
AN EVOLUTIONARY APPROACH TO NONLINEAR
DISCRETE-TIME OPTIMAL CONTROL WITH
TERMINAL CONSTRAINTS
Yechiel Crispin
Department of Aerospace Engineering
Embry-Riddle University
Daytona Beach, FL 32114
Keywords: Optimal Control, Genetic Algorithms
Abstract: The nonlinear discrete-time optimal control problem with terminal constraints is treated using a new evolutionary
approach which combines a genetic search for finding the control sequence with a solution of the initial value
problem for the state variables. The main advantage of the method is that it does not require to obtain the
solution of the adjoint problem which usually leads to a two-point boundary value problem combined with an
optimality condition for finding the control sequence. The method is verified by solving the problem of discrete
velocity direction programming with the effects of gravity and thrust and a terminal constraint on the final
vertical position. The solution compared favorably with the results of gradient methods.
1 INTRODUCTION
A continuous-time optimal control problem consists
of finding the time histories of the controls and the
state variables such as to maximize (or minimize) an
integral performance index over a finite period of
time, subject to dynamical constraints in the form of
a system of ordinary differential equations (Bryson,
1975). In a discrete-time optimal control problem,
the time period is divided into a finite number of
time intervals of equal time duration . The?X
controls are kept constant over each time interval.
This results in a considerable simplification of the
continuous time problem, since the ordinary
differential equations can be reduced to difference
equations and the integral performance index can be
reduced to a finite sum over the discrete time
counter (Bryson, 1999). In some problems,
additional constraints may be prescribed on the final
states of the system. In this paper, we concentrate on
the discrete-time optimal control problem with
terminal constraints.Modern methods for solving the
optimal control problem are extensions of the
classical methods of the calculus of variations (Fox,
1950).
These methods are known as indirect methods and
are based on the maximum principle of Pontryagin,
which is astatement of the first order necessary
conditions for optimality, and results in a two-point
boundary value problem (TPBVP) for the state and
adjoint variables (Pontryagin, 1962). It has been
known, however, that the TPBVP is much more
difficult to solve than the initial value problem
(IVP). As a consequence, a second class of solutions,
known as the direct method has evolved.
For example, attempts have been made to recast the
original dynamic problem as a static optimization
problem, also known as a nonlinear programming
(NLP) problem.
This can be achieved by parameterisation of the
state variables or the controls, or both. In this way,
the original dynamical differential equations or
difference equations are reduced to algebraic
equality constraints. The problems with this
approach is that it might result in a large scale NLP
problem which has stability and convergence
problems and might require excessive computing
time. Also, the parameterisation might introduce
spurious local minima which are not present in the
original problem.
49
Crispin Y. (2004).
AN EVOLUTIONARY APPROACH TO NONLINEAR DISCRETE-TIME OPTIMAL CONTROL WITH TERMINAL CONSTRAINTS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 49-57
DOI: 10.5220/0001134700490057
Copyright
c
SciTePress

Several gradient based methods have been
proposed for solving the discrete-time optimal
control problem (Mayne, 1966). For example,
Murray and Yakowitz (Murray, 1984) and
(Yakowitz, 1984) developed a differential dynamic
programming and Newton's method for the solution
of discrete optimal control problems, see also the
book of Jacobson and Mayne (Jacobson, 1970),
(Ohno, 1978), (Pantoja, 1988) and (Dunn, 1989).
Similar methods have been further developed by
Liao and Shoemaker (Liao, 1991). Another method,
the trust region method, was proposed by Coleman
and Liao (Coleman, 1995) for the solution of
unconstrained discrete-time optimal control
problems. Although confined to the unconstrained
problem, this method works for large scale
minimization and is capable of handling the so
called hard case problem.
Each method, whether direct or indirect,
gradient-based or direct search based, has its own
advantages and disadvantages. However, with the
advent of computing power and the progress made
in methods that are based on optimization analogies
from nature, it became possible to achieve a remedy
to some of the above mentioned disadvantages
through the use of global methods of optimization.
These include stochastic methods, such as simulated
annealing (Laarhoven, 1989), (Kirkpatrick, 1983)
and evolutionary computation methods (Fogel,
1998), (Schwefel, 1995) such as genetic algorithms
(GA) (Michalewicz, 1992a), see also (Michalewicz,
1992b) for an interesting treatment of the linear
discrete-time problem.
Genetic algorithms provide a powerful
mechanism towards a global search for the
optimum, but in many cases, the convergence is very
slow. However, as will be shown in this paper, if the
GA is supplemented by problem specific heuristics,
the convergence can be accelerated significantly. It
is well known that GAs are based on a guided
random search through the genetic operators and
evolution by artificial selection. This process is
inherently very slow, because the search space is
very large and evolution progresses step by step,
exploring many regions with solutions of low
fitness. What is proposed here, is to guide the search
further, by incorporating qualitative knowledge
about potential good solutions. In many problems,
this might involve simple heuristics, which when
combined with the genetic search, provide a
powerful tool for finding the optimum very quickly.
The purpose of the present work, then, is to
incorporate problem specific heuristic arguments,
which when combined with a modified hybrid GA,
can solve the discrete-time optimal control problem
very easily. There are significant advantages to this
approach. First, the need to solve the two-point
boundary value problem (TPBVP) is completely
avoided. Instead, only initial value problems (IVP)
are solved. Second, after finding an optimal
solution, we verify that it approximately satisfies the
first-order necessary conditions for a stationary
solution, so the mathematical soundness of the
traditional necessary conditions is retained.
Furthermore, after obtaining a solution by direct
genetic search, the static and dynamic Lagrange
multipliers (the adjoint variables) can be computed
and compared with the results from a gradient
method. All this is achieved without directly solving
the TPBVP. There is a price to be paid, however,
since, in the process, we are solving many initial
value problems (IVPs). This might present a
challenge in advanced difficult problems, where the
dynamics are described by a higher order system of
ordinary differential equations, or when the
equations are difficult to integrate over the required
time interval and special methods are required. On
the other hand, if the system is described by
discrete-time difference equations that are relatively
well behaved and easy to iterate, the need to solve
the initial value problem many times does not
represent a serious problem. For instance, the
example problem presented here , the discrete
velocity programming problem (DVDP) with the
combined effects of gravity, thrust and drag,
together with a terminal constraint (Bryson, 1999),
runs on a 1.6 GHz pentium 4 processor in less than
a minute of CPU time.
In the next section, a mathematical formulation
of the optimal control problem is given. The
evolutionary approach to the solution is then
described. In order to illustrate the method, a
specific example, the discrete velocity direction
programming (DVDP) is solved and results are
presented and compared with the results of an
indirect gradient method developed by Bryson
(Bryson, 1999).
2 OPTIMAL CONTROL OF
NONLINEAR DISCRETE TIME
DYNAMICAL SYSTEMS
In this section, we describe a formulation of the
nonlinear discrete-time optimal control problem
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
50

subject to terminal constraints. Consider the
nonlinear discrete-time dynamical system described
by a system of difference equations with initial
conditions
(1) B0B?Ð3 "Ñ œ Ò Ð3Ñß Ð3Ñß 3Ó
(2) BBÐ!Ñ œ
!
where is the vector of state variables,B − ‘
8
? −ß:8‘
:
is the vector of control variables and
3−Ò!ßR"Ó is a discrete time counter. The
function is a nonlinear function of the state0
vector, the control vector and the discrete time ,3
i.e., x x . Define a performance0 ÀÈ‘‘‘‘
8: 8
index
(3)
N Ò Ð3Ñß Ð3Ñß 3ß R Ó œ Ò ÐR ÑÓ PÒ Ð3Ñß ÐB? B B?9
3œ!
R"
3Ñß 3Ó
where
9‘ ‘ ‘ ‘ ‘ ‘ÀÈ PÀ È
88:
, x x
Here is the Lagrangian function and is aP Ò ÐRÑÓ9 B
function of the terminal value of the state vector
BÐRÑ. Terminal constraints in the form of
additional functions of the state variables are<
prescribed as
(4) <<Ò ÐRÑÓœ! À È 5Ÿ8B ‘‘
85
The optimal control problem consists of finding the
control sequence such as to maximize (or?Ð3Ñ
minimize) the performance index defined by (3),
subject to the dynamical equations (1) with initial
conditions (2) and terminal constraints (4). This is
known as the Bolza problem in the calculus of
variations (Bolza, 1904).
In an alternative formulation, due to Mayer, the
state vector ( ) is augmented by anB ß 4 − "ß 8
4
additional variable which satisfies theB
8"
following initial value problem:
(5) B Ð3 "Ñ œ B Ð3Ñ PÒ Ð3Ñß Ð3Ñß 3Ó
8" 8"
B?
(6) BÐ!Ñœ!
8"
The performance index can then be written as
(7)
N ÐR Ñ œ Ò ÐR ÑÓ B ÐR Ñ ´ Ò ÐR ÑÓ99BB
8"
+ +
where is the augmented stateBB
+
œÒ B Ó
8"
X
vector and the augmented performance function.9
+
In this paper, the Meyer formulation is used.
Define an augmented performance index with
adjoint constraints and adjoint dynamical<
constraints ( ) , with0B ? BÐ3Ñß Ð3Ñß 3 Ð3 "Ñ œ !
static and dynamical Lagrange multipliers and ,/-
respectively.
(8) N œ Ð!ÑÒ Ð!ÑÓ
+
XX
9 /< - BB
!
Ð3 "ÑÖ Ò Ð3Ñß Ð3Ñß 3Ó Ð3 "Ñ×
3œ!
R"
X
- 0B ? B
Define the Hamiltonian function as
(9) LÐ3Ñ œ Ð3 "Ñ Ò Ð3Ñß Ð3Ñß 3Ó-
X
0B ?
Rewriting the augmented performance index in
terms of the Hamiltonian, we get
(10)
N œ ÐRÑ ÐR Ñ Ð!Ñ
+
XX X
9 /< - -BB
!
ÒLÐ3Ñ Ð3Ñ Ð3ÑÓ
3œ!
R"
X
- B
A first order necessary condition for to reach aN
+
stationary solution is given by the discrete version of
the Euler-Lagrange equations
(11)
--
XX
Ð3Ñ œ L Ð3Ñ œ Ð3 "Ñ Ò Ð3Ñß Ð3Ñß 3Ó
BB
0B ?
with final conditions
(12) -/<
XX
B
ÐR Ñ œ 9
B
and the control sequence satisfies the?Ð3Ñ
optimality condition:
(13) L Ð3Ñ œ Ð3 "Ñ Ò Ð3Ñß Ð3Ñß 3Ó œ !
??
-
X
0B ?
Define an augmented function asF
(14) F9œ/<
X
AN EVOLUTIONARY APPROACH TO NONLINEAR DISCRETE - TIME OPTIMAL CONTROL WITH TERMINAL
CONSTRAINTS
51

Then, the adjoint equations for the dynamical
multipliers aregiven by
(15)
--
XX
Ð3Ñ œ L Ð3Ñ œ Ð3 "Ñ Ò Ð3Ñß Ð3Ñß 3Ó
BB
0B ?
and the final conditions can be written in terms of
the augmented function F
(16) -/<
XX
ÐR Ñ œ œ F9
BB B
If the indirect approach to optimal control is used,
the state equations (1) with initial conditions (2)
need to be solved together with the adjoint equations
(15) and the final conditions (16), where the control
sequence is to be determined from the?Ð3Ñ
optimality condition (13). This represents a coupled
system of nonlinear difference equations with part of
the boundary conditions specified at the initial time
3œ! and the rest of the boundary conditions
specified at the final time . This is a nonlinear3œR
two-point boundary value problem (TPBVP) in
difference equations. Except for special simplified
cases, it is usually very difficult to obtain solutions
for such nonlinear TPBVPs. Therefore, many
numerical methods have been developed to tackle
this problem, see the introduction for several
references.
In the proposed approach, the optimality
condition (13) and the adjoint equations (15)
together with their final conditions (16) are not used
in order to obtain the optimum solution. Instead, the
optimal values of the control sequence are?Ð3Ñ
found by genetic search starting with an initial
population of solutions with values of randomly?Ð3Ñ
distributed within a given domain. During the
search, approximate, less than optimal values of the
solutions are available for each generation.?Ð3Ñ
With these approximate values known, the state
equations (1) together with their initial conditions
(2) are very easy to solve, by a straightforward
iteration of the difference equations from to3œ!
3œR". At the end of this iterative process, the
final values are obtained, and the fitnessBÐRÑ
function can be determined. The search than seeks
to maximize the fitness function such as to fulfillJ
the goal of the evolution, which is to maximize
NÐRÑ, as given by the following Eq.(17), subject to
the terminal constraints , as defined<Ò ÐRÑÓœ!B
by Eq.(18).
(17) maximize N ÐR Ñ œ Ò ÐR ÑÓ9 B
subject to the dynamical equality constraints, Eqs.
(1-2) and to the terminal constraints (4), which are
repeated here for convenience as Eq.(18)
(18) <<Ò ÐRÑÓœ! À È 5Ÿ8B ‘‘
85
Since we are using a direct search method, condition
(18) can also be stated as a search for a maximum,
namely we can set a goal which is equivalent to (18)
in the form
(19) maximize N ÐRÑ œ Ò ÐRÑÓ Ò ÐRÑÓ
"
<<
T
BB
The fitness function can now be defined byJ
(20) J ÐR Ñ œ N ÐR Ñ Ð" ÑN ÐR Ñ œαα
"
œ Ò ÐR ÑÓ Ð" Ñ Ò ÐRÑÓ Ò ÐR ÑÓα9 αBBB ,<<
T
with and determined from theα − Ò!ß "Ó ÐRÑB
following dynamical equality constraints:
(21) ,B0B?Ð3 "Ñ œ Ò Ð3Ñß Ð3Ñß 3Ó
3−Ò!ßR"Ó
(22) BBÐ!Ñ œ
!
3 DISCRETE VELOCITY
DIRECTION PROGRAMMING
FOR MAXIMUM RANGE WITH
GRAVITY AND THRUST
In this section, the above formulation is applied to a
specific example, namely, the problem of finding the
trajectory of a point mass subjected to gravity and
thrust and a terminal constraint such as to achieve
maximum horizontal distance, with the direction of
the velocity used to control the motion. This
problem has its roots in the calculus of variations
and is related to the classical Brachistochrone
problem, in which the shape of a wire is sought
along which a bead slides without friction, under the
action of gravity alone, from an initial point ÐB ß C Ñ
!!
to a final point in minimum time . TheÐB ß C Ñ >
00 0
dual problem to the Brachistochrone problem
consists of finding the shape of the wire such as the
bead will reach a maximum horizontal distance B
0
in a prescribed time . Here, we treat the dual>
0
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
52

problem with the added effects of thrust and a
terminal constraint where the final vertical position
C
0
is prescribed. The more difficult problem, where
the body is moving in a viscous fluid and the effect
of drag is taken into account was also solved, but
due to lack of space, the results will be presented
elsewhere. The reader interested in these problems
can find an extensive discussion in Bryson's book
(Bryson,1999).
Let point O be the origin of a cartesian system of
coordinates in which is pointing to the right and BC
is pointing down. A constant thrust force isJ
acting along the path on a particle of mass which7
moves in a medium without friction. A constant
gravity field with acceleration is acting downward1
in the positive direction. The thrust acts in theC
direction of the velocity vector and its magnitudeZ
is , i.e. times the weight . TheJœ+71 + 71
velocity vector acts at an angle with respect toZ #
the positive direction of . The angle , whichB #
serves as the control variable, is positive when Z
points downward from the horizontal. The problem
is to find the control sequence to maximize the#Ð>Ñ
horizontal range in a given time , provided theB>
00
particle ends at the vertical location . In otherC
0
words, the velocity direction is to be#Ð>Ñ
programmed such as to achieve maximum range
and fulfill the terminal constraint . The equationsC
0
of motion are
(23) .Z Î.> œ 1Ð+ =38 Ð>ÑÑ#
(24) .BÎ.> œ Z -9= Ð>Ñ#
(25) .CÎ.> œ Z =38 Ð>Ñ#
with initial conditions
(26) , Z Ð!Ñ œ ! BÐ!Ñ œ !ß CÐ!Ñ œ !
and final constraint
(27) .CÐ> Ñ œ C
00
We would like to formulate a discrete time version
of this problem. The trajectory is divided into a
finite number of straight line segments of fixedR
time duration , along which the?Xœ>ÎR
0
direction is constant. We can increase such as# R
to approach the solution of the continuous trajectory.
The velocity is increasing under the influence ofZ
a constant thrust and gravity . The problem+1 1=38#
is to determine the control sequence at points #Ð3Ñ 3
along the trajectory, where , such as to3−Ò!ßR"Ó
maximize at time , arriving at the same time at aB>
0
prescribed elevation . The time at the end of eachC
0
segment is given by , so can be viewed>Ð3Ñ œ 3 X 3?
as a time step counter at point . Integrating the3
first equation of motion, Eq.(17) from a time
>Ð3Ñ œ 3 X >Ð3 "Ñ œ Ð3 "Ñ X?? to , we get
(28) ZÐ3"ÑœZÐ3Ñ1Ò+=38 Ð3ÑÓ X#?
Integrating the velocity over a time interval ,ZX?
we obtain the length of the segment ?.Ð3Ñ
connecting the points and .33"
(29)
?? #?.Ð3Ñ œ Z Ð3Ñ X 1Ò+ =38 Ð3ÑÓÐ X Ñ
"
#
#
Once is determined, it is easy to obtain the?.Ð3Ñ
coordinates and asBC
(30) BÐ3 "Ñ œ BÐ3Ñ .Ð3Ñ-9= Ð3Ñ œ?#
œ BÐ3Ñ Z Ð3Ñ-9= Ð3Ñ X #?
1Ò+ =38 Ð3ÑÓ-9= Ð3ÑÐ X Ñ
"
#
#
##?
(31) CÐ3 "Ñ œ CÐ3Ñ .Ð3Ñ=38 Ð3Ñ œ?#
œ CÐ3Ñ Z Ð3Ñ=38 Ð3Ñ X #?
1Ò+ =38 Ð3ÑÓ=38 Ð3ÑÐ X Ñ
"
#
#
##?
We now develop the equations in nondimensional
form. Introduce the following nondimensional
variables denoted by primes:
(32) , , ,>œ>> Zœ1>Z Bœ1>B
0
ww#w
0
0
Cœ1> C
0
#w
Since , the nondimensional time is>Ð3Ñ œ 3> ÎR
0
>Ð3Ñœ3ÎR
w
. The time interval was defined as
??Xœ>ÎRœ>Ð XÑ
00
w
, so the nondimensional
time interval becomes . SubstitutingÐ X Ñ œ "ÎR?
w
the nondimensional variables in the discrete
equations of motion and omitting the prime
notation, we obtain the nondimensional state
equations:
AN EVOLUTIONARY APPROACH TO NONLINEAR DISCRETE - TIME OPTIMAL CONTROL WITH TERMINAL
CONSTRAINTS
53

(33) Z Ð3 "Ñ œ Z Ð3Ñ Ò+ =38 Ð3ÑÓÎR#
(34) BÐ3 "Ñ œ BÐ3Ñ Z Ð3Ñ-9= Ð3ÑÎR #
Ò+ =38 Ð3ÑÓ-9= Ð3ÑÎR
"
#
#
##
(35) CÐ3 "Ñ œ CÐ3Ñ Z Ð3Ñ=38 Ð3ÑÎR #
Ò+ =38 Ð3ÑÓ=38 Ð3ÑÎR
"
#
#
##
with initial conditions
(36) , Z Ð!Ñ œ ! BÐ!Ñ œ !ß CÐ!Ñ œ !
and terminal constraint
(37) CÐRÑ œ C
0
The optimal control problem now consists of finding
the sequence such as to maximize the range#Ð3Ñ
BÐRÑ, subject to the dynamical constraints (33-35),
the initial conditions (36) and the terminal
constraint (37), where is in units of and theC1>
0
#
0
final time is given.>
0
4 NECESSARY CONDITIONS FOR
ANOPTIMUM
In this section we present the traditional indirect
approach to the solution of the optimal control
problem, which is based on the first order necessary
conditions for an optimum. First, we derive the
Hamiltonian function for the above DVDP problem.
We then derive the adjoint dynamical equations for
the adjoint variables (the Lagrange multipliers) and
the optimality condition that needs to be satisfied by
the control sequence . Since we have used the#Ð3Ñ
symbol for the horizontal coordinate, we denoteB
the state variables by . So the state vector for this0
problem is
0 œÒZ B CÓ
X
The performance index and the terminal constraint
are given by
(38) NÐR Ñ œ Ò ÐR ÑÓ œ BÐR Ñ9 0
(39) <<ÐR Ñ œ Ò ÐR ÑÓ œ CÐR Ñ C œ !0
0
The Hamiltonian is defined byLÐ3Ñ
(40)
LÐ3Ñ œ Ð3 "ÑÖZ Ð3Ñ Ò+ =38 Ð3ÑÓÎR ×-#
Z
Ð3 "ÑÖBÐ3Ñ Z Ð3Ñ-9= Ð3ÑÎR -#
B
Ò+ =38 Ð3ÑÓ-9= Ð3ÑÎR ×
"
#
#
##
Ð3 "ÑÖCÐ3Ñ Z Ð3Ñ=38 Ð3ÑÎR -#
C
Ò+ =38 Ð3ÑÓ=38 Ð3ÑÎR ×
"
#
#
##
The augmented performance index is given by
(41) F9 /œ œ BÐRÑ ÒCÐR Ñ C Ó/<
X
0
The discrete Euler-Lagrange equations are derived
from the Hamiltonian function:
(42) --
ZZ
Z
Ð3Ñ œ L Ð3Ñ œ Ð3 "Ñ
-9= Ð3Ñ Ð3 "ÑÎR =38 Ð3Ñ Ð3 "ÑÎR#- #-
BC
(43) --
BB
B
Ð3Ñ œ L Ð3Ñ œ Ð3 "Ñ
(44) --
CC
C
Ð3Ñ œ L Ð3Ñ œ Ð3 "Ñ
It follows from the last two equations that the
multipliers and are constant. The final--
BC
Ð3Ñ Ð3Ñ
conditions for the multipliers are obtained from the
augmented function .F
(45)
-F9/<
Z
ZZ Z
ÐR Ñ œ ÐR Ñ œ ÐR Ñ ÐR Ñ œ !
-F9/<
B
BB B
ÐR Ñ œ ÐR Ñ œ ÐRÑ ÐR Ñ œ "
-F9/</
C
CC C
ÐR Ñ œ ÐR Ñ œ ÐR Ñ ÐRÑ œ
Since and are constant, they can be set equal--
BC
to their final values:
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
54

(46) ,--
BB
Ð3Ñ œ ÐR Ñ œ "
-- /
CC
Ð3Ñ œ ÐR Ñ œ
With the values given in (46), the equation for -
Z
Ð3Ñ
becomes
(47)
-- # /#
ZZ
Ð3Ñ œ Ð3 "Ñ -9= Ð3ÑÎR =38 Ð3ÑÎR
with final condition
(48) -
Z
ÐR Ñ œ !
The required control sequence is determined#Ð3Ñ
from the optimality condition
(49)
L Ð3Ñ œ Ð3 "Ñ-9= Ð3ÑÎR Z Ð3Ñ=38 Ð3ÑÎ
#
-# #
Z
R +=38 Ð3ÑÎÐ#R Ñ -9=Ð# Ð3ÑÑÎÐ#R Ñ ##
##
Z Ð3Ñ-9= Ð3ÑÎR +-9= Ð3ÑÎÐ#R Ñ/# /#
#
=38Ð# Ð3ÑÑÎÐ#R Ñ œ !/#
#
-
Z
Ð3 "Ñ is determined by the adjoint equation (47)
and the Lagrange multiplier is determined from/
the terminal equality constraint .CÐRÑ œ C
0
5 AN EVOLUTIONARY
APPROACH TO OPTIMAL
CONTROL
We now describe the direct approach using genetic
search. As was mentioned in Sec. , there is no need
to solve the two-point boundary value problem
described by the state equations (33-35) and the
adjoint equation (47), together with the initial
conditions (36), the final condition (48), the
terminal constraint (37) together with the optimality
condition (49) for the optimal control . Instead,#Ð3Ñ
the direct evolutionary method allows us to evolve a
population of solutions such as to maximize the
objective function or fitness function . TheJÐRÑ
initial population is built by generating a random
population of solutions , ,#Ð3Ñ 3 − Ò!ß R "Ó
uniformly distributed within a domain ,##−Ò
min
##1
max max
ÓœÎ#. Typical values are and either
#1#
min min
œ Î# œ! or depending on the
problem. The genetic algorithm evolves this initial
population using the operations of selection,
mutation and crossover over many generations such
as to maximize the fitness function:
(50) J ÐR Ñ œ N ÐR Ñ Ð" ÑN ÐR Ñ œαα
"
œ Ò ÐR ÑÓ Ð" Ñ Ò ÐR ÑÓ Ò ÐR ÑÓα9 α0<0<0 ,
T
with and and given by:α − Ò!ß "Ó N ÐRÑ N ÐRÑ
"
(51) NÐR Ñ œ Ò ÐR ÑÓ œ BÐR Ñ9 0
(52) N ÐRÑ œ Ò ÐRÑÓ œ ÐCÐRÑC Ñ
"0
##
< 0
For each member in the population of solutions, the
fitness function depends on the final values BÐRÑ
and , which are determined by solving theCÐRÑ
initial value problem defined by the state equations
(33-35) together with the initial conditions (36).
This process is repeated over many generations.
Here, we run the genetic algorithm for a
predetermined number of generations and then we
check if the terminal constraint (52) is fulfilled. If
the constraint is not fulfilled, we can either increase
the number of generations or readjust the weight
α − Ò!ß "Ó. After obtaining an optimal solution , we
can check the first order necessary conditions by
first solving the adjoint equation (47) with its final
condition (48). Once the control sequence is known,
the solution of (47-48) is obtained by direct iteration
backwards in time. We then check to what extent
the optimality condition (49) is fulfilled by
determining for andL Ð3Ñ œ /Ð3Ñ 3 − Ò!ß R "Ó
#
plotting the result as an error measuring the/Ð3Ñ
deviation from zero.
The results for the DVDP problem with gravity and
thrust, with and the terminal constraint+ œ !Þ&
Cœ!Þ"
0
are shown in Figs.(1-3). A value of
α œ!Þ!"was used. Fig.1 shows the evolution of the
solution over 50 generations. The best fitness and
the average fitness of the population are given. In all
calculations the size of the population was 50
members.
The control sequence , the velocity and#Ð3Ñ Z Ð3Ñ
the optimal trajectory are given in Fig.2 where the
sign of is reversed for plotting. The trajectoryC
obtained here was compared to that obtained by
Bryson (Bryson, 1999) using a gradient method and
the results are similar. In Fig.3 we plot the
expression for as given by.LÎ. Ð3Ñ#
the right-hand side of Eq.(49). Ideally, this should
be equal to zero at every point . However, since we3
AN EVOLUTIONARY APPROACH TO NONLINEAR DISCRETE - TIME OPTIMAL CONTROL WITH TERMINAL
CONSTRAINTS
55
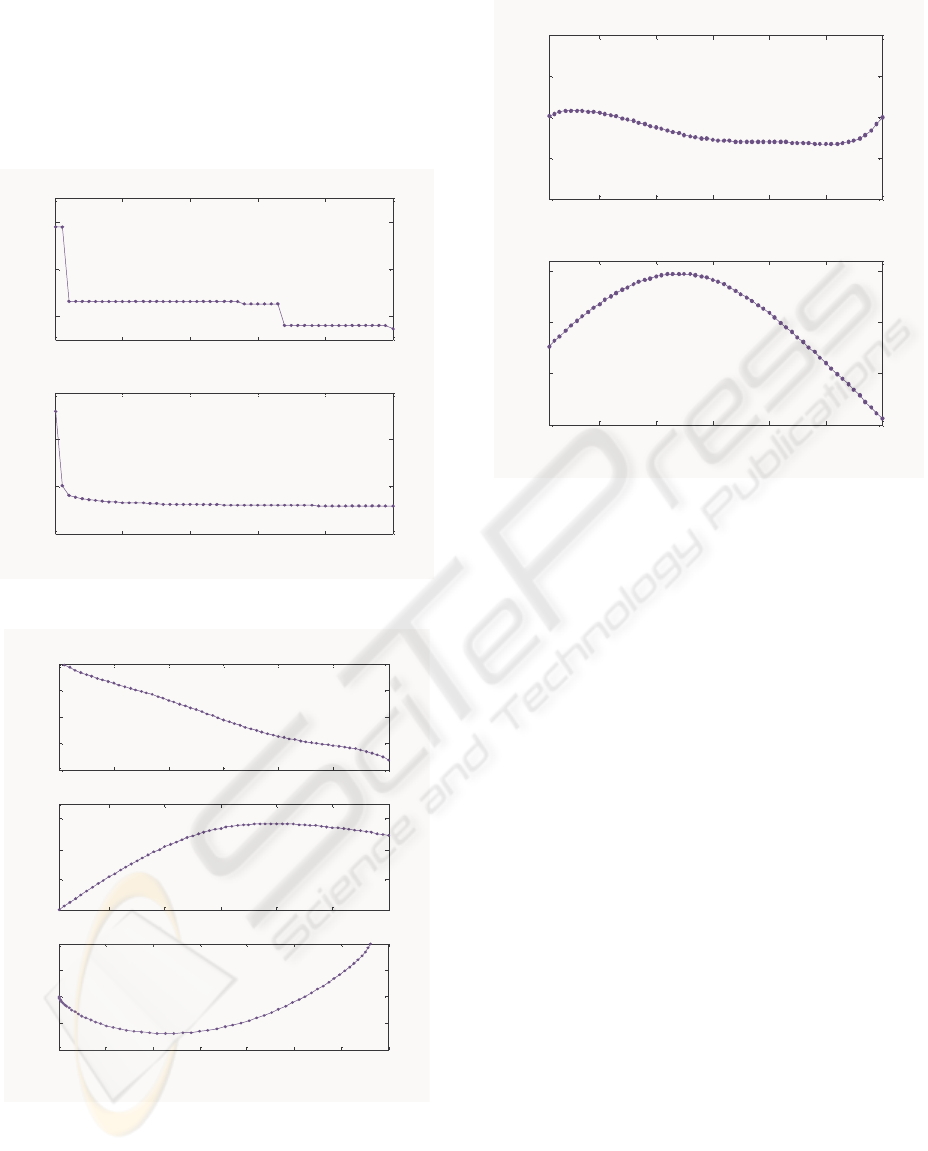
are not using (49) to determine the control
sequence, we obtain a small deviation from zero in
our calculation. Finally, after determining the
optimal solution, i.e. after the control and the
trajectory are known, the adjoint variable can-
Z
Ð3Ñ
be estimated by using Eqs.(47-48). The result is
shown in Fig.3.
0 10 20 30 40 50
-3.22
-3.2
-3.18
x 10
-3
Best f
0 10 20 30 40 50
-3.5
-3
-2.5
-2
x 10
-3
Generations
Average f
Figure 1: Convergence of the DVDP solution with gravity
and thrust, and terminal constraint + œ !Þ& C œ !Þ"
0
0 10 20 30 40 50 60
-1
-0.5
0
0.5
1
i
gama / (pi/2)
10 20 30 40 50 60
0
0.2
0.4
0.6
i
V / g t
f
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
-0.1
-0.05
0
0.05
0.1
x / (g t
f
2
)
y / (g t
f
2
)
Figure 2: The control sequence , the velocity and#Ð3Ñ Z Ð3Ñ
the optimal trajectory for the DVDP problem with gravity
1 + œ !Þ& C œ !Þ", thrust and terminal constraint .
0
The sign of is reversed for plottingC
10 20 30 40 50 60
-0.02
-0.01
0
0.01
0.02
i
e
10 20 30 40 50 60
0
0.5
1
1.5
i
LambdaV
Figure 3: The error measuring the deviation of the/Ð3Ñ
optimality condition from zero, and theLÐ3Ñœ/Ð3Ñ
#
adjoint variable as a function of the discrete-time-
Z
Ð3Ñ
counter . DVDP with gravity and thrust, . Here3+œ!Þ&
Rœ'!time steps
6 CONCLUSIONS
A new method for solving the discrete-time optimal
control problem with terminal constraints was
developed. The method seeks the best control
sequence diretly by genetic search and does not
make use of the first-order necessary conditions to
find the optimum. As a consequence, the need to
develop a Hamiltonian formulation and the need to
solve a difficult two-point boundary value problem
for finding the adjoint variables is completely
avoided. This has a significant advantage in more
advanced and higher order problems where it is
difficult to solve the TPBVP with large systems of
differential equations, but when it is still easy to
solve the initial value problem (IVP) for the state
variables. The method was demonstrated by solving
a discrete-time optimal control problem, namely, the
DVDP or the discrete velocity direction
programming problem that was pioneered by Bryson
using both analytical and gradient methods. This
problem includes the effects of gravity and thrust
and was solved easily using the proposed approach.
The results compared favorably with those of
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
56

Bryson, who used analytical and gradient
techniques.
REFERENCES
Bryson, A. E. and Ho, Y. C., Applied Optimal Control,
Hemisphere, Washington, D.C., 1975.
Bryson, A.E., Dynamic Optimization, Addison-Wesley
Longman, Menlo Park, CA, 1999.
Coleman, T.F. and Liao, A., An efficient trust region
method for unconstrained discrete-time optimal
control problems, Computational Optimization and
Applications, 4, pp. 47-66, 1995.
Dunn, J., and Bertsekas, D.P., Efficient dynamic
programming implementations of Newton's method for
unconstrained optimal control problems, J. of
Optimization Theory and Applications, 63 (1989), pp.
23-38.
Fogel, D.B., Evolutionary Computation, The Fossil
Record, IEEE Press, New York, 1998.
Fox, C., An Introduction to the Calculus of Variations,
Oxford University Press, London, 1950.
Jacobson, D. and Mayne, D. , Differential Dynamic
Programming, Elsevier Science Publishers, 1970.
Kirkpatrick, and Gelatt, C.D. and Vecchi, Optimization
by Simulated Annealing, Science, 220, 671-680,
1983.
Laarhoven, P.J.M. and Aarts, E.H.L., Simulated
Annealing: Theory and Applications, Kluwer
Academic, 1989.
Liao, L.Z. and Shoemaker, C.A., Convergence in
unconstrained discrete-time differential dynamic
programming, IEEE Trans. Automat. Contr., 36, pp.
692-706, 1991.
Mayne, D., A second-order gradient method for
determining optimal trajectories of non-linear discrete
time systems, Intnl. J. Control, 3 (1966), pp. 85-95.
Michalewicz, Z., Genetic Algorithms + Data Structures =
Evolution Programs, Springer-Verlag, Berlin, 1992a.
Michalewicz, Z., Janikow, C.Z. and Krawczyk, J.B., A
Modified Genetic Algorithm for Optimal Control
Problems, Computers Math. Applications, 23(12), pp.
83-94, 1992b.
Murray, D.M. and Yakowitz, S.J., Differential dynamic
programming and Newton's method for discrete
optimal control problems, J. of Optimization Theory
and Applications, 43, pp. 395-414, 1984.
Ohno, K., A new approach of differential dynamic
programming for discrete time systems, IEEE Trans.
Automat. Contr., 23 (1978), pp. 37-47.
Pantoja, J.F.A. de O. , Differential Dynamic Programming
and Newton's Method, International Journal of
Control, 53: 1539-1553, 1988.
Pontryagin, L. S. Boltyanskii, V. G., Gamkrelidze, R. V.
and Mishchenko, E. F., The Mathematical Theory of
Optimal Processes, Moscow, 1961, translated by
Trirogoff, K. N. Neustadt, L. W. (Ed.), Interscience,
New York, 1962.
Schwefel H.P., Evolution and Optimum Seeking, Wiley,
New York, 1995.
Yakowitz, S.J., and Rutherford, B., Computational
aspects of discrete-time optimal control, Appl. Math.
Comput., 15 (1984), pp. 29-45.
AN EVOLUTIONARY APPROACH TO NONLINEAR DISCRETE - TIME OPTIMAL CONTROL WITH TERMINAL
CONSTRAINTS
57
