
PLATFORM-BASED TELEOPERATION CONTROL OF SYMBIOTIC
HUMAN-ROBOT SYSTEM
Tao Zhang, Vuthichai Ampornaramveth, Md. Hasanuzzaman, Pattara Kiatisevi, Haruki Ueno
Intelligent Systems Research Division, National Institute of Informatics
2-1-2 Hitotsubashi, Chiyoda-Ku, Tokyo 101-8430, Japan
Keywords:
Platform-Based Teleoperation Control, Symbiotic Human-Robot System, SPAK, Robovie, AIBO.
Abstract:
This paper presents a platform-based teleoperation control approach of symbiotic human-robot system. With
frame-based knowledge representation, features of robots, human-robot interface and cooperative operation
of symbiotic human-robot system are defined in the Software Platform of Agents and Knowledge Manage-
ment (SPAK). By means of this software platform, human can communicate with robots using human-robot
interface. Cooperative operation of multiple robots can be implemented by teleoperation control through wire-
less network. In this paper, platform-based teleoperation control of an actual symbiotic human-robot system
comprised of human, humanoid robot (Robovie) and entertainment robot (AIBO) is implemented and the
experimental results demonstrate its effectiveness.
1 INTRODUCTION
With the development of robotic techniques, symbio-
sis of human and robots is proposed for construct-
ing high-intelligent, human-friendly welfare society
(H. Ueno, 2002). In such a symbiotic human-robot
system, human is just a ordinary member be able
to acquire services from robots according to his re-
quests. Robots can understand human intention and
act their behaviors for human. In addition, many types
of robots with various functions in this system can co-
operatively work for a specific task. They are good
servers of human and also friendly partners of human.
Therefore, it is an attractive and promising topic to
construct a symbiotic human-robot system.
However, a symbiotic human-robot system is com-
prised of many different types of robots and should
integrate many kinds of techniques for implement-
ing various complex tasks. In addition, as one of
essential conditions, activity of symbiotic human-
robot system should be conducted under wireless
network. Therefore, many conventional control ap-
proaches only in views of a specific robot are not
fit for symbiotic human-robot system comprised of
many different robots (K.J. Schilling, 1999). In this
research, a platform-based teleoperation control ap-
proach is proposed in order to implement complex
control of symbiotic human-robot system.
In order to implement platform-based teleoperation
control of symbiotic human-robot system, regarding
various features of robots, human-robot interaction
as well as cooperative operation, all of them are de-
fined in the software platform by frame-based knowl-
edge representation. Since the teleoperation control
is completely depended on the definition of symbi-
otic human-robot system in software platform, soft-
ware platform should comprise of many functions.
In our laboratory, a software platform, called Soft-
ware Platform for Agents and Knowledge Manage-
ment (SPAK) (V. Ampornaramveth, 2003), is devel-
oped recently. This is a powerful platform and can
provide great supports to the teleoperation control of
symbiotic human-robot system.
The remainder of this paper is organized as follows.
In section II, a symbiotic human-robot system is de-
fined in SPAK by frame-based knowledge represen-
tation, including features of robots, human-robot in-
terface and cooperative operation. Through wireless
network, symbiotic human-robot system is controlled
according to the definition of cooperative operation in
SPAK in section III. Section IV introduces an actual
symbiotic human-robot system comprised of human,
humanoid robot (Robovie) and entertainment robot
(AIBO) and its experimental results demonstrate the
effectiveness of this method.
312
Zhang T., Ampornaramveth V., Hasanuzzaman M., Kiatisevi P. and Ueno H. (2004).
PLATFORM-BASED TELEOPERATION CONTROL OF SYMBIOTIC HUMAN-ROBOT SYSTEM.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 312-317
DOI: 10.5220/0001133803120317
Copyright
c
SciTePress

2 DEFINITION OF SYMBIOTIC
HUMAN-ROBOT SYSTEM IN
SOFTWARE PLATFORM
In a symbiotic human-robot system there are many
different types of robots. All parts of this system
are connected with a wireless network. With human-
robot interface developed by many kinds of tech-
niques, such as speech recognition, image analysis,
etc., robots can communicate with human and under-
stand human requests. Under the control of SPAK,
robots can act their behaviors themselves or perform
cooperative operation among them.
SPAK is a frame-based knowledge engineering en-
vironment (V. Ampornaramveth, 2003). It provides
a central module, which acts as blackboard, knowl-
edge processing brain, memory, and do the judgment,
task planning and execution. It also provides soft-
ware tools necessary for integration of various exist-
ing modules over a TCP/IP network. The features of
SPAK are ”platform-independent” as existing robots
and software modules often rely on different plat-
forms or operation systems, ”network-aware” as the
modules must interact on a network, supporting ”soft-
ware agent” and being ”user friendly”. SPAK is tar-
geted to be the platform on which a group of coordi-
native robots (or their agents) operate on top of frame
knowledge. As illustrated in Fig.1, SPAK consists of
the following software components:
• GUI Interface: A user-friendly graphical interface
to the internal knowledge manager and the infer-
ence engines. It provides the users direct access to
the frame-based knowledge.
• Knowledge Database and Knowledge Manager:
This is the SPAK core module which maintains
the frame systems as Java class hierarchy, and per-
forms knowledge conversion to/from XML format.
• Inference Engines: Verify and process informa-
tion from external modules which may result in in-
stantiation or destruction of frame instances in the
knowledge manager, and execution of predefined
actions.
• JavaScript Interpreter: Interprets JavaScript code
which is used for defining condition and procedural
slots in a frame. It also provides access to a rich set
of standard Java class libraries that can be used for
customizing SPAK to a specific application.
• Base Class for Software Agent: Provide basic func-
tionality for developing software agents that reside
on networked robots.
• Network Gateway: This is a daemon program al-
lowing networked software agents to access knowl-
edge stored in SPAK. All SPAK network traffics are
processed here.
Figure 1: Structure of SPAK.
In order to implement teleoperation control by
SPAK, the symbiotic human-robot system should be
defined in advance. Its definition is based on the
frame-based knowledge representation. It is well
known that frame representation systems are cur-
rently the primary technology used for large-scale
knowledge representation in Artificial Intelligent (AI)
(D. Koller, 1998). A frame is a data-structure for rep-
resenting a stereotyped situation (M. Minsky, 1974).
Attached to each frame are several kinds of informa-
tion. Collections of related frames are linked together
into frame-systems. The structure of a frame is con-
sisted of several items, such as name, type, A-kind-
of, Descendants, slots, etc. (G. Tairyou, 1998). As
the element of a frame, each slot has the following
elements, such as name, type, values, conditions, etc.
Using frames and their slots, features of various
robots in a symbiotic human-robot system can be de-
fined, which are classified by their types, spatial po-
sition, functions, etc. From these features, we can fa-
miliar with each type of robot and further find out the
robots with identical features. Human-robot interface
is also defined, including frames for speech, recogni-
tion, etc. In addition, the relationship among robots
can be defined. The types of relationship among
robots include synchronization, succession, restric-
tion, etc. As we are defining the coordinative con-
trol of symbiotic human-robot system for perform-
ing a specific task, the knowledge on the relationship
among robots will provide sufficient information and
simplify the plan procedure. Besides, many possible
behaviors are defined, which can be implemented by
robots, such as walking, shaking hands, etc. They
provide great support to the activities of symbiotic
human-robot system.
In SPAK, the frame-based knowledge representa-
tion of a symbiotic human-robot system is imple-
mented by means of XML format, as illustrated by
Table.1. XML is a markup language for documents
PLATFORM-BASED TELEOPERATION CONTROL OF SYMBIOTIC HUMAN-ROBOT SYSTEM
313

containing structured information. With XML format,
frame structure as well as its contents written by slots
can be defined easily. Particularly, the frame system
can be illustrated in the SPAK Graphic User Interface
(GUI). In the frame system, all frames are connected
by use of ISA relations. The ISA relation means that
there has the class and sub-class relation between the
upper frame and the lower frame. The lowest frame is
an instance of the upper frame. Besides, correspond-
ing to XML file, there is an interpreter to translate
XML specification into relative commands.
Table 1: XML format in SPAK
< FRAME >
< NAME >c
< / NAME >
< ISA >c
< / ISA >
< ISINSTANCE >...
< / ISINSTANCE >
< SLOTLIST >
< SLOT >c
< / SLOT >
< SLOT >c
< / SLOT >
c
< / SLOTLIST >
< / FRAME >
The meaning of this format can be explained cor-
responding to the definition of a frame. Between
<FRAME> and < /FRAME> defines a frame.
NAME refers to the frame name. ISA refers to
the item of ”A-kind-of”. ISINSTANCE refers to
the frame type. Between <SLOTLIST> and <
/SLOTLIST> defines slots. Each SLOT gives the
contents of a slot. The symbol ”c” means here should
have some contents. With this XML format, a frame
and its slots can be described in detail. Therefore,
a symbiotic human-robot system defined by framed-
based knowledge representation can be implemented
in SPAK by means of XML format.
3 TELEOPERATION CONTROL
OF SYMBIOTIC HUMAN-
ROBOT SYSTEM
With the definition of symbiotic human-robot system
in SPAK, teleoperation control can be implemented.
There are three important behaviors which should be
conducted in the symbiotic human-robot system by
teleoperation control for most of tasks. The first is to
realize interaction between human and robots in or-
der to get human requests. In SPAK integrates several
techniques for implementing human-robot interface,
such as face detection, image recognition, etc. Con-
cerning face detection, by use of ”eyes” of robot, in-
stalled by cameras, robot can get the image of human
face. With the program of face detection storing in the
center computer of robot, robot can recognize human
by what it looks. Of course, if it is the first time that
robot looks this person, robot can store the enough in-
formation about this person’s face in his database by
its learning program. As robot looks this person’s face
again, he can recognize him at once. Thus it sends the
recognition results to SPAK. This result can trigger
other actions of robots.
Another technique that robot can use for human-
robot interface is by means of speech with human.
Robot will firstly store the information on the speech
of human. As robot hears the similar speech again,
he can recognize this person at once. Regarding
these two techniques, SPAK includes the definition of
human-robot interface. With this interface, many in-
dependent programs for performing various functions
in robots, such as image capture, speaking, etc. can
coordinative work to implement interaction between
robot and human.
The second behavior is to implement cooperative
operation. For cooperative operation, firstly, it needs
to trigger the activity of symbiotic human-robot sys-
tem. The simple way is to give a simple command
to indicate the beginning of the activity. But actually,
there are also many other kinds of ways to trigger ac-
tivity. One of the most important ways is based on
human-robot interaction. Next, the plan of activity of
symbiotic human-robot system is necessary for coop-
erative operation. The plan of activity should obey the
relations of all robots. The synchronization relation
means that several robots can be operated together at
the same time for a specific task. Their control in-
structions are generated referring to a same time axes.
The command in each time sampling period is possi-
ble for any robots. The succession relation means that
one robot should start its action after another robot
finishes its action. The restriction relation means that
as one robot is performing a certain action, another
robot can not be acting any actions at the same time.
The action of one robot will interrupt the action of
another robot. If we obey these three relations, even
a complex task could be undertaken by coordinative
control of symbiotic human-robot system.
In SPAK, the above three relations are imple-
mented by the following patterns. Since features of
robots are defined by frames and in SPAK the infer-
ence engines for doing forward and backward chain-
ing are defined, the relations can be implemented by
inference engines. The feedforward chaining is usu-
ally used when a new fact is added to the knowledge
ICINCO 2004 - ROBOTICS AND AUTOMATION
314
base and we want to generate its consequences, which
may add new other facts, and trigger further infer-
ences. The backward chaining starts with something
we want to prove, find implication facts that would
allow us to conclude it. It is used for finding all an-
swers to a question posed to the knowledge base. For
these three relations, if the required argument is ob-
tained, a new fact will be generated. Corresponding
to this new fact, if there has a synchronization rela-
tion, several robots would perform a same task at the
same time. If there defines an action of a robot trig-
gered by this fact, the succession relation will be then
performed. Similarly, a restriction relation will cause
the robot stopping its actions. When we use backward
chaining, for a task there will have many actions from
various robots if they have cooperative relations.
The third behavior is the control of activity of sym-
biotic human-robot system. Since different robots
have different driving programs, the control of ac-
tivity of symbiotic human-robot system is actually
through the agents defined in SPAK. The agents will
convert the control instructions generated in SPAK to
the robots. Basically, SPAK will send commands di-
rectly to each robot according to its plan of activity of
symbiotic human-robot system. Regarding the con-
trol of symbiotic human-robot system, feedforward
control to robots is not enough to perform the task.
Signal feedback from robots is definitely necessary to
evaluate the activity of robots as well as instruct the
next actions of robots. There are two ways to get the
feedback signals on the activity of symbiotic human-
robot system. In the environment where human and
robots are staying, we setup several cameras as the
sensors to capture the status of robots. Based on the
human’s judgment on the actions of robots, SPAK can
adjust its control signals or generate new tasks. An-
other way to get the feedback signals is by the robots
themselves. As robots finished one of their actions,
they should send back a response corresponding to
their actions. Moreover, since there are many sen-
sors in robot bodies, they could also send some sig-
nals detected by these sensors to SPAK, which could
be helpful for SPAK to know the status of the activity
of symbiotic human-robot system.
Finally, the teleoperation control of symbiotic
human-robot system is carried out as the following
process. In this system, all components are staying
at the state of connection at any time. The actua-
tion of behaviors of this system is from the beginning
of human-robot interaction. As robot gets human re-
quests through the interaction, it will send relative in-
formation to SPAK. Then, SPAK will plan the action
of symbiotic human-robot system according to human
request and generate instruction to robots. Robots
will offer responses to human. These robots will con-
duct relative behaviors independently or through co-
operative operations for human controlled by SPAK.
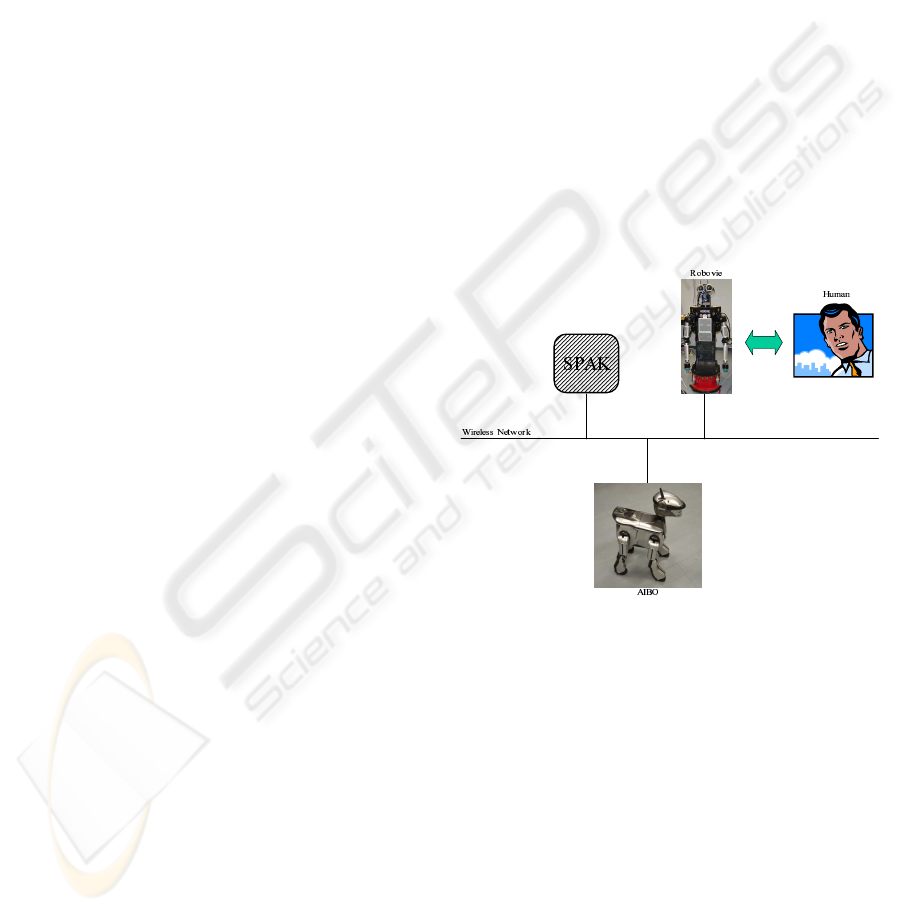
4 EXPERIMENT
An actual symbiotic human-robot system is con-
structed, which is comprised of human, humanoid
robot (Robovie), entertainment robot (AIBO), etc., as
illustrated by Fig.2. Robovie is developed by Ad-
vanced Telecommunications Research Institute Inter-
national (ATR) of Japan. It is a kind of autonomous
communication robots that can communicate and in-
teract with human in our daily environment. It has
11 degrees of freedom and sensors such as an omni-
directional camera, pan-tilt zooming cameras, micro-
phone, ultrasonic range sensors, tactile sensors, etc. It
also can move by its wheels. Robovie also provides
many demo programs for speech, camera vision, mo-
tion, etc. Based on the functions of Robovie, we have
developed several programs for monitoring the sta-
tus of all sensors and sending them to SPAK, defin-
ing many actions of Robovie as well as instructing
Robovie to talk with human. Robovie can be used in
the field of education, nursing, medical treatment, etc.
Figure 2: An actual symbiotic human-robot system.
AIBO is a kind of entertainment robots and devel-
oped by Sony Co. of Japan. It can provide high de-
gree of autonomous behavior and functionality. In our
experimental system, we use AIBO ESP-220, which
is able to walk on four legs. It has a total of 16 ac-
tuators throughout its body to control its movements,
and 19 lights on its head, tail, and elsewhere to ex-
press emotions like happiness or anger and reactions
to its environment.
As shown in Fig.3, a frame hierarchy written by
XML format is defined in SPAK. All frames are con-
nected by their ISA relations. For ”Robot” frame,
there includes ”Robovie” and ”AIBO”. Related with
Robovie, there are many frames about Robovie’s
components (”Mouth”, ”Motor”, etc), Robovie’s
sensors and Robovie’s behaviors (”FaceDetection”,
PLATFORM-BASED TELEOPERATION CONTROL OF SYMBIOTIC HUMAN-ROBOT SYSTEM
315

Figure 3: Frame hierarchy of symbiotic human-robot system.
”Greet”, etc.). The Robovie’s behaviors can be
used for human-robot interface. For AIBO, there
are many frames on its actions. Some of them are
AIBO’s atomic actions (”AIBOStand”, ”AIBOSit”,
etc.). Others of them are about AIBO’s behav-
iors comprised of several atomic actions. Con-
cerning the users, there includes frames about new
users (”NewUser”) and known users (”KnownUser”).
Since many frames for symbiotic human-robot sys-
tem have been defined, if relative conditions defined
in the frame are satisfied, this frame will be actuated
and commands given in this frame will be performed.
Fig.4 is the slot-editing table showing slots belonging
to a frame of AIBO. In this frame, we can know that
if three arguments are given by relative frames, the
command defined in the slot ”onInstantiate” will be
performed. With this system, coordinative control of
symbiotic human-robot system is performed by tele-
operation operation through SPAK.
The process of cooperative operation can be de-
scribed as below.
• With the human-robot interface installed in
Robovie, Robovie can recognize human and send
information about human to SPAK, such as user’s
name;
• With the results of human-robot interaction, SPAK
instructs Robovie and AIBO to start activity;
• As defined beforehand on the activity of symbi-
otic human-robot system, Robovie informs human
about AIBO actions firstly;
• AIBO moves.
• As SPAK gets the response from AIBO that indi-
cates the end of AIBO movement, SPAK will in-
struct next action for both Robovie and AIBO.
Fig.5 shows the experimental environment. The ex-
perimental scenario is given in the next page. As do-
ing this experiment, all instructions are generated by
SPAK and sent to each robot. After each action, each
robot should inform its status to SPAK. According to
the status, SPAK will send the next command to each
robot according to the designed plan. With the control
of SPAK, the whole system performs the task condi-
tionally and automatically.
ICINCO 2004 - ROBOTICS AND AUTOMATION
316

Figure 4: Slot-editing table showing slots belonging to a frame of AIBO.
Figure 5: Experimental environment by use of symbiotic
human-robot system.
Robovie: (Robovie looks at the person’s face
and try to recognize it.)
Robovie: Hi, how are you! I have never seen
you before. What is your name?
(Robovie shakes it hand a little bit.)
Human: (A person types his name XXX into
the computer of Robovie.)
Robovie: Hi, XXX. How are you going today?
AIBO will play with you.
(Robovie shakes its both hands with
person while it is speaking with the
person.)
Robovie: AIBO is standing up now.
AINO: (AIBO stands up and sends back the
response to SPAK after its
movement.)
Robovie: AIBO is walking up now.
AINO: (AIBO walks a little bit and sends
back the response to SPAK after its
movement.)
Robovie: AIBO is turning to the left with 90
degree now.
AINO: (AIBO turns to the left with 90
degree and sends back the response to
SPAK after its movement.)
...
5 CONCLUSIONS
A new platform-based teleoperation control approach
of a symbiotic human-robot system is proposed. In
this method, features of various robots, human-robot
interface and cooperative operation can be defined
by frame-based knowledge representation and imple-
mented in SPAK by XML format. By use of this
method, an actual symbiotic human-robot system was
constructed and its experimental results demonstrate
the effectiveness of this method. In the further re-
search, we will apply this system for performing more
complex tasks, especially using it for welfare enter-
prise, such as assisting the elder living at home. Since
this symbiotic human-robot system is open to any
kinds of robots as well as human-robot interfaces, it
can be extended widely for many kinds of applica-
tions.
REFERENCES
D. Koller, A. P. (1998). Probabilistic frame-based systems.
In Proc. of the 15th National Conference on AI, pages
580–587.
Minsky, M. (1974). A framework for representing knowl-
edge. MIT-AI Laboraroty Memo 306.
Tairyou, G. (1998). Development of frame-based knowl-
edge engineering environment. Master’s thesis, Tokyo
Denki University.
Schilling, K. J. and Roth, H. (1999). Control interfaces for
teleoperated mobile robots. Proceedings of 7th IEEE
International Conference on Emerging Technologies
and Factory Automation, 18-21.
Ueno, H. (2002). A knowledge-based information mod-
eling for autonomous humanoid service robot. IE-
ICE Transactions on Information and systems, E85-
D(4):657–665.
V. Ampornaramveth, P. Kiatisevi, H. U. (2003). Toward
a software platform for knowledge management in
human-robot environment. Technical Report of IE-
ICE, 103(83):15–20.
PLATFORM-BASED TELEOPERATION CONTROL OF SYMBIOTIC HUMAN-ROBOT SYSTEM
317
