
Tuning Parameters of Differential Evolution: Self-adaptation,
Parallel Islands, or Co-operation
Christina Brester
1,2 a
and Ivan Ryzhikov
1,2 b
1
Department of Environmental and Biological Sciences, University of Eastern Finland, Kuopio, Finland
2
Institute of Computer Science and Telecommunications, Reshetnev Siberian State University of Science and Technology,
Krasnoyarsk, Russia
Keywords: Optimization, Evolutionary Algorithms, Differential Evolution, Tuning Parameters, Self-adaptation, Parallel
Islands, Co-operation, Performance.
Abstract: In this paper, we raise a question of tuning parameters of Evolutionary Algorithms (EAs) and consider three
alternative approaches to tackle this problem. Since many different self-adaptive EAs have been proposed so
far, it has led to another problem of choice. Self-adaptive modifications usually demonstrate different
effectiveness on the set of test functions, therefore, an arbitrary choice of it may result in the poor performance.
Moreover, self-adaptive EAs often have some other tuned parameters such as thresholds to switch between
different types of genetic operators. On the other hand, nowadays, computing power allows testing several
EAs with different settings in parallel. In this study, we show that running parallel islands of a conventional
Differential Evolution (DE) algorithm with different CR and F enables us to find its variants that outperform
advanced self-adaptive DEs. Finally, introducing interactions among parallel islands, i.e. exchanging the best
solutions, helps to gain the higher performance, compared to the best DE island working in an isolated way.
Thus, when it is hard to choose one particular self-adaptive algorithm from all existing modifications proposed
so far, the co-operation of conventional EAs might be a good alternative to advanced self-adaptive EAs.
1 INTRODUCTION
Evolutionary algorithms (EAs) are flexible and
widely applicable tools for solving optimization
problems. Their effectiveness has been demonstrated
in many studies and international competitions on
black-box optimization problems. Nowadays, EAs
are successfully used in machine learning, deep
learning, and reinforcement learning. Therefore,
more and more effective heuristics and meta
heuristics are being developed and their beneficial
properties and convergence are being investigated in
the scientific community.
In spite of all positive features, EAs require tuning
a set of parameters for their effective work, which is
a non-trivial task even for the experts (Eiben et al.,
2007). The main issue is that optimal values of the
parameters tuned differ for various problems. The
“No Free Lunch” theorem proves this phenomenon
and claims that there is no one search algorithm
a
https://orcid.org/0000-0001-8196-2954
b
https://orcid.org/0000-0001-9231-8777
working best for any kind of optimization problem
(Wolpert and Macready, 1997). As a result, an idea of
parameter self-adaption has been proposed to find
their proper values for the problem solved during the
algorithm execution (Meyer-Nieberg and Beyer,
2007).
The primary approaches to the EA self-adaptation
are normally based on one of the following concepts.
Firstly, it might be a deterministic scenario, according
to which parameters are changed during iterations. As
an example, in Daridi’s work, a mutation probability
is presented as a function of a generation number
(Daridi, 2004). Secondly, several types of genetic
operators (different implementations of selection,
crossover, and mutation) may compete for resources
based on their effectiveness in previous generations.
For instance, Khan and Zhang (2010) used two
crossover operators to produce offspring which
probabilities of being applied were recalculated in
each generation based on the success rate (how many
times a new solution outperformed at least one of the
Brester, C. and Ryzhikov, I.
Tuning Parameters of Differential Evolution: Self-adaptation, Parallel Islands, or Co-operation.
DOI: 10.5220/0008495502590264
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 259-264
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
259

parents). Alternatively, parameters of genetic
operators might be included in a chromosome, evolve
in iterations and be applied to generate the next
candidate solution (Pellerin et al., 2004).
However, a booming interest in self-adaptation
has resulted in many proposed techniques and again
caused a problem of choice. Moreover, in some
approaches, self-adaptive operators use a number of
thresholds to switch between different types of a
genetic operator. These thresholds also should be
selected properly. On the other hand, due to the
impressive computing power available nowadays, it
became possible to test various settings of the
algorithm in parallel, which might be an alternative
approach to self-adaptation.
Nevertheless, in some studies, it has been shown
that at different stages of optimization, certain types
of genetic operators are beneficial for the search
(Tanabe and Fukunaga, 2013). Self-adaptive EAs
support this replacement of operators in generations,
whereas EAs with diverse settings run in parallel do
not provide this option. At the same time,
incorporating a migration process into parallel EAs,
i.e. the exchange of solutions, and creating a co-
operation of EAs with different settings allows
introducing candidate solutions generated by various
EAs operators in the population.
Therefore, in this study, we compare several self-
adaptation techniques with parallel EAs and their co-
operation having three variants of its topology based
on the example of a Differential Evolution (DE)
algorithm, which needs tuning CR and F parameters
(Storn and Price, 1997). Since DE is one of the most
effective and widely used heuristics, it is essential to
investigate different approaches to tune its key
parameters.
2 METHODS COMPARED
The general DE scheme for a minimization problem
contains the following steps:
Randomly initialize the population of size M: X
= {x
1
, …, x
M
};
Repeat the next operations until the stopping
criterion is satisfied:
- For each individual x
i
,
, in the
population do:
1. Randomly select three different individuals from
the population a, b, c (which are also different from
x
i
);
2. Randomly initialize an index
, where
n is the problem dimensionality;
3. Generate a mutant vector. For each ,
define
. Next, if
or , then
=
, otherwise
. CR and F
are the DE parameters.
4. If
, then replace
.
As a basis of this work, we used algorithms
implemented in the PyGMO library (Biscani et al.,
2018). There are two self-adaptive versions of DE
called SaDE and DE1220, wherein two variants of CR
and F control and adaptation are available,
particularly, jDE (Brest et al., 2006) and iDE (Elsayed
et al., 2011). In SaDE, a mutant vector is produced
using a DE/rand/1/exp strategy (by default and in our
experiments too), whereas in DE1220 the mutation
type is coded in a chromosome and also adapted.
In addition to self-adaptive algorithms, we applied
a conventional DE with different values of CR and F
parameters: and
Using the island class of PyGMO,
we could run DEs with different settings in parallel
threads to save computational time.
Next, we extended the PyGMO library with a set
of functions implementing the migration process
among the parallel islands. In this study, three
topologies of the island co-operation are investigated:
Ring, Random, and Fully Connected. After each T
m
generations, N
best
individuals with the highest fitness
from every population are sent to other islands to
substitute N
worst
solutions having the lowest fitness
there.
In the Ring topology (Figure 1), at every
migration stage, solutions are sent along the same
route, i.e. from the i-th island to the (i+1)-th one.
Island numbers keep constant during the search.
Every (i+1)-th accepts min(N
best
i
, N
worst
i+1
) solutions
to replace the worst individuals in its population.
Figure 1: Ring topology.
In the Random topology (Figure 2), at each
migration stage, for every j-th island, where
and is the total number of islands in the co-
operation, the i-th island, sending the best individuals
to it, is chosen randomly so that . The j-th island
accepts min(N
best
i
, N
worst
j
) solutions.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
260
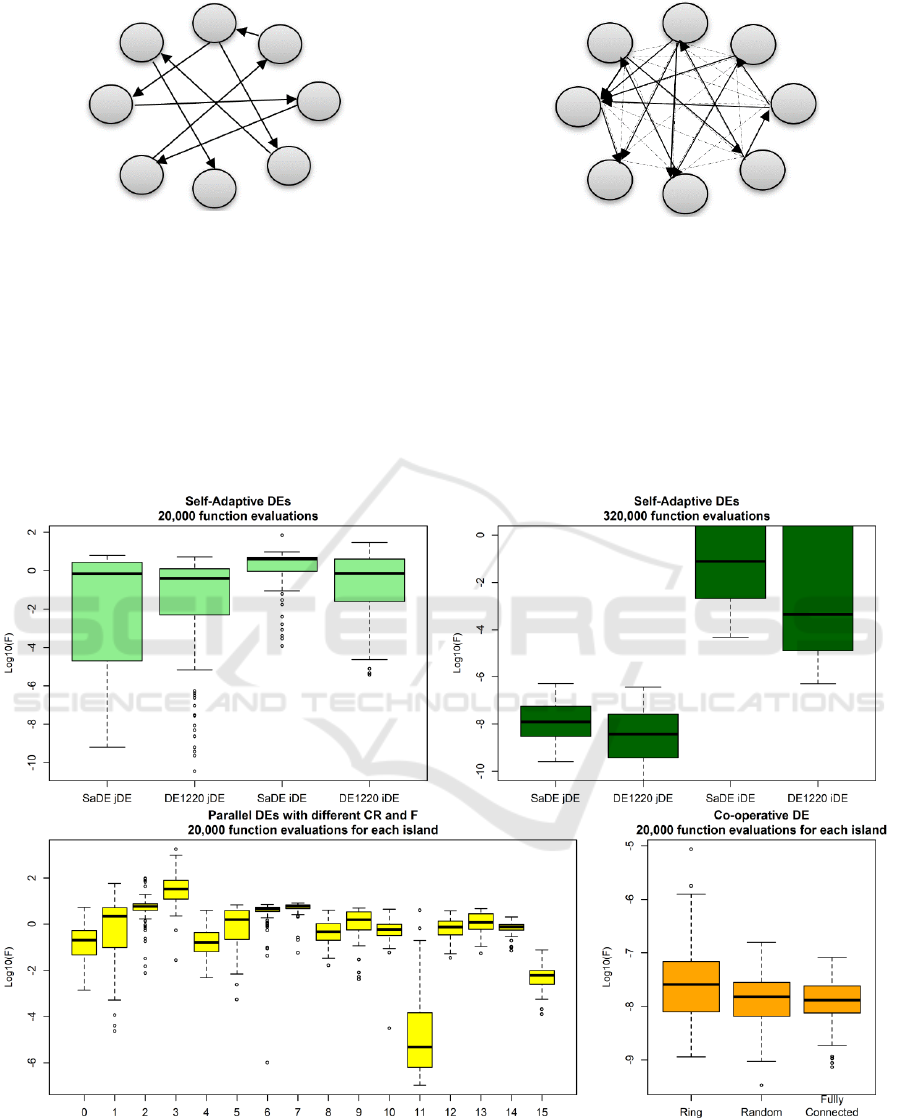
Figure 2: Random topology.
In the Fully Connected topology (Figure 3), every
j-th island randomly selects N
worst
j
solutions from the
united set of the best individuals from all other
islands. Thus, at each migration stage, every island is
likely to get solutions from several other islands.
These three groups of DE (self-adaptive,
conventional with different CR and F, and co-
operative) were tested using the generalized n-
dimensional Rosenbrock function (n = 10, 30, 100):
Figure 3: Fully Connected topology.
(1)
The global optimum is
,
Figure 4: Experimental results for the Rosenbrock function (n = 10).
Tuning Parameters of Differential Evolution: Self-adaptation, Parallel Islands, or Co-operation
261
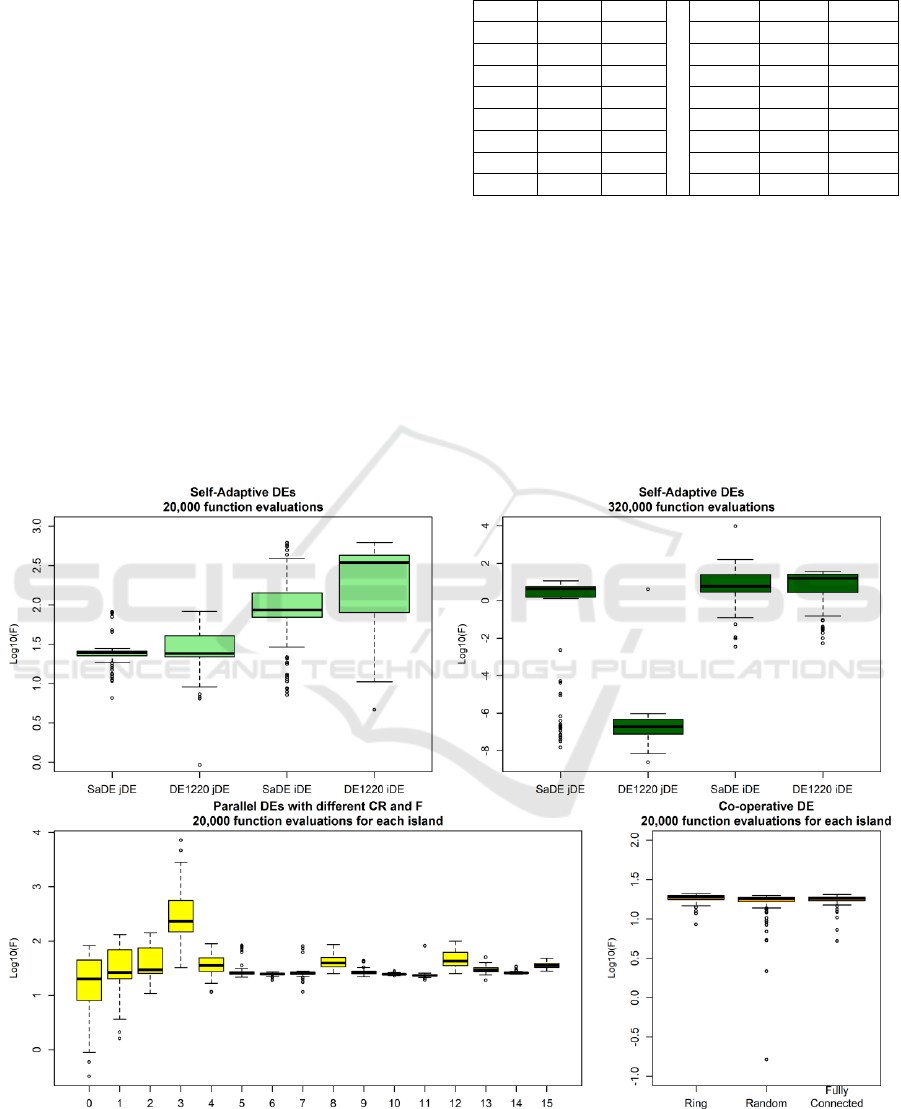
3 EXPERIMENTAL RESULTS
Four self-adaptive DEs, namely, SaDE and DE1220
with the jDE variant of self-adaptation, SaDE and
DE1220 with the iDE variant of self-adaptation, were
applied to solve the Rosenbrock problem with 10
(Figure 4), 30 (Figure 5), and 100 (Figure 6)
variables. In the first experiment, the amount of
resources for each algorithm was 20,000 function
evaluations. Every algorithm was run 100 times.
As one can see, these self-adaptive DEs
demonstrate different effectiveness on the problems
solved, which implies that there is also a necessity to
choose an effective self-adaptive modification of the
algorithm from various existing variants.
Next, we ran 16 variants of the conventional DE
algorithm in parallel (again 100 times), with different
values of CR and F. Each island was provided with
the same amount of resources: 20,000 function
evaluations. In Figures 4–6, we denoted the following
pairs of (CR; F) with numbers 0…15:
Table 1: Values of CR and F parameters tested.
ID
CR
F
ID
CR
F
0
0.3
0.3
8
0.3
0.7
1
0.5
0.3
9
0.5
0.7
2
0.7
0.3
10
0.7
0.7
3
0.9
0.3
11
0.9
0.7
4
0.3
0.5
12
0.3
0.9
5
0.5
0.5
13
0.5
0.9
6
0.7
0.5
14
0.7
0.9
7
0.9
0.5
15
0.9
0.9
Based on the results obtained, we may conclude
that the conventional DE with many variants of the
tested combinations of CR and F is able to compete
with its self-adaptive modifications and even
outperforms them in some cases. Moreover, due to
available computing resources and possible
parallelization, several conventional DE with various
settings might be easily compared. Therefore, it is
arguable and really depends on the situation, what to
choose, multiple tests or one of self-adaptive
modifications of the algorithm.
Figure 5: Experimental results for the Rosenbrock function (n = 30).
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
262
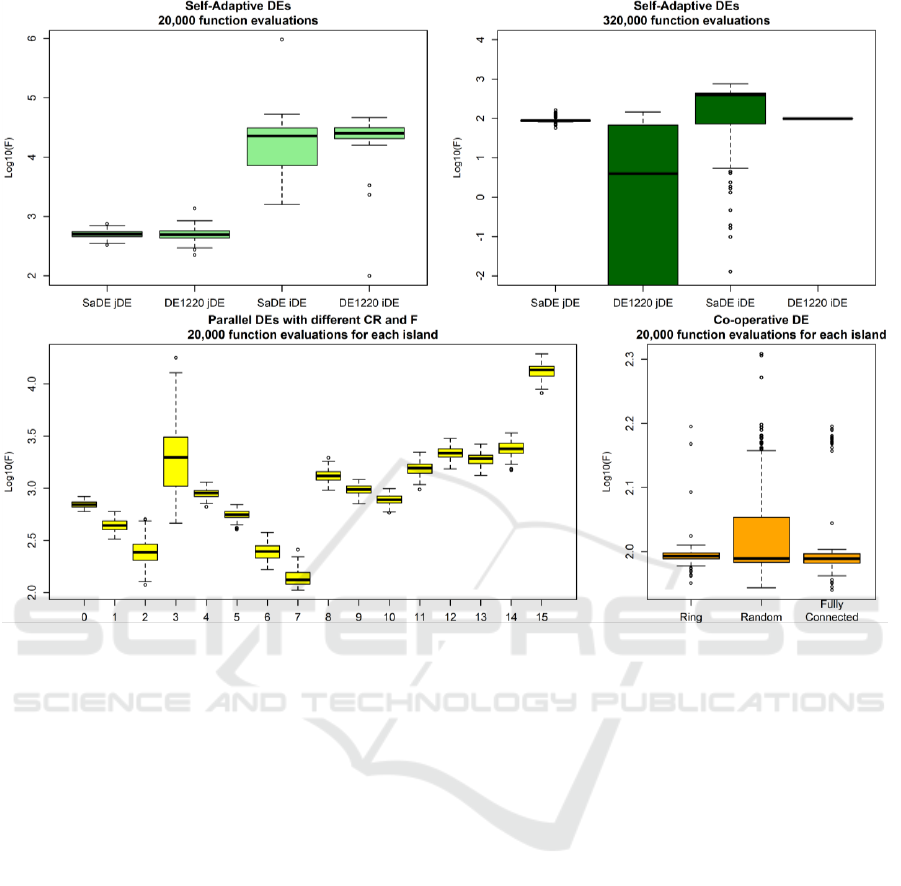
Figure 6: Experimental results for the Rosenbrock function (n = 100).
Then, we allowed the 16 parallel islands with
different values of CR and F to exchange the best
solutions among each other. We investigated three
schemes of the migration process, in particular, Ring,
Random, and Fully Connected Topology. Every
island had the population of 20 individuals evolving
for 1000 generations. The migration parameters were
defined as follows: T
m
= 20, N
best
= N
worst
= 4.
According to the experimental results, we may point
out that interactions among parallel islands are
favorable for the performance of the whole co-
operation since it typically outperforms the best
island evolving in an isolated way. In the experiments
conducted, the fully connected topology has shown
the high performance steadily.
Moreover, the effectiveness of the presented co-
operation is often comparable with the results of self-
adaptive modifications having the same amount of
resources as the whole co-operation (16 x 20,000). In
comparison with self-adaptive DEs, the co-operation
of conventional DEs has a parallel structure and
requires less computational time for the algorithm
execution. Furthermore, it is quite interesting that
using just primitive versions of DE and applying
migration, we can achieve the same effectiveness as
some recently developed and advanced self-adaptive
modifications demonstrate.
4 CONCLUSIONS
In this study, we raised a question of tuning
parameters of EAs and compared three approaches,
which were self-adaptation, testing different settings
in parallel islands, and co-operation. To ponder this
question and investigate these approaches, we chose
one of the most popular EAs nowadays, namely,
Differential Evolution.
Firstly, the self-adaptive modifications of DE
showed different performances on the test problems.
This implies that the solution quality depends on our
choice of the self-adaptation strategy, which typically
has some tuned parameters too.
Next, due to possible parallelization, various
settings of DE might be checked in parallel threads
and the best combination of them is likely to provide
better results than some self-adaptive modifications.
However, without parallelization, it takes more time,
and sometimes it is not the option.
Tuning Parameters of Differential Evolution: Self-adaptation, Parallel Islands, or Co-operation
263

Finally, we showed that the migration process
among parallel islands of conventional DEs with
different CR and F helped to achieve the higher
performance than the best of these islands showed
while working in an isolated way. The co-operation
of conventional DEs has a parallel structure and
allows reducing computational time, whereas some
self-adaptive DEs do not show better results even
having the same amount of resources as the whole co-
operation uses. Therefore, the co-operation of
conventional DEs might be considered as an
alternative to advanced self-adaptive DEs in some
cases.
In the future work, we are planning, firstly, to test
co-operations of advanced self-adaptive DEs and,
secondly, make islands compete for resources in the
co-operation. More test problems will be used for that
comparative analysis.
ACKNOWLEDGEMENTS
The reported study was funded by Russian
Foundation for Basic Research, Government of
Krasnoyarsk Territory, Krasnoyarsk Regional Fund
of Science, to the research project: 18-41-242011
«Multi-objective design of predictive models with
compact interpretable strictures in epidemiology».
REFERENCES
Biscani, F., Izzo, D., Märtens, M., 2018. Pagmo 2.7 URL
https://doi.org/10.5281/zenodo.1217831
Brest, J., Greiner, S., Bošković, B., Mernik, M., Zumer, V.,
2006. Self-adapting control parameters in differential
evolution: a comparative study on numerical
benchmark problems. IEEE Transactions on
Evolutionary Computation, vol. 10, no. 6, pp. 646-657.
Daridi, F., Kharma, N., Salik, J., 2004. Parameterless
genetic algorithms: review and innovation. IEEE
Canadian Review, (47), pp. 19–23.
Eiben, A., Michalewicz, Z., Schoenauer, M., Smith, J.,
2007. Parameter Control in Evolutionary Algorithms.
In: Lobo F., Lima C., Michalewicz Z. (eds.) Parameter
Setting in Evolutionary Algorithms, Springer, pp. 19–
46.
Elsayed, S.M., Sarker, R.A., Essam, D.L., 2011.
Differential evolution with multiple strategies for
solving CEC2011 real-world numerical optimization
problems. In Evolutionary Computation (CEC), 2011
IEEE Congress on, pp. 1041-1048.
Meyer-Nieberg, S., Beyer, H.G., 2007. Self-Adaptation in
Evolutionary Algorithms. In: Lobo F.G., Lima C.F.,
Michalewicz Z. (eds) Parameter Setting in Evolutionary
Algorithms. Studies in Computational Intelligence, vol.
54. Springer, Berlin, Heidelberg.
DOI https://doi.org/10.1007/978-3-540-69432-8_3
Pellerin, E., Pigeon, L., Delisle, S., 2004. Self-adaptive
parameters in genetic algorithms. Proc. SPIE 5433,
Data Mining and Knowledge Discovery: Theory, Tools,
and Technology VI. DOI: 10.1117/12.542156
Storn R. and Price K., 1997. Differential evolution—a
simple and efficient heuristic for global optimization
over continuous spaces. Journal of Global
Optimization, vol. 11, no. 4, pp. 341–359.
Tanabe R. and Fukunaga A., 2013. Success-history based
parameter adaptation for Differential Evolution. 2013
IEEE Congress on Evolutionary Computation, Cancun,
2013, pp. 71-78. doi: 10.1109/CEC.2013.6557555
Wolpert, D.H. and Macready, W.G., 1997. No Free Lunch
Theorems for Optimization. IEEE Transactions on
Evolutionary Computation, vol. 1, no. 1, pp. 67–82.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
264
