
HEXAPOD STRUCTURE EVALUATION AS WEB SERVICE
Leonardo Jelenković, Domagoj Jakobović, Leo Budin
Faculty of Electrical Engineering and Computing, University of Zagreb, Croatia
Keywords: Stewart platform, workspace, error analysis, kinematic parameters, forward kinematics, web services
Abstract: This paper describes several methods for evaluation of kinematic parameters of a Stewart platform. One of
those methods is the calculation of workspace area both in numerical and graphical form. The second
method allows us to analyze and estimate inherent mechanism errors that occur due to actuator errors,
elastic and thermal deformations and other error sources. Furthermore, another procedure is presented which
calculates certain kinematic parameters throughout the workspace area of the model and outputs them as
numerical and graphical data. Finally, a forward kinematics algorithm designed for use in real-time
conditions and its adaptation is presented. The described algorithms are implemented and made available as
web services on the project web site (http://hexapod.zemris.fer.hr/).
1 INTRODUCTION
Parallel kinematic manipulators (PKMs) have been
rediscovered in the last decade as microprocessor's
power finally satisfies computing force required for
their control. Their great payload capacity, stiffness
and accuracy characteristic as result of their parallel
structure make them superior to serial manipulators
in many fields.
One of the most accepted PKMs is Stewart
platform based manipulator, also known as hexapod
or Gough platform. Hexapod, originally, consists of
two platforms, one fixed on the floor or ceiling and
one mobile, connected together via six extensible
struts with spherical or other types of joints. That
construction gives mobile platform 6-DOF (degrees
of freedom). Hexapod movement and control is
achieved only through strut lengths changes. One
variation to this structure, also observed here, is
when struts are fixed in length but one of their ends
is placed on a guideway. Control is then obtained
only by moving the joints positioned on guideways.
Although in this model the forces acting on struts are
not just along the axis of the strut, as in the original
design, practically attainable sliding characteristics
of guideways make it a very considerable structure
for manipulators.
One of the qualities we want from a manipulator
is its good kinematics behavior. The kinematic
characteristics have direct impact on manipulability
and working speed of a manipulator. In this paper
we present several methods for calculating various
kinematic parameters of Stewart platform. These
methods can be used to optimize hexapod structure
for better kinematic characteristics or combined with
other procedures were kinematic can be just one
measure in optimization process.
The forward kinematic (Merlet, 1993) of a
parallel manipulator is the problem of finding the
position and orientation of the mobile platform when
the strut lengths are known. This problem has no
known closed form solution for the most general 6-6
form of hexapod manipulator (with six joints on the
base and six on the mobile platform). In this paper
we present a method for numerical solving of
forward kinematics, which is derived from our
previous work where several mathematical
representations of the forward kinematic problem, in
the form of optimization functions, were combined
with various optimization algorithms and adaptation
methods in order to find an efficient procedure that
would allow for precise forward kinematic solving
in real-time conditions.
2 THE INVERSE KINEMATICS
PROBLEM
The inverse kinematics problem compared to
forward kinematics is almost trivial for parallel
manipulator such as hexapod. Inverse kinematics
will be presented here for two different hexapod
492
Jelenkovi
´
c L., Jakobovi
´
c D. and Budin L. (2004).
HEXAPOD STRUCTURE EVALUATION AS WEB SERVICE.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 492-497
DOI: 10.5220/0001136504920497
Copyright
c
SciTePress
structures: standard Stewart platform based
manipulator as shown in Figure 1 and hexapod
shown on Figure 2.
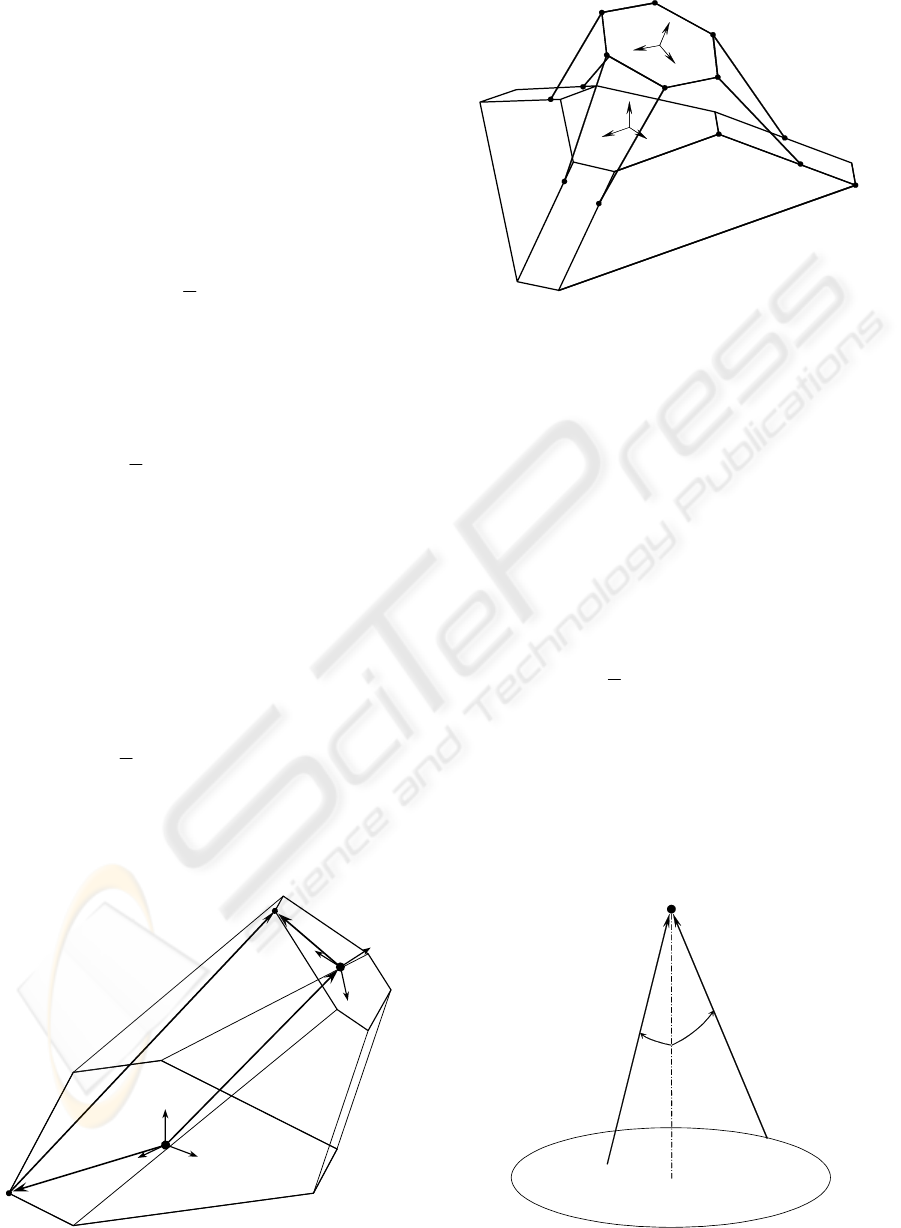
Standard Stewart Platform based manipulator as
shown in Figure 1 can be defined with: minimal and
maximal struts length (l
min
, l
max
), radii of fixed and
mobile platforms (r
1
, r
2
), joint placement defined
with angle between closest joints for both platforms
(
α
,
β
) and joint moving area (assuming cone with
angle
γ
).
Inverse kinematics can be described with
equations:
()
,,
,
iii
i
P
i
BAdq
aRrA
r
r
r
r
r
=
⋅+=
(1)
(2)
where
i
A
r
and
i
B
r
are joint position vectors on
base and mobile platform,
i
a
r
are joint position
vectors of mobile platform,
i
P
a
r
are joint position
vectors in local coordinate system of mobile
platform,
r
r
is translation vector between base and
mobile systems,
R is orientation matrix of mobile
platform, d() is distance funtion and
i
q are strut
lengths calculated with inverse kinematics.
The second observed hexapod model, shown in
Figure 1, differs from standard Stewart manipulator
at base platform and struts. Strut lengths are constant
but their joints on one side are placed on sliding
guide-ways where actuators are placed. Parameters
which describe this model differ only for base
platform:
ik
B
,
r
and
ip
B
,
r
define i
th
guide way and s
i
as value between [0, 1] identify actual joint position.
Inverse kinematics for this model can be defined
using equations:
()
()
.
,,,
,,, ipikiipi
iii
P
i
BBsBB
BAdlaRrA
rrrr
r
r
r
r
r
−⋅+=
=⋅+=
(3)
Values s
i
are calculated from quadratic equation
and therefore can give two possible joint positions
on same guide way. This problem must be solved in
control procedures.
i
A
r
ii
wq
r
⋅
r
r
i
a
r
m
O
i
B
r
i
b
r
O
Figure 1: Stewart Platform manipulator
ip
B
,
r
ik
B
,
r
i
A
r
i
B
r
O
O
m
Figure 2: Hexapod with fixed strut lengths
End effector (tool) is placed on mobile platform
above the geometrical center of joints placed on that
platform by height l
tool
. Therefore, origin of local
coordinate system of mobile platform is placed in
that point. Subsequently vectors
i
a
r
and
i
P
a
r
are
calculated for that origin.
In our work inverse kinematics is used for
calculating three hexapod characteristics: workspace
volume, error study and kinematics evaluation.
3 WORKSPACE CALCULATION
For given end effector (tool) position and
orientation, defined with translation vector
r
r
and
rotation matrix
R , joint positions on mobile
platform
i
A
r
can be calculated. Using inverse
kinematics strut lengths
i
q and directions
i
w
r
can be
calculated for first model, and joint positions
i
s and
directions
i
w
r
, for second model. With these values
it is possible to check if hexapod is able to put its
mobile platform to required position verifying
several constraints.
Firstly, strut lengths must be within given ranges
for first model or joints must lay on guide ways for
second model.
P
r
ϑ
max
ϑ
L
r
s
r
Figure 3: Orientations used in calculations
HEXAPOD STRUCTURE EVALUATION AS WEB SERVICE
493

Secondly, joint constraints must be met.
Spherical joints are used in modeling and its
restrictions checked.
The third and the last constraints which are
checked are struts collisions. Since struts have some
thickness it is possible that collisions between any
two struts occur. For second hexapod model strut
collisions with base platform are also checked.
If all constraint for given end effector are
satisfied then given position is reachable. With a
fixed end effector orientation a predefined volume
can be checked and workspace with given
orientation found.
Assuming that manipulator is used for
machining free surface items, working area can be
better defined as area were manipulator can work for
(almost) any required orientation. Required
orientations which give optimal surface
characteristics are normals to surface itself. Usually
they can be defined with vectors within a cone with
defined angle as shown in Figure 3. Working area
calculated using this definition gives superior visual
and numeric description of manipulator. For
performance reasons such cone is approximated with
a dozen vectors for each of several different angles
ϑ
smaller than or equal to
ϑ
max
. In this way the result
isn’t just twofold, and if point isn’t a part of
workspace, information for which
ϑ
max
it will
eventually be can still be obtained.
Using the described methods, workspace area for
first and second hexapod model can be calculated.
Detailed description can be found in (Jakobović,
2002).
4 ERROR ANALYSIS
Control of hexapod manipulator is based on inverse
kinematics. However, that was valid only for
models. In reality there must be a feedback through
some kind of sensors that measure actual strut
lengths and end-effector position. Because of
unpredictable environment some hexapod elements
may have values different from nominal. This can be
due to the assembly errors, elastic and thermal
deformations, actuator errors and others error
sources (Wang, 1995). Model that includes all
sources of errors is hardly possible to implement
because of nonlinear dependent error sources and
most of error elements can’t even be calculated or
measured. What is shown in this paper is to give an
approximate value for error at end effector if error
sources are given as approximate values
(tolerances), just quantities, not directions.
From Figure 1, for one vector chain through i
th
strut, the following equation can be deducted:
i
P
iii
aRrwqb
r
r
r
v
⋅+=⋅+
.
(4)
Differentiating this equation yields:
i
P
i
P
iiiii
aRaRrwqwqb
rr
r
r
r
r
δδδδδδ
⋅+⋅+=⋅+⋅+
,
(5)
which can be interpreted as relations between
errors in joint positions
i
P
i
ab
r
r
δδ
,
and actuator errors
i
q
δ
with errors at end effector position r
r
δ
and
orientation
R
δ
. Furthermore, two more error
elements are added to (5), errors in joint centre
position (Patel, 1997), both on mobile and fixed
platform:
()
.
i
P
i
P
i
P
iiiiii
daRaRr
wqwqcb
r
rrr
r
r
r
r
+⋅+⋅+
=⋅+⋅++
δδδ
δδδ
(6)
Multiplying (6) with
T
i
w
r
, than replacing
RR ⋅Ω=
~
δδ
, where Ω
r
δ
is orientation error vector,
and with simple vector and mathematics
transformations (6) becomes (7).
(
)
()()
iiii
P
i
P
i
iiii
cbwdaRw
wawrq
r
r
r
r
rr
r
r
r
r
r
+⋅−+⋅⋅+
+×⋅Ω+⋅=
δδ
δδδ
(7)
Equation (7) can be generalized and used in
matrix form:
()
,
,
1
ANJ
ANJ
r
r
r
r
r
r
δδδ
δδδ
⋅−Λ⋅=Π
⋅+Π⋅=Λ
−
(8)
where
[
]
T
qqq
621
...
δδδδ
=Λ
r
,
(9)
[
]
[
]
T
zyxzyx
T
TT
rrrr
ωωωδδδδδδ
=Ω=Π
r
r
r
,
(10)
()
()
,
66
66
11
11
666
111
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
+
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
×
×
=
cb
da
cb
da
A
waw
waw
J
PP
PP
T
T
T
T
r
r
r
r
M
r
r
r
r
r
rrr
MM
rrr
δ
δ
δ
δ
δ
(11)
.
00
00
66
11
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−⋅
−⋅
=
TTTT
TTTT
wRw
wRw
N
rr
L
rr
MMOMM
r
r
L
r
r
(12)
With formula (8) error in position and
orientation at end effector can be calculated if all
errors are known or at least presumed.
Formulas for the second hexapod model can be
achieved following the same procedure, thus
yielding formulas (13) to (16).
()
BANSJ
BANJS
r
r
r
r
r
r
r
r
−⋅−Ψ⋅⋅=Π
+⋅+Π⋅=Ψ⋅
−
δδδ
δδδ
1
(13)
Equation (13) is an equivalent for (8) for model
with fixed strut lengths. But exact values for each
error element must be known to calculate errors at
end effector.
ICINCO 2004 - ROBOTICS AND AUTOMATION
494

()
()
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
×
×
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=Ψ
T
T
T
T
waw
waw
J
s
s
666
111
6
1
rrr
MM
rrr
M
r
δ
δ
δ
(14)
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⋅
⋅
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⋅
⋅
=
66
11
6
1
0
0
0
0
lw
lw
S
Rw
Rw
N
TT
TT
TT
TT
r
r
L
r
MOM
r
L
r
r
r
L
r
MOM
r
L
r
(15)
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⋅+
⋅+
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
+
+
=
666
111
66
11
cwq
cwq
B
da
da
A
PP
PP
rr
M
rr
r
r
r
M
r
r
r
δ
δ
δ
δ
δ
δ
(16)
What can be done if errors can be only
approximated with some border values? Using worst
case method and formulas (8) or (13) a maximal
error can be found searching through all possible
input error values. This method is used in analysis.
Because of large search space an approximate
iterative numerical method very similar to
coordinate axis search is used to find global
maximum.
5 KINEMATIC ANALYSIS
For kinematics evaluation, the relation between
actuators speed and end effector speed is required.
Observing one vector chain through i
th
strut for the
first model, the following equation can be written:
iiii
arwqb
r
r
r
v
+=⋅+
(17)
Since
i
w
r
is unity vector and
0/
r
r
=∂∂ rb
i
derivation of eq. (17) yields eq. (18), where
v
r
and
ω
r
are linear and angular end effector velocities.
iiiii
avwqwq
r
r
r
r
r
r
&
×+
=
×⋅+⋅
ω
ω
(18)
Eq. (18) can be easily transformed in form of eq.
(19) and then finally in matrix form as on eq. (20).
This is a final kinematics equation, where relation
between end effector velocity and actuator velocity -
strut lengths changes, is given.
()
iiii
wawvq
r
r
r
r
r
&
⋅×+⋅=
ω
(19)
()
()
xJq
v
waw
waw
q
TT
TT
&
r
r
&
r
r
rrr
MM
r
r
r
r
&
⋅=⇔
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
×
×
=
ω
666
111
(20)
For second model shown on Figure 2, for one
vector chain through i
th
strut, the following equation
can be deducted:
iiiii
arwqlsb
rrr
rr
+=⋅+⋅+
(21)
Derivation of eq. (21) yields eq. (22), and with
little more mathematical operations we get
kinematics equation (23) very similar to first
hexapod model.
iiii
avwqls
rr
r
rr
r
&
×+=×⋅+⋅
ωω
(22)
()
()
xJxKLsxKsL
v
waw
waw
s
s
lw
lw
TT
TT
&
r
&
r
r
&
&
r
r
&
r
r
rrr
MM
rr
r
&
M
&
r
r
L
MOM
L
r
r
⋅=⋅⋅=⇒⋅=⋅
⎥
⎦
⎤
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
×
×
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⋅
⋅
−1
666
111
6
1
66
11
0
0
ω
(23)
As equations (20) and (23) show, relation
between end effector velocities and strut changes is
given by a matrix commonly called jacobian.
Kinematics characteristics must therefore be
extracted from that matrix. Commonly used values
for kinematics evaluation of manipulator are
singular values of jacobian (Stoughton, 1993,
Pittens, 1993, Huang, 1998).
Three parameters based on singular values are
usually used for kinematics evaluation:
1.
condition number:
κ
=
σ
max
/
σ
min
2.
minimal singular value:
σ
min
3.
manipulability: |det(
′
−1
J )|=Π
σ
i
.
Proposed method used to evaluate manipulator
from a kinematic aspect is to calculate those three
parameters through whole workspace of the
manipulator or just in some part of it. For every
point where calculations are to be performed, those
three parameters are calculated not only for one end
effector orientation but for all orientations as shown
on Figure 3. The value for particular kinematics
parameter is then calculated as average value.
6 FORWARD KINEMATICS
In our work we have combined several mathematical
representations of the forward kinematics problem
with various optimization algorithms. The
algorithms applied in this work were Powell's
method, Hooke-Jeeves', steepest descent search,
Newton-Raphson's (NR) method, NR method with
constant Jacobian and Fletcher-Powell algorithm.
Solving of forward kinematic was simulated in
static and dynamic conditions. The goal was to find
the combination which would yield the best results
considering the convergence, speed and accuracy.
The most promising combinations were tested in
dynamic conditions, where the algorithm had to
track a preset trajectory of the mobile platform with
as small error and as large sampling frequency as
possible. The most successful combination was
Newton-Raphson's algorithm applied to canonical
representaion of the problem, of which more
information can be found in (Jakobović, 2002) and
(Dasgupta, 1994).
In dynamic simulation, the starting hexapod
configuration is known and serves as an initial
solution. During the sampling period
T the algorithm
has to find the new solution, which will become the
initial solution in the next cycle. Several hexapod
HEXAPOD STRUCTURE EVALUATION AS WEB SERVICE
495
movements were defined as time dependant
functions of the position and orientation of mobile
platform. One of those trajectories is defined with
() ()
() ( ) () ( )
()
()
() ( )
.40,42arctan15
,4cos5
2
sin30
,8.1sin55,2sin38
,
2
cos2.2,
2
sin2
≤≤−⋅=
⋅+
⎟
⎠
⎞
⎜
⎝
⎛
⋅=
⋅=⋅+=
⎟
⎠
⎞
⎜
⎝
⎛
⋅=
⎟
⎠
⎞
⎜
⎝
⎛
⋅=
ttt
t
t
t
ttttz
ttyttx
γ
β
α
ππ
.
(24)
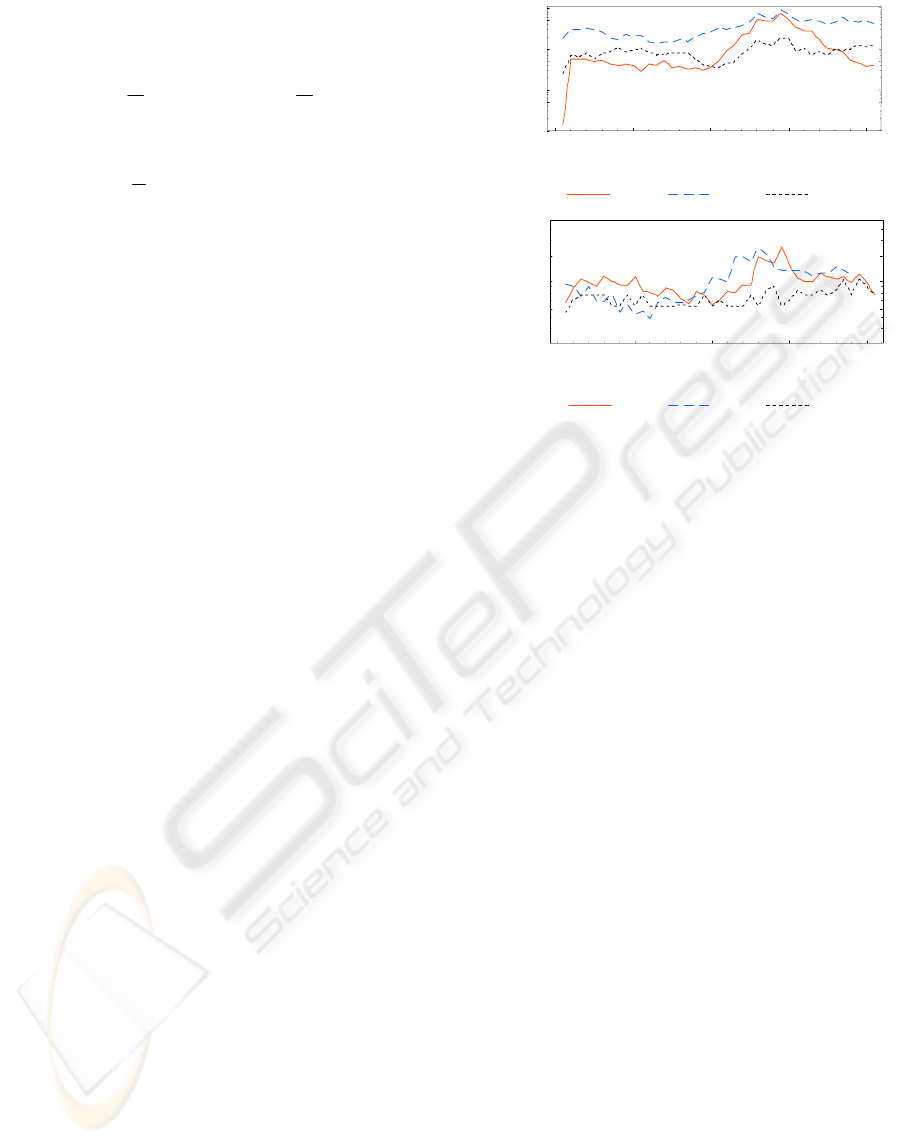
The results of the dynamic simulation are
presented in the form of a graph where errors in the
three rotation angles and three position coordinates
of the mobile are drawn. The sampling period
T was
set to 1 ms, which equals to a 1000 Hz sampling
frequency. The errors shown represent the absolute
difference between the calculated and the actual
hexapod configuration. Due to the large number of
cycles, the error is defined as the biggest absolute
error value in the last 100 ms, so the graphs in each
point show the
worst case in the last 100 ms of
simulation. The errors are presented separately for
angles, in degrees, and position coordinates. The
errors are shown in Figure 3 and Figure 4.
The achieved level of accuracy is very high as
the absolute error does not exceed 10
-12
both for
angles and coordinates.
Mathematical analysis has shown (Raghavan,
1993, Wen, 1994) that there may exist up to 40
distinctive solutions for forward kinematic problem
for Stewart platform with planar base and mobile
platform for the
same set of strut lengths. Let us
suppose that in one hexapod configuration there
exists no other forward kinematic solution for actual
set of strut lengths, but that in some other
configuration there exist several of them. If hexapod
in its movement passes through those two
configurations, then at a certain point in between
there has to be a division point where the number of
solutions increases. In those division points the
solving algorithm may, unfortunately, begin to
follow any of the possible paths, because any of
them represents a valid forward kinematic solution.
If that is the case, the algorithm may either
follow the correct trajectory or the equivalent one. It
is important to note that in both cases the
optimization function remains very low (app. 10
-30
to
10
-20
) during the whole process because both
trajectories depict a valid solution. The problem is,
only one of them represents the actual hexapod
configuration in each point of time.
0 10 20
30
40
Cycle index
1.
×
10
−
15
5.
×
10
−
15
1.
×
10
−
14
5.
×
10
−
14
1.
×
10
−
13
5.
×
10
−
13
1.
×
10
−
12
Absolute error
Figure 4: Absolute angle error
(
α
= ,
β
= ,
γ
= )
0 10 20
30
40
Cycle index
5.
×
10
−
15
1.
×
10
−
14
2.
×
10
−
14
5.
×
10
−
14
Absolute error
Figure 5: Absolute coordinate error
(
x
= , y = ,
z
= )
Without any additional information about the
hexapod configuration, such as may be obtained
from extra transitional displacement sensors, there is
unfortunately no way to determine which of the
existent solutions to the forward kinematic problem
for the same set of strut lengths describes the actual
hexapod configuration. Nevertheless, with some
assumptions we may devise a strategy that should
keep the solving method on the right track. If the
change of the direction of movement is relatively
small during a single period, which is in this case
only 1 ms, then we can try to predict the position of
the mobile platform in the next cycle. We can use
the solutions from the past cycles to construct a
straight line and estimate the initial solution in the
next iteration. Let the solution in the current iteration
be
0
P
r
and the solutions from the last two cycles
1
P
r
and
2
P
r
. Then we can calculate the new initial
solution using one of the following methods:
100
2 PPX
r
r
r
−⋅= ,
(25)
200
5.05.1 PPX
r
r
r
⋅−⋅=
,
(26)
(
)
()
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⋅−⋅=
+⋅=
+⋅=
210
212
101
5.15.2
,5.0
,5.0
TTX
PPT
PPT
rrr
rrr
r
r
r
.
(27)
The above methods were tested for all the
simulated trajectories. The results were very good:
the solving method was able to track the correct
solution during the whole simulation process for all
three estimation methods. The number of conducted
experiments was several hundred and every time the
algorithm's error margin was below 10
-11
both for
angles and coordinates. However, the described
algorithm adaptation will only be successful if the
assumption of a small direction change during a few
ICINCO 2004 - ROBOTICS AND AUTOMATION
496

iterations is valid. To test the algorithm's behavior,
simulated movement was accelerated by factor 2, 4
and 8, while maintaining the same cycle duration of
1 ms. Only by reaching the 8-fold acceleration,
when the total movement time equals a very
unrealistic half a second, did the algorithm produce
more significant errors, while still holding to the
correct solution.
7 HEXAPOD ANALYSIS AS WEB
SERVICE
The described methods of hexapod analysis have
been implemented as Web services at
(http://hexapod.zemris.fer.hr/). Hexapod structure
can be defined through Web interface and then a
particular operation is performed. Workspace
volume can be calculated as a number representing
volume in cubic units, or drawn as VRML shape or
cross-section with horizontal or vertical plane. Error
values and kinematics values can be calculated as
overall values through all workspace or just in cross-
section with a plane.
Implementation is done through CGI programs,
PHP scripting language for Apache Web server,
currently running on a two processor Windows 2000
Server. CGI is chosen because of performance issues
since analysis methods are computationally
intensive. PHP scripts are used to collect hexapod
parameters from users and temporary store them in
session variables. Before calling CGI programs,
PHP script writes parameters to a file on a server.
CGI then reads those files, performs calculations and
produces results. Depending on demanded
calculations, results can be in HTML form, images
or VRML files. VRML format is used for displaying
hexapod models and its workspace. An implicit
surface triangulation method is used for generating
workspace. Improving and optimizing process of
this triangulation method is in progress.
To utilize multiprocessor system a multithreaded
version of program is written since computations can
be easily parallelized. Additional 15-20 percent
speedup is achieved using hyper-threading
technology of Intel Xeon processors.
Regarding speed, workspace calculation can take
up to a few minutes to complete. Kinematics is little
more time demanding, depending on chosen
operation and precision. Error analysis, in spite of
enormous effort in optimizing, is still extremely
slow and time consuming, and it can take 15 to 20
minutes or even more to compute.
8 CONCLUSION
Methods for hexapod analysis are shown, starting
with workspace calculation, error sensitivity analysis
and kinematics evaluation. A forward kinematics
algorithm designed for use in real-time environment
is presented. These methods are prepared and
implemented in a functional Web based system.
ACKNOWLEDGEMENT
This work was carried out within the research
project "Distributed Embedded Computing
Systems", supported by the Ministry of Science and
Technology of the Republic of Croatia.
REFERENCES
Patel, A.J., Ehmann, K.F., 1997. Volumetric Error
Analysis of a Stewart Platform-Based Machine Tool,
Annals of the CIRP, vol. 47/1, pp. 287-290.
Wang, S.M., Ehmann, K.F., 1995. Error Model and
Accuracy Analysis of a Six-DOF Stewart Platform,
Manufacturing Science and Eng., 2-1, pp. 519-530.
Jakobović, D., Jelenković, L., 2002. The Forward and
Inverse Kinematics Problems For Stewart Parallel
Mechanisms,
8
th
Int. Sci. Conf. Production Eng.:
CIM2002,
Brijuni, 2002, pp. II-001- II-012.
Huang, T., Whitehouse, D.J., Wang, J., 1998. The Local
Dexterity, Optimal Architecture and Design Criteria of
Parallel Machine Tools,
Annals of the CIRP, vol. 47/1,
pp.347-351.
Stoughton, R.S., Arai, T., 1993. A Modified Stewart
Platform Manipulator with Improved Dexterity,
IEEE
Trans. on Robotics and Automation
, vol. 9, no. 2, pp.
166-173.
Merlet, J.-P., 1993. Direct Kinematic of Parallel
Manipulators,
IEEE Transactions on Robotics and
Automation
, Vol. 9, No. 6, pp. 842-845
Jakobović, D., Budin, L., 2002. Forward Kinematics of a
Stewart Parallel Mechanism,
Proc. 6
th
Int. Conf. on
Intelligent Engineering Systems INES 2002
, Opatija,
May 26-28., pp.149-154
Dasgupta, B., Mruthyunjaya, T.S., 1994. A Canonical
Formulation of the Direct Position Kinematic Problem
for a General 6-6 Stewart Platform,
Mech. Mach.
Theory
, Vol. 29, No. 6, pp. 819-827,
Raghavan, M., 1993. The Stewart Platform of General
Geometry has 40 Configurations,
Journal of
Mechanical Design
, Vol. 115, pp. 277-282
Wen, F., Liang, C., 1994. Displacement Analysis of the 6-
6 Stewart Platform Mechanisms,
Mechanism and
Machine Theory
, Vol. 29, No. 4, pp. 547-557
HEXAPOD STRUCTURE EVALUATION AS WEB SERVICE
497
