
A Low-power, Reachable, Wearable and Intelligent IoT Device for
Animal Activity Monitoring
L. Duran-Lopez, D. Gutierrez-Galan, J. P. Dominguez-Morales, A. Rios-Navarro,
R. Tapiador-Morales, A. Jimenez-Fernandez, D. Cascado-Caballero and A. Linares-Barranco
Robotics and Technology of Computers Lab., University of Seville, Seville 41012, Spain
Keywords:
Low-power, Wearable, Artificial Intelligence, IoT, Activity Monitoring.
Abstract:
Along with the proliferation of mobile devices and wireless signal coverage, IoT devices, such as smart wrist-
bands for monitoring its owner’s activity or sleep patterns, get great popularity. Wearable technology in human
life has become quite useful due to the information given (sleep hours, heart rate, etc). However, wearables
for animals does not give information about behaviour directly: they collect raw data that is sent to a server
where, after a post-processing step, the behaviour is known. In this work, we present a smart IoT device that
classifies different animal behaviours from the information obtained from on-board sensors using an embed-
ded neural network running in the device. This information is uploaded to a server through a wireless sensor
network based on Zigbee communication. The architecture of the device allows an easy assembly in a re-
duced dimension wearable case. The firmware allows a modular functionality by activating or deactivating
modules independently, which improve the power efficiency of the device. The power consumption has been
analyzed, allowing the 1Ah battery to work the system during several days. A novel localization and distance
estimation technique (for 802.15.4 networks) is presented to recover a lost device in Do
˜
nana National Park
with unidirectional antennas and log-normalization distance estimation over RSSI.
1 INTRODUCTION
The tendency of ”Internet of Things” is to connect
everything to the Internet, including people and ani-
mals. New wearable devices appeared for health care
and activity monitoring. In recent years, the tendency
is also to be able to get information from pets and
animals which live in farms, as dairy cows (Nadimi
et al., 2008a; Nadimi et al., 2008b; Nadimi et al.,
2012). There are many application under the concept
of IoT in different fields (Miorandi et al., 2012) that
are currently hot topics, such as: Smart Buildings
(focused on reducing the consumption of resources
related to the building (Wei and Li, 2011) and im-
prove the satisfaction of the human populating it),
Smart Cities (create a cyberphisycal eco-system of
interconnected elements that are able to optimize the
usage of physical city infrastructures and the quality
of life for its citizens (Zanella et al., 2014)), Environ-
mental Monitoring (real-time and on device process-
ing along with the interconnection of several devices
for detecting and monitoring anomalies that can lead
to endangering human and animal life (Bellini and
Amaud, 2017; Memon et al., 2016)), Smart Business
(IoT technologies for monitoring product availability
in real-time and maintaining a precise stock inven-
tory (Xu et al., 2014), (Lindsay and Reade, 2006)),
Health-care (Patients carrying sensors that monitor
parameters such as body temperature, blood pressure,
breathing activity along with other wearable sensors
(accelerometer or gyroscopes) (Rahmani et al., 2015;
He and Zeadally, 2015)).
The IoT solution presented in this paper is under
the topic of environmental and wildlife monitoring.
Although in the literature it can be found some appli-
cations for farm animals, this work presents a solution
for wild and semi-wild animals living in an environ-
ment where there is not a Wide Area Network, e.g.
LoRaWAN (Low Power Wide Area Network) (Ade-
lantado et al., 2017).
An intelligent and wearable collar to monitor the
animal activity is presented, along with the com-
munication infrastructure for setting up the Wireless
Sensor Network (WSN) for animals monitoring. It
consists of an embedded implementation of a neu-
ral network for microcontroller that classifies the ani-
mal patterns and uploads the information to a remote
database that can be accessed from the Internet. Sec-
516
Duran-Lopez, L., Gutierrez-Galan, D., Dominguez-Morales, J., Rios-Navarro, A., Tapiador-Morales, R., Jimenez-Fernandez, A., Cascado-Caballero, D. and Linares-Barranco, A.
A Low-power, Reachable, Wearable and Intelligent IoT Device for Animal Activity Monitoring.
DOI: 10.5220/0008493505160521
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 516-521
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tion 2 presents the collar as an IoT device, describ-
ing its features, its main hardware components and
its functionality. Section 3 details the communica-
tion infrastructure topology. Section 4 describes the
experiments carried out with horses in Do
˜
nana Na-
tional Park. Section 5 presents the results of the ex-
periments. Finally, the conclusions of this work are
presented in Section 6.
2 COLLAR AS AN IoT DEVICE
The presented collar has been designed taking into
account the main IoT devices requirements: low-
power consumption, small size and reconfigurability
along with artificial intelligence (AI) integration. It
represents a manufacturing oriented design from the
previous prototype version (Gutierrez-Galan et al.,
2017b). New features have been added to improve
the prototype that directly affect how well the system
works. The collar features, hardware functionalities
and firmware are described below:
2.1 Features
Main novelties over the most common ones in other
IoT devices for monitoring are:
• Ultra-low-power Consumption: if a conserva-
tive policy of data transmission is taken (collect-
ing raw data, processing it into the collar, and
sending only the results) the battery life of the de-
vice will be extended (Dominguez-Morales et al.,
2016).
• Modular: the user is able to activate/deactivate
collar functionalities on-the-fly if they are needed
or not. It can be done in real time sending basic
commands from Internet to the communication
infrastructure. So, the collar is user-customizable.
• Configurable: parameters of firmware modules
can also be updated in order to support different
operating options (e.g. time between data trans-
missions, sleep mode parameters, etc).
• Intelligence: raw data can be processed by the
embedded Artificial Neural Network (ANN) that
is implemented on the collar (Gutierrez-Galan
et al., 2017b; Gutierrez-Galan et al., 2017a), be-
fore their transmission. Thus, thanks to config-
urable novelty, an user could change from one
trained NN parameters to another one deployed in
the collar on-the-fly. Therefore, valid processed
information is transmitted, instead of raw data
for a later processing step, what considerably de-
creases the power consumption.
(a) Collar PCB & Antenna (b) Collar device dur-
ing the experiments.
Figure 1: (a) From left to right: 1) Antenova Asper
2.4G/GNSS Antenna, 2) PCB back view, showing the SD
card slot.
2.2 Hardware Description
The collar dimensions are 25.10 x 78.05mm. It
is based on an ARM Cortex M0+ microcon-
troller unit (MCU), which belongs to an ultra-
low power consumption family. In particular, the
STM32L072RZT6. This family allows to change
the MCU running mode between full, low-power and
ultra-low-power modes. This MCU has a power con-
sumption of 0.86 µA and 0.29 µA in low-power mode,
and in ultra-low-power mode, respectively.
To transmit the information, a XBee PRO S2B
module is included, since it is able to be configured
either as a point-to-point network or as a mesh net-
work to establish a WSN. Although this module is not
a low-power module, power consumption can be re-
duced by sending a sleep request.
A full inertial measurement unit (IMU)
1
with a
3-axis accelerometer, a 3-axis gyroscope, and 3-axis
magnetometer is included and connected through I2C
bus. This unit obtains the animal activity information
(as behavioral patterns or physical activity) from raw
data.
Furthermore, to complement the movement data,
a high performance, ultra-low-power GPS module
(Quectel L70-RL) is used. Finally, a Hall-Effect cur-
rent sensor is also included on the collar to have bat-
tery state information.
As in every network, communication problems
may occur if the device is out of range, missing in-
formation about collars. For this purpose, the device
carries an SD card for storing data when the collar is
either inside or outside of the network. Data can be
read from the SD card and transmitted throw the net-
work when the collar returns to the network coverage
area. In case of collar loss, ie. the animal has lost the
collar in the countryside, it can be recovered while the
1
See MinIMU-9 v5 (LSM6DS33 and LIS3MDL)
A Low-power, Reachable, Wearable and Intelligent IoT Device for Animal Activity Monitoring
517
battery has power. The collar could detect that there
is no animal attached and enter in a low power mode
that allows radio coverage detection. Using the unidi-
rectional designed XBee antenna attached to a laptop,
the distance from the laptop to the lost collar can be
estimated, together with the direction, in order to lo-
calize the device.
The battery selected to power the collar is a LiPo
of 1 A h. It is connected to DC-DC regulator, which
allows us to charge and also turn on/off the device.
A magnetic on/off switch allow all the components
(PCBs, SDcard, antenna, battery, ...) to be isolated
into a special epoxy resin to make the collar robust
enough to be used in semi-wild animals.
2.3 Firmware
The intelligence of this device resides in the NN im-
plemented in the microcontroller and its capability to
be reconfigured.
The low power consumption is achieved by us-
ing a timer, which throws a periodic interruption ev-
ery 1,5 seconds (user-configurable). When an inter-
ruption occurs, a state machine is executed. This
state machine has several states, and some of these
states can be disabled if they are not needed to save
power. There are mandatory states, such as INIT,
for device initialization; or WAIT, where the system
is waiting for GPS valid signal and to be joined to
a WSN. But there are also optional states which es-
tablish how the device works: BEHAVIOR(1), CAP-
TURE(2), SEND(3), SLEEP(4), EMERGENCY(5)
and RECOVERY(6) modes.
In (1), data is collected from the IMU, processed
by an NN every 1.5 seconds (user-configurable) and
stored in the SD memory. Mode (2) is used when new
raw data is required in order to train the NN, thus in
this mode the NN is disabled. User only could select
one of these two running modes. When the collar has
behavioral information, mode (3) could be enabled to
transmit the behavior pattern along with the time, or
disabled to save battery in any special situation. After
monitoring, the device goes to mode (4) to enter the
MCU in ultra-low-power consumption state. Mode
(5) is automatically activated when collar remains a
specific number of days out of range, in order to try
to be found by the mobile node using the distance es-
timator algorithm. In that mode, the collar transmits
simple packets periodically during a specific time in-
terval. Finally, (6) is used only when the collar must
be recovered for extracting the information stored in
the SD card, eg. the animal has lost the collar. This
mode can be activated remotely or automatically if the
collar is not detecting any activity for a configurable
period of time.
The embedded version of the ANN implemented
in the device is able to obtain a 90% of hit average
using a simple three layers architecture (Gutierrez-
Galan et al., 2017b).
3 IoT SYSTEM: NETWORK
TOPOLOGY
In some IoT based systems, there exist a central node
or master, which coordinates the communications be-
tween slave devices and the Internet. And it also
has the goal of creating the network that allows to
get the collars distributed without data. In this work,
we have used a complete infrastructure to deploy a
WSN which is able to have a wide network that cover
the land extension needed (Dominguez-Morales et al.,
2016).
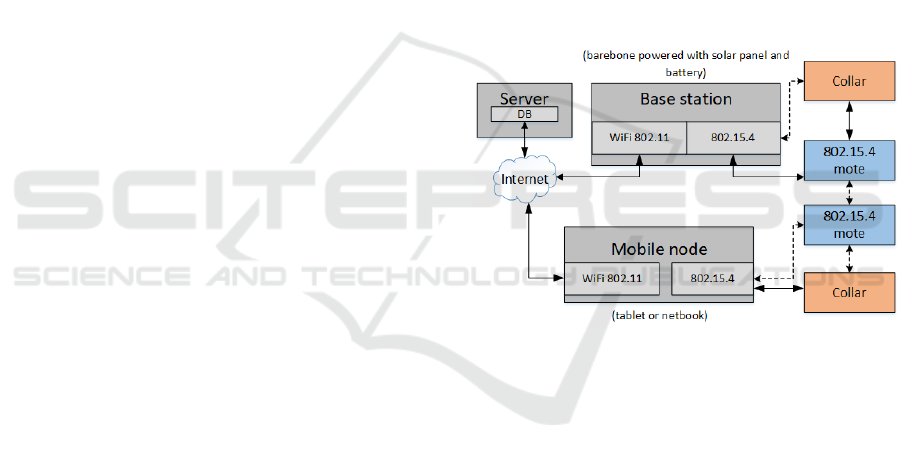
Figure 2: Block diagram of network’s communication sys-
tem.
3.1 Subsystems Description
The described collar IoT device information is com-
municated to the Internet through a communication
infrastructure composed of the following items:
• Base Station: it serves as the WSN coordina-
tor. It receives packets from collars through the
mote network and upload them to a remote web
server using WiFi or wired connection. It is
also provided with a set on sensors for measur-
ing the environmental conditions. It is composed
of a BridgeBoard PCB (Gutierrez-Galan et al.,
2017b); an Intel NUC as main host; a 60A battery;
two antennas (wifi and zigbee) and a solar panel
(1476 mm × 659 mm × 35 mm). All components,
but the solar panel, are enclosed in a hermetic box.
• 802.15.4 Sniffer and Mobile Device: it allows
to track animals using the GPS information from
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
518

collars or using the RSSI information obtained
from a directional antenna. For this purpose, a
802.15.4 sniffer has been developed, which cap-
tures the data packets sent by all nodes of the net-
work and is capable of analyze and obtain infor-
mation about signal strength and location. The
sniffer is a NesC implementation of a platform-
independent IEEE 802.15.4 MAC protocol (Uni-
versity of California, 2009) called TKN15.4 run-
ning on a TelosB CM5000-SMA mote. It is
connected to a portable device through an USB
port, where a desktop application collects and pro-
cesses the information. It serves as a deployment
assistant, when is used to sense the information
received from other stations and assessing the ef-
fective range of coverage of each fixed node and
collar.
• Mote Network: it is a set of XBee devices con-
figured as routers, which are connected in a mesh-
fashion and placed in specific spots of the park
to increase the coverage area. It includes a Li-Po
battery and a small solar cell. Its goal is to route
the packets received from the collars to the base
station.
4 CASE OF USE: DO
˜
NANA
NATIONAL PARK
The IoT system has been tested in Do
˜
nana National
Park. The area where the tests were performed is
shown in Fig. 3, a wooded zone with a high density
of vegetation. Base station and motes are signalized.
Firstly, the base station was established in a WiFi-
accessible area in order to be connected to the remote
web server. Next, the mote network was deployed
around the base station at specific spots to obtain the
maximum coverage (Fig. 3), using the mobile device
with a non-directional antenna (with a gain equals
to the collar’s antenna). In this way, we can deter-
mine the range by observing the maximum distance at
which packets (coming from one mote) are received
from the sniffer (which is equivalent to the collar)
with the signal strength above the sensitivity thresh-
old of the collar. The maximum distance between two
consecutive nodes was 127m, while the other two did
not exceed more than 90m between them because of
being in a high-density vegetation area.
The collars were placed to horses from different
breeds in order to test the robustness of the classi-
fier. At the same time, the SD card on each collar
was logging the sensors data. This data will be used
to increase the size of the training dataset of the neural
Figure 3: Satellite view of working area at Do
˜
nana. Blue
area (BS) represents the base-station range. Green zones
represent motes range (M1-M3).
network.
Finally, we tested the capability of the mobile
node to find an out of range collar. The mobile node
uses a directional antenna, an emergency network co-
ordinator (that works in a different frequency than the
rest of the motes), and a software that is capable of
painting the position of the collar in a map, depend-
ing on the GPS data, or the signal strength received
from the collar, using a log-normal distance estima-
tor (Ahmed et al., 2011). Besides, the software emits
a beep whose pitch depends on the received signal
strength. In order to realize this test, the network of
motes and the GPS device of the collar were disabled.
The collar was placed at maximum distance of 90m,
in a unknown place to the user of the mobile node.
Figure 4: Mobile app screenshot while searching a lost col-
lar. The possible collar location is the red cross. At left side,
the distance estimation, the relative orientation respect the
mobile node and the estimated collar localization.
A Low-power, Reachable, Wearable and Intelligent IoT Device for Animal Activity Monitoring
519
5 RESULTS AND DISCUSSION
In the deployment of the network we observed con-
nection issues between the motes M2 and M3 of Fig.
3 due to the closeness of trees and the high variability
of the signal strength. The RSSI received at the dis-
tance between motes was 10dBi over the sensibility
threshold of the motes, but considering the connec-
tion losses, this margin must be larger.
Regarding the location testing, several tests were
done in the area, being easy to find the collar with the
mobile node in no more than 4 minutes. The acous-
tic clues and the distance estimation were enough to
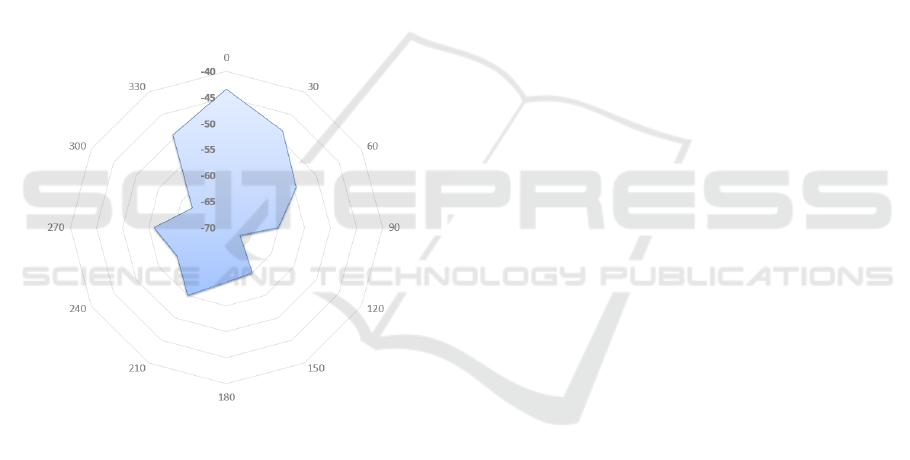
drive the mobile node towards the collar. The direc-
tionality of the antenna was good enough, as can be
seen in Fig. 5. However, the distance estimation is
very dependent on the signal conditions, which de-
pends on the scenario (trees, grass, humidity, build-
ings) and for this reason, no precise information about
location could be obtained.
Figure 5: RSSI values received from a directional antenna,
depending on the angle of orientation.
6 CONCLUSION
In this paper, we have presented an intelligent, low-
power and reconfigurable device powered by a low-
power MCU that is capable of acquiring behavioral
information from its owner by classifying the data ob-
tained from several sensors using an embedded NN
implementation. It sends this output to a coordinator
(base station) which uploads this to a database that
can be accessed through a web portal. The commu-
nication is done using XBee through a WSN where
solar-powered motes route the information from col-
lars to the base station, increasing the coverage area
of the network. The collar is reconfigurable and can
be adapted to the requirements of the scenario by ac-
tivating/deactivating different software functionalities
of the device.
The whole network has been deployed and tested
in Do
˜
nana National Park, where the collar was placed
on horses to monitor their activity and classify be-
tween different gait patterns. Other WSN implemen-
tations like LoRa requires each of the devices to be
connected to the Internet (Adelantado et al., 2017),
which would be difficult in Do
˜
nana National Park
and other environments with reduced WAN connec-
tion. Our system is also scalable and the coverage
area could be expanded by adding more motes to the
network.
Each of the devices that are part of the WSN has
been tested individually and in the setup where the
experiments were done, showing the expected behav-
ior. The information about the gaits that the collar
detected from the horse movement patterns were cor-
rectly sent to the base station and uploaded to the
database, showing an accuracy of 90%.
ACKNOWLEDGEMENTS
This work is supported by the excellence project
from Andalusia Council MINERVA (P12-TIC-1300)
and also by the Spanish government grant (with sup-
port from the European Regional Development Fund)
COFNET (TEC2016-77785-P). The authors would
like to thank R. Soriguer, F. Carro and the EBD-CSIC
for their support in Do
˜
nana National Park. L. Du-
ran is supported by the Empleo Juvenil with support
from EU. The work of J.P. Dominguez-Morales was
supported by a Formaci
´
on de Personal Universitario
Scholarship from the Spanish Ministry of Education,
Culture and Sport.
REFERENCES
Adelantado, F., Vilajosana, X., Tuset-Peiro, P., Martinez,
B., Melia-Segui, J., and Watteyne, T. (2017). Under-
standing the limits of lorawan. IEEE Communications
Magazine, 55(9):34–40.
Ahmed, I., Orfali, S., Khattab, T., and Mohamed, A. (2011).
Characterization of the indoor-outdoor radio propaga-
tion channel at 2.4 ghz. In 2011 IEEE GCC Confer-
ence and Exhibition (GCC), pages 605–608.
Bellini, B. and Amaud, A. (2017). A 5µa wireless platform
for cattle heat detection. In Circuits & Systems (LAS-
CAS), 2017 IEEE 8th Latin American Symposium on,
pages 1–4. IEEE.
Dominguez-Morales, J. P., Rios-Navarro, A., Dominguez-
Morales, M., Tapiador-Morales, R., Gutierrez-Galan,
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
520

D., Cascado-Caballero, D., Jimenez-Fernandez, A.,
and Linares-Barranco, A. (2016). Wireless sensor net-
work for wildlife tracking and behavior classification
of animals in do
˜
nana. IEEE Communications Letters,
20(12):2534–2537.
Gutierrez-Galan, D., Dominguez-Morales, J., Miro-
Amarante, L., Gomez-Rodriguez, F., Dominguez-
Morales, M., Rivas-Perez, M., Jimenez-Fernandez,
A., and Linares-Barranco, A. (2017a). Semi-wildlife
gait patterns classification using statistical methods
and artificial neural networks. In Neural Networks
(IJCNN), 2017 International Joint Conference on,
pages 4036–4043. IEEE.
Gutierrez-Galan, D., Dominguez-Morales, J. P., Cerezuela-
Escudero, E., Rios-Navarro, A., Tapiador-Morales,
R., Rivas-Perez, M., Dominguez-Morales, M.,
Jimenez-Fernandez, A., and Linares-Barranco, A.
(2017b). Embedded neural network for real-time ani-
mal behavior classification. Neurocomputing.
He, D. and Zeadally, S. (2015). An analysis of rfid authen-
tication schemes for internet of things in healthcare
environment using elliptic curve cryptography. IEEE
Internet of Things Journal, 2(1):72–83.
Lindsay, J. and Reade, W. (2006). Rfid system and method
for tracking food freshness. US Patent 6,982,640.
Memon, M. H., Kumar, W., Memon, A., Chowdhry, B. S.,
Aamir, M., and Kumar, P. (2016). Internet of things
(iot) enabled smart animal farm. In Computing for
Sustainable Global Development (INDIACom), 2016
3rd International Conference on, pages 2067–2072.
IEEE.
Miorandi, D., Sicari, S., Pellegrini, F. D., and Chlamtac, I.
(2012). Internet of things: Vision, applications and
research challenges. Ad Hoc Networks, 10(7):1497 –
1516.
Nadimi, E. S., Jørgensen, R. N., Blanes-Vidal, V., and
Christensen, S. (2012). Monitoring and classifying
animal behavior using zigbee-based mobile ad hoc
wireless sensor networks and artificial neural net-
works. Computers and Electronics in Agriculture,
82:44–54.
Nadimi, E. S., Søgaard, H., Bak, T., and Oudshoorn, F. W.
(2008a). Zigbee-based wireless sensor networks for
monitoring animal presence and pasture time in a strip
of new grass. Computers and electronics in agricul-
ture, 61(2):79–87.
Nadimi, E. S., Søgaard, H. T., and Bak, T. (2008b). Zigbee-
based wireless sensor networks for classifying the be-
haviour of a herd of animals using classification trees.
Biosystems engineering, 100(2):167–176.
Rahmani, A. M., Thanigaivelan, N. K., Gia, T. N., Grana-
dos, J., Negash, B., Liljeberg, P., and Tenhunen, H.
(2015). Smart e-health gateway: Bringing intelligence
to internet-of-things based ubiquitous healthcare sys-
tems. In 2015 12th Annual IEEE Consumer Commu-
nications and Networking Conference (CCNC), pages
826–834.
University of California, B. (2009). A packet sniffer that
forwards 802.15.4 frames from wireless channel over
serial to a pc.
Wei, C. and Li, Y. (2011). Design of energy consumption
monitoring and energy-saving management system of
intelligent building based on the internet of things. In
2011 International Conference on Electronics, Com-
munications and Control (ICECC), pages 3650–3652.
Xu, L. D., He, W., and Li, S. (2014). Internet of things in
industries: A survey. IEEE Transactions on Industrial
Informatics, 10(4):2233–2243.
Zanella, A., Bui, N., Castellani, A., Vangelista, L., and
Zorzi, M. (2014). Internet of things for smart cities.
IEEE Internet of Things Journal, 1(1):22–32.
A Low-power, Reachable, Wearable and Intelligent IoT Device for Animal Activity Monitoring
521
