
BEST-ACTION PLANNING FOR REAL-TIME RESPONSE
An approach in ORICA
Tariq Ali Omar, Ana Simonet, Michel Simonet
Osiris Team, TIMC-IMAG Laboratory, La Tronche Cedex, France
Keywords: Real-time control, Artificial Intelligence, Planning.
Abstract: A planner for real-time response aims at building a plan to safely guide the world to its goal state by
guaranteeing response deadlines. Ideally, it should find the paths most suitable for guaranteeing real-time
behaviour and goal achievement. To achieve this ideal behaviour, it must possess maximum information
about the world behaviour and be able to plan the responses of the system under-control to its advantage. It
should be able to reason about one path with respect to the other, based on the execution duration, the
amount of resources used and the system safety. In this paper, we present the ORICA (OSIRIS
1
real-time
intelligent control architecture) real-time response planner, which builds plans that permit the real-time
system to strive to achieve its goal in un-guaranteed environment behaviour, while still ensuring system
safety. It does heuristic reasoning for comparison of different paths when a choice of path is possible.
1 INTRODUCTION
Like most classic AI problems, a real-time AI
system for control application is given the current
world state and it plans actions to lead the world to a
goal state. However, it needs to combine the
properties of predictability and response deadline
guarantee of a real-time system with the intelligent
reasoning. Thus, it must provide the best response
that can satisfy the given response-time deadline and
safely lead the system to its goal.
Different approaches have been used to handle this
problem. Precompiled structures using search-based
reasoning are predictable, but impractical for
complex world problems. Reactive behaviour of
reasoning and selecting a response within the
deadline, like “Anytime” and “design-to-time”
(Garvey, 96) algorithms are useful but compromise
the response precision to respect the response
deadline. Planning systems like PRS (Ingrand, 01)
and CIRCA (Goldman, 00) build plans of responses
that can take the world to the goal state.
Planning systems can permit more organized
response to world events through reasoning over the
future possible world behaviour. The responses can
be selected based on their usefulness under a given
situation.
Ideally, the best response plan for a real-time
control application is the one that can lead the world
to its desired goal state safely by meeting all
response deadlines and minimizes system resource
occupation. Two important factors affecting the
quality of reasoning of a planner are:
1. Knowledge representation semantics for real-
time world behaviour and ease of reasoning about
temporal deadlines and responses.
2. Heuristic measure of different factors to
determine most suitable real-time response paths,
i.e., cost of execution, safety etc.
In this paper, we present the real-time response path-
planner, as implemented in ORICA. The AI
planning module of ORICA is very similar to that of
CIRCA, but supports augmented knowledge
representation semantics, threat perception and
heuristic reasoning for planning the best real-time
response.
In the following sections, we discuss how the
ORICA planner handles the best-action selection
problem through its knowledge representation
semantics, reasoning around threat of failure and
heuristic measurement of the quality of paths that
are lead to by a selected response action.
2 REASONING ABOUT REAL-
TIME WORLD BEHAVIOUR
ORICA uses a states space planner (SSP) which
starts from the initial world state and identifies all
reachable states, i.e., the states that can be reached
through fireable transitions from the current state. A
1
OSIRIS is an implementation of the p-type model
presented by (Simonet,94)
306
Ali Omar T., Simonet A. and Simonet M. (2004).
BEST-ACTION PLANNING FOR REAL-TIME RESPONSE - An approach in ORICA.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 306-309
DOI: 10.5220/0001130803060309
Copyright
c
SciTePress

transition is defined by a set of preconditions and
postconditions. It is said to be applicable from a
state if its preconditions are satisfied by the state.
The planner recursively identifies all reachable
states from each state and plans actions when
possible in order to guide the world towards the goal
state. An applicable transition from a state may lead
to a failure state, e.g., a robot falling off a cliff. To
ensure system safety, the planner guarantees that no
failure transition fires from a state.
ORICA uses the world state space model as
presented below, to define the real-time behaviour of
the world.
2.1 World State Space Representation
World state space is a set of possible world states.
Each state has transitions leading to other states.
If
where S is finite set of world states,
and where T is the set of all possible
world transitions then:
Sss ∈
21
,
21
, ss ≠ Tt ∈
t :s
1
→s
2
and ,
1 2
)( st =∇ )( st =
ℜ
where
and ℜ are the domain and range functions
on a transition. ORICA segregates the transitions
into five categories, as given below:
∇
arttree
tttttT UUUU=
Each transition t has two time intervals min∆(t)
and max∆(t), measured from the instant the world
enters
(t). The former represents the minimum
duration after which t can fire, and the latter the
maximum duration before which t must fire. Their
respective min∆ and max∆ are given as:
∇
where 0 < firing time < ∞, bect(t
a
) and wcet(t
a
)
represent the best-case and the worst-case execution
times of the action transition. The event, temporal
and guaranteed temporal transitions, represent the
environmental events. An event transition may fire
at any instant as the world enters the domain state.
However, it is not guaranteed to fire. A temporal
transition is guaranteed not to fire before a finite
time delay, while a guaranteed temporal transition is
guaranteed to fire between min∆ and max∆ delays.
The guaranteed event and action transitions
represent the agent’s responses. The guaranteed
event guarantees that the system will react at
predefined deadline after the domain state of the
transition is reached. The action guarantees that the
system will respond before a finite time deadline.
Two types of sub-regions are defined in the
world state space, i.e., the safe region and the threat
region. The “safe region” is a set of “safe states”
from which direct failure is impossible. The threat
region consists of the failure states and “threat
states”, states from which failure is possible.
The AI planner may build a plan leading to a
state inside a threat region, in order to achieve the
goal. However, it must ensure that a guaranteed path
will take the world to safe region by pre-empting the
failure transitions in the threat region. This is done
by planning a guaranteed transition, i.e., an action, a
guaranteed event or a guaranteed temporal
transition, which will fire before failure can occur,
i.e.,
max∆(gt(s)) < min∆(ttf (s))
where gt(s) and ttf(s) are respectively guaranteed
and temporal transition to failure from state s.
A guaranteed event is like a watch-dog timer set
when the world reaches its domain state. It enables
the system to modify its beliefs about the world state
when no external event occurs by a finite time.
2.3 Dependent Temporal Transitions
to Failure
All transitions inside a threat region, taking the
world from a threat state to another, consume a finite
amount of time (except for an event transition which
may be instantaneous). Inside the threat region the
world moves towards a failure.
The time to failure from a threat state is
represented as a dependent temporal transition to
failure (dttf) and ORICA states that it depends on the
length of previous transitions in the threat region and
their effect on the cause leading to failure (Omar,
04), e.g., throwing water on fire may reduce its
spread but throwing oil will speed it up.
Transition Symbol min∆ max∆
Event t
e
0 ∞
Guaranteed event t
re
firing time firing time
Temporal t
t
> 0 ∞
Guaranteed
temporal
t
rt
> 0 < ∞
Action t
a
bcet(ta) Sensing
delay+wcet(ta)
If the previous state s
i-1
is more threatening than
the currents state s
i
then the time to failure from the
current state is given as:
=
∆
))((min
i
sdttf
))((max
))((min
))((min
1
1_
−
∆−
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∆
×∆
ia
i
i
st
sttf
X
sttf
Otherwise it is given as:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∆
∆−
×∆=∆
−
))((min
))((max
))((min))((min
1_
1
i
ia
ii
sttf
stX
sttfsdttf
BEST-ACTION PLANNING FOR REAL-TIME RESPONSE - An approach in ORICA
307

Where
⎭
⎬
⎫
⎩
⎨
⎧
≤≤∆
=∆
=
−
niforsdttf
iforsttf
X
i
3))((min
2))((min
1
1
The dependent temporal transition relationship
exists only when the world moves from a threat state
to another threat state, within the same threat region.
3 HEURISTIC ACTION QUALITY
MEASUREMENT
The choice of the best action from a set of actions
possible from a state does not only depend on the
action’s execution length, resource utilization and
safety of the destination state, but also on the paths it
leads to.
Since, the “brute force” approach of tracing all
paths from all possible actions is a costly operation
in resource and time, a heuristic approach of “N-step
look ahead” is used by the ORICA planner. It does
depth-wise path search to the next N states and
calculates “cost of path-section” for each of the
paths based on their safety, execution length and
length of actions employed. Action leading to least
average cost paths is selected.
3.1 Threat Factor
The threat factor for a path section is defined as
“how close the world gets to failure, while moving
along that path”. It is calculated as the sum of the
costs of successive transitions inside the threat
region. The higher the threat factor, the shorter will
be the real-time response deadline, leading to more
load on system resources to detect and react to the
states along that path. It is represented as TF(Pi) for
a path-section Pi and calculated as:
∑
=
∆
=
n
i
i
i
i
sdeadline
t
PTF
1
)(
)(max
)(
where P
i
is a path composed of n successive
threat states and deadline(si) is the shortest time to
failure from the state si.
The TF(P
i
) is a positive value and varies in the
interval [0,1]. The threat factor equal to one
guarantees that the path will lead to failure.
3.2 Length Factor
The length factor for a path section measures “the
maximum time taken to cover that path section”.
The maximum length of all fireable transitions from
a state is less than the max∆ of the first guaranteed
transition in the set or the shortest time to failure
from the state (state deadline).
The length factor LF(P
i
) is thus given as:
)(max*
)(max
)(
max
1
tn
s
PLF
n
i
i
i
∆
∆
=
∑
=
where P
i
is a path section composed of n states,
max∆(s
i
) is the maximum time for which the world
can stay in the state si and t
max
is the maximum finite
length transition in the set of all transitions of
knowledge base.
3.3 Actions Factor
The actions factor is a measure of “length of all
actions along the path section”. It is important as the
real-time execution system must detect the state in
time to take the necessary planned action and meet
the response deadline. Shorter actions factor means
either less actions or actions with less execution
length, limiting the occupation of system resources.
It is given as:
)(
)(
)(
max
1
awcetn
awcet
PAF
n
i
i
i
×
=
∑
=
where n is the number of action states in the
path-section and a
max
is the action with the
maximum worst case execution time in the set of all
actions in the knowledge base.
3.4 Cost of the path-section
The above three factors permit a heuristic measure
of quality of a path section for real-time response.
Their weighed sum gives the cost of a path-section:
[
]
[
][ ]
CBA
PAFCPLFBPTFA
PC
iii
i
++
×+×+×
=
)()()(
)(
where the values of the constants A,B and C are
assigned empirically. ORICA assigns higher priority
to the threat factor to ensure safe real-time behaviour
and hence assigns A twice the value of B and C.
For all possible responses from the current state,
an average cost of all paths originating from it is
calculated and the response with least cost is
selected. However, being heuristic calculation
limited to N states, the selected response does not
guarantee safety and goal achievement over the
complete path. If a path fails, either because it does
not take the system to the goal or it cannot guarantee
safety, then the planner backtracks to a previous
state and selects the second best response from it.
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
308
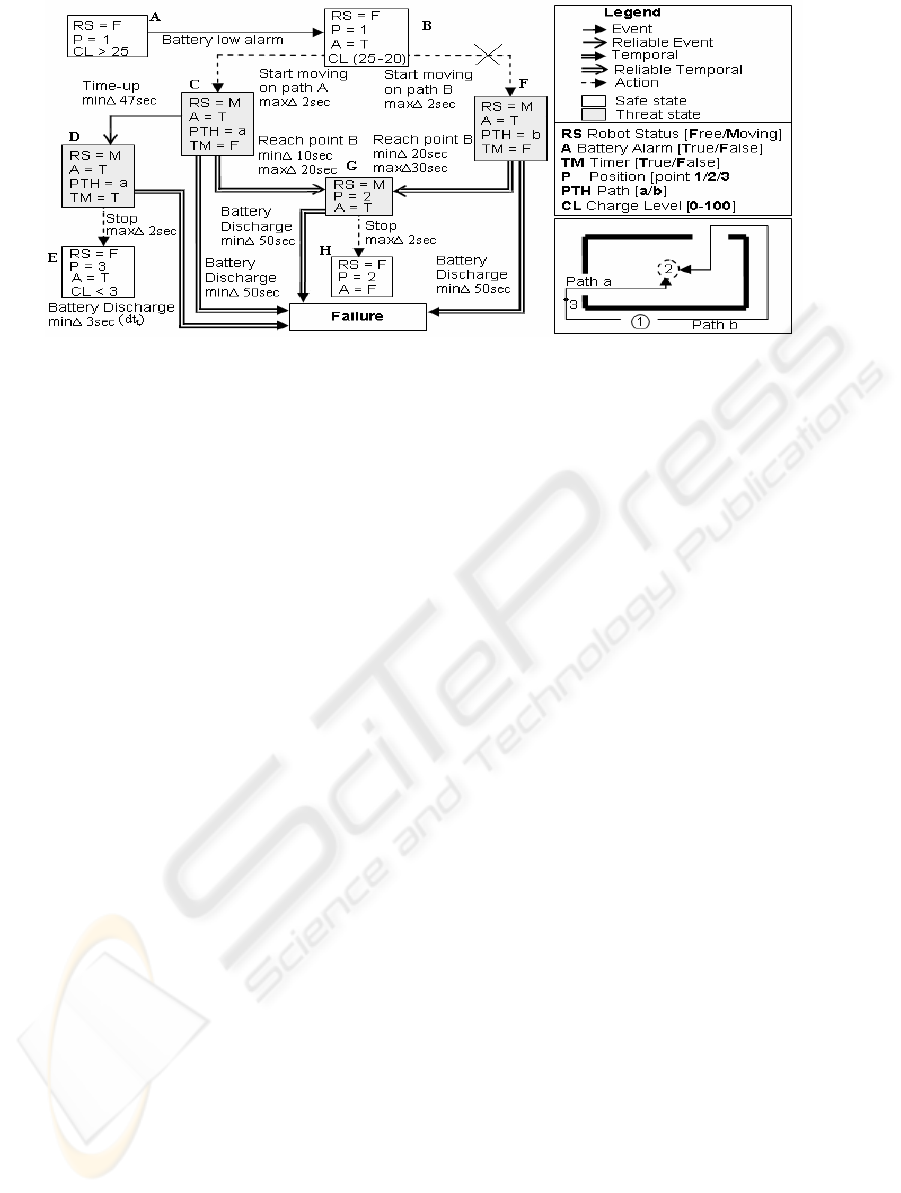
Figure 2: Planning for a robot to move from point 1 to 2.
4 EXAMPLE
To demonstrate the reasoning capability of the
ORICA planner we consider a mobile robot at point
1. It receives a “low battery” event (passage from
state A to state B). It must reach point 2 (see bottom
right box in figure 2) to charge its batteries. The
knowledge about the robot can only guarantee
minimum motion duration before the batteries
discharge completely, based on charge level of the
batteries. However, complete discharge is a failure
condition which it must avoid.
The planner starts building a plan to reach point
2. The reliable temporal transitions from state C and
F guarantee that the robot will reach point 2 before
failure (i.e., 20 sec and 30 sec). The two paths
B,C,G,H and B,F,G,H will have same threat and
action factor but the length factor will be less for the
path B,C,G,H and hence the planner will select it.
If the knowledge base cannot guarantee the
passage of the robot from state C to state G before
the transition to failure occurs (i.e., a temporal
transition exists between state C and state G, instead
of the reliable temporal transition) then the planner
will build a guaranteed event transition from state C
to state D. Since state C and D are in same threat
region, the dependent temporal transition from state
D to failure will have a min∆ equal to 3 seconds (50
- 47). The action transition from D to E is
guaranteed to fire in 2 seconds, thus it will pre-empt
the dependent transition to failure, preserving the
safety of the robot, even though the goal is not
reached.
Thus, although the knowledge base was not able
to guarantee that the robot could reach its goal,
because of imprecise knowledge of the path length
the planner still made it possible for the robot to
strive to reach point 2, while ensuring that the failure
is avoided at all costs.
5 SUMMARY AND FUTURE
WORK
We have presented the ORICA planner for real-time
response planning with its knowledge representation
semantics and heuristic reasoning. The planner can
build plans to permit the agent to strive to reach its
goal without compromising safety, when no
guaranteed path is available. The heuristic analysis
permits a piece-wise comparison of paths based on
factors most useful for real-time response.
Current implementation of ORICA has a Java
based AI module for reasoning and planning while
the real-time module is being built in C and will run
on a QNX platform. Our future objectives include
testing the model in real environment and comparing
our results with the other real-time AI models.
REFERENCES
Ingrand F. Olivier D. Extending Procedural Reasoning
toward Robot Actions Planning, IEEE ICRA 2001,
Seoul, South Korea.
Garvey, A., Lesser, V.. Design-to-time Scheduling and
Anytime Algorithms. In SIGART Bulletin, Volume 7,
Number 3. January, 1996.
Simonet A., Simonet M., Objects with Views and
Constraints : from Databases to Knowledge Bases,
OOIS'94, D. Patel, Y. Sun and S. Patel eds, London,
Springer Verlag, Dec. 1994, pp 182-197.
Goldman R. P., Musliner D. J., and Pelican M. J., Using
Model Checking to Plan Hard Real-Time Controllers,
Proc. AIPS Workshop on Model-Theoretic
Approaches to Planning, April 2000.
Omar T. A., M. Simonet, A. Simonet, Threat Perception in
Planning for Real-Time Response. To be published in
proceedings of CSIMTA, 2004.
BEST-ACTION PLANNING FOR REAL-TIME RESPONSE - An approach in ORICA
309
