
A DISTURBANCE COMPENSATION CONTROL FOR AN
ACTIVE MAGNETIC BEARING SYSTEM BY A MULTIPLE
FXLMS ALGORITHM
Min Sig Kang
Department of mechanical engineering, Kyungwon University, Sungnam, Kyunggido, KOREA
Joon Lyou
Dept. of Electronics Eng., Chungnam National Univ., Daejeon 305-764, KOREA
Keywords: Active magnetic bearing, Multiple filtered-x least mean square algorithm, Acceleration feedforward
compensation
Abstract: In this paper, a design technique is proposed for a disturbance feedforward compensation control to
attenuate disturbance responses in an active magnetic bearing system, which is subject to base motion. To
eliminate the sensitivity of model accuracy to disturbance responses, the proposed design technique is an
experimental feedforward compensator, developed from an adaptive estimation, by means of the Multiple
Filtered-x least mean square (MFXLMS) algorithm. The compensation control is applied to a 2-DOF active
magnetic bearing system subject to base motion. The feasibility of the proposed technique is illustrated, and
the results of an experimental demonstration are shown.
1 INTRODUCTION
Active magnetic bearing (AMB) systems are
increasingly used in industrial applications. Unlike
conventional bearings, AMB systems utilize
magnetic fields to levitate and support a shaft in an
air-gap within the bearing stator. When compared to
conventional mechanical bearings, AMB offers the
following unique advantages: non-contact,
elimination of lubrication, low power loss, and
controllability of bearing dynamic characteristics.
Recently, interest has increased regarding the
application of AMB systems to the sight
stabilization systems mounted on moving vehicles.
When a vehicle is undergoing angular motion, the
mirror axis of sight rotates relative to the vehicle, to
stabilize the line of sight. In such systems, the
friction of mechanical bearings that support the
mirror axis may cause tracking errors and, hence,
may deteriorate the quality of an image obtained
through electro-optical equipment. To eliminate the
undesirable effects of friction, an AMB system is
used instead of mechanical bearings.
The main problem of a sight system levitated
and stabilized by an AMB is the image scattering
caused by base motion. One solution for reducing
the effects of base motion is to expand the
bandwidth of the control system by using feedback
controls (Cole, 1998) such as PID control, state
feedback control,
∞
H
control, and so on. A
controller with a wider bandwidth, however,
requires a higher sampling frequency, which often
induces a mechanical resonance.
An alternative approach for disturbance
attenuation is a feedforward compensation of the
base acceleration. The effectiveness of this approach
has been demonstrated in the field of hard disk
drives, which are also subject to base motion
(Jinzenji, 2001). Suzuki (1998) developed
feedforward compensation based on a dynamic
model of the AMB system and showed that
increases in the vibration rejection can be achieved.
In practice, however, a dynamic model is not
reliably accurate, because of many problems
associated with it, such as the non-linearity of AMB,
approximation errors of the discrete equivalent to a
continuous transfer function, and sensor dynamics.
Motivated to overcome these problems, in this
work an alternative technique is proposed: a non-
model based acceleration feedforward compensation
control developed from an adaptive estimation, by
means of the multiple filtered-x least mean square
264
Kang M. and Lyou J. (2004).
A DISTURBANCE COMPENSATION CONTROL FOR AN ACTIVE MAGNETIC BEARING SYSTEM BY A MULTIPLE FXLMS ALGORITHM.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 264-269
DOI: 10.5220/0001135102640269
Copyright
c
SciTePress

(MFXLMS) algorithm (Kuo, 1996; White, 1997).
The performance and the effectiveness of the
proposed technique are demonstrated on a 2-DOF
AMB system subject to base motion.
2 SYSTEM MODEL
The test rig used in this paper is an AMB system of
2-DOF shown in Fig. 1. Figure 2 is the photograph
of the test rig. The test rig consists of two sets of
AMB(left AMB: AMB-1, right AMB:AMB-2) and a
circular shaft. Each end of the shaft is tied up by
string wire such that the shaft moves only in the
vertical plane. Each electromagnet is attached rigidly
to each shaker(B&K-4808), which generates base
motion resembling the vehicle motion. Two non-
contacting proximity displacement sensors(AEC-
5505) measure each air gap between the probe tip
and the shaft surface, and the vertical acceleration of
each electromagnet is measured by each
accelerometer(Crossbow, CX04LP1Z).
Displacement
Sensor
Accelerometer
Shaker 2
Shaker 1
- I
1
iI
o
+
1
iI
o
−
2
iI
o
−
2
iI
o
+
Figure 1: Schematic diagram of test rig
From the free-body diagram of the system in Fig.
3, the equation of motion is given by
1212 1212
2
1212 1212
1
2
4
4
1
1
2
yyzz yyzz
mJ
yyzz yyzz
a
f
mg
f
+++ −+−+
⎧⎫⎧
−
⎨⎬⎨
+++ −+−
⎩⎭⎩
⎧⎫
⎧⎫
+=
⎨⎬ ⎨ ⎬
⎩⎭
⎩⎭
⎫
⎬
⎭
(1)
where m and J are the mass and the mass moment of
inertia about the mass center of the shaft.
, and
y z
f
mean the air gap, the vertical acceleration and the
actuating force, respectively. The subscripts 1 and 2
denote the positions of the AMB-1 and the AMB-2,
respectively. This definition is consistent hereafter.
Figure 2: Photograph of test rig
z
1
z
2
y
1
y
2
f
1
f
2
a
a
J
Figure 3: Free-body diagram of the levitated axis
The magnetic attractive force is approximately
proportional to the square of the coil current and
inversely proportional to the square of gap. However
the nonlinearity of the magnetic attractive force
against the coil current is decreased with the bias
current added to the coil current. Consequently the
linearized model is given by
cd ic
f
Ky Ki
=
+
(2)
where
y
is the displacement stiffness and is
the current stiffness.
K
i
K
Since the time constant of the power amplifier-
magnet coil can be designed to be small enough by
current feedback control, the control current
c
i can
be assumed to be proportional to the applied voltage,
, to the amplifier, i.e.
c
u
ca
iKu
c
=
(3)
where
is the gain of the amplifier.
a
Substituting eqs. (2) and (3) into eq. (1) gives the
linearized AMB system model as follows:
K
22
12
11
22
22
12
22
1211
22
22
12
()()
1
()()
()()
()()
dd
dd
ii
a
ii
K J ma K J ma
yy
yy
mJ
KJmaKJma
K J ma K J ma u z g
K
uzg
mJ
KJma KJma
⎡⎤
+−
⎧⎫ ⎧⎫
⎢⎥
−
⎨⎬ ⎨⎬
⎢⎥
−+
⎩⎭ ⎩⎭
⎣⎦
⎡⎤
+−
⎧⎫⎧ ⎫
⎢⎥
=−
⎨⎬⎨ ⎬
+
⎢⎥
−+
⎩⎭⎩ ⎭
⎣⎦
+
(4)
A DISTURBANCE COMPENSATION CONTROL FOR AN ACTIVE MAGNETIC BEARING SYSTEM BY A
MULTIPLE FXLMS ALGORITHM
265

It is clear from eq.(4) that the system is open-
loop unstable, and the base acceleration and the
gravitational force disturb the system.
3 CONTROLLER DESIGN
The system model in eq. (4) can be represented by
the state space equation as
ga
fdBuAqq −−+=
(5)
{}
1212
T
qyyyy=
,
{
}
T
uuu
21
=
12
00
T
a
dzz=
⎡⎤
⎣⎦
,
00
T
g
f
gg=
⎡
⎤
⎣
⎦
(6)
Since this system has no integrator, the state
feedback control with integral is applied to eliminate
the steady state error due to the gravity force.
η
i
kKqu −−= (7)
where K and
i
k are the state feedback gain vectors,
and
η
is the integration of y
1
and y
2
, i.e.,
.
{}
12
T
yy
η
=
The feedback gains in eq.(7) can be design from
various kinds of schemes. The closed-loop system
stabilized by eq. (7) can be represented in discrete
time domain as
111
11111122
11
11112 2
111
22211222
11
21 1 22 2
()() ()() ()()
()() ()()
( ) () ( ) () ( ) ()
()() ()()
A
qykBqukBquk
Cq dkCq dk
A
qykBqukBquk
CqdkCqdk
−−−
−−
−−−
−−
=+
++
=+
++
(8)
where variables with the index k mean the sampled
variables.
1
()
i
A
q
−
,
1
(
ij
)
B
q
−
and are the
system polynomials.
is the one step delay
operator.
1
()
ij
Cq
−
1−
q
A general compensator for the system in eq.(8) is
defined by
11
1111 122
11
2211222
() ( ) () ( ) ()
() ()() ()()
uk W q dk W q d k
uk W q dk W q dk
−−
−−
=+
=+
(9)
Applying the compensator, eq.(9), to the system,
eq.(8), yields the compensated system of the form
1 1 11 11 12 21 11 1
11 12 12 22 12 2
() ()
()
A
yk BW BW C dk
BW BW C d k
=++
⎡⎤
⎣⎦
+++
⎡⎤
⎣⎦
2 2 21 11 22 21 21 1
21 12 22 22 22 2
() ()
()
A
yk BW BW C dk
BW BW C d k
=++
⎡⎤
⎣⎦
+++
⎡⎤
⎣⎦
(10)
Obviously, the perfect disturbance cancelling
compensators
, , , are derived from
*
11
W
*
21
W
*
12
W
*
22
W
*
11
*
21
*
12
*
22
W
W
W
W
⎧
⎫
⎪
⎪
⎪
⎪
⎪
⎪
=
⎨
⎬
⎪
⎪
⎪
⎪
⎪
⎪
⎩⎭
22 11 12 21
21 11 11 21
22 12 12 22
11 22 12 21
21 12 11 22
1
BC BC
BC BC
BC BC
BB BB
BC BC
−
⎧
⎫
⎪
⎪
−+
⎪
⎪
⎨
⎬
−
−
⎪
⎪
⎪
⎪
−+
⎩⎭
(11)
Since the compensators given in eq.(11) are
designed from the system model, the compensation
performance should be sensitive to the accuracy of
the model. In practice, however, this kind of perfect
cancelling based on the model is not expected
because of the problems such as inaccuracy of
dynamic model, approximation error of a discrete
equivalent to a continuous transfer function, and
sensor dynamics. Motivated by these problems, an
explicit optimal feedforward compensator design
technique is proposed in this paper. By this
technique, the feedforward compensator design can
be separated into two parts.
1) Disturbance cancelling control for single
harmonic base motion
It is clear from eq. (11) that the response to a
harmonic base motion of the frequency
r
ω
can be
exactly nullified by choosing the polynomial
1
()
ij
Wq
−
as the first order polynomial satisfying the
relation
121 *
,, 1,2
jw T jw T
rr
ij ij ij ij
qe qe
Wwwq W ij
−
==
⎡⎤
=+ = =
⎣⎦
(12)
where is the sampling interval.
T
Nullifying disturbance response by using
feedforward compensator means physically
matching the impedance from the base motion to the
air-gap with the impedances from the base motions
to the air-gaps through the AMB dynamics and of
the feedforward compensators, so that the
disturbance can be perfectly cancelled. However
compensator design from the model is not suitable
for practical applications. To get rid of the problems
associated with the inaccurate model, adaptation of
the feedforward compensator is proposed. This
technique is an explicit design through experiments
by using a multiple-FXLMS algorithm. The FXLMS
algorithm has been extensively used in the field of
active noise control(Kuo, 1996; Widrow and Stearns,
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
266

1985)). Figure 4 shows an example of the multiple-
FXLMS algorithm to estimate the compensator
polynomial
. The parameters of the
compensators are estimated from the following
update equation.
*
11
W
Figure 4: MFLMS algorithm for estimating
)(
1
11
−
qW
1
11
1
1
22
1
2
2
2
2
22
ˆ
()
ˆ
(1) ()
(1)
()
()
(1) ()
ˆ
()
ˆ
(1)
()
()
ˆ
ˆˆ ˆ
() () ( 1), () (),,, 1
ˆ
j
i
j
ij ij
i
ij
j
ij ij
i
j
i
j
i
ij
j
i
ij
mm m m
ij ij ij ij m
i
dk
wk wk
dk
yk
Dk
wk wk
dk
dk
yk
Dk
B
Dkdk dk dk dkijm
A
µ
η
⎧⎫
⎪⎪
⎨⎬
⎧⎫⎧⎫
⎪⎪
+
−
⎪⎪⎪⎪
⎩⎭
=+
⎨⎬⎨⎬
⎪⎪⎪⎪
+
⎩⎭⎩⎭
⎧⎫
⎪⎪
⎨⎬
⎪⎪
−
⎩⎭
+
=+− = =,2
(13)
where
ij
µ
and
ij
η
are the update gains,
1
ˆ
(
i
)
A
q
−
and
1
ˆ
(
ij
)
B
q
−
are the estimated system polynomials. All
the compensator polynomials are estimated
simultaneously from eq. (13).
By applying the MFXLMS algorithm meanwhile
the exciters generate a stationary single harmonic
base motion, the control parameters
and in
eq. (13) are estimated.
1
ij
w
2
ij
w
Since the base motion is single harmonic of
frequency
r
ω
, the Fourier transforms
1
(
r
)
D
j
ω
and
2
(
r
)
D
j
ω
of and , respectively, would yield the
relation
12r
1
d
2
d
() (
r
)
D
jDj
ω
αω
=
, where
α
is a complex
number which represents the magnitude and phase
relations between
1
d
and
2
. The estimated
polynomials are not unique but satisfy two
independent relations in the following
d
**
11 12 11 12 1
**
2
21 22
21 22
ˆˆ
ˆˆ
WW WW
WW
WW
β
αα
β
⎧⎫⎧⎫
⎧⎫⎧⎫
⎧⎫
⎪⎪⎪⎪ ⎪⎪⎪⎪
+= +=
⎨⎬⎨⎬ ⎨⎬⎨⎬⎨
⎩⎭
⎪⎪⎪⎪
⎪⎪⎪⎪
⎩⎭⎩⎭
⎩⎭⎩⎭
⎬
(14)
Thus it is necessary to have at least two sets of
polynomials estimated from the experiments where
1
and
2
have the same frequency but have
different relations. For example, if a set of
polynomials is estimated from the experiment where
1
d d
α
α
=
then one can determine
1
β
and
2
β
from
eq.(14) as
1
11 12 1
1
1
2
21 22
ˆˆ
ˆˆ
WW
WW
β
α
β
⎧⎫⎧⎫
⎧
⎫
⎪
⎪⎪ ⎪⎪ ⎪
+=
⎨
⎬⎨ ⎬⎨ ⎬
⎪
⎪⎪ ⎪⎪ ⎪
⎩⎭
⎩⎭⎩⎭
(15)
1
11
ˆ
ˆ
A
B
2
21
ˆ
ˆ
A
B
MFXLMS
)(
1
ky
)(
2
ky
)(
11
ku
)(
ˆ
1
11
kd
)(
ˆ
1
21
kd
12
11
1
11
1
11
)(
ˆ
−−
+= qwwqW
1
() sin
r
dk M k T
ω
=
Similarly, from another set of estimated
polynomials obtained from another experiment
where
21
α
αα
=
≠
,
1
β
and
2
β
are obtained as
2
11 12 1
2
2
2
21 22
ˆˆ
ˆˆ
WW
WW
β
α
β
⎧⎫⎧⎫
⎧
⎫
⎪
⎪⎪ ⎪⎪ ⎪
+=
⎨
⎬⎨ ⎬⎨ ⎬
⎪
⎪⎪ ⎪⎪ ⎪
⎩⎭
⎩⎭⎩⎭
(16)
From eqns. (14)-(16), the compensator
polynomials that perfectly cancel any stationary
harmonic base disturbance of the specified
frequency
r
ω
can be determined as
*1
1
11 1
1
*1
21 1 2
*
2
12 1
*2
2
22 2
010
001
010
001
W
W
W
W
2
β
α
α
β
α
β
α
β
−
⎧
⎫⎧
⎡⎤
⎫
⎪
⎪⎪
⎢⎥
⎪
⎪
⎪⎪⎪
⎪
⎪
⎢⎥
=
⎪⎪
⎨
⎬
⎢⎥
⎨⎬
⎪
⎪⎪
⎢⎥
⎪
⎪
⎪⎪
⎢⎥
⎣⎦
⎪
⎪
⎪⎪
⎩⎭ ⎩⎭
⎪
j
=
(17)
Repeating the above experimental procedures by
changing the base motion frequency, sets of perfect
cancelling compensator polynomials for each
frequency are obtained.
2) Model fitting in frequency domain
From the sets of compensator parameters for each
specified frequency, the FRF(frequency response
function) of the disturbance cancelling feedforward
compensators can be calculated. Based on this FRF,
the compensators in eq. (9) are determined so as to
minimize the cost function J
()
2
*1 1
1
ˆ
() () ,,1,2
jT
k
n
ij ij k ij ij
qe
k
JWqWqi
ω
λω
−−
=
=
⎡⎤
=−
⎢⎥
⎣⎦
∑
(18)
where
lm k
()
λ
ω
Wq
is the frequency weighting and
lm
*1
ˆ
()
−
is the estimated compensator obtained in
the first step and
lm
Wq
1
()
−
is the compensator to be
determined. To avoid unstable compensator,
lm
1
()Wq
−
can have the form of FIR(finite impulse
response) filter.
A DISTURBANCE COMPENSATION CONTROL FOR AN ACTIVE MAGNETIC BEARING SYSTEM BY A
MULTIPLE FXLMS ALGORITHM
267

4 EXPERIMENTS
To verify the effectiveness of the proposed control
scheme, experiments were conducted using the test
apparatus shown in Fig. 2. All control algorithms
were implemented on a digital computer equipped
with a DSP(TI-DS-1104)) board. Throughout the
experiments, the sampling frequency was kept at
2000Hz.
A pole placement feedback (FB) control was
designed to have a closed-loop system with a
damping ratio of
8.0=
ς
and natural frequency of
80
n
H
z
ω
=
in consideration of the spectral
characteristics of the base motion. The vehicle
motion is characterized by a band-limited random
process of bandwidth 15Hz-60Hz.
To evaluate the convergence of the estimated
compensator parameters and the corresponding
disturbance rejection performance, a sequence of
simple harmonic of frequency 30Hz was delivered to
the shakers. The resultant base motion kept the
relation
12
( ) 1.023 ( )
D
jDj
ω
ω
=
.
Figs. 5 and 6 show the estimated compensator
parameters of
11
W
and the corresponding air-gap
responses, respectively. We confirmed that all
estimated parameters converged to their final values
after 50 s. These figures reveal that the air-gap
responses were consequently reduced, as the
estimated parameters converged to their final values.
The aforementioned convergence property and the
disturbance rejection performance exhibit the
feasibility of the proposed compensation control by
means of the MFXLMS algorithm.
ˆ
As explained in the above, at least, one more set
of compensator parameters is necessary to determine
the unique compensator polynomials which cancel
the disturbance responses perfectly at
30
f
Hz
=
.
The MFXLMS algorithm was applied to obtain
another set of compensator parameters under the
different base motion profile kept the relation
12
/2
( ) 1.465 ( )
j
D
jeDj
π
ω
ω
=
,
30
f
Hz=
. Similar
convergence and disturbance rejection properties to
Figs. 6 and 7 were confirmed.
From the two sets of the parameters obtained, the
FRF of the disturbance neutralizing compensator at
30
f
Hz=
was determined. The disturbance rejection
performance of this compensator was evaluated
under the base motion yielding the relation
/4
12
()0.69 ()
j
D
jeD
π
j
ω
ω
−
= ,30
f
Hz=
.
Fig. 7 shows the air-gap responses of the FB-
control by itself and the FB with the compensation
control. Fig. 7 reveals that the compensation control
can almost neutralize any base motion responses of
frequency 30Hz. Surprisingly, it was found that the
control effort is reduced when the compensation was
employed. The air-gap responses that remained after
employing the compensation came mainly from the
inability of the shakers to produce a pure sinusoidal
tone of motion.
Repeating the experiment, while changing the
harmonic base motion frequency, sets of disturbance
neutralizing compensator parameters for each
frequency were obtained. The FRF
11
W
calculated
from the estimated parameters is shown as an
example in Fig. 8. Based on the FRF in Fig. 8, the
best-fit compensator was determined to be the third-
order polynomials.
ˆ
0 5 10 15 20 25 30
-5
-4
-3
-2
-1
0
1
2
3
4
Figure 5: Estimated coefficients of
W
.
)(
1
11
−
q
02468101214
-100
-50
0
50
100
f = 30 Hz
Time [sec]
02468101214
-200
-150
-100
-50
0
f = 30 Hz
Air gap of y
1
[µm]
Air gap of y
2
[µm]
Time [sec]
Figure 6: Air-gap responses during estimation by
MFXLMS algorithm
Figure 7: Compensated air gap responses
To investigate the efficiency of the designed
compensator, a comparison was made between the
air-gap response with the compensation and without
the compensation. During the control experiments, a
sequence of band-limited random signals of
bandwidth 15-60Hz was delivered to the shaker and
the resultant base motion resembled that of the real
vehicle.
As shown in Fig. 9, the air-gap responses were
greatly reduced by applying the feedforward
W
112
W
111
Updated parameters W
111
and W
112
Time [s]
0.0 0.5 1.0 1.5 2.0
-100
-50
0
50
W/ Conpensation
W/O Conpensation
Air Gap y
1
[µm]
Time [sec]
0.0 0.5 1.0 1.5 2.0
-200
-150
-100
-50
W/ Conpensation
W/O Conpensation
Air Gap y
2
[µm]
Time [sec]
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
268
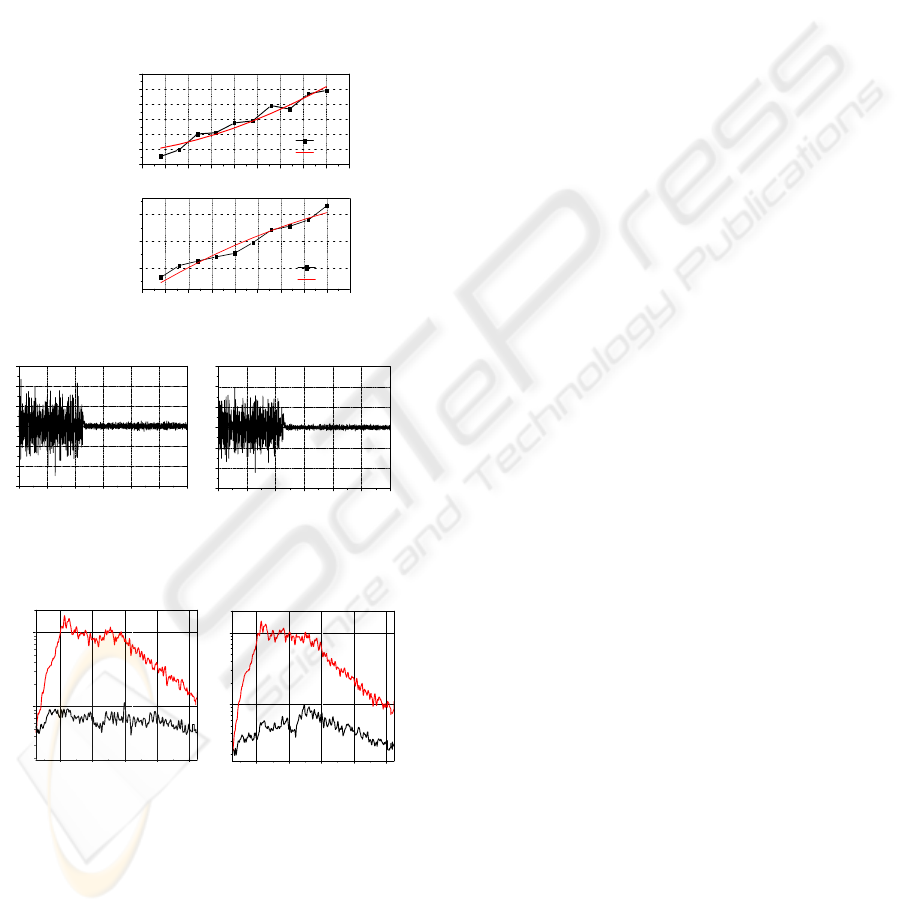
compensation. For y
1,
the standard deviations of the
air-gap with compensation and without
compensation were calculated to be
m
µ
σ
53.14=
and
m
µ
43.1
, respectively. For y
2,
the standard deviations
of the air-gap with compensation and without
compensation were calculated to be
m
µ
σ
13.13=
and
m
µ
08.1
, respectively. The control voltages were
slightly reduced after employing compensation.
Figure 10 shows the spectra of the air-gap responses
in Fig. 9. The disturbance attenuation ratio is
approximately–20db within the frequency band of
the base motion.
Figure 8: Measured and fitted FRF of
11
ˆ
W
Figure 9: Air-gap responses w/ and w/o compensation
20 40 60 80 100
10
-3
10
-2
Compensated
Uncompensated
Spectrum of y
1
Frequency [Hz]
20 40 60 80 100
10
-3
10
-2
Uncompensated
Compensated
Spectrum of y
2
Frequency [Hz]
Figure 10: Spectra of air-gap with and without
compensation
5 CONCLUSION
In this work, an experimental feedforward
compensator design technique, developed from an
adaptive estimation by means of the Multiple
Filtered-x least mean square (MFXLMS) algorithm
has been proposed. The feasibility of the proposed
technique has been verified by an experimental
study, by using a 2-DOF active magnetic bearing
system subject to base motion. The experimental
results showed that the standard deviation of the
compensated response was reduced to less than 10%
of that by feedback control alone.
ACKNOWLEDGEMENT
This work was supported by grant no.( R01-2003-
000-10857-0) from the Basic Research Program of
the Korea Science & Engineering Foundation.
10 15 20 25 30 35 40 45 50 55
-160
-150
-140
measured
fitted
Phase angle [degree]
Frequency [Hz]
10 15 20 25 30 35 40 45 50 55
0.45
0.50
0.55
0.60
0.65
0.70
0.75
measured
fitted
Magnitude
Frequency [Hz]
REFERENCES
Brunet, M., 1998. Practical Applications of Active
Magnetic Bearing to the Industrial World. 1’st
International Symposium on Magnetic Bearing. Zurich,
pp.225-244.
Cole, M. O. T., Keogh, P. S. and Burrows, C. R. , 1998.
Control and Non-linear Compensation of a
Rotor/Magnetic Bearing System Subject to base
Motion. 6th Int. Symposium on Magnetic Bearings.
Cambridge, MA, pp.618-627.
3456789
-60
-40
-20
0
20
40
60
Air gap y
1
[µm]
W/ compensation
W/O compensation
Time [s]
3456789
-60
-40
-20
0
20
40
60
Air gap y
2
[µm]
W/ compensation
W/O compensation
Time [s]
Jinzenji, A., Sasamoto, T., Aikawa, K., Yoshida, S. and
Aruga, K., 2001. Acceleration feedforward control
Against Rotational Disturbance in hard Disk Drives.
IEEE Trans. On Magnetics. Vol.37, No.2, pp.888-893,.
Kasada, M.E., Clements, J., Wicks, A. L., Hall, C. D., and
Kirk, R. G., 2000, Effect of sinusoidal base motion on
a magnetic bearing, Proc. IEEE International
Conference on Control Applications, pp.144-149.
Kuo, S. M. and Morgan, D. R., 1996. Active Noise Control
Systems. A Wiley-Interscience Publication, John Wiley
Sons, Inc.
Suzuki, Y., 1998. Acceleration Feedforward Control for
Active Magnetic Bearing Excited by Ground Motion.
IEEE Proc. Control Theory Appl. Vol.145, pp. 113-118.
Wang, A.K. and Ren, W., 1999, Convergence analysis of
the multiple-variable filtered-x LMS algorithm with
application to active noise control, IEEE Trans. On
Signal Processing, Vol.47, No.4, pp.1166-1169.
White, M. T. and Tomizuka, M., 1997. Increased
Disturbance Rejection in Magnetic Disk Drives by
Acceleration Feedforward Control and Parameter
Adaptation. Control Engineering Practice. vol.5, no.6.,
pp.741-751.
Widrow, B. and Stearns, S. D., 1985. Adaptive Signal
Processing. Prentice Hall. Englewood Cliffs, NJ.
A DISTURBANCE COMPENSATION CONTROL FOR AN ACTIVE MAGNETIC BEARING SYSTEM BY A
MULTIPLE FXLMS ALGORITHM
269
