
REAL WORLD ROBOT NAVIGATION BY TWO DIMENSIONAL
EVALUATION REINFORCEMENT LEARNING
Hiroyuki Okada
TOKAI UNIVERSITY, School of Science
Kitakaname 1117, Hiratsuka City,Kanagawa 259-1292,Japan
Keywords:
Reinforcement learning, Reward, Punishment, Mobile robots.
Abstract:
The trade-off of exploration and exploitation is present for a learnig method based on the trial and error such as
reinforcement learning. We have proposed a reinforcement learning algorism using reward and punishment as
repulsive evaluation(2D-RL). In the algorithm, an appropriate balance between exploration and exploitation
can be attained by using interest and utility. In this paper, we applied the 2D-RL to a navigation learning
task of mobile robot, and the robot found a better path in real world by 2D-RL than by traditional actor-critic
model.
1 INTRODUCTION
Reinforcement learning is attracting attention in the
field of machine learning and robotics (Kaelbling,
1996). Reinforcement learning refers to general
learning to obtain appropriate action strategies by trial
and error without an explicit target system model;
instead, learning is accomplished using rewards ob-
tained in the execution environment as the result of
self-generated actions (Unemi 1994). This learning
method is now being actively studied as a frame-
work for autonomous learning because actions can be
learned using only scalar evaluation values and with-
out explicit training.
The purpose of reinforcement learning is to maxi-
mize the total rewards depending on the present and
future the environment. This kind of learning has
two properties. One is optimality (exploration), that
is, to ultimately obtain as many rewards as possible.
The other is efficiency (exploitation), which is to ob-
tain rewards even in the middle of the learning pro-
cess. These properties are in a tradeoff relationship
(Yamamura 1995). If exploration is overemphasized,
convergence into an optimum policy is much longer
as the environment becomes more complicated. Fur-
thermore, only small rewards can be obtained in the
learning process. Conversely, if exploitation is always
emphasized, the learning results decrease to the local
minimum and no optimum policies may be available
at the end of the learning process.
Most of the reinforcement learning algorithms pro-
posed at comparatively early stages emphasize ei-
ther exploration or exploitation. For example, Q-
Learning (Watkins 1992) guarantees the maximum
expected acquisition reward per unit of action at the
end of a learning process. This method can be re-
garded as emphasizing exploration but not consider-
ing the efficiency of exploitation in the learning pro-
cess. Q-Learning determines the efficiency of ex-
ploitation during ad hoc learning at each step in ac-
tion selection (Sutton 1998). It has not yet solved
the tradeoff problem. Another method is profit shar-
ing (Grefenstette 1988), which reinforces past actions
only when a reward is given. This method is good at
exploitation during the learning process but not effi-
cient for whole exploration.
Miyazaki et al. conducted a series of studies
(Miyazaki 1997a)(Miyazaki 1995)(Miyazaki 1997b)
on the tradeoff between exploration and exploitation
in reinforcement learning. Miyazaki proposed a re-
inforcement learning system (MarcoPolo) with an ac-
tion determiner, which consisted of an environmental
identifier for exploration and a reward getter for ex-
ploitation. Miyazaki proved the effectiveness of rein-
forcement learning based on an arbitrary tradeoff ratio
specified by the user. However, at the design or im-
plementation stage, MarcoPolo requires an arbitrary
setting of a tradeoff ratio for exploration and exploita-
tion. The user must determine the appropriate ratio on
a trial-and-error basis.
249
Okada H. (2004).
REALWORLD ROBOT NAVIGATION BY TWO DIMENSIONAL EVALUATION REINFORCEMENT LEARNING.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 249-255
DOI: 10.5220/0001136602490255
Copyright
c
SciTePress

In the conventional framework of reinforcement
training, a one-dimensional scalar value is used to
represent an evaluation reward. It is the only rein-
forcement signal for learning and developing an op-
timum policy. When there are positive and negative
rewards, however, using only a scalar-value reward
may result in a tradeoff between exploration and ex-
ploitation. Uchibe et al. (Uchibe 1999) proposed a
method to make a reward function multidimensional
to enable simultaneous learning of several functions,
and they verified that coordinated actions can be real-
ized in a multi-agent environment. Uchibe’s method
seems effective when there are positive and nega-
tive rewards because of its capability to make a re-
ward function multidimensional and to handle a re-
ward as vector data. However, multidimensional con-
version increases the number of parameters in the re-
ward function and attenuation matrix, thereby making
it difficult to determine optimum values.
Because no clear principle has been defined for
reflecting a multidimensional evaluation on a one-
dimensional action, it is difficult to convert the results
and transfer them into another system.
Knowledge obtained from rats and monkeys about
operand-conditioned subjects (Miller 1959)(Ison
1967) and from humans having damaged brains
(Milner 1963) indicates that distinguishing between
the evaluations of successes and failures has a
tremendous effect on action learning (Yamakawa
1992)(Okada 1997)(Okada 1998). With this in mind,
the authors propose reinforcement learning by a two-
dimensional evaluation. This evaluation involves an
evaluation function based on the dimensions of re-
ward and punishment. An evaluation immediately af-
ter an action is called a reward evaluation if its pur-
pose is to obtain a favorable result after repeated at-
tempts to learn an action, or punishment evaluation if
its purpose is to suppress an action.
Reinforcement learning using the two dimensions
of reward and punishment separates the conventional
one-dimensional reinforcement signal into reward
and punishment. The proposed method uses the dif-
ference between reward evaluation and punishment
evaluation (utility) as a factor in determining the ac-
tion and their sum (interest) as a parameter in deter-
mining the ratio of exploration to exploitation. Util-
ity and interest are rough ways to define the principle
of reflecting multidimensional evaluation on a one-
dimensional action.
Chapter 2 describes the formulation of the pro-
posed reinforcement learning method based on the
two dimensions of reward and punishment. Chapters
3 prove the usefulness of the proposed system by de-
scribing the learning process of an autonomous mo-
bile robot. Finally, Chapter 4 summarizes the study.
2 REINFORCEMENT LEARNING
BASED ON TWO DIMENSIONS
OF REWARD AND
PUNISHMENT
2.1 Basic Idea
Two-dimensional reinforcement learning basically
consists of two aspects. One is to distinguish be-
tween reward evaluation and punishment evaluation
forecasts. The other is to determine an action accord-
ing to the combined index of positive and negative
reward forecasts.
2.1.1 Search by interest and resource allocation
The conventional reinforcement learning method uses
only the difference (utility) between reward and pun-
ishment reinforcement signals in an evaluation to
determine an action. In comparison, the proposed
method determines the sum (interest) of reward and
punishment evaluation signals and considers it as a
kind of criticality. Criticality can be considered to be
curiosity or motivation in living things, and it used to
determine which processing should be noted. In other
words, not only in reinforcement learning but in any
other kind of trial-and-error learning it can be used to
determine the ratio of exploration search to exploita-
tion action.
2.1.2 Distinction of the time discount ratio of
forecast reward
In reinforcement learning, a forecast reward is dis-
counted more if it’s more likely to be received in the
future. This discount ratio is called the time discount
ratio (γ) of the forecast reward. The value of γ ranges
from 0 to 1.0. If the value is 0, only the current rein-
forcement signal is noted and its future reinforcement
is disregarded. If the value is 1.0, the evaluation of
action is considered until the distant future.
In many practical problems, a reward reinforce-
ment signal is related to the method used to move to-
ward a goal and a forecast reward signal is used for
learning a series of actions to reach the goal. To con-
sider the effect of a goal that is far away, the γ setting
must therefore be large.
Meanwhile, if a punishment reinforcement signal
for avoiding a risk has an effect too far away from the
risk, an avoidance action may be generated in many
input states. In turn, the search range of the operat-
ing subject is reduced, thereby lowering the perfor-
mance of the subject. Therefore, to generate a pun-
ishment reinforcement signal for initiating an action
ICINCO 2004 - ROBOTICS AND AUTOMATION
250
to avoid an obstacle only when the obstacle is imme-
diately ahead, the value of γ must be small in the sig-
nal.
For example, how can a robot moving toward a
goal avoid at an appropriate distance an object in its
path ? If the environment has an avoidance circuit de-
signed to function immediately before a punishment
state (collision against an obstacle) and the circuit is
surely operable, the robot can only learn the action of
avoiding the punishment target only if the γ setting is
0. However, in an uncertain environment or if a dead-
end punishment is in the passageway, the value of γ
must be raised to maintain a greater distance from the
punishment target.
Considering these factors, a different γ value is set
for each evaluation of reward and punishment under
the following policies:
• Reward evaluation
The γ setting is large and is effective at a long
range. This evaluation is mainly used to reach a
goal.
• Punishment evaluation
The γ setting is small and is effective at a short
range. This evaluation is mainly used to avoid risk.
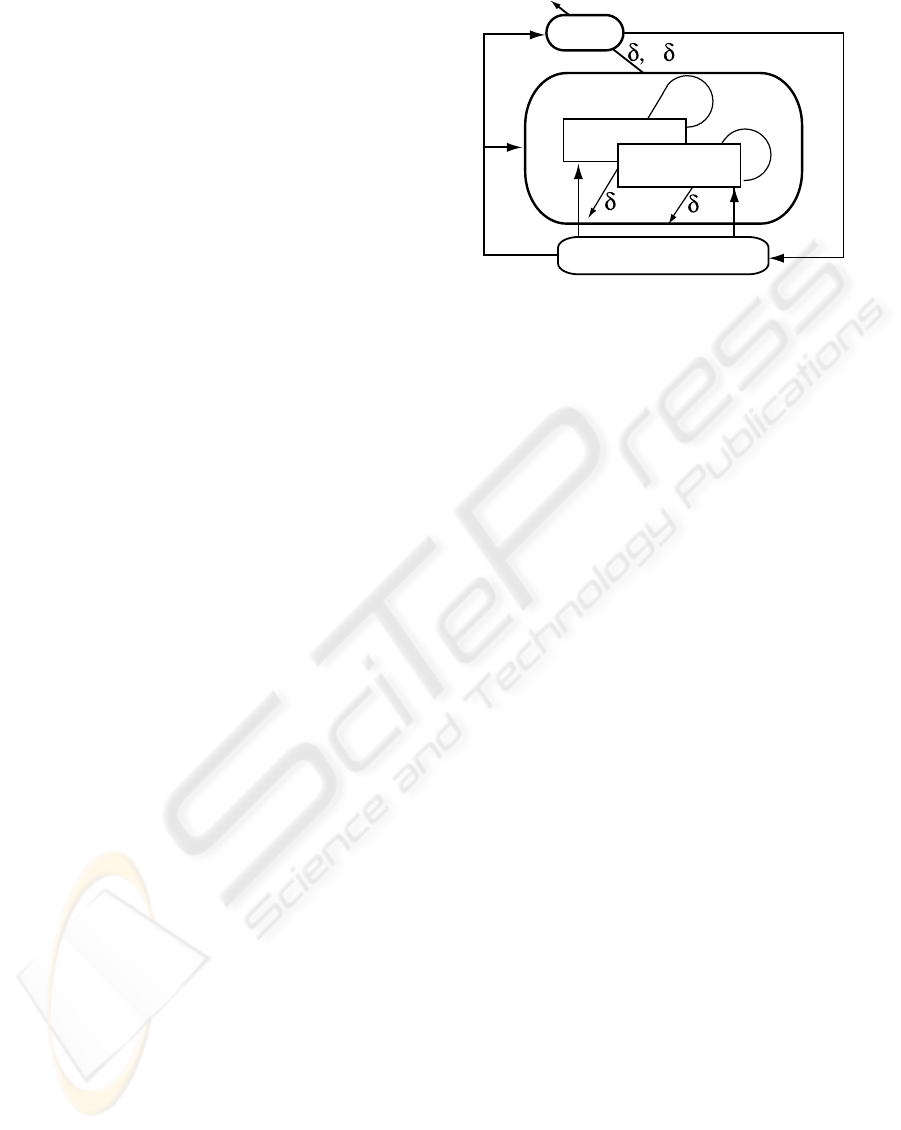
2.2 Actor-Critic Architecture Based
on Two-dimensional Evaluation
2.2.1 Actor-Critic architecture
Figure 1 shows the actor-critic architecture (Barto
1983) based on the proposed two-dimensional eval-
uation. Critic consists of a Reward section for re-
ward evaluation and a Punishment section for punish-
ment evaluation. Each section receives a state (s), a
reward evaluation (r
R
), and a punishment evaluation
(r
P
) according to the environment, and each section
learns the forecast values. Both r
R
and r
P
are positive
values and interest (δ
+
) and utility (δ
−
) are defined
according to the TD differences (δ
R
, δ
P
) related to
the forecasts of reward and punishment evaluations,
which are shown below:
δ
−
= δ
R
− δ
P
: Utility (1)
δ
+
= |δ
R
| + |δ
P
| : Interest (2)
Actor learns an action strategy using δ
−
(utility) as
a de facto reinforcement signal and δ
+
(interest) to
determine the ratio of exploitation action to environ-
mental search action.
2.2.2 State evaluation (Critic)
The reward evaluation, V
R
(s(t)), and punishment
evaluation, V
R
(s(t)), to state s(t) at time t are defined
state : s
rR
Actor
Critic
Environment
action : a
rP
+
-
Reward
Punishment
R
P
Policy
Figure 1: Outline of actor-critic architecture based on two-
dimensional evaluation.
as follows:
V
R
(s(t)) = r
R
(t) + γ
R
r
R
(t + 1) + γ
2
R
r
R
(t + 2) + . . .
=
∞
X
i=t
γ
i−t
R
r
R
(i) (3)
V
P
(s(t)) = r
P
(t) + γ
P
r
P
(t + 1) + γ
2
P
r
P
(t + 2) + . . .
=
∞
X
i=t
γ
i−t
P
r
P
(i) (4)
where r
R
(t) and r
P
(t) are the reward and punishment
evaluation values (positive), respectively, at time t.
r
R
(t) represents the time discount ratio of the reward
evaluation forecast and r
P
(t) represents the time dis-
count ratio of the punishment evaluation forecast.
Based on equations (3) and (4), the following re-
lationship can be established between the evalua-
tion forecast value
ˆ
V (s(t)) at the current time and
ˆ
V (s(t + 1)) at the subsequent time:
ˆ
V
R
(s(t)) = r
R
(t) + γ
R
ˆ
V
R
(s(t + 1)) (5)
ˆ
V
P
(s(t)) = r
P
(t) + γ
P
ˆ
V
P
(s(t + 1)) (6)
By learning to approximate forecast errors (δ
R
(t),
δ
P
(t)) to 0, status evaluations can be accurately fore-
cast.
δ
R
(t) = r
R
(t) + γ
R
ˆ
V
R
(s(t + 1)) −
ˆ
V
R
(s(t)) (7)
δ
P
(t) = r
P
(t) + γ
P
ˆ
V
P
(s(t + 1)) −
ˆ
V
P
(s(t)) (8)
where δ
R
(t) represents forecast errors related to re-
ward evaluations and δ
P
(t) represents those related
to punishment evaluations.
2.2.3 Determination of action (Actor)
Actor is used to develop an action strategy that max-
imizes the reward forecast by Critic. The proposed
REALWORLD ROBOT NAVIGATION BY TWO DIMENSIONAL EVALUATION REINFORCEMENT LEARNING
251
method determines action strategy π(s, a) for taking
action a(t) in state s(t) at time t as follows:
π(s(t), a(t)) = Pr{a(t) = a|s(t) = s}
=
exp(
p(s(t),a(t))
δ
+
(t)
)
P
b
exp(
p(s(t),b(t))
δ
+
(t)
)
(9)
where p(s(t), a(t)) indicates whether it is prefer-
able to take action a(t) in state s(t) at time t.
Interest(δ
+
(t)) realizes a search function for large er-
rors in TD learning. As Interest becomes greater,
actions become more random with a greater prior-
ity placed on the search. If Interest is small, a
slight difference in p(s(t), a(t)) has a great effect
on action selection. This difference is corrected us-
ing Utility(δ
−
(t)) as expressed below, where positive
constant β represents the learning rate:
p(s(t), a(t)) ← p(s(t), a(t)) + βδ
−
(t) (10)
At the initial stage of learning, both δ
R
and δ
P
be-
come 0 and consequently, δ
+
may also become 0. If
this occurs, actions are taken at random.
3 SEARCHING FOR A GOAL IN
PHYSICAL ENVIRONMENT
INCLUDING MANY POSSIBLE
PATHS
To confirm the effectiveness of two-dimensional eval-
uation reinforcement learning in a physical environ-
ment, an actual mobile robot searched for a path in
an office. Using a computer with a mobile robot sen-
sor database, the authors first confirmed that an opti-
mum path can be found if resources are appropriately
allocated between search and execution processing.
Then, the learning results were downloaded into the
actual mobile robot for the experiment.
3.1 Mobile Robot Experiment in
Physical Environment
During a search for a path by a mobile robot in a phys-
ical environment, controlling the robot using learning
results from a mobile robot simulator is difficult be-
cause the simulator cannot satisfactorily express the
complexities of a real-world environment. The mov-
ing speed and maintenance costs also make it difficult
for a mobile robot to learn by repetitive trial and er-
ror. To eliminate the discrepancy between an actual
mobile robot and a simulator, the authors developed
a network-distributed mobile robot experimentation
system (MEMORABLE: Multilevel Environment for
Mobile Robotics Capability Experiments) including a
database of sensor data collected by mobile robots in
a physical environment (Okada 1999). By using data
actually measured by sensors to train a mobile robot,
MEMORABLE realized a robust method of learn-
ing capable of handling the complexities of the real
world, and MEMORABLE reduced the learning time
to less than that required in the conventional method
on a mobile robot simulator. Furthermore, the system
enables objective evaluations for determining whether
the proposed learning method is also effective in a
physical environment.
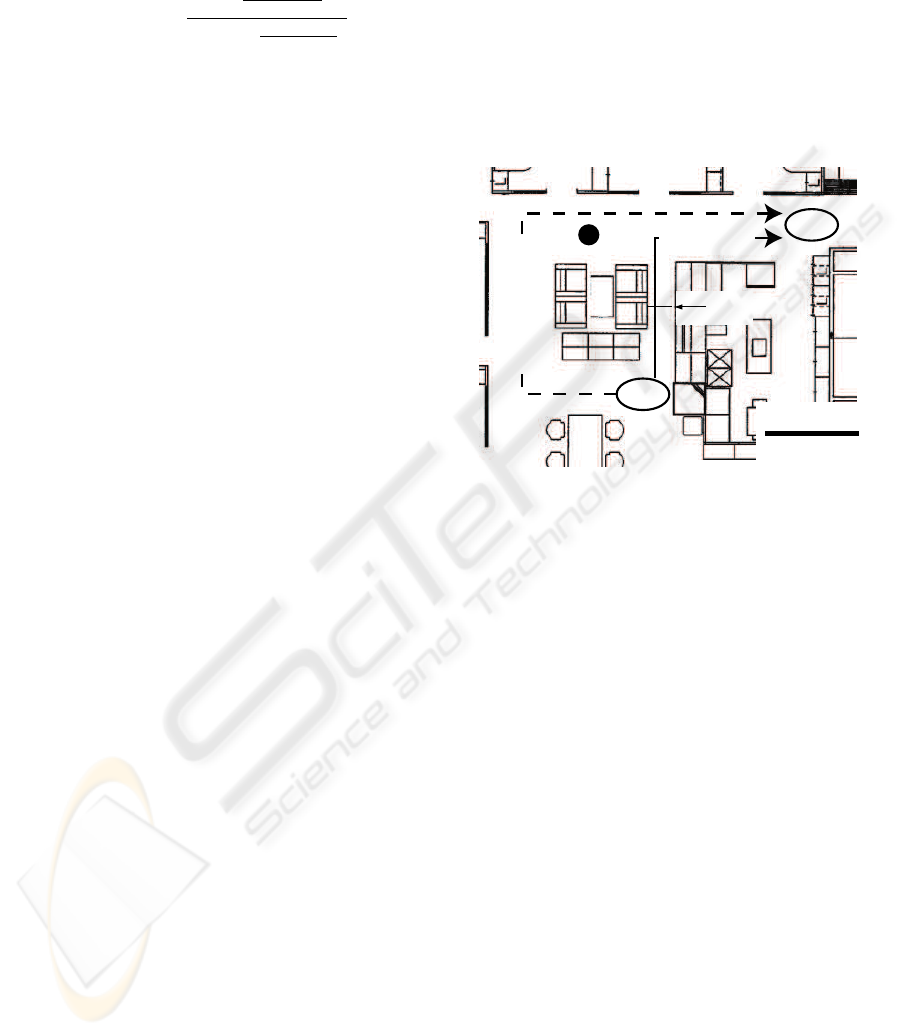
Goal
Nomad200
Start
easy-finding path
short-cut path
950mm
2500mm
Figure 2: Office map explored by Nomad200. There are two
ways to the goal, easy-finding path(dotted line) and short-
cut path(solid line).
3.2 Experimental Settings
The mobile robot (Nomad 200) used for the experi-
ment has a cylindrical shape of 60 cm in diameter and
80 cm in height. Sixteen sonar and infrared sensors
are arranged on the circumference of the body to mea-
sure obstacle distances, but the distance sensors have
an effective range for measuring distances. The sonar
sensors can measure distances from 40 to 600 cm, and
the infrared sensors can measure distances within 40
cm. In the current task, Nomad 200 moves 10 cm to
the front, back, right, or left 10 per step, using a gyro
to keep its front side facing north (upward in Figure
2).
The purpose of the robot is to search for a path
from the starting position to the goal, without collid-
ing with any obstacles, in the office depicted in Fig-
ure 6. The evaluations (r
R
, r
P
) expressed below are
given to the robot. The conventional method of rein-
forcement learning used for comparison was based on
the Actor-Critic architecture that does not distinguish
between reward and punishment. For this learning
process, the evaluations for one-step movement and
collision were set to negative values (-0.01 and -1.0,
ICINCO 2004 - ROBOTICS AND AUTOMATION
252

respectively).
r
R
= 5.0 for reaching the goal (11)
r
P
=
½
1.0 for collision
0.01 for moving action
(12)
The robot begins at the starting position and con-
tinues moving until it collides against an obstacle. If
a collision occurs, the robot has to begin again from
the starting position. The time discount rates for re-
ward and punishment evaluation forecasts in the ex-
periment were set to r
R
= 0.9 and r
P
= 0.1, re-
spectively. For the conventional method, nnn the time
discount rate for reward was set to 0.90.
3.3 Search for Shortest Path by
Two-dimensional Evaluation
Reinforcement Learning
There are two kinds of paths from the starting point to
the goal (Figure 2). One is a path that is easy to find
and secure way through wide passageway, but it is a
roundabout route. The other kind of path is a short-
cut, which is a short route with a high risk of colli-
sion through a narrow passageway. In the experiment,
searching for a shorter path without collisions results
in greater rewards because negative rewards are given
for single-step movements and collisions against ob-
stacles.
As Figure 2 shows, a narrow passageway for the
60-cm cylindrical body of Nomad 200 is about 95
cm wide. Moving through this passageway raises the
probability of a collision against an obstacle. There-
fore, although a shortcut to the goal is shorter, taking
this path at the initial stage of learning often results
in negative rewards because of collisions against ob-
stacles. In the easy-to-find path, the probability of
reaching the goal is high, even at the initial stage of
learning when the robot action is unstable. This is
because the path to the goal is through a wide pas-
sageway. However, the distance to the goal is long,
and the total rewards are small in the end.
In this experiment, a search results in a selec-
tion conflict between a shortcut found only after re-
peated collisions and an easy-to-find path found with
a priority on avoiding any obstacles immediately
ahead. Using the conventional method may find a
path through the wide passageway, where it is com-
paratively easy to obtain rewards, and it may fail to
find the shortest path to the goal. In contrast, using
the two-dimensional evaluation reinforcement learn-
ing method can balance the acquisition of new in-
formation with some risk and the action of exploita-
tion based on past experience. Use of this proposed
method is expected to solve the above conflict.
3.4 MEMORABLE Experimental
Results
0 500 1000
0
0.5
1.0
Goal reaching probability
Epochs(=10000 trials)
2D Actor-Critic
Actor-Critic
Figure 3: Goal reaching probability of pro-
posed method(solid line) and traditional actor-critic
method(dotted line).
0 500 1000
-0.02
Total reward/steps
Epochs(=10000 trials)
2D Actor-Critic
Actor-Critic
-0.01
0
0.01
0.02
0.03
0.04
Figure 4: Reward per step of proposed method(solid line)
and traditional actor-critic method(dotted line).
3.4.1 Probability of reaching goal and
exploitation
One phase of the experiment consists of learning and
test trials. The robot begins at the starting position
and continues moving until it collides against an ob-
stacle. If a collision occurs, the robot begins again at
the starting position. This series of actions is called
a trial. A learning trial is repeated 1000 times as an
epoch. Then, a test trial is repeated 100 times using
different random numbers to calculate the probability
of reaching the goal and the reward obtained per step.
Figure 3 shows probability of reaching the goal,
and Figure 4 shows the average reward obtained per
step. The solid line indicates the results of using the
proposed method, and the dotted line indicates the re-
sults of using the conventional method.
In using the proposed method, the probability of
reaching the goal quickly increased after about 200
REALWORLD ROBOT NAVIGATION BY TWO DIMENSIONAL EVALUATION REINFORCEMENT LEARNING
253

epochs and remained at between 80 and 90% after
400 epochs. In using the conventional method, the
probability of reaching the goal gradually increased
after about 300 epochs and reached 90% after 700
epochs. The probability of reaching the goal was
higher for the conventional method than for the pro-
posed method because easy-to-find paths were gener-
ated in many cases.
When exploitation per step was compared for the
proposed and conventional methods, the difference
was remarkable. Using the conventional method gen-
erates a long path to the goal, an easy-to-find path.
This reduces the average reward received because of
the effect of the negative reward given for every step.
Conversely, using the proposed method generates a
short path, a shortcut. This increases the average re-
ward per step after 400 epochs when the number of
collisions against a wall decreases.
3.4.2 Comparison of search strategies
0 500 1000
Strategy for goal search
Epochs(=10000 trials)
0.5
1.0
1.0
short-cut path easy-finding path
2D Actor-Critic
Actor-Critic
Figure 5: Goal searching strategy of proposed method(solid
line) and traditional actor-critic method(dotted line).
Figure 5 compares the ratio of easy-to-find paths
to shortcuts as selected by the proposed method with
the equivalent ratio for the conventional method. As
the figure shows, the conventional method searched
for the easy-to-find paths at a rate of 95% or more
after about 150 epochs. The instruction to avoid any
obstacle immediately ahead is fixed. This means that
the results by the conventional method are reflecting
risk avoidance actions.
At the initial stage of learning before 400 epochs,
the proposed method searched for easy-to-find and
shortcuts in a 50:50 ratio. This confirms a good bal-
ance between attempts to obtain new information with
some risk and actions for exploitation.
When a robot moves in a physical environment, the
learning of risk avoidance actions is important. How-
ever, the maximum operating time depending on bat-
tery power, the maximum path length, and other cost
factors must be considered. The optimum action is
not simply risk avoidance. This experiment confirmed
the effectiveness of the proposed method that auto-
matically determines the tradeoff between risk avoid-
ance and exploitation.
3.5 Trials by Actual Mobile Robot
Goal
Start
2500mm
Figure 6: Execution by real mobile robot. Successful
cases(thick line) and unsuccessfull cases(thin line).
The learning results were imported into an actual
mobile robot to prove that searching for a goal is pos-
sible in a physical environment. Subsequently, three
trials out of ten ended halfway because of collisions
against obstacles, but the remaining seven trials ended
in successful shortcut being taken to reach the goal.
These successes prove the proposed method can be
effective in searching for a goal in a physical environ-
ment.
For comparison, the learning results from the mo-
bile robot simulator attached to Nomad were imported
into an actual mobile robot, and the same experiment
was conducted. Although a path to reach the goal was
found on the simulator, the actual mobile robot failed
on all of the 10 trials. Figure 10 shows the paths of
the mobile robot in two successful trials after training
by MEMORABLE (thick line) and two unsuccessful
trials after training by the mobile robot simulator (thin
line).
The performance of robots in MEMORABLE
seemed to indicate learning after repeated attempts to
perform tasks such those in the current experiment ac-
cording to the data collected by an actual robot.
4 CONCLUSION
To solve the problem of tradeoff between exploration
and exploitation actions in reinforcement learning,
ICINCO 2004 - ROBOTICS AND AUTOMATION
254

the authors have proposed two-dimensional evalua-
tion reinforcement learning, which distinguishes be-
tweenbbbb reward and punishment evaluation fore-
casts.
In the proposed method of reinforcement learning
using the two dimensions of reward and punishment,
a reinforcement signal dependent on the environment
is distinguished into reward evaluation after success-
ful action and punishment evaluation after an unsuc-
cessful action. The proposed method uses the differ-
ence between reward evaluation and punishment eval-
uation (utility) as a factor for determining the action
and the sum (interest) as a parameter for determining
the ratio of exploration to exploitation.
This paper has described an experiment with a mo-
bile robot searching for a path and the subsequent
conflict between exploration and exploitation actions.
The results of the experiment prove that using the pro-
posed method of reinforcement learning using the two
dimensions of reward and punishment can generate a
better path than using the conventional reinforcement
learning method. MEMORABLE enables the pro-
posed method to be effective for actual robots search-
ing a path in a physical environment.
ACKNOWLEDGEMENT
This study was conducted as part of the Real World
Computing Program.
REFERENCES
L.P.Kaelbling, K.L.Littman and A.W.Moore(1996). Rein-
forcement learning :A survey. In Journal of Artificial
Intelligence Research. vol.4, pp237-285.
T.Unemi(1994). Reinforcement Learning. In Journal of
Japanese Society for Artificial Intelligence. vol.9,
no.6, pp830-836.
M.Yamamura, K.MIyazaki and S.Kobayashi(1995). A Sur-
vey on Learning for Agents. In Journal of Japanese
Society for Artificial Intelligence. vol.10, no.5, pp23-
29.
C.J.Watkins and P.Dayan(1992). Learning. In Machine
Learning. vol.8, pp.55-68.
R.S.Sutton and A.G.Barto(1998). Reinforcement Learning.
MIT Press.
J.J.Grefenstette(1998) Credit Assignment in Rule Discov-
ery Systems Based on Genetic Algorithms. In Ma-
chine Learning. vol.3, pp225-245.
K.Miyazaki, M.Yamamura and S.Kobayashi(1997) A The-
ory of Profit Sharing in Reinforcement Learning. In
Journal of Japanese Society for Artificial Intelligence.
vol.9, no.4, pp104-111.
K.Miyazaki, M.Yamamura and S.Kobayashi(1998) k-
Certainty Exploration Method: An Action Selector on
Reinforcement Learning to Identify the Environment.
In Journal of Japanese Society for Artificial Intelli-
gence. vol.10, no.3, pp124-133.
K.Miyazaki, M.Yamamura and S.Kobayashi(1997) Mar-
coPolo: A Reinforcement Learning System Consid-
ering Tradeoff Expolitation and Exploration under
Markovian Environment In Journal of Japanese So-
ciety for Artificial Intelligence. vol.12, no.1, pp78-89.
E.Uchibe and M.Asada(1999) Reinforcement Learning
based on Multiple Reward Function for Cooperative
Behavior Acquisition in a Multiagent Environment In
RSJ’99. vol3, pp.983-984.
N.E.Miller(1959). Liberalization of basic S-R con-
cepts:extensions to conflict behavior, motivation and
social learning. In Koch.S(Ed), Psychology:A Study of
a Science. New York:McFraw-Hill.
J.R.Ison and A.J.Rosen(1967). The effect of amobarbi-
tal sodium on differential instrumental conditioning
and subsequent extinction. In Psyhopharmacologia.
vol.10, pp417-425.
B.Milner(1963). Effects of different brain lesions on card
sorting. In Archives of Neurology. vol.9, pp10-100.
H.Yamakawa(1992). Intelligent System Based on Reinfoe-
cement Learning. In Ph.D thesis Tokyo University.
H.Okada and H.Yamakawa(1997). Neuralnetowrk model
for attention and reinforcement learning. In SIG-CII-
9710. pp4-14.
H.Okada, H.Yamakawa and T.Omori(1998). Neural Net-
work model for the preservation behavior of frontal
lobe injured patients. In Proc. of ICONIP’98. pp1465-
1469.
A.G.Barto, R.S.Suttond and C.W.Anderson(1983). Neu-
ronlike Adaptive Elements That Can Solve Difficut
Learning Control Problems. In IEEE Transaction on
Systems, Man and Cybernetics. vol.13, no.5, pp834-
846.
H.Okada, O.Ito, Y.Hagihara, K.Niki and T.Omori(1999)
Multilevel Environment for Mobile Robotics Capabil-
ity Experiments (MEMORABLE). In Journal of the
Robotics Society of Japan. vol.17, no.6, pp142-150.
REALWORLD ROBOT NAVIGATION BY TWO DIMENSIONAL EVALUATION REINFORCEMENT LEARNING
255
