
VISUAL SERVOING TECHNIQUES FOR CONTINUOUS
NAVIGATION OF A MOBILE ROBOT
N. Garc
´
ıa, O. Reinoso, J.M. Azor
´
ın
Dept. Ingenier
´
ıa de Sistemas Industriales. Universidad Miguel Hern
´
andez.
Avd. de la Universidad s/n. Edif. Torreblanca. 03202 Elche, Spain
E. Malis
Institut National de Recherche en Informatique et Automatique
2004, route des Lucioles - B.P. 93, 06902 Sophia Antipolis Cedex, France.
R. Aracil
Departamento de Automtica, Electrnica e Informtica Industrial Universidad Politcnica de Madrid.
ETSII c/ Jos Gutirrez Abascal, 2 E-28006 Madrid, Spain.
Keywords:
Visual servoing, mobile robots, navigation, control.
Abstract:
A new method to control the navigation of a mobile robot which is based on visual servoing techniques is
presented. The new contribution of this paper could be divided in two aspects: the first one is the solution
of the problem which takes place in the control law when features appear or disappear from the image plane
during the navigation; and the second one is the way of providing to the control system the reference path that
must be followed by the mobile robot. The visual servoing techniques used to carry out the navigation are the
image-based and the intrinsic-free approaches. Both are independent of calibration errors which is very useful
since it is so difficult to get a good calibration in this kind of systems. Also, the second technique allows us to
control the camera in spite of the variation of its intrinsic parameters. So, it is possible to modify the zoom of
the camera, for instance to get more details, and drive the camera to its reference position at the same time. An
exhaustive number of experiments using virtual reality worlds to simulate a typical indoor environment have
been carried out.
1 INTRODUCTION
The framework for robot navigation is based on pre-
recorded image features obtained during a training
walk. Then, we want that the mobile robot repeat
the same walk by means of image-based and invari-
ant visual servoing techniques in a continuous way.
In this point, the question is what does a continuous
way mean?. Well, the answer to this question will be
developed in the following sections of the paper but
in advance the concept continuous way is referred to
assure the continuity of the control law with the ap-
pearance/disappearance of image features during the
control task.
There are some references about using pre-
recorded images to control the navigation of a mobile
robot but all of these applications use them in a dif-
ferent way. For instance, in (Matsumoto et al., 1996)
the control system proposed for the navigation of a
mobile robot is based on a visual representation of
the route called ”View-Sequenced Route Representa-
tion(VSRR)”. After the VSRR was acquired, the robot
repeat the walk using an appearance-based method to
control it by comparing the current view with pre-
recorded one (VSRR).
There are some applications using visual servo-
ing techniques for navigation of a mobile robot. In
(R. Swain-Oropeza, 1997), the application of a visual
servoing approach to a mobile robot which must ex-
ecute coordinate motions in a known indoor environ-
ment is presented. The main contribution of this paper
was the execution of a path expressed as sequence of
several basic motions(like Go to an object, Follow a
wall, Turn around a corner,...):each one is a visually-
guide movement. In our case, the approximation pro-
posed to the navigation is totally different in the way
of dealing with the features which go in/out of the
image plane during the path and similar to some ref-
erences, commented above, in the way of specifying
the path to be followed by the robot.
2 AUTONOMOUS NAVIGATION
USING VISUAL SERVOING
TECHNIQUES
The key idea of this method is to divide the au-
tonomous navigation in two stages: the first one is the
training step and the second one is the autonomous
343
García N., Reinoso O., M. Azorín J., Malis E. and Aracil R. (2004).
VISUAL SERVOING TECHNIQUES FOR CONTINUOUS NAVIGATION OF A MOBILE ROBOT.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 343-348
DOI: 10.5220/0001134903430348
Copyright
c
SciTePress
navigation step. During the training step, the robot is
human commanded via radio link or whatever inter-
face and every sample time the robot acquires an im-
age, computes the features and stores them in mem-
ory. Then, from near its initial position, the robot re-
peat the same walk using the reference features ac-
quired during the training step. The current features
and a visual servoing approach is used to minimize
the error between current and reference features.
2.1 Control law
To carry out the autonomous navigation of robot, the
image-based and invariant visual servoing approaches
was used (Hutchinson et al., 1996)(Malis and Cipolla,
2000). Both approaches are based on the selection of
a set s of visual features or a set q of invariant features
that has to reach a desired value s
∗
or q
∗
. Usually, s is
composed of the image coordinates of several points
belonging to the considered target and q is computed
as the projection of s in the invariant space calculated
previously. In the case of our navigation method, s
∗
or q
∗
is variable with time since in each sample time
the reference features is updated with the desired tra-
jectory of s or q stored in the robot memory in order
to indicate the path to be followed by the robot.
To simplify in this section, the formulation pre-
sented is only referred to image-based visual servo-
ing. All the formulation of this section can be applied
directly to the invariant visual servoing approach
changing s by q. The visual task function(Samson
et al., 1991) is defined as the regulation of an error
function:
e = C(s − s
∗
(t)) (1)
The derivative of the task function,considering C con-
stant, will be:
˙e = CLv − C ˙s
∗
(2)
where v = (V
T
, ω
T
) is the camera velocity screw
and L is the interaction matrix.
A simple control law can be obtained by imposing
the exponential convergence of the task function to
zero:
˙e = −λ e so CLv = −λ e + C ˙s
∗
(3)
where λ is a positive scalar factor which tunes the
speed of convergence:
v = −λ (CL)
−1
e + (CL)
−1
C ˙s
∗
(4)
if C is setting to L
+
, then (CL) > 0 and the task
function converge to zero and, in the absence of local
minima and singularities, so does the error s − s
∗
. Fi-
nally substituting C by L
+
in equation (8), we obtain
the expression of the camera velocity that is sent to
the robot controller:
v = −λ L
+
(s − s
∗
(t)) + L
+
˙s
∗
(5)
3 DISCONTINUITIES IN VISUAL
NAVIGATION
In this section, we describe more in details the discon-
tinuity problem that occurs when some features go
in/out of the image during the vision-based control.
The navigation of a mobile robot is a typical example
where this kind of problems are produced.
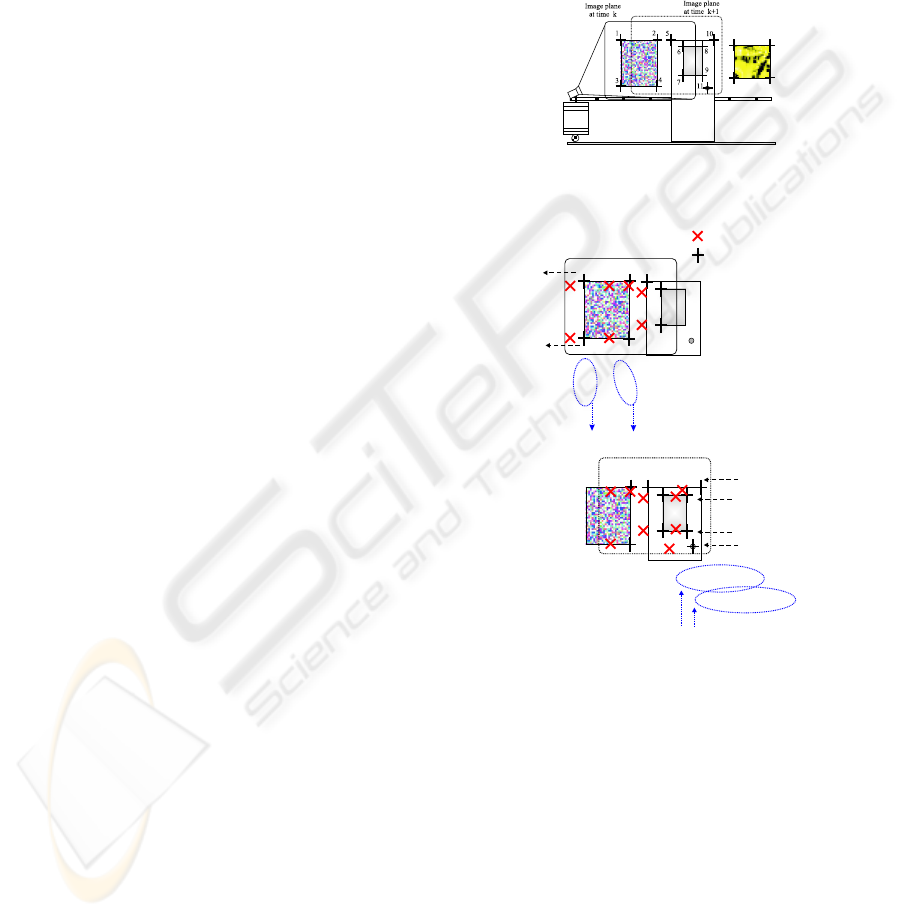
(a) Croquis of the au-
tonomous navigation of the
robot
1 2
3
4
5
6
7
Image plane at time k
2
4
5
6
7
8
9
11
10
Image plane at time k+1
1
3
2
4
5
7
6
2
4
5
6
7
8
9
10
11
at time k+1
at time k+1
Reference features
Current features
s = ( , s , , s , s , s ,s )s s
1 32 4 5 6 7
T
s = ( , )
* T
s
*
1
s , , s , s , s , s
* * * * *
2 4 5 6 7
s
*
3
Remove
s = ( s , s , s , s , s )
2 4 5 6 7
T
, s , s , s , s
8 9 10 11
Add
s = ( s , s , s , s , s , )
* * * * * * T
2 4 5 6 7
s , s , s , s
* * * *
8 9 10 11
(b) Appearance/Disappearance of
image features from time k to k+1
Figure 1: Navigation of a mobile robot controlled by visual
servoing techniques.
During autonomous navigation of the robot, some
features appear or disappear from the image plane so
they will must be added to or removed from the visual
error vector (Figure 1). This change in the error vec-
tor produces a jump discontinuity in the control law.
The magnitude of the discontinuity in control law de-
pends on the number of the features that go in or go
out of the image plane at the same time, the distance
between the current and reference features, and the
pseudoinverse of interaction matrix.
In the case of using the invariant visual servoing ap-
proach to control the robot, the effect produced by the
ICINCO 2004 - ROBOTICS AND AUTOMATION
344

appearance/disappearance of features could be more
important since the invariant space Q used to compute
the current and the reference invariant points(q, q
∗
)
changes with features(Malis, 2002c).
4 CONTINUOUS CONTROL LAW
FOR NAVIGATION
In the previous section, the continuity problem of the
control law due to the appearance/disappearance of
features has been shown. In this section a solution
based on weighted features is presented.
4.1 Weighted features
The question is What is a weighted feature?. The an-
swer is obvious it’s a feature which is pre-multiplied
by a factor called weight. This weight is going to be
used in order to anticipate in some way the possible
discontinuities produced in the control law by the ap-
pearance/disappearance of the image features.
The key idea in this formulation is that every fea-
ture (points, lines, moments, etc) has its own weight
which may be a function of image coordinates(u,v)
and/or a function of the distance between feature
points and an object which would be able to occlude
them, etc. In this paper the weights are computed by
a function that depends on the position of image fea-
ture(u,v). Representing the weight as γ
y
, the function
that has been used and tested to compute the magni-
tude of the weights is:
γ
y
(x) =
e
−
(x−x
med
)
2n
(x−x
min
)
m
(x
max
−x)
m
x
min
< x < x
max
0 x = {x
min
, x
max
}
The function weight γ
y
(x) is a bell-shaped func-
tion which is symmetrical respect to x
med
=
x
min
+x
max
2
.With n, m parameters, the shape of the
bell function can be controlled. Their values must be
chosen according to the following conditions:
γ
y
(x
min
+ β(x
max
− x
min
)) ≥ 1 − α
γ
y
(x
min
+
β
2
(x
max
− x
min
)) ≤ α
where 0 < α < 0.5 and 0 < β < 0.5. if the condi-
tions (6)are verified then the following conditions are
truth too:
γ
y
(x
max
− β(x
max
− x
min
)) ≥ 1 − α
γ
y
(x
max
−
β
2
(x
max
− x
min
)) ≤ α
where 0 < α < 0.5 and 0 < β < 0.5. For each
feature with (u
i
, v
i
) coordinates, a weight γ
y
(x) for
its u
i
and v
i
coordinates can be calculated using the
definition of the function γ
y
(x) (γ
i
u
= γ
y
(u
i
) and
γ
i
v
= γ
y
(v
i
) respectively). Finally, for every image
feature, a total weight that will be denoted (γ
i
uv
) is
computed by multiplying the weight of its u coordi-
nate (γ
i
u
) by the weight of its v coordinate (γ
i
v
).
4.2 Smooth Task function
Suppose that n matched points are available in the
current image and in the reference features stored.
Everyone of these points(current and reference) will
have a weight γ
i
uv
which can be computed as it’s
shown in the previous subsection 4.1. With them and
their weights, a task function can be built (Samson
et al., 1991):
e = CW (s − s
∗
(t)) (6)
where W is a (2n × 2n) diagonal matrix where its
elements are the weights γ
i
uv
of the current features
multiplied by the weights of the reference features.
The derivate of the task function,considering C
constant, will be:
˙e = CW Lv − CW˙s
∗
+ C
˙
W (s − s
∗
) (7)
A simple control law can be obtained by imposing the
exponential convergence of the task function to zero
(˙e = −λ e):
CWLv − CW˙s
∗
+ C
˙
W(s − s
∗
) = −λe (8)
Let us suppose that these weights γ
i
uv
are varying
slowly, then
˙
W can be considered nearly equal to
zero (
˙
W ≈ 0). Considering this assumption, the
equation (8) can be rewritten as:
v = −λ (CWL)
−1
e + (CWL)
−1
CW˙s
∗
(9)
Setting C = (WL)
+
, if (CWL) > 0 then the task
function converges to zero and, in the absence of local
minima and singularities, so does the error s − s
∗
.
Finally substituting C by (WL)
+
in equation (9), we
obtain the expression of the camera velocity that is
sent to the robot controller:
v = −λ (WL)
+
W(s−s
∗
(t))+(WL)
+
W˙s
∗
(10)
4.3 Invariant visual servoing with
weighted features
The theoretical background about invariant vi-
sual servoing can be extensively found in (Malis,
2002b)(Malis, 2002c). In this section, we modify the
approach in order to take into account weighted fea-
tures. Suppose that n image points are available. The
weights γ
i
used in the weighted invariant visual ser-
voing are obtained as follows:
γ
i
=
v
u
u
u
t
n
n
X
i=1
(γ
i
uv
)
2
· γ
i
uv
(11)
The weights γ
i
uv
defined in the previous subsection
are redistributed in order to have
P
γ
i
2
= n. Ev-
ery image point with projective coordinates p
i
=
VISUAL SERVOING TECHNIQUES FOR CONTINUOUS NAVIGATION OF A MOBILE ROBOT
345

(u
i
, v
i
, 1) is multiplied by its own weight γ
i
in or-
der to obtain a weighted point p
γ
i
i
= γ
i
p
i
. Using
all the weighted points we can compute the following
symmetric (3×3) matrix:
S
γ
i
p
=
1
n
n
X
i=1
p
γ
i
i
p
γ
i
i
>
(12)
The image points depends on the upper triangular ma-
trix K containing the camera intrinsic parameter and
on the normalized image coordinates m
i
: p
i
= Km
i
.
Thus, we have p
γ
i
i
= K(γ
i
m
i
) = Km
γ
i
i
and the ma-
trix S
γ
i
p
can be written as follows:
S
γ
i
p
=
1
n
n
X
i=1
p
γ
i
i
p
γ
i
>
i
= K S
γ
i
m
K
>
(13)
where S
γ
i
m
is a symmetric matrix which is does not di-
rectly depend on the camera parameters. If the points
are not collinear and n > 3 then S
γ
i
p
and S
γ
i
m
are posi-
tive definite matrices and they can be written, using a
Cholesky decomposition, as:
S
γ
i
p
= T
γ
i
p
T
γ
i
p
>
and S
γ
i
m
= T
γ
i
m
T
γ
i
m
>
(14)
From equations (13) and (14), the two transformation
matrices, can be related by:
T
γ
i
p
= K T
γ
i
m
(15)
The matrix T
γ
i
p
defines a projective transformation
and can be used to define a point in a new projective
space Q
γ
i
:
q
i
= T
γ
i
p
−1
p
i
= T
γ
i
m
−1
K
−1
p
i
= T
γ
i
m
−1
m
i
(16)
The new projective space Q
γ
i
does not depend di-
rectly on camera intrinsic parameters but it only de-
pends on the weights γ
i
and on the normalized points.
The normalized points m
i
depends on a (6×1) vec-
tor ξ containing global coordinates of an open subset
subset S ⊂ R
3
× SO(3) (i.e. represents the posi-
tion of the camera in the Cartesian space). Suppose
that a reference image of the scene, corresponding to
the reference position ξ
∗
has been stored and com-
puted the reference points p
∗
i
in a previous learning
step. The camera parameters K
∗
are eventually dif-
ferent from the current camera parameters. We use
the same weights γ
i
to compute the weighted refer-
ence p
∗γ
i
i
= γ
i
p
∗
i
. Similarly to the current image, we
can define a reference projective space:
q
∗
i
= T
γ
i
p
∗
−1
p
∗
i
= T
γ
i
m
∗
−1
m
∗
i
(17)
Note that, since the weights in equations (16) and (17)
are the same, if ξ = ξ
∗
then q
i
= q
∗
i
∀ i ∈ {1, . . . , n}
and the converse is true even if the intrinsic parame-
ters change during the servoing.
4.3.1 Control in the weighted invariant space
Similarly to the standard invariant visual servoing,
the control of the camera is achieved by stacking
all the reference points of space Q
γ
i
in a (3n×1)
vector s
∗
(ξ
∗
) = (q
∗
1
(t), q
∗
2
(t), · · · , q
∗
n
(t)). Sim-
ilarly, the points measured in the current camera
frame are stacked in the (3n×1) vector s(ξ) =
(q
1
(t), q
2
(t), · · · , q
n
(t)). If s(ξ) = s
∗
(ξ
∗
) then
ξ = ξ
∗
and the camera is back to the reference po-
sition whatever the camera intrinsic parameters. The
derivative of vector s is:
˙
s = L v (18)
where the (3n×6) matrix L is called the interac-
tion matrix and v is the velocity of the camera.
The interaction matrix depends on current normal-
ized points m
i
(ξ) ∈ M (m
i
can be computed from
image points m
i
= K
−1
p
i
), on the invariant
points q
i
(ξ) ∈ Q
γ
, on the current depth distribu-
tion z(ξ) = (Z
1
, Z
2
, ..., Z
n
) and on the current re-
distributed weights γ
i
. The interaction matrix in the
weighted invariant space (L
γ
i
qi
= T
γ
i
mi
(L
mi
−C
γ
i
i
))is
obtained like in (Malis, 2002a) but the term C
γ
i
i
must be recomputed in order to take into account the
redistributed weights γ
i
.
In order to control the movement of the camera,
we use the control law (10) where W depends on the
weights previously defined and L is the interaction
matrix recomputed for the invariant visual servoing
with weighted features.
5 EXPERIMENTS IN A VIRTUAL
INDOOR ENVIRONMENT
Exhaustive experiments have been carried out using
a virtual reality tool for modelling an indoor envi-
ronment. To make more realistic simulation, errors
in intrinsic and extrinsic parameters of the camera
mounted in the robot have been considered. An es-
timation
b
K of the real matrix K has been used with
an error of 25% in focal length and a deviation of
50 pixels in the position of the optical center. Also
an estimation
b
T
RC
of the camera pose respect to the
robot frame has been computed with a rotation er-
ror of uθ = [3.75 3.75 3.75]
T
degrees and transla-
tion error of t = [2 2 0]
T
cm. We are only going
to present the results of one experiment where image
based and invariant visual servoing and the new for-
mulation with weighted features are used to control
the autonomous navigation of an holonomic mobile
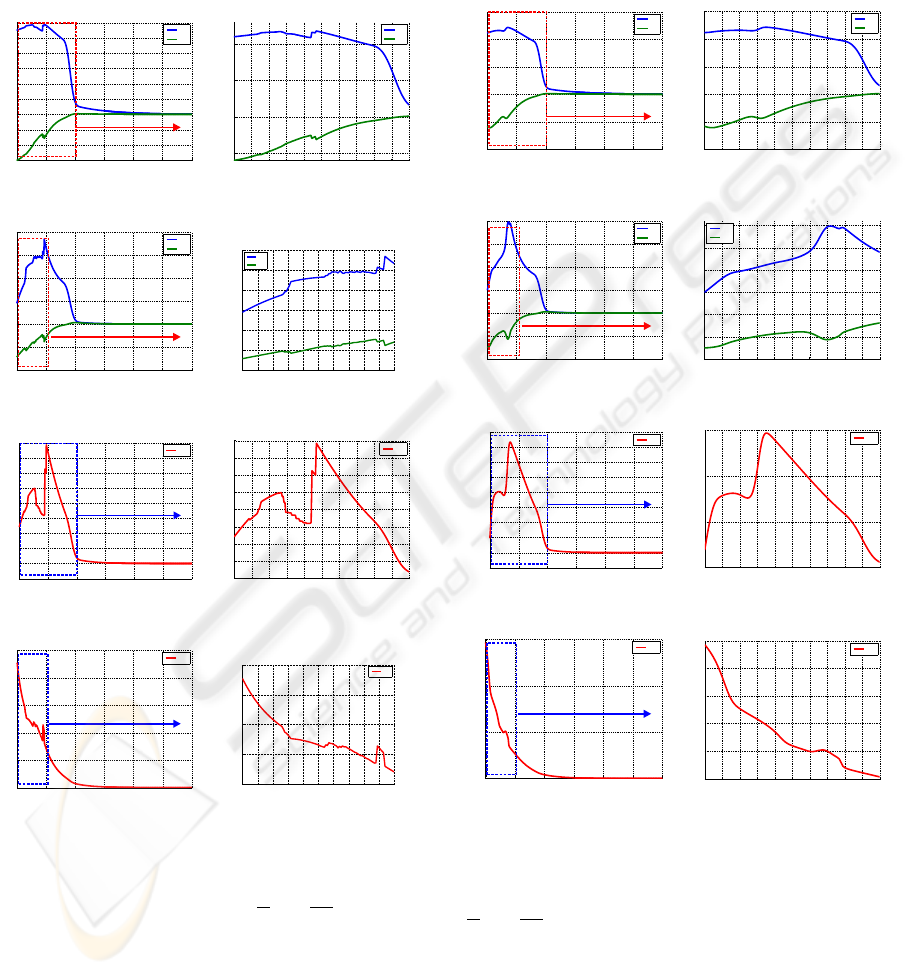
robot. In Figure 3, the control signals sent to the robot
controller using the image-based and invariant visual
servoing approaches are shown. In Figure 3 (b,d,f,h),
ICINCO 2004 - ROBOTICS AND AUTOMATION
346
details of the control law, where the discontinuities
can be clearly appreciated, are presented. To show
the improvements of the new formulation presented in
this paper, the control law using the image-based and
invariant visual servoing with weighted features can
be seen in Figure 4. The same details of the control
law shown in Figure 3 (b,d,f,h) are presented in Fig-
ure 4 (b,d,f,h). Observing both figures, the improve-
ments respect to the continuity of the control law are
self-evident.
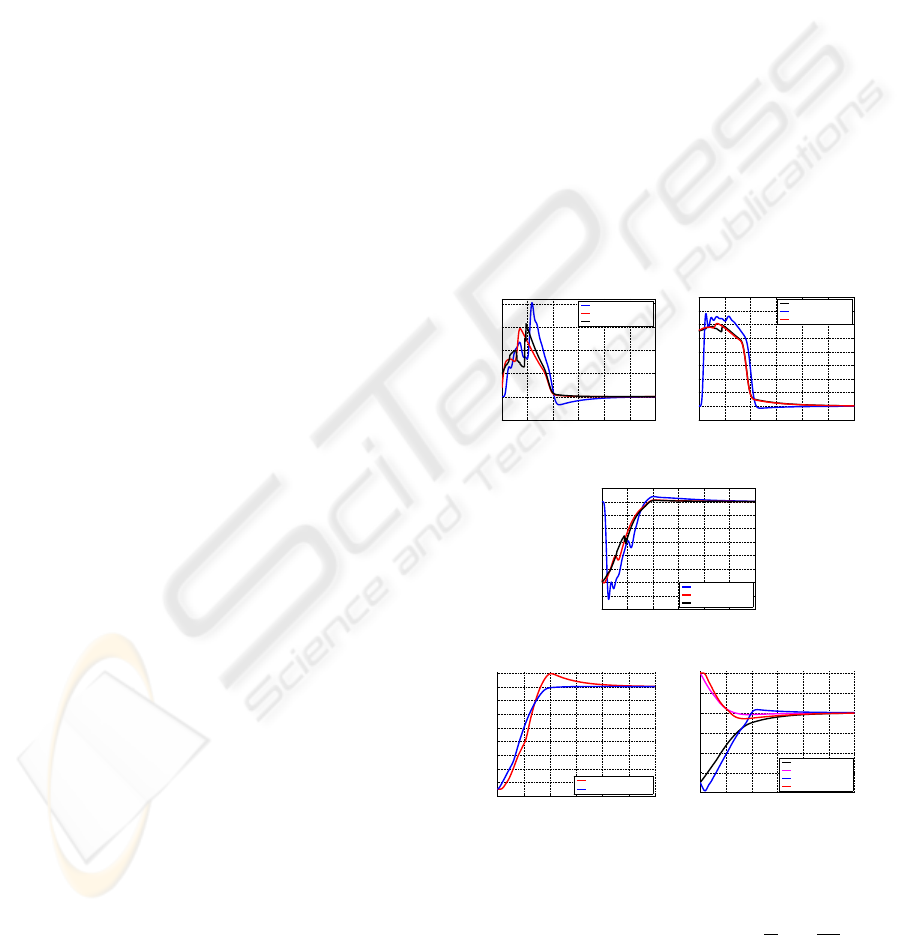
Some experiments using a filter to avoid the effects
of the discontinuities in the control law have been car-
ried out too. A 8th order butterworth lowpass digi-
tal filter has been designed to overpass the disconti-
nuities produced by the appearance/disappearance of
image features. In Figure 2 (a,b,c), the continuity of
the control law using a filter or weighted features and
the discontinuity with the classical image-based ap-
proach can be seen. However the trajectory of the
mobile robot is not the same using weighted features
than filtering the control law (Figure 2 (d,e)). Fur-
thermore the trajectory error when the control law is
filtered needs more time to stabilize than when the
formulation with weighted features is used.
6 CONCLUSION
In this paper the originally formulation of two visual
servoing approaches, which avoids the discontinuities
in the control law when features go in/out of the im-
age plane during the control task, is presented and
tested by several experiments in a virtual indoor en-
vironment. The results presented corroborate that the
new approach to the problem works better than a sim-
ple filter of the control signals. The validation of this
results with a real robot is on the way by using a
B21r mobile robot from iRobot company. As a fu-
ture work, it would be interesting to test another kind
of weighted functions.
REFERENCES
Hutchinson, S. A., Hager, G. D., and Corke, P. I. (1996). A
tutorial on visual servo control. IEEE Trans. Robotics
and Automation, 12(5):651–670.
Malis, E. (2002a). Stability analysis of invariant visual
servoing and robustness to parametric uncertainties.
In Second Joint CSS/RAS International Workshop on
Control Problems in Robotics and Automation, Las
Vegas, Nevada.
Malis, E. (2002b). A unified approach to model-based
and model-free visual servoing. In European Confer-
ence on Computer Vision, volume 2, pages 433–447,
Copenhagen, Denmark.
Malis, E. (2002c). Vision-based control invariant to camera
intrinsic parameters: stability analysis and path track-
ing. In IEEE International Conference on Robotics
and Automation, volume 1, pages 217–222, Washing-
ton, USA.
Malis, E. and Cipolla, R. (2000). Self-calibration of zoom-
ing cameras observing an unknown planar structure.
In Int. Conf. on Pattern Recognition, volume 1, pages
85–88, Barcelona, Spain.
Matsumoto, Y., Inaba, M., and Inoue, H. (1996). Vi-
sual navigation using view-sequenced route represen-
tation. In IEEE International Conference on Robotics
and Automation (ICRA’96), volume 1, pages 83–88,
Minneapolis, USA.
R. Swain-Oropeza, M. D. (1997). Visually-guided naviga-
tion of a mobile robot in a structured environment. In
International Symposium on Intelligent Robotic Sys-
tems (SIRS’97), Stockholm, Sweden.
Samson, C., Le Borgne, M., and Espiau, B. (1991). Robot
Control: the Task Function Approach. volume 22 of
Oxford Engineering Science Series.Clarendon Press.,
Oxford, UK, 1st edition.
0 100 200 300 400 500 600
−0.05
0
0.05
0.1
0.15
0.2
iterations number
ω
z
Rotation speed
ω
z
( filter )
ω
z
( weighted features )
ω
z
(a)
0 100 200 300 400 500 600
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
iterations number
V
x
Traslational speed V
x
v
x
v
x
( filter )
v
x
( weighted features )
(b)
0 100 200 300 400 500 600
−0.8
−0.7
−0.6
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
v
y
( filter )
v
y
( weighted features )
v
y
Traslational speed V
y
V
y
Iterations number
(c)
0 100 200 300 400 500 600
−8
−7
−6
−5
−4
−3
−2
−1
0
1
Iterations number
u
z
θ
u
z
θ ( filter )
u
z
θ ( weighted features )
(d)
0 100 200 300 400 500 600
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
Iterations number
t
t
x
( weighted features )
t
y
( weighted features )
t
x
( filter )
t
y
( filter )
(e)
Figure 2: Image-based visual servoing approach: classical,
with weighted features and using a filter. The translation
and rotation errors are measured respectively in m and deg,
while speeds are measured respectively in
m
s
and
deg
s
.
VISUAL SERVOING TECHNIQUES FOR CONTINUOUS NAVIGATION OF A MOBILE ROBOT
347
0 100 200 300 400 500 600
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Traslation speed
Iterations number
v
v
x
v
y
Detail
(a) Image-based
0 20 40 60 80 100 120 140 160 180 200
−0.5
0
0.5
1
Traslation speed
Iterations number
v
v
x
v
y
(b) Details
0 100 200 300 400 500 600
-1
-0.5
0
0.5
1
1.5
2
Traslation speed
Iterations number
v
v
x
v
y
Detail
(c) Invariant
0 10 20 30 40 50 60 70 80 90 100
−1
−0.5
0
0.5
1
1.5
2
v
x
v
y
(d) Details
0 100 200 300 400 500 600
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Rotation speed
Iterations number
w
w
z
Detail
(e) Image-based
0 20 40 60 80 100 120 140 160 180 200
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Rotation speed
Iterations number
ω
ω
z
(f) Details
0 100 200 300 400 500 600
0
0.05
0.1
0.15
0.2
0.25
Rotation speed
Iterations number
w
w
z
Detail
(g) Invariant
0 10 20 30 40 50 60 70 80 90 100
0.05
0.1
0.15
0.2
0.25
ω
z
(h) Details
Figure 3: Control law: Image-based(a,b,e,f) and invari-
ant(c,d,g,h) visual servoing. The translation and rotation
speeds are measured respectively in
m
s
and
deg
s
0 100 200 300 400 500 600
-1
-0.5
0
0.5
1
1.5
Traslation speed
Iterations number
v
v
x
v
y
Detail
(a) Image-based
0 20 40 60 80 100 120 140 160 180 200
−1
−0.5
0
0.5
1
1.5
Traslation speed
Iterations number
v
v
x
v
y
(b) Details
0 100 200 300 400 500 600
-1
-0.5
0
0.5
1
1.5
2
Traslation speed
Iterations number
v
v
x
v
y
Detail
(c) Invariant
0 10 20 30 40 50 60 70 80 90 100
−1
−0.5
0
0.5
1
1.5
2
Traslation speed
Iterations number
v
v
x
v
y
(d) Details
0 100 200 300 400 500 600
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Rotation speed
Iterations number
w
w
z
Detail
(e) Image-based
0 20 40 60 80 100 120 140 160 180 200
0
0.05
0.1
0.15
Rotation speed
Iterations number
ω
ω
z
(f) Details
0 100 200 300 400 500 600
0
0.1
0.2
0.3
Rotation speed
Iterations number
w
w
z
Detail
(g) Invariant
0 10 20 30 40 50 60 70 80 90 100
0.05
0.1
0.15
0.2
0.25
0.3
Rotation speed
Iterations number
ω
ω
z
(h) Details
Figure 4: Control law: Image-based(a,b,e,f) and invari-
ant(c,d,g,h) visual servoing with weighted features. The
translation and rotation speeds are measured respectively in
m
s
and
deg
s
ICINCO 2004 - ROBOTICS AND AUTOMATION
348
