
PLAYING WITH ROBOTS AND AVATARS IN MIXED REALITY
SPACES
V. Antunes, R. Wanderley, T. Tavares, P. Alsina, G. Lemos, L. Gonc¸alves
Universidade Federal do Rio Grande do Norte
DCA-CT-UFRN, Campus Universit
´
ario, Lagoa Nova, 59072-970, Natal, RN, Brasil
Keywords:
Robots, Avatars, Visual Positioning, Mixed Reality
Abstract:
We propose a hyperpresence system designed for broad manipulation of robots and avatars in mixed reality
spaces. The idea is to let human users play with robots and avatars through the internet via a mixed reality
system interface. We make a mixing between hardware and software platforms for control of multi-user
agents in a mixed reality environment. We introduce several new issues (or behaviors) as “Remote Control”,
“Augmented Reality” for robots, making robots “Incarnating” avatars and user humans connected through
the Internet. A human user can choose which role he/she wants to play. The proposed system involves
a complex implementation of heterogeneous software and hardware platforms including their integration in
a real-time system working through the Internet. We performed several tests including experiments using
different computer architectures and different operating systems, in order to validate the syustem.
1 INTRODUCTION
According to the Computer-Supported Cooperative
Work (CSCW) aproach, Moran and Anderson (Moran
et. al., 1990) discuss three fundamental ideas: Shared
Workspaces, Coordinated Communication and Infor-
mal Interaction. Shared Spaces can represent CSCW
applications in terms of spatiality, transportation and
artificiality (Milgram, 1994; Benford, 2000). Unlike
usual applications in Virtual Reality it replaces the
physical world. Augmented reality explores seam-
lessly applications or applications that mix virtual and
real features. Ressier (Rssler, 2000) presents an en-
vironment for collaborative engineering. This envi-
ronment integrates a multiuser synthetic environment
with physical robotic devices. The goal is to provide
a physical representation of the 3D environment en-
abling the user to perform direct, tangible manipula-
tions of the devices. The implementation uses robots
constructed with LEGO kits and join VRML and Java
technologies to it. It also uses a vision processing
system for computing orientation and position of the
robots in the real environment. The Augmented Re-
ality (AR) paradigm (Moran et. al., 1990) enhances
physical reality by integrating virtual objects into the
physical world, which becomes, in the visual sense,
an equal part of the natural environment. The Collab-
orative AR Games project is a good example of these
(Moran et. al., 1990). This kind of work has been
designed for demonstrating the use of AR technolo-
gies in a collaborative entertainment application. It is
a multi player game simulation where the users play
with cards. Game goal is to match object that log-
ically belong together, such as an alien and a flying
saucer. When cards containing logical matches were
placed side by side, an animation is triggered involv-
ing the objects on the card.
We propose a system that is more general and
closer to reality than the above ones, possible of ap-
plications in remote working spaces where (real-time)
interaction is a requirement. We use autonomous
robots with proper perception and decision and pro-
vide a way for them to, on-line, interact with people
and objects in the real and virtual world. In certain
cases, the human, through an avatar, would interfere
in the robot autonomous, attentional behavior guiding
its motion, as for example to closer examine an ob-
ject detected in a certain environment place. In other
cases, the robot would guide the human user through
the real environment (as in a museum). Other humans
could enter the environment and also interact with the
robot or other human users, through their avatars. In
this way, robots, avatars and human users can live in
this environment, interacting to each other as neces-
318
Antunes V., Wanderley R., Tavares T., Alsina P., Lemos G. and Gonçalves L. (2004).
PLAYING WITH ROBOTS AND AVATARS IN MIXED REALITY SPACES.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 318-321
DOI: 10.5220/0001133603180321
Copyright
c
SciTePress
sary. The system perception of the world is constantly
updated to reflect the current world status.
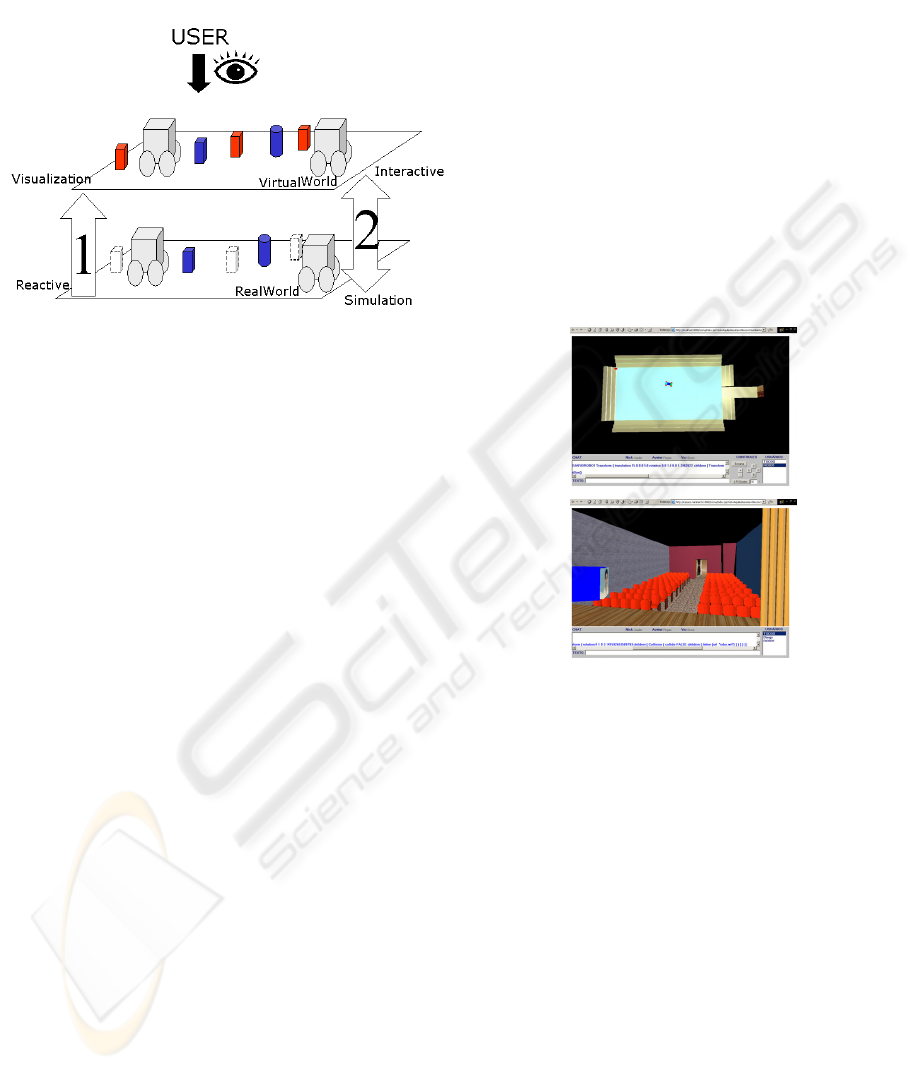
Figure 1: HYPERPRESENCE overview.
2 THE HYPERPRESENCE
SYSTEM
Figure 1 illustrates the conceptual model of the HY-
PERPRESENCE system. It follows the basic idea of
having real and virtual worlds representing the same
situation. In phase 1 (arrow 1 in the left of figure) we
have an unidirectional flow from real to virtual envi-
ronment. The virtual interface is used for visualiza-
tion of reactive or intended actions performed by real
objects or robots. The second step is to promote in-
teraction between these two worlds. Arrow 2 (in the
right) illustrates this phase where we have interactive
options for users that can create and manipulate vir-
tual objects that will be perceived in the real world
and influencing actions of the agents. In this case,
we have a platform for simulating the behavior of the
agents in the real world.
Our robots operate in real environments that could
be any place providing interactions with its virtual
version. We adopted here an arena, a robot soccer
game, and a Museum (Casa da Ribeira) located in Na-
tal city, Brasil. All environments are closed places in
the real world limited by walls in which we can have
real objects as robots and obstacles. The robots are
autonomous vehicles implemented by using the hard-
ware technology developed by LEGO consortium. In
this implementation, the obstacles are colored cubes
or cylinders. We can have more than one robot in the
environment so a robot could be a dynamic obstacle
for another one. With this hardware setup, we can
stimulate many kinds of tasks as: (1) moving around
and avoiding obstacles; (2) looking for special objects
(as colored cubes or cylinders); (3) identifying and
catching special objects, (4) manipulating objects.
For representing the real world and the objects,
we implemented a virtual version of the above real
environments using VRML (see Figure 2. The vir-
tual version of Casa da Ribeira includess all gallery
and cultural works being exposited. The resulting
model is put in an Internet site where virtual users
can visit, look around, and interact with the matte-
rial (evaluating and sending comments). Each real
object is represented in the 3D interface by using a
corresponding avatar. Communication between the
real and any (restricted) number of virtual versions is
provided through an Internet connection. So avoiding
sending images and other massive information is one
of the key restrictions we must pay attention.
Figure 2: Virtual versions of: Robot soccer and arena (top),
Casa da Ribeira cultural space (middle) , and its Theater
(bottom).
2.1 The architectural model
Figure 3 illustrates the design of the Hyperpresence
system, relating the main architectural components
and connectors. Briefly, the 3D Interface Compo-
nent represents the 3D virtual interface and the 3D
objects. The major function of the 3D Interface com-
ponent is the real-time visualization of events in the
real environment. The VRML Multi-User Client is
the observer of events for the 3D Interface. For each
event generated for an avatar in the virtual environ-
ment the VRML Multi-User Client sends a message
to the VRML Multi-User Server component, which
controls the VRML MultiUser Client components.
For each real object (robot or obtacles) it provides
its geometric 3D representation - an avatar. Each
avatar is treated by the VRML Multi-User Server as
PLAYING WITH ROBOTS AND AVATARS IN MIXED REALITY SPACES
319

a client connected in this server. The VRML Multi-
User Server feeds each client with the corresponding
information (position and orientation) from the Visual
Server and Hardware Server components, so it can
keep the syncronization between both environments.
Also, if a virtual avatar representing an user enters
the scene its position and orientation is constantly up-
dated. The Hardware Server Component is responsi-
ble for getting and sending information in real-time to
the autonomous real entities, that is, to the robots in
the real world. Although, the robots are implemented
as reactive units the Hardware Server can send mes-
sages to each robot and update their inputs according
to application needs. This component also sends mes-
sages for the VRML Multi-User Server. The func-
tionality of the Visual Server Component is to ac-
quire/determine position and orientation of the real
objects and to send them to the other components.
To do that, the Visual Server component has a video
camera system, and uses image processing and recog-
nition algorithms (discussed later) for mapping colors
marks contained in each object in position and ori-
entation, for each real object. The Real Environment
Component is the physical environment and the real
objects system represented by robots, cubes, cylinder
and walls. Each robot can have its own implemen-
tation code and this depends on the task goal to be
achieved. Also, we can run different tasks for each
robot, for example one robot can move and/or pick up
a can. We note that all of the above components and
connectors must operate in real-time. Some of them
operate in synschronous way, as the visual server, and
some of them in assynchronous way.
Figure 3: System Architecture.
3 EXPERIMENTS,
DEMONSTRATIONS AND
RESULTS
In the first experiment, an user operating a remote
computer, located far away from the robot place runs
the remote control behavior for controlling the robot
through an open internet connection with the robot
hardware. The real and virtual robots could per-
form the same remote controlled motion, following
the same path. In this case, the control was under
a human user command. In the following a point in
the environment (the red ball in the top-left part) is
set for the robot to design a trajectory, and to follow
it in order to reach that point. Both real and virtual
versions of the robot could be seen moving while the
trajectory is traversed in real-time. We did next an
experiment in which the real robot encarnates the vir-
tual one. In this case, the virtual robot is performing a
motion from one point to another, commanded by the
human user (this is different than remote controling,
since a virtual point is given to the virtual version).
The virtual robot performs a motion from one place
to another. The real robot could perform well this
task in the real side. In the next experiment, we sim-
ulate remote visualization in the cultural space Casa
da Ribeira. The aim of Casa da Ribeira is to improve
cultural activities specially using its gallery and the-
ather. In its gallery people can see photos, pictures
or sculptures. The multiuser server allows each user
to note the presence of other virtual users in the same
way as in the real cultural center. With this, virtual
users can even communicate to each other during the
visit.
Figure 4: Real robot performing in the Lab ground.
The multiuser server is used in order to control
robots in the real environment. That is, an au-
tonomous robot can be in the real Casa da Ribeira
room interacting with the real environment and a syn-
ICINCO 2004 - ROBOTICS AND AUTOMATION
320

cronous version for this robot can be in the virtual
side. Figures 4 and 5 show the robots running this ex-
periment. In this case we used the the robot located in
our lab ground as representing the real theater and the
avatar of it in the virtual theather room. We are plan-
ning soon the other side of this experience: using the
robot located in the Casa da Ribeira real theater. Note
that we can use the same infrastructure implemented
on the theather for improving a mixed reality play,
where we can envolve real actors (people) interacting
with virtual actors (robots). This virtual actors can be
any person located in anywhere incarnating a robot
avatar. Other intersting application of this structure
is to improve a real-virtual bridge, im other words, to
improve a communication tool for connecting people
located in different spaces. In that way the robots will
be used as the connection channel.
Figure 5: Virtual robot performing in the theater, in a syn-
chronized way.
4 CONCLUSIONS AND
PERSPECTIVES
We developed and tested several tools for allowing
control of both virtual and real versions of robots and
users connected through internet. The developed tools
allow us to provide interactions with users, robots and
avatars through the WWW in several ways. An exam-
ple of an application devised involving both real and
virtual sides is to have a robot as an avatar in a real
museum for a human connected through the internet
in a virtual museum. In this case, the robot could have
an autonomous behavior (to follow a given museum
route tour), learned through several trials were the
robot takes user preferences. Then, as a human enters
the virtual museum, a robot is allocated to it in the real
version of the museum. The robot starts following the
traced route, according to the user preference. As the
robot approach a picture, the human user may use the
remote control, for example, to examine a given pic-
ture with more detail. Note that several robots could
be present representing several humans. As the num-
ber of robots expires, a new user could be represented
by a virtual avatar (without phisical entities represent-
ing it). In this case, the robots must know that there
is another user (avatar) close to them (augmented re-
ality for the robots). We will shortly run experiments
involving robots performing as actors in the Casa da
Ribeira Theater. Besides the above applications, sev-
eral other involving a mix between real and virtual
parts could take place. As a future application exam-
ple, we plan to use this system in order to transmit,
through the internet robot contests. This will include
robot soccer and other versions of games for robots.
REFERENCES
S. Ellis. What are Virtual Environments? IEEE Comp.
Graphics & Applications, 14(1):17-22, Jan 1994
Moran, T.P. and Anderson, R.J. The Workaday World as
a Paradigm for CSCW Design. In Proceedings of
the Conf. on Computer-Supported Cooperative Work,
CSCW ’90. (Los Angeles, CA), pages 381-393. ACM
Press, New York, 1990.
P. Milgram and F. Kishino. A Taxonomy of Mixed Reality
Visual Display, IEEE Transactions. on Information &
Systems.,Vol. E77-D, No.12, pp.1321-1329, 1994.
S. Ressler, B. Antonishek, Q. Wang, and A. Godil. Integrat-
ing Active Tangible Devices with a Synthetic Environ-
ment for Collaborative Engineering. National Institute
of Standards and Technology. 2000.
Anil K. Jain. Fundamentals of Digital Image Processing.
Prentice Hall, 1 edn, 1989.
K. R. T. Aires. Desenvolvimento de um sistema de vis
˜
ao
global para uma frota de mini-rob
ˆ
os m
´
oveis, Master’s
thesis, Federal University of Rio Grande do Norte,
Natal, RN, Brasil.
Shared Spaces: Transportation, Artificiality, and Spaciality.
Steve Benford, Chris Brown, Gail Reynard and Chris
Greenhalgh. Department of Computer Science, Uni-
versity of Nottingham. NG7 2RD, UK. E-mail: sdb,
ccb, gtr, cmg@cs.nott.ac.uk
BRICOS. BricOS Operating System and Compiler ”C” and
”C++” for RCX. brickos.sourceforge.net.
LNP: LegOS Network Protocol. le-
gos.sourceforge.net/HOWTO/x405.html
PLAYING WITH ROBOTS AND AVATARS IN MIXED REALITY SPACES
321
