicates the number of
properly identified items, FN (False Negatives) the
number of undetected items and FP (False positives)
the amount of wrongly identified items.
The third metric is the recall: It is the percentage
of the number of predictions relevant to the total num-
ber of samples entered.
recall =
T P
T P + FN
(7)
The fourth metric is the F1-score: F1-Score is the
mean between accuracy and recall. The F1-Score
range is [ 0, 1 ]. It informs you how accurate your
classifier is (how many objects it properly classifies)
and how robust it is.
F1 − score = 2 ∗
Precision ∗ recall
precision + recall
(8)
4.4 Results
In this section, we present the results of our appraoch,
in terms of speed and in term of precision and recall.
Table 2, describes the execution time in minutes
(min) of the proposed architecture compared to a sin-
gle node architecture with the Speedup ratio.
Table 2: Execution times.
Dataset ISPRS Multispectral dataset
Single Node 6.4min 35.2min
MultiNode 1.5min 5.3min
Speedup 4.2 6.71
Table 3 corresponds to the results of the proposed
architecture in term of precision and recall.
Table 3: Results obtained for the two datasets.
Dataset Precision Recall F1-score
ISPRS 90.2 % 81.2 % 85.46%
Multispectral
dataset
94.3% 92.2% 93.24%
Table 4 contains the results that we obtained for
each class in the ISPRS dataset.
Table 5 includes the results obtained for the mul-
tispectral dataset with each class.
Some images are shown to illustrate our results.
Figure 6 represents the 3-band image results where
image (a) is the real RGB image, (b) is the result of
our work. We denote that the objects detected in this
type of image are Imprevious Surfaces, low vegeta-
tion, Buildings, Cars, Trees and Clutter.
For the classification of this image we got good
results mentionned in Table 6 .
Deep Semantic Feature Detection from Multispectral Satellite Images
463
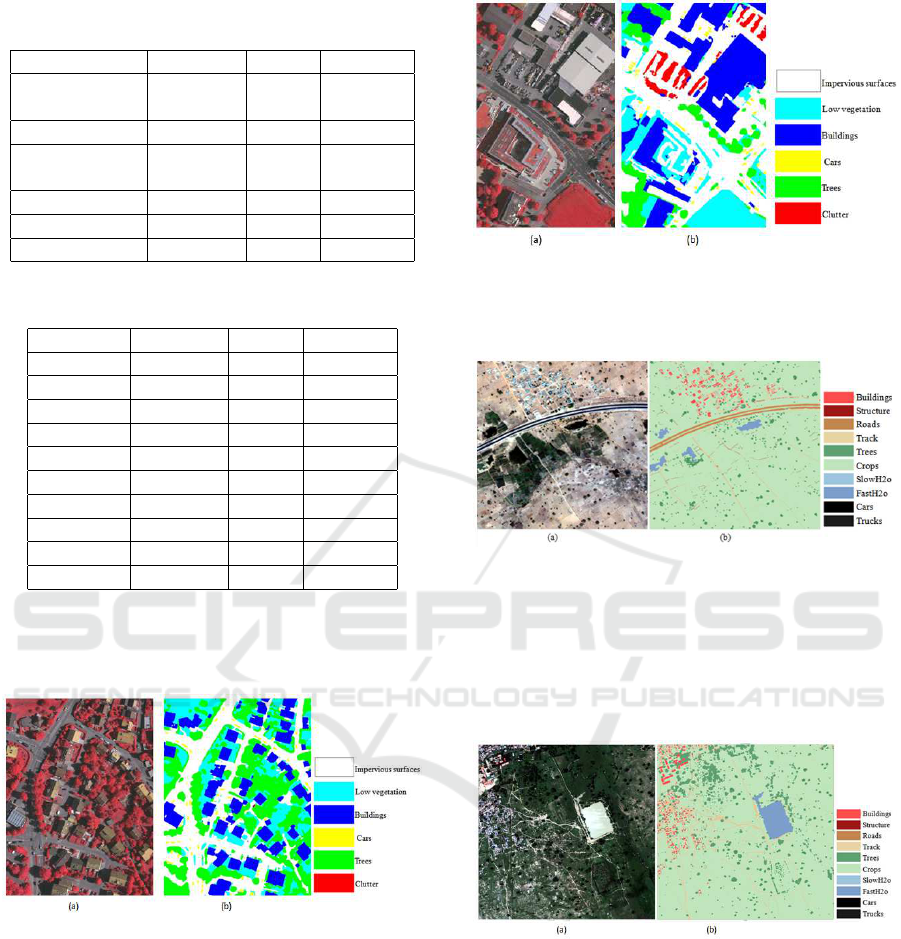
Table 4: Results obtained for each class from the ISPRS
dataset.
Class Precision Recall F1-score
Impervious
surfaces
0.92 0.93 0.92
Building 0.95 0.96 0.95
Low vegeta-
tion
0.84 0.84 0.84
Tree 0.90 0.90 0.90
Car 0.83 0.82 0.82
Clutter 0.97 0.41 0.57
Table 5: Results obtained for each class of the multispectral
dataset.
Class Precision Recall F1-score
Buildings 0.88 0.87 0.87
Cars 0.70 0.64 0.67
Crops 0.83 0.83 0.83
FastH2O 0.38 0.36 0.37
Roads 0.36 0.20 0.26
SlowH2O 0.76 0.62 0.68
Structure 0.95 0.96 0.95
Tracks 0.96 0.95 0.95
Trees 0.98 0.95 0.96
Trucks 0.93 0.94 0.93
As we can notice in Figure 6 and in Table 6, there
is no clutter detected as there is no clutter in the orig-
inal RGB image.
Figure 6: RGB images results (a) is the RGB image, (b) is
the result of our work.
Figure 7 is another RGB classification, in which
we had some results not good as the first image, here
Table 7 in which we present the results. For example,
clutter detection had the accuracy of 98%, recall 60%
and F1-score 75%. This can be explained as there are
some objects which are not clutter were assigned to
clutter.
Figure 8 represents the result of our work on 16-
band image where image (a) indicates the real im-
age scene and (b) is the results the objects detected
in this images are Buildings, cars, crops, Fast H2O
(rivers, sea, etc.), roads, Slow H2O (lakes, swimming
Figure 7: RGB images results (a) is the RGB image, (b) is
the result of our work.
pool,etc), Structures, Tracks, Trees and Trucks.
Figure 8: 16-band images results (a) is the real image (b) is
the result.
Figure 9 represents another results of 16-band im-
age classification. In this image, the roads detection
had 50% of precision and 36% of recall. This proves
that some roads are assigned to other objects for ex-
ample to Tracks.
Figure 9: 16-band images results (a) is the real image (b) is
the result.
Table 8 shows our overall precision over the IS-
PRS Vaihingen dataset and the results of the challenge
website.
Our approach had slightly higher precision than
the BKHN_9 and ADL_3 results, which used Fully
Convolutional DenseNet (Jégou et al., 2017) and
patch-based prediction (Paisitkriangkrai et al., 2015).
In contrast, our method does not outperfom DLR_9
and BKHN_4 they had respectively 0.1 % and 0.5%
f1-score higher than ours. In fact, DLR_9 uses
edge information obtained from the initial image
KDIR 2019 - 11th International Conference on Knowledge Discovery and Information Retrieval
464
Table 6: Results obtained for the figure 6 classification.
class imprevious surfaces Low vegetation Building Cars Trees Clutter
precision 0.93 0.95 0.86 0.9 0.81 –
Recall 0.93 0.98 0.79 0.95 0.87 –
F1-score 0.93 0.97 0.82 0.92 0.83 –
Table 7: Results obtained for the figure 7 classification.
class imprevious surfaces Low vegetation Building Cars Trees Clutter
Precision 0.89 0.70 0.80 0.93 0.88 0.94
Recall 0.99 0.83 0.93 0.80 0.80 0.57
F1-score 0.93 0.90 0.85 0.82 0.84 0.71
Table 8: Results on the ISPRS Vaihingen dataset.
Methods Overall precision
RIT_L8 87.8%
ADL_3 88%
BKHN_9 88.8%
DLR_9 90.3%
BKHN_4 90.7%
Our result 90.2%
as an extra input channel for learning and predict-
ing, BKHN_4’s approach uses eight information from
Normalized Digital Surface Model (nDSM) and Digi-
tal Surface Model (DSM) data to learn the FCN mod-
els. Unlike these compared works, our model that
we propose in this paper remains as precise as before,
given the heterogeneity of the images.
5 CONCLUSION
CNN popularity in many computer vision tasks has
risen in the latest years and the retrieval systems for
images are not exempt from these developments. In
this paper, we proposed a DEEP HDFS framework
combined with a DEEP CNN in order to extract fea-
ture and detect objects in multi-spectral remote sens-
ing images. In our work, we have showen that even
for complex image processing tasks, a minimum of
4X velocity could be accomplished. Moreover, we
have very interesting results for the two types of
datasets, we had a precision of 90.2% for the IS-
PRS dataset and 94.2% for the multispectral dataset.
But, in the multispectral dataset, the results for the
FastH2O and the roads are very low. This can be ex-
plained as these two types look alike: two linear ob-
jects. Also, in our dataset, the number of images that
contain roads or FastH2O is not very large. So, it can
be a learning problem. In our future work, we will
focus on adapting our architecture to another type of
remote sensing data which is hyperspectral satellites
images and also we will try to ameliorate the velocity
of our approach.
REFERENCES
Almeer, M. H. (2012). Cloud hadoop map reduce for re-
mote sensing image analysis.
Basaeed, E., Bhaskar, H., Hill, P., Al-Mualla, M., and Bull,
D. (2016). A supervised hierarchical segmentation of
remote-sensing images using a committee of multi-
scale convolutional neural networks. International
Journal of Remote Sensing, 37(7):1671–1691.
Cary, A., Sun, Z., Hristidis, V., and Rishe, N. (2009). Expe-
riences on processing spatial data with mapreduce. In
International Conference on Scientific and Statistical
Database Management, pages 302–319. Springer.
Corporation, S. I. (2017). WorldView-3 Satellite Sensor
(0.31m). https://www.satimagingcorp.com/satellite-
sensors/worldview-3/.
D.Borthakur (2018a). HDFS Architecture Guide. http://
hadoop.apache.org/docs/r1.2.1/hdfs\_design.html.
D.Borthakur (2018b). MapReduce Tutorial. http://hadoop.
apache.org/docs/r1.2.1/mapred\_tutorial.html.
Donahue, J., Jia, Y., Vinyals, O., Hoffman, J., Zhang, N.,
Tzeng, E., and Darrell, T. (2014). Decaf: A deep con-
volutional activation feature for generic visual recog-
nition. In International conference on machine learn-
ing, pages 647–655.
Golpayegani, N. and Halem, M. (2009). Cloud computing
for satellite data processing on high end compute clus-
ters. In 2009 IEEE International Conference on Cloud
Computing, pages 88–92. IEEE.
Gordo, A., Almazan, J., Revaud, J., and Larlus, D. (2017).
End-to-end learning of deep visual representations for
image retrieval. International Journal of Computer
Vision, 124(2):237–254.
ISPRS (2019). SPRS Test Project on Urban Classifica-
tion, 3D Building Reconstruction and Semantic La-
beling. http://www2.isprs.org/commissions/comm3/
wg4/2d-sem-label-vaihingen.html.
Jégou, S., Drozdzal, M., Vazquez, D., Romero, A., and Ben-
gio, Y. (2017). The one hundred layers tiramisu: Fully
convolutional densenets for semantic segmentation. In
Deep Semantic Feature Detection from Multispectral Satellite Images
465

Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition Workshops, pages 11–
19.
Kocakulak, H. and Temizel, T. T. (2011). A hadoop solu-
tion for ballistic image analysis and recognition. In
2011 International Conference on High Performance
Computing & Simulation, pages 836–842. IEEE.
Längkvist, M., Kiselev, A., Alirezaie, M., and Loutfi, A.
(2016). Classification and segmentation of satellite or-
thoimagery using convolutional neural networks. Re-
mote Sensing, 8(4):329.
Li, B., Zhao, H., and Lv, Z. (2010). Parallel isodata
clustering of remote sensing images based on mapre-
duce. In 2010 International Conference on Cyber-
Enabled Distributed Computing and Knowledge Dis-
covery, pages 380–383. IEEE.
Lv, Z., Hu, Y., Zhong, H., Wu, J., Li, B., and Zhao, H.
(2010). Parallel k-means clustering of remote sensing
images based on mapreduce. In International Confer-
ence on Web Information Systems and Mining, pages
162–170. Springer.
Marmanis, D., Wegner, J. D., Galliani, S., Schindler, K.,
Datcu, M., and Stilla, U. (2016). Semantic segmenta-
tion of aerial images with an ensemble of cnns. ISPRS
Annals of the Photogrammetry, Remote Sensing and
Spatial Information Sciences, 3:473.
Paisitkriangkrai, S., Sherrah, J., Janney, P., Hengel, V.-D.,
et al. (2015). Effective semantic pixel labelling with
convolutional networks and conditional random fields.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition Workshops, pages 36–
43.
Rani, K. and Sharma, R. (2013). Study of image fusion us-
ing discrete wavelet and multiwavelet transform. In-
ternational Journal of Innovative Research in Com-
puter and Communication Engineering, 1(4):95–99.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. CoRR, abs/1505.04597.
Sun, S., Zhou, W., Tian, Q., and Li, H. (2016). Scalable ob-
ject retrieval with compact image representation from
generic object regions. ACM Transactions on Mul-
timedia Computing, Communications, and Applica-
tions (TOMM), 12(2):29.
Wang, Y., Zhang, L., Tong, X., Zhang, L., Zhang, Z., Liu,
H., Xing, X., and Mathiopoulos, P. T. (2016). A
three-layered graph-based learning approach for re-
mote sensing image retrieval. IEEE Transactions on
Geoscience and Remote Sensing, 54(10):6020–6034.
Zhang, F., Du, B., and Zhang, L. (2015). Scene classifica-
tion via a gradient boosting random convolutional net-
work framework. IEEE Transactions on Geoscience
and Remote Sensing, 54(3):1793–1802.
Zhong, Y., Fei, F., Liu, Y., Zhao, B., Jiao, H., and Zhang,
L. (2017). Satcnn: satellite image dataset classifica-
tion using agile convolutional neural networks. Re-
mote sensing letters, 8(2):136–145.
KDIR 2019 - 11th International Conference on Knowledge Discovery and Information Retrieval
466
