
PREVISUALIZATION IN ROBOTICS: AN ATOMIC APPROACH
Mauno R
¨
onkk
¨
o
University of Kuopio, Department of Computer Science
P.O.Box 1627, 70211 Kuopio, Finland
Keywords:
Robotics, previsualization, modelling, emergent dynamics, simulation, formal methods.
Abstract:
In this paper, we discuss use of previsualization in robotics. In previsualization, a computer animates a highly
underspecified model; thus, helping the designers to detect missing components. When applied to robotics,
previsualization should reveal detailed dynamics that is not explicitly specified in the model. In particular,
it should reveal interaction dynamics of the physical components. Such a requirement is non-trivial. In this
paper, we investigate an atomic approach that uses emergent dynamics to reveal the interaction dynamics.
The approach is based on use of atoms that obey simple, compositional interaction laws. The laws produce
emergent interaction dynamics for physical components composed of atoms. As the main contribution, we
shall illustrate how the atomic approach, despite its simplicity, captures compactly non-trivial settings, and
reveals effortlessly intricate dynamics that are otherwise considered too laborious for modelling.
1 INTRODUCTION
Previsualization is a design technique used originally
in film industry (Ferster, 1998). In previsualization, a
computer animates an underspecified scene. The an-
imation reveals quickly, if the scene is missing some
key components, or if the dynamics is not as desired.
In this paper, we generalize the idea of previsual-
ization to robotics (Arkin, 1998). In robotics, it is
used as a design tool for improving a model until it is
detailed enough for formal analysis and prototyping.
Unlike simulation (Mosterman, 1999), previsual-
ization does not deal with a detailed model; rather, the
model is highly underspecified and details appear as
emergent dynamics (Odell, 1998; Arkin, 1998). Con-
sequently, previsualization does not reveal “exact” re-
sults, although the results are rich in realistic details.
When using previsualization in robotics, we wish
to avoid specifying explicit interactions between the
physical components in the model. One reason is that,
during previsualization, the specifics of the compo-
nents are still unknown. Another reason is that the
number of required interaction equations is quadratic
to the number of components in the system, for in-
stance, 100 components require 10 000 interaction
equations.
One way of avoiding specifying the interaction
equations is to use emergent dynamics to reveal it.
However, this is not trivial in robotics due to inherent
compositional diversity. In robotics, there are many
different kinds and shapes of components interacting
with each other (Arkin, 1998). In addition, the in-
teraction dynamics itself shows various kinds of mo-
tions, rotations, collisions, and other kinematics.
Mere encoding of the text-book equations on dy-
namics, like those found in (Young and Freedman,
2000) and in (Thornton and Marion, 2004), is not
enough, as they describe the dynamics in isolation.
Figuring out the precise interaction equations, on the
other hand, is not reasonable, since the specifics of
the components are not known ahead of the previsu-
alization. Nevertheless, previsualization must some-
how capture detailed interaction dynamics.
As a solution, we propose in this paper an atomic
approach, where interaction dynamics of the physical
components appear as emergent dynamics. The ap-
proach is based on use of atoms
1
that are indivisible
particles of constant shape and mass. The atomic ap-
proach is, thus, a specific variant of a particle system
(Reeves, 1983; Witkin, 1997).
1
The notion of atoms, here, differs from the notion of
atoms in modern physics (Young and Freedman, 2000), as
well as from the notion of atoms put forth by Greek philoso-
phers Democritus and Leucippus around 400 BC.
110
Rönkkö M. (2004).
PREVISUALIZATION IN ROBOTICS: AN ATOMIC APPROACH.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 110-117
DOI: 10.5220/0001127301100117
Copyright
c
SciTePress

Atoms may move, resist movement, be bound to
each other, and collide with each other. For these
dynamics, there are simple equations that are also
compositional. Moreover, these equations are enough
to produce emergent dynamics capturing interactions
between physical components composed of atoms, re-
gardless of the shape of the components (R
¨
onkk
¨
o,
2003b).
An advantage of the atomic approach is that it is
computationally light. A three dimensional model can
be computed and rendered on screen in real-time.
An additional advantage of the atomic approach is
that it supports inclusion of software components to
the model. For instance, we could add a neural net
to the model for controlling some physical compo-
nents. Then, the neural net interacts with the physical
components by manipulating the forces on the corre-
sponding atoms. In this way, we do not need to state
explicit interaction dynamics in the model, and we
can experiment with different software components
to see their effect on the global, behavioral dynam-
ics (Arkin, 1998; Reynolds, 1987).
As the main contribution, we shall illustrate in this
paper how the atomic approach, despite its simplicity,
captures compactly non-trivial settings, and reveals
effortlessly intricate dynamics that are otherwise con-
sidered too laborious for modelling.
Overview. We start by formalizing the atomic ap-
proach in Section 2. In Section 3, we discuss and il-
lustrate modelling with strings of atoms. In Section
4, we discuss and illustrate modelling with planes of
atoms. In Section 5, we discuss and illustrate some
advanced emergent properties, such as friction and ro-
tation. Finally, in Section 6, follows the conclusion.
2 THE ATOMIC APPROACH
In the atomic approach, a model consists of a fixed
number of atoms and forces. An atom is an indepen-
dent and indivisible particle. Based on the defined
forces, the atoms in the model may move, resist move-
ment, be bound to each other, and collide with each
other.
2.1 An Atom
An atom has only four properties: shape, mass, posi-
tion, and velocity. Each atom has the same constant
shape of a unit ball, and the same unit mass. Only the
position and the velocity may vary from atom to atom;
however, even these values are bound by the model of
motion.
As an atom exists in R
3
-space, we use three dimen-
sional vectors (Adams, 1999) to capture the properties
of an atom. Let ~c denote the position of an atom, i.e.,
the displacement of the center of the atom from the
origin. Then, the magnitude of ~c, i.e., |~c|, gives the
distance of the center of the atom to the origin.
An atom occupies the set P of points in R
3
, where
|~p −~c| ≤ 1 holds for any ~p in P . Within this space,
the unit mass of an atom is evenly distributed. Con-
sequently, according to (Young and Freedman, 2000),
the center of an atom is also its center of mass.
We do not, however, consider atoms as objects of
dense matter; on the contrary, atoms are objects of
sparse matter. Therefore, several atoms may overlap
in space without any interference, if so desired.
2.2 Model of Motion
Atoms follow a trivial model of motion. A change in
the position of an atom is determined by its velocity.
A change in the velocity of an atom, in turn, is deter-
mined by an impulse on it. The impulse is the sum of
all forces on the atom.
As shown in (R
¨
onkk
¨
o, 2003b), the model of mo-
tion is obtained from the trivial model of motion with
acceleration. First, Euler’s method (Zill and Cullen,
1997) is applied to obtain an approximation equation.
Then, as the approximation equation operates in dis-
crete time on atoms with a unit mass, we may sub-
stitute the acceleration term in the equation with an
impulse term (Young and Freedman, 2000).
Formally, the obtained model of motion is a dif-
ference equation (Zill and Cullen, 1997). Let n and
n + 1 denote two successive iteration rounds, and τ
denote a reasonably small, fixed, time step. Also, let
~c(n), ~v(n), and
~
j(n) denote the center of an atom, its
velocity, and the impulse on the atom in the iteration
round n. Then, the model of motion is:
~v(n + 1) = ~v(n) +
~
j(n)
~c(n + 1) = ~c(n) + τ ·~v(n + 1)
Here, the impulse
~
j(n) is the sum of forces on the
atom in the iteration round n. The forces are com-
puted based on the position and velocity of atoms in
the iteration round n.
The model of motion above is a refinement of
that presented in (R
¨
onkk
¨
o, 2003b). In particular, the
model above provides a more stable motion.
Note that the model of motion for atoms is com-
positional; in particular, it allows us to consider the
position, velocity, and the impulse of an atom inde-
pendently of each other within each iteration round.
2.3 An Impulse
An impulse is, by definition (Young and Freedman,
2000), the sum of forces affecting the velocity. In our
model, there are only four kind of forces: damping
PREVISUALIZATION IN ROBOTICS: AN ATOMIC APPROACH
111

forces, bond forces, collision forces, and other case-
specific external forces.
For simplicity, all the impulses considered in this
paper depend only on the properties of atoms; in par-
ticular, we do not consider here any impulses that de-
pend on the number of the iteration round.
In the sequel, we shall refer to a specific atom in the
model using subscripts. For instance, we shall denote
the center of the i’th atom in the model by ~c
i
, and its
velocity by ~v
i
.
A damping force. A damping force resists the mo-
tion of an atom. Its direction is opposite to the direc-
tion of the velocity, and the magnitude is always less
or equal to the magnitude of the velocity.
Assuming a coefficient m ∈ [0, 1], we define a
damping force
~
fd(i, m) with a magnitude of m·100%
on the i’th atom in the model (R
¨
onkk
¨
o, 2003b):
~
fd(i, m) = −m ·~v
i
A bond force. A bond force maintains a prede-
fined distance between two specific atoms. Gener-
ally speaking, a bond force is modelled as a function
over the desired distance
2
and the current distance
between the two atoms.
We model a bond force with a non-linear function,
because it has better approximation properties than a
linear function (R
¨
onkk
¨
o, 2003b). Assuming a desired
distance r ∈ [0, ∞), we define a bond force
~
fb(i, r, k)
on the i’th atom in the model with respect to the k’th
atom in the model (R
¨
onkk
¨
o, 2003b):
~
fb(i, r, k) = (~c
k
−~c
i
) · (1 − r
2
|~c
k
−~c
i
|
−2
)
Note that a bond force is symmetric, i.e.,
~
fb(i, r, k) = −
~
fb(k, r, i). Thus, a pair of bond forces
preserves Newton’s third law
3
(Young and Freedman,
2000).
A bond force, as defined above, results in acceler-
ating motion. Consequently, an additional force, such
as a damping force, may be needed for the motion to
converge.
Note that an atom may well be bound to many
atoms at the same time. Then, we may consider each
bond independently, and the sum of the bond forces is
the total bond force on the atom. Due to the model of
motion, the bond forces can be evaluated in any order
without affecting the result.
2
We consider only the distance between the centers of
the atoms, as the center of an atom is also its center of mass.
3
The significance of Newton’s third law is that it pre-
serves symmetry in the model. Then, from the model, we
may freely choose one atom, and use it as the center of
events. Due to symmetry, the result is independent of our
choice.
A collision force A collision force affects only
overlapping atoms by pushing them apart. Atoms are
considered to be apart, when their distance exceeds
the sum of their radii, 2.
We model a collision force as a semi-bond force.
Thus, we define a collision force
~
fc(i, k) on the i’th
atom in the model with respect to the k’th atom in the
model (R
¨
onkk
¨
o, 2003b):
~
fc(i, k) = (~c
k
−~c
i
) · min{0, (1 − 4 · |~c
k
−~c
i
|
−2
)}
The collision force is also symmetric; hence, a pair
of collision forces preserves Newton’s third law.
Note that an atom has no materialistic properties,
such as elasticity. Consequently, the collision force
above defines exhaustively a collision between two
atoms. More specifically, it captures an elastic col-
lision (R
¨
onkk
¨
o, 2003b). An inelastic collision can,
thus, never occur between two atoms without any ad-
ditional forces. This does not, however, preclude an
inelastic collision between components composed of
atoms, as we shall see later in the examples.
Similarly to the bond forces, there can be many col-
lision forces on an atom at the same time. Then, we
may consider each collision independently, and the
sum of the collision forces is the total collision force
on the atom. Due to the model of motion, the collision
forces can be evaluated in any order without affecting
the result.
Case-specific external forces. We do not attempt
to formalize other case-specific external forces. The
reason for this is simply the overwhelming variety of
such forces. Examples of case-specific external forces
are, among others, gravity, impulses originating from
various power sources, and impulses used for visual-
ization purposes, i.e., forcing the atoms to move into
desired direction to reveal the emergent dynamics of
that motion.
2.4 Modelling with Atoms
Modelling with atoms is simple. In a model, we de-
fine for each atom
1. its initial position and velocity
2. the forces on it
The model of motion is then used to compute the po-
sition and the velocity of the atom in the next iteration
round.
In a model, bond forces are used to compose com-
ponents from atoms. The number of bond forces
per atom defines also the rigidness of the component
(R
¨
onkk
¨
o, 2003b). Collision forces, in turn, are used
for defining which atoms (of the components) may
collide with each other.
ICINCO 2004 - ROBOTICS AND AUTOMATION
112
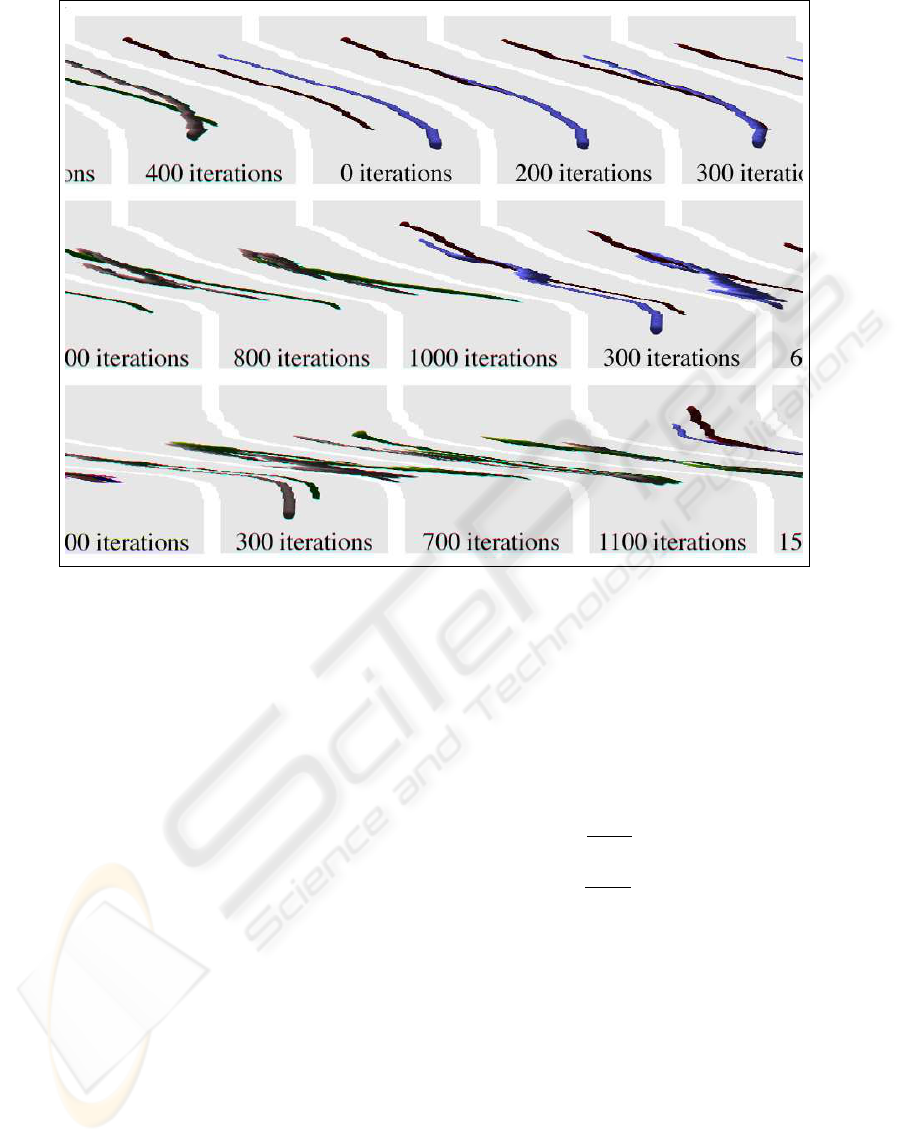
Figure 1: Visualization of colliding rods and threads. The top row shows a collision of two rods, the middle row shows a
collision of a rod and a thread, and the bottom row shows a collision of two threads. The computed iteration rounds are
indicated in each image. The initial configuration, shown in the leftmost image in the top row, is the same for each collision.
3 MODELLING WITH STRINGS
OF ATOMS
For modelling components like rods, threads, tri-
angles, and rings, we use strings of atoms. In a
string, bond forces are used for defining the shape
of the component and the rigidness of the component
(R
¨
onkk
¨
o, 2003b). For brevity, we shall consider only
threads and rods in this section.
We exemplify use of strings of atoms by visualizing
non-trivial collisions of rods and threads. In these ex-
amples, we do not consider any damping forces; thus,
the rods and threads behave as if they were in space.
For clarity, we limit the investigation to collisions of
two components at a time.
Both a rod and a thread are modelled using a string
of 70 atoms. The colliding strings are aligned diago-
nally with respect to the y and z-axes. Also, the align-
ment of the strings with respect to each other is di-
agonal and non-symmetric, as shown in the leftmost
image in the top row in Figure 1.
The atoms in a string are initially positioned so that
five neighboring atoms overlap, to give an impression
of dense material (R
¨
onkk
¨
o, 2003b). The two strings
are then set to collide by giving them an opposite ini-
tial velocity along the x-axis.
The impulse on an atom in a string is the sum of
bond forces and collision forces. In a rod, each atom
is bound to every other atom, whereas, in a thread,
an atom is bound only to its neighboring atoms. For-
mally, in a rod, the total bond force on the i’th atom
is
P
69
j=0
~
fb(i,
√
0.125, j) for all j 6= i. Correspond-
ingly, the total bond force on the i’th atom in a thread
is
P
69
j=0
~
fb(i,
√
0.125, j) for all |j − i| = 1.
The total collision forces prevent the atoms in the
colliding strings from slipping through each other.
Thus, there is a collision force on the i’th atom in
a string is
P
69
j=0
~
fc(i, j), where j refers to atoms in
the other string. In addition, we also wish to prevent
the non-overlapping atoms within a string from slip-
ping through themselves. Therefore, there is an ad-
ditional collision force on the i’th atom in a string:
P
69
k=0
~
fc(i, k) for all |k − i| ≥ 8, where k refers to
atoms in the same string. The total collision force on
an atom in a string is then the sum of these two colli-
sion forces.
Figure 1 visualizes three different non-trivial colli-
sions involving rods and threads. The top row shows
a collision of two rods, the middle row shows a colli-
PREVISUALIZATION IN ROBOTICS: AN ATOMIC APPROACH
113

Figure 2: Visualization of two bouncing balls on an elastic surface. Initially both balls are in the air, falling down. The
computed iteration rounds are indicated in each image.
sion of a rod and a thread, and the bottom row shows
a collision of two threads. The initial configuration is
the same in each case, shown in the leftmost image in
the top row.
It is important to notice that we do not explicitly
specify in the model how rods or threads collide. We
only state which atoms of the two strings may collide
with each other. Still, the collision dynamics seem
very natural in each case, although they are entirely
emergent.
Figure 1 reveals also other intricacies that we do not
explicitly address in the model. Namely, the top row
shows how the impact causes minute vibrations to the
colliding rigid bodies. Also, the middle row shows
how a non-rigid body wraps around a rigid body in
a collision. The collision is, thus, inelastic. Still, as
explained earlier, a collision force between two atoms
as such captures only an elastic collision. An extreme
of an inelastic collision is shown in the bottom row of
the figure, where the collision of two non-rigid bodies
lead to a severe entanglement.
The model of colliding threads and rods is com-
putationally light; it can be computed and rendered
in real-time. For instance, a modest 500MHz Pow-
erPC G3-processor computes 4000 iteration rounds in
about 3.2 seconds.
When considering robotics, this example shows
that the atomic approach supports modelling and pre-
visualization of materialistic properties. For instance,
we could model and previsualize a robot lifting non-
rigid components and then transporting them to some
other location. Such a previsualization would reveal
in real-time how gravity affects the non-rigid compo-
nents during the process.
4 MODELLING WITH PLANES
OF ATOMS
For modelling surfaces we use planes of atoms. In a
plane, bond forces are used for defining the shape and
the rigidness of the surface.
We exemplify use of planes of atoms by visualizing
a non-trivial model, where two balls fall and bounce
on an elastic surface. The gravitational force affects
only the balls; thus, the surface acts as if it was a cloth
floating on water.
The balls are modelled using single atoms. The
surface is modelled using a square with a side of 25
atoms; thus, the index n(x, y) of an atom at coordi-
nate (x, y) in the surface is 25y + x.
The two balls reside initially above the surface as
indicated in Figure 2. The impulse on a falling ball
is the sum of a constant gravity force, and collision
forces. The collision forces cover collisions between
the two balls, and between all the atoms in the surface.
For instance, the total collision force on one of the
falling balls is
~
fc(i, j) +
P
24
x=0
P
24
y=0
~
fc(i, n(x, y)),
where i refers to the falling ball, j refers to the other
falling ball, and n(x, y) refers to an atom in the sur-
face.
The atoms in the surface are initially overlapping
and aligned along x and y-axes around the origin as
shown in Figure 2. The initial distance, d(i, j, x, y),
between two atoms at coordinates (i, j) and (x, y) in
the surface is given by
p
(i−x)
2
+(j−y)
2
. We con-
sider this also the desired distance between the two
atoms.
The impulse on an atom in the surface is the sum
of bond forces and collision forces. Since the sur-
ICINCO 2004 - ROBOTICS AND AUTOMATION
114

face is considered elastic, an atom is bound only to
its neighboring atoms. Hence, the total bond force
on an atom at coordinate (i, j) in the surface is
P
24
x=0
P
24
y=0
~
fb(n(i, j), d(i, j, x, y), n(x, y)) for all
0 < d(i, j, x, y) < 2. Since we do not consider colli-
sions between the atoms in the surface, the total col-
lision force on an atom at coordinate (i, j) in the sur-
face is simply
~
fc(n(i, j), k) +
~
fc(n(i, j), l), where k
and l refer to the falling balls.
Figure 2 visualizes the bouncing of the balls on
the elastic surface. The images in the figure clearly
show how the emergent dynamics reveals realistic de-
tails that we do not explicitly state in the model. For
instance, both of the balls bounce from the surface;
yet, we only define which atoms may collide in the
model. Also, when the balls bounce from the surface,
they generate ripples that gradually progress through-
out the entire surface. This is clearly visible in im-
ages after 250 and 350 iterations. Also, once a ball is
at rest on the surface, the surface caves in due to the
gravity force on the ball. This can be observed from
the images after 450 and 700 iterations. Lastly, as the
surface becomes partially tilted, the balls start sliding
on it. As there is nothing to stop the surface from tilt-
ing, the balls eventually fall out of the surface. This
can be observed from the last image in the figure.
This model is also computationally light; it can be
computed in and rendered in real-time. For instance,
a modest 500MHz PowerPC G3-processor computes
4000 iteration rounds in about 8.3 seconds.
When considering robotics, this example shows
that the atomic approach supports modelling of soft
and elastic surfaces. For instance, we could model
and previsualize a robot moving on an elastic surface.
Such a model could be used for analysing how vari-
ous cruising algorithms function, when the landscape
is no longer even, and when the landscape caves in
underneath the robot.
5 EMERGENT PROPERTIES:
FRICTION AND ROTATION
The advantage of using emergent dynamics in pre-
visualization is that it captures many physical phe-
nomena on its own. Thus, we may omit them in the
model entirely. Some of such phenomena are vibra-
tion, bouncing, friction, and rotation.
We exemplify emergent friction and rotation by vi-
sualizing a non-trivial model, where a ring is dropped
on a surface. The surface is slightly tilted, so that
when the ring bounces on the surface, it gains mo-
mentum and starts rolling. Rolling is due to emerging
friction between the ring and the surface. We show
also two other variants of this example; one, where
the ring is elastic, and another, where the surface soft
like a wet ground.
The ring is modelled as a specific string of atoms,
whereas the surface is modelled as a plane of atoms.
Initially the ring is above the surface and falls down
due to gravity. The initial configuration is shown in
the leftmost image in the top row in Figure 3.
The ring consists of 20 atoms. The atoms are par-
tially overlapping, and form a perfectly aligned ring.
More specifically, the i’th atom of the ring resides at
(4 cos(
iπ
10
)−4.3, 6+4 sin(
iπ
10
), 0). In such a ring, the
distance, d(i, j), between the i’th and j’th atom is
given by
q
(4 − 4 cos(
|i−j|π
10
))
2
+ (4 sin(
|i−j|π
10
))
2
.
We consider this also the desired distance between the
two atoms.
The impulse on an atom in the ring is the sum of a
constant gravity force, and a number of bond forces
and collision forces. The number of the bond forces
in the ring depends on the elasticity of the ring. For
an elastic ring, one atom is bound only to 8 neighbor-
ing atoms in the ring. Let n(i) denote the index of the
i’th atom in the ring, i.e., n(i) = (20 + i) mod 20.
Then, the total bond force on the i’th atom in the
ring is
P
i+4
j=i−4
~
fb(i, d(i, n(j)), n(j)) for all i 6= j.
For an inelastic ring, the total bond force is simply
P
i+9
j=i−9
~
fb(i, d(i, n(j)), n(j)) for all i 6= j. The col-
lision forces, on the other hand, capture the collision
of an atom in the ring with an atom in the surface.
Thus, the total collision force on the i’th atom in the
ring is
P
288
j=0
~
fc(i, j), where j refers to atoms in the
surface.
The tilted surface is modelled using a square with a
side of 17 atoms; thus, the index n(x, y) of an atom at
coordinate (x, y) is 17y+x. The atoms are positioned
sparsely, so the initial distance d(i, j, x, y) between
two atoms at coordinates (i, j) and (x, y) is given
by
p
6.76(x−i)
2
+0.01(x−i)
2
+4(y−j)
2
. We con-
sider this also the desired distance between the two
atoms.
The impulse on an atom in the surface is the
sum of bond forces, collision forces, and a damping
force. The total bond force on an atom at coordinate
(i, j) is
P
16
x=0
P
16
y=0
~
fb(n(i, j), d(i, j, x, y), n(x, y))
for all 0 < d(i, j, x, y) < 2. The collision forces
capture the collision between an atom in the ring
and an atom in the surface. Thus, the total collision
force on an atom at coordinate (i, j) in the surface is
P
19
k=0
~
fc(n(i, j), k), where k refers to atoms in the
ring. The damping force makes the surface to ap-
pear soft. The damping force on an atom at coordi-
nate (i, j) in the surface is
~
fd(n(i, j), 0.04). However,
when the surface is considered totally inelastic, there
is no damping force. Instead, we use a case specific
external force. It is precisely opposite to the current
impulse at each iteration round; thus, preventing the
PREVISUALIZATION IN ROBOTICS: AN ATOMIC APPROACH
115

Figure 3: Visualization of what happens when a ring is dropped on a tilted surface. The top row shows an inelastic ring
rolling on an inelastic surface. The middle row shows an elastic ring rolling on an inelastic surface. The bottom row shows
an inelastic ring falling sideways on an soft surface. The computed iteration rounds are indicated in each image. The initial
configuration, shown in the leftmost image in the top row, is the same for each of the three cases.
atoms in the surface from moving altogether.
Figure 3 visualizes three different variants of the
example, where the ring is dropped on the surface.
The top row shows the case with an inelastic ring and
an inelastic surface. The middle row shows the case
with an elastic ring and an inelastic surface. The bot-
tom row shows the case with an elastic ring and a soft
surface. The initial configuration is the same in each
case, as shown in the leftmost image in the top row.
The dynamics is different in each case; however, in
the first two cases, as the gravity pulls the ring along
the tilted inelastic surface, the dropped ring gains
slowly momentum and starts rolling on the surface.
The rolling is due to emergent friction between the
ring and the surface. Despite the emergent friction,
in the second case, the ring preserves its elasticity, as
shown by the images in the middle row in Figure 3.
In the last case, the dynamics differs considerably
from the first two cases. Then, the soft surface caves
in underneath the ring. This, in turn, causes the ring
to fall sideways.
It is important to notice that, in all three cases,
bouncing, friction, rolling, and falling are emergent
dynamics. We do not explicitly specify them in the
model; yet, the visualization clearly displays all these
dynamics.
Again, the model is computationally light; and can
be computed and rendered in real-time. For instance,
a modest 500MHz PowerPC G3-processor computes
4000 iteration rounds in about 2.7 seconds.
When considering robotics, this examples shows
that the atomic approach supports modelling of com-
ponents with varying rigidness. For instance, we
could model and previsualize what happens to a robot,
when it suddenly has a flat tire.
6 CONCLUSION
In this paper, we discussed use of previsualization in
robotics. In previsualization, a computer animates a
highly underspecified model, to reveal if the model
misses some key components, or if the dynamics is
not as desired.
We investigated in this paper an atomic approach
to previsualization. Its main advantage is that it uses
emergent dynamics to reveal detailed interaction dy-
namics from a model. Thus, in the model, we only
ICINCO 2004 - ROBOTICS AND AUTOMATION
116

need to specify the shape of the interacting compo-
nents using atoms, and determine which of the atoms
may collide with each other. In the atomic approach,
this information is enough for computing the interac-
tion dynamics between the components.
The interaction dynamics revealed by emergent dy-
namics is rich in realistic details. We illustrated how
effortlessly the emergent dynamics captures vibra-
tion, entanglement, bouncing, caving in, friction, and
rotation. All of these dynamics are usually considered
too laborious when modelling free-form objects.
The atomic approach supports experimentation. In
a model, we can replace one component with another
without having to consider the changes in the interac-
tion dynamics. The interaction dynamics is emergent.
Also, we can easily attach software components, such
as neural nets, to the model. They can be used, for
instance, for controlling the dynamics on the physical
components. This is done by inflicting desired forces
on some specific atoms in the physical components.
Another advantage of the atomic approach is that
the forces on the atoms are captured by simple and
compositional mathematical formulae. Consequently,
models become computationally light, and they can
be computed and rendered in real-time. An object-
oriented implementation of the atomic approach can
be found, for instance, in (R
¨
onkk
¨
o, 2003a).
Clearly, the use of the atomic approach is not limit
to previsualization of solid objects in robotics. It can
also be applied to other fields, such as study of fluid
dynamics. Then, fluid as material is modelled as a
collection of individual atoms. The denseness of the
fluid depends on the number of atoms, whereas the
stiffness of the fluid depends on the damping forces on
the atoms. The granularity of the fluid is controlled
by introducing pairs, or triples, of atoms with bond
forces in to the fluid.
The atomic approach is our first attempt to harness
emergent dynamics to help design and development
in robotics. In our future studies, we wish to find
out how far we can push this technology. In partic-
ular, our near future goal is to polish the approach so
that it is easily applicable by scientists and researchers
studying complex interaction dynamics.
REFERENCES
Adams, R. A. (1999). Calculus: A Complete Course.
Addison-Wesley, Don Mills, 4th edition.
Arkin, R. C. (1998). Behavior-Based Robotics. MIT Press,
Cambridge.
Ferster, B. (1998). Idea editing: Previsualization for feature
films. POST Magazine.
Mosterman, P. (1999). An overview of hybrid simulation
phenomena and their support by simulation packages.
In Vaandrager, F. W. and van Schuppen, J. H., ed-
itors, Proceedings of Hybrid Systems: Computation
and Control, number 1569 in LNCS, pages 165–177.
Springer-Verlag, Berlin.
Odell, J. (1998). Agents and emergence. Distributed Com-
puting.
Reeves, W. T. (1983). Particle systems - a technique for
modeling a class of fuzzy objects. Computer Graph-
ics, 17(3):359–376.
Reynolds, C. W. (1987). Flocks, herds, and schools: A
distributed behavioral model. Computer Graphics,
21(4):25–34.
R
¨
onkk
¨
o, M. (2003a). Colliding threads and rods: An atomic
approach. Online illustrative document, Department
of Computer Science, University of Kuopio.
R
¨
onkk
¨
o, M. (2003b). Previsualization in robotics: An
atomic approach. Technical Report A/2003/4, Depart-
ment of Computer Science, University of Kuopio.
Thornton, S. T. and Marion, J. B. (2004). Classical Dynam-
ics of Particles and Systems. Brooks/Cole – Thomson
Learning, Belmont, 5th edition.
Witkin, A. (1997). Physically based modeling: Principles
and practice. Online Siggraph ’97 Course notes.
Young, H. D. and Freedman, R. A. (2000). University
Physics with Modern Physics. Addison-Wesley, San
Francisco, 10th edition.
Zill, D. G. and Cullen, M. R. (1997). Differential Equations
with Boundary-value problems. Brooks/Cole Publish-
ing Company, Pacific Grove, 4th edition.
PREVISUALIZATION IN ROBOTICS: AN ATOMIC APPROACH
117
