
STEREO VISION SENSOR FOR 3D MEASUREMENTS
A complete solution to produce, calibrate and verify the accuracy of the
measurements results
Liviu Toma, Fangwu Shu, Werner Neddermeyer
Informatics Department, University of Applied Sciences Gelsenkirchen, Germany
Alimpie Ignea
Optical Electronics Department, University “Politehnica” Timisoara, Romania
Keywords: calibration, camera model, correspondence problem, distortion, stereo-vision,
sub-pixel accuracy
Abstract: The goal of this paper is to build a stereo sensor to be used as a 3D measurement tool with direct application
in automotive industry. The distance between the object to be measured and the stereo sensor is between
200 mm and 300 mm. This paper presents the solutions developed in order to produce, calibrate and verify a
stereo sensor used to measure 3D coordinates with an accuracy of 0.1 mm. The measurement area is defined
by a square with a side of 100 mm. The contribution of this paper to the extant literature is twofold. First, it
presents a new method to compute the coefficient of the radial distortion. Second, it develops an image-
processing algorithm, in order to minimize the errors that occur from the non-correspondence problem. The
most important issues that need to be addressed are the following: defining a camera model in order to best
simulate a real camera, and identifying the same point with both cameras of the stereo sensor
(correspondence problem), in order to reduce the measurement errors.
1 INTRODUCTION
The camera calibration problem has been
extensively studied over the past 25 years. The
extant literature addressing this topic can be divided
into two categories: the calibration of zooming and
rotating cameras (Agapino, 2001) and the calibration
of fixed cameras (Armangue, 2000). The calibration
developed and presented in this paper belongs to the
latter category.
Armangue, Salvi and Balle (2000) is a very good
sur
vey
of existing calibration methods of fixed
cameras. According to this study, there are four
calibration methods: the method of Hall (Hall,
1982), the method of Faugeras-Toscani (Faugeras,
1986), the method of Tsai (Tsai, 1987) and the
method of Weng (Weng, 1992). We used the method
of Tsai and the method of Faugeras-Toscani, as main
references in our work.
The remainder of this paper is organized as
follows. Section
2 prese
nts the camera model we
consider. Section 3 describes the image
segmentation alghorithm. We present the calibration
procedure that we developed in Section 4, and the
measurement procedure in Section 5. The analysis
of the errors obtained with our sensor is presented in
Section 6, while Section 7 briefly describes two
possible industrial applications of the stereo sensor.
Section 8 concludes.
2 CAMERA MODEL
Our goal is to find that set of parameters which best
simulates the behavior of a real camera. Generally,
the camera parameters are divided in two categories:
extrinsic parameters and intrinsic parameters
(Faugeras, 1993).
There are six extrinsic camera parameters. We
d
eno
te them t
x
, t
y
, t
z
, α, β, γ. The first three give the
position and the last three the orientation of the
camera frame with respect to a reference frame or a
world frame. In our case we call this reference frame
the stereo sensor frame. The position of the stereo
sensor frame is in the middle of the calibration plate
and the orientation is as one can see in Figure 1.
410
Toma L., Shu F., Neddermeyer W. and Ignea A. (2004).
STEREO VISION SENSOR FOR 3D MEASUREMENTS - A complete solution to produce, calibrate and verify the accuracy of the measurements
results.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 410-416
DOI: 10.5220/0001138204100416
Copyright
c
SciTePress

Figure 1: Stereo sensor frames
More details about the calibration plate are
provided in Section 4. Axes x and y are in the same
plane with the calibration plate and axis z is
orthogonal to this plane.
Things become a little more complicated with
respect to camera intrinsic parameters. The simplest
model is the pinhole model. This is a distortion-free
model, which includes four independent parameters:
s
x
f, s
y
f, C
x
, and C
y
, where we denote the focal length
by f, the scale factors by s
x
and s
y
and the center of
the image (the intersection of the optical axis with
the CCD chip plane) by C
x
and C
y
. A better
simulation of a real camera is given by a model
which includes the radial distortion. We denote the
coefficient of the radial distortion by k. There are
camera models which also include other types of
distortions, such as decentering and thin prism
distortion (Weng, 1992). Theoretically, we should
also consider the skew factor (Faugeras, 1993). The
skew factor is a function of the angle between the
axes defined by two adjacent sides of the CCD chip.
Normally, this angle is 90 degrees, and in this case
the skew factor will have no influence on the
perspective matrix. Other intrinsic parameters can be
introduced to model the fact that the optical axis is
not orthogonal to the CCD chip. This is one of the
next problems to address in our future work.
In order to reach the required accuracy (see
abstract), we consider a model that includes the four
standard intrinsic parameters s
x
f, s
y
f, C
x
, and C
y
and
the coefficient of the radial distortion k. Because of
technological progresses in manufacturing lenses
and CCD chips, the effects of distortions, other than
the radial distortion, and that of the skew factor are
very small.
We present below a short description of the
mathematical model considered for the radial lens
distortion. There are two types of radial distortion,
one positive, called pincushion distortion, and one
negative, called barrel distortion (Landsberg, 1958).
The lenses we have used are affected by barrel
distortion.
We consider two points, P
u
which is the ideal
point, undistorted, and P
d
, which is the real point,
distorted. The coordinates of these points are X
u
, Y
u
and X
d
, Y
d
, respectively. We approximate the
distortion by the following relations
(
)
dddu
RfXXX
⋅
+
=
, (1)
(
)
dddu
RfYYY
⋅
+
=
, (2)
where R
d
is defined by the following relation
()()
(
)
2
1
22
ddd
YXR += . (3)
According to the literature for this radial
distortion, only the second order term has a
significant value (Weng, 1992).
We can then approximate the function f by the
following expression
(
)
2
dd
RkRf ⋅= , (4)
where k is the coefficient of radial distortion, as
described at the beginning of this section. Using
Eqs. (1) – (4), we obtain, after some mathematical
computations
2
1
1
d
du
Rk
XX
⋅+
⋅=
, (5)
2
1
1
d
du
Rk
YY
⋅+
⋅=
. (6)
We use these two relations in our further
calculations to model the radial distortion.
STEREO VISION SENSOR FOR 3D MEASUREMENTS - A complete solution to produce, calibrate and to verify the
accuracy of the measurements results
411

3 IMAGE PROCESSING
ALGORITHM
The first problem was to decide what type of marks
one can use in order to identify them in the pictures
obtained from the CCD cameras. One solution was
to use crosses. The other was to use circles. We
decided to use circles and the reasons why we did so
are presented further in the section.
The accuracy of the information obtained from
the marks is directly dependent to the accuracy of
the detected edge points. If we take a circle having a
radius r, the total length of the edges is given by
rL
Circle
*2
π
=
. (7)
For a cross, with the dimensions 2r horizontal and 2r
vertical, the total length of the edges is given by
rL
Cross
*8=
. (8)
Based on these two relations, we show that the
number of the edge points for a circle is smaller than
the number of the edge points for the corresponding
cross. Thus, we have to detect more edge points in
the case when a cross is used than in the case of a
circle. Each one of the edge points is detected with
an error and affects the information used in our
further calculations. Therefore, more edge points
means more errors and this ultimately will have a
higher effect on the amount of useful information.
The next problem was to find a segmentation
method, by which to decide which pixels belong to
the circle and which belong to the background.
Initially, we worked at the pixel level using
segmentation methods based on dynamic thresholds
(Parker, 1997, and Gui, 1999). The results are better
than when we use only the functions from the image
processing software. However, an alternative
method, which consists in working at the sub-pixel
level, can further improve these results. We explain
further in more details why we chose this method,
and present the algorithm we developed.
Consider the following example based on a real
situation: a simple plate, which is half white and half
black, as in Figure 2.a1. If we take the image of this
plate through a camera, and store it on the chip, it
will be a little distorted, as one can see in Figure
2.a4. We consider that the transfer from the chip
image to the computer image takes place without
errors. Therefore, the situation presented in Figure
2.a4 is also valid at the pixel level.
In most cases, the border between an object and
the background in the pixel image should be situated
on the surface of one pixel, and not at the border
between two pixels. Due to physical considerations,
we cannot have two different levels of electricity in
one cell of the chip. Furthermore, the corresponding
pixel cannot have two grey levels. We develop a
mathematical algorithm, which determines a sub-
pixel value associated with the location of the border
between two grey levels.
Our goal is to reach an accuracy of a tenth of a
pixel. To obtain that level of precision, we have to
explore each “circle” in the following way: we start
from the weight point of the “circle” with lines to
the edges of the “circle”. One thing to be mentioned
here, the term “circle” denotes the calibration mark,
which by projection to the image becomes an ellipse.
There are two problems that must be solved. The
first one is to decide how many lines to use. The
second one is to compute the grey level in certain
sub-pixel positions situated on this line.
Figure 2: Details concerning the sub-pixel resolution
ICINCO 2004 - ROBOTICS AND AUTOMATION
412

The number of lines to use is determined by the
value of the angle between two consecutive lines.
The length of the circle is computed using the
following equation
pRL
C
∆⋅⋅=
π
2
, (9)
where ∆p is the length associated with one side of a
square pixel. The angle between two consecutive
exploration lines will be computed using the
following relation
[
grad
nR ⋅⋅
=∆
π
α
180
]
. (10)
where n is the number of parts in which we want to
divide a pixel. In our case, we take n equal to 10 and
the maximum value for the radius, R, equal to 20.
This way, we obtain a value of 0.28 for
∆α
,
suggesting that we use approximately 1285
exploration lines.
For each of these lines we analyze a part of it
with a length equal to the length of 5 pixels. The
middle of this part is situated at a distance equal to
the circle radius R. Between the Cartesian
coordinates of one point situated in this part of the
line and the polar coordinates of the same point, the
following two relations can be written
()
α
cos
⋅
++= dRCx
x
, (11)
(
)
α
sin
⋅
++= dRCy
y
, (12)
where d takes values between –2.5 and +2.5. The
difference between two consecutive values of d is
0.1. C
x
and C
y
are the coordinates of the “circle”
weight point. As indicated before, our goal is to have
the grey level of the points situated at any location d
on the exploration line. Using Eqs. (11) and (12), we
compute the corresponding coordinates (x, y) for
each of the 51 values of d. The problem now
becomes that these coordinates (x, y) have float
values and we only know the grey level for those
with integer values.
Next, we present a solution for computing the
grey level of a point whose coordinates take float
values. In Figure 2.b, we show a square formed by
nine pixels.
The values taken by x any y are positive integers.
They represent the location of the pixel in the image.
With small circles we have denoted the grey levels
of the pixels, and placed them in the middle of their
corresponding pixels. We are next interested in
computing the grey level of the point situated at the
location (x
1
,y
1
), as one can see in Figure 2b. The
following notations are made in order to simplify the
calculations
xxx
−
=
∆
1
, (13)
yyy
−
=
∆
1
. (14)
Next, the grey level of the point situated at
location (x
1
, y
1
) can be calculated using the relation
(
)
(
)
(
)
(
)
()()
()
()(
yxyxg
yxyxg
yxyxg
yxyxgyxg
∆−⋅∆⋅++
+∆⋅∆⋅+++
+∆⋅∆−⋅++
+∆−⋅
)
∆
−
⋅
=
1,1
1,1
11,
11,,
11
. (15)
Following the algorithm described before, we
generate 51 pairs (d
i
, g(d
i
)), where d
i
takes values
between –2.5 and +2.5, and i takes values between 0
and 50.
In order to simplify the mathematical
calculations and avoid working with float numbers,
we define a variable D as follows:
10 25Dd
=
⋅− . (16)
where D takes integer values between –25 and +25.
Using the relation
() () ( )
25
,
10
D
GD g gd gxy
−
⎛⎞
===
⎜⎟
⎝⎠
(17)
one can next compute the function G(D).
So far, we managed to divide an interval of five
pixels in fifty sub-pixels intervals, and to compute
for each sub-pixel position the corresponding grey
level.
Next, our approach is to find a mathematical
relation, which best approximates the function G(D).
The following relation defines this function:
(
)
(
)
(
)
00
arctan
GD
GD G K K D D=+⋅ ⋅− . (18)
Our final goal is to compute D
0
. Rewriting the
Eq. 18 as follows
(
)
,00
,, , 0
ii
DG D G
FDGKK=
, (19)
where D
i
and G
i
are those variables calculated in the
previous steps, we will obtain an over determined
system of nonlinear equations. To solve this system,
we first use the Newton algorithm, to make the
system linear, and then least square methods
(Manusar, 1981, Naslau, 1999).
STEREO VISION SENSOR FOR 3D MEASUREMENTS - A complete solution to produce, calibrate and to verify the
accuracy of the measurements results
413

Figure 4: The stereo sensor and the calibration device
4 CALIBRATION OF THE
STEREO SENSOR
In this section, we show the relation between the 3D
coordinates and the 2D pixel coordinates of a
calibration point and the camera parameters. We
start from the equations
()()
z
x
f
s
CX
s
CY
s
CX
k
x
xp
y
yp
x
xp
=
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+
2
2
2
2
1
1
, (20)
()()
z
y
f
s
CY
s
CY
s
CX
k
y
yp
y
yp
x
xp
=
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+
2
2
2
2
1
1
, (21)
where (X
p
, Y
p
) are the pixel coordinates and (x, y, z)
are the 3D coordinates of a calibration point with
respect to the camera frame. The following notations
are made
fsp
xx
=
, (22)
fsp
yy
= , (23)
2
kfd =
. (24)
Using these notations, Eqs. (20) and (21) become
()()
01)(
2
2
2
2
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+−− x
p
CY
p
CX
dpzCX
y
yp
x
xp
xxp
(25)
()()
01)(
2
2
2
2
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+−− y
p
CY
p
CX
dpzCY
y
yp
x
xp
yYp
(26)
Between the 3D coordinates of a calibration
point with respect to the camera frame and the 3D
coordinates of the same point, but with respect to the
stereo sensor frame, one can write the relation
[
]
[
]
T
SSS
Cam
SS
T
zyxTzyx 11 ⋅=
, (27)
where (x
s
, y
s
, z
s
) are the 3D coordinates of the
calibration point with respect to the stereo sensor
frame. The transformation from the camera frame to
the stereo sensor frame is a function of t
x
, t
y
, t
z
, α, β
and γ (Paul, 1981). We denote this function by 28.
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−+
+−
=
1000
coscossincossin
sincoscossinsincoscossinsinsinsinsin
sinsincossincoscossinsinsincoscoscos
z
y
x
Cam
ss
t
t
t
T
αβαββ
αγαβγαγαβγβγ
αγαβγαγαβγβγ
Using Eqs. (27) and (28), we can rewrite Eqs.
(25) and (26) in the following way
0),,,,,,,,,(
,,,
=dCCppttF
yxyxzx
x
zyxYX
SSSPp
γβα
, (29)
0),,,,,,,,,(
,,,
=dCCppttF
yxyxzy
y
zyxYX
SSSPp
γβα
. (30)
The last two equations are non-linear. For each
calibration point, we obtain one pair of non-linear
equations. Using N (N>10) calibration points we
obtain an over-determinate system of non-linear
equations. To solve this system, we first use the
Newton algorithm, to make the system linear, and
then least square methods (Manusar, 1981, Naslau,
1999).
Figure 4 shows the calibration plate. It was made
out of glass, in order to reduce possible
modifications due to the temperature variation. The
accuracy of the circle positions is between –0.01mm
and +0.01mm.
ICINCO 2004 - ROBOTICS AND AUTOMATION
414

One can also see, in Figure 4, that the calibration
plate is fixed on a special device. This device can
provide movements in three orthogonal directions
(x,y,z) with an accuracy situated between -0.01mm
and +0.01mm. The alignment between the frame and
the calibration plate frame is done mechanically, and
is adjusted and controlled using Leica 3D
measurement system with an accuracy of 0.01mm.
Finally, the total accuracy of the position of the
circles is between -0.025mm and +0.025mm.
5 MEASUREMENT PROCEDURE
Our goal is to measure the 3D coordinates of a point
with respect to the stereo sensor frame. We consider
a point P with coordinates x
S
, y
S
, z
S
with respect to
the stereo sensor frame. This point will have the
coordinates x
R
, y
R
, z
R
with respect to the camera right
frame and the coordinates x
L
, y
L
, z
L
with respect to
the camera left frame. With these notations one can
write the next relation:
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⋅−
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⋅
0
0
0
0
11
R
R
R
SS
R
L
L
L
SS
L
z
y
x
T
z
y
x
T
. (31)
where
represents the transformation from the
stereo frame to the camera left frame, and
is the
transformation from the stereo sensor frame to the
camera right frame.
T
SS
L
T
SS
R
From the two images made with the stereo
sensor we find the pixel coordinates of the point P.
We denote these coordinates (X
L
, Y
L
) and (X
R
, Y
R
),
for camera left and right, respectively. Between the
3D coordinates and the pixel coordinates of the point
P one can write the relations
()()
LL
L
x
L
xL
y
yp
x
xp
L
xz
p
CX
p
CY
p
CX
d
=⋅
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+
2
2
2
2
1
1
,(32)
()()
LL
L
y
L
yL
y
yp
x
xp
L
yz
p
CY
p
CY
p
CX
d
=⋅
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+
2
2
2
2
1
1
,(33)
()()
RR
R
x
R
xR
y
yp
x
xp
R
xz
p
CX
p
CY
p
CX
d
=⋅
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+
2
2
2
2
1
1
,(34)
()()
RR
R
y
R
yR
y
yp
x
xp
R
yz
p
CY
p
CY
p
CX
d
=⋅
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
+
2
2
2
2
1
1
,(35)
where
are the intrinsic parameters
for the left camera and
are the
intrinsic parameters for the right one. The values of
these parameters are known because they were
computed in the calibration procedure. We solve
Eqs. (31) – (35), and compute x
LL
y
L
x
L
y
L
x
dCCpp ,,,,
RR
y
R
x
R
y
R
x
dCCpp ,,,,
S
, y
S
, and z
S,
, which
in fact is our goal.
For measuring purposes, we use the same device
as in the calibration procedure (see Figure 4). We
move the plate in different positions, and we
measure with the stereo sensor the 3D coordinates of
the points from the calibration plate. The big
advantage of this device is that we can control very
precisely the x, y, and z movements of the plate
(0.01 mm). This way, the accuracy of measurements
made with the calibrated stereo sensor can be
verified.
6 ANALYSIS OF THE
MESUREMENT RESULTS
According to Tsai (1987) and Weng (1992), there
are three ways to analyze the accuracy of the camera
calibration process. We use the first method from
their classification, which consists in analyzing the
accuracy of 3D measurements though stereo
triangulation.
We present three plots with the errors of the
measurement results. They present the errors
∆
x,
∆
y,
and
∆
z, obtained for each coordinate x, y and z.
We have measured 25 points situated in a plane.
In our plots, the coordinates x and y indicate the
position of the measured point in this plane, and the
coordinate z indicates step by step the four errors
presented before.
Figure 5.a shows the distribution of errors for the
x coordinate. The errors are between -19µm and
+24µm. Similarly, Figure 5.b shows the distribution
of errors for the y coordinate. These errors take
values between -16µm and +19µm. The errors for z
coordinate, which are between -78µm and +91µm,
are presented in Figure 5.c. Having obtained these
errors, we have reached our goal of building a stereo
sensor with the features described in the abstract.
STEREO VISION SENSOR FOR 3D MEASUREMENTS - A complete solution to produce, calibrate and to verify the
accuracy of the measurements results
415
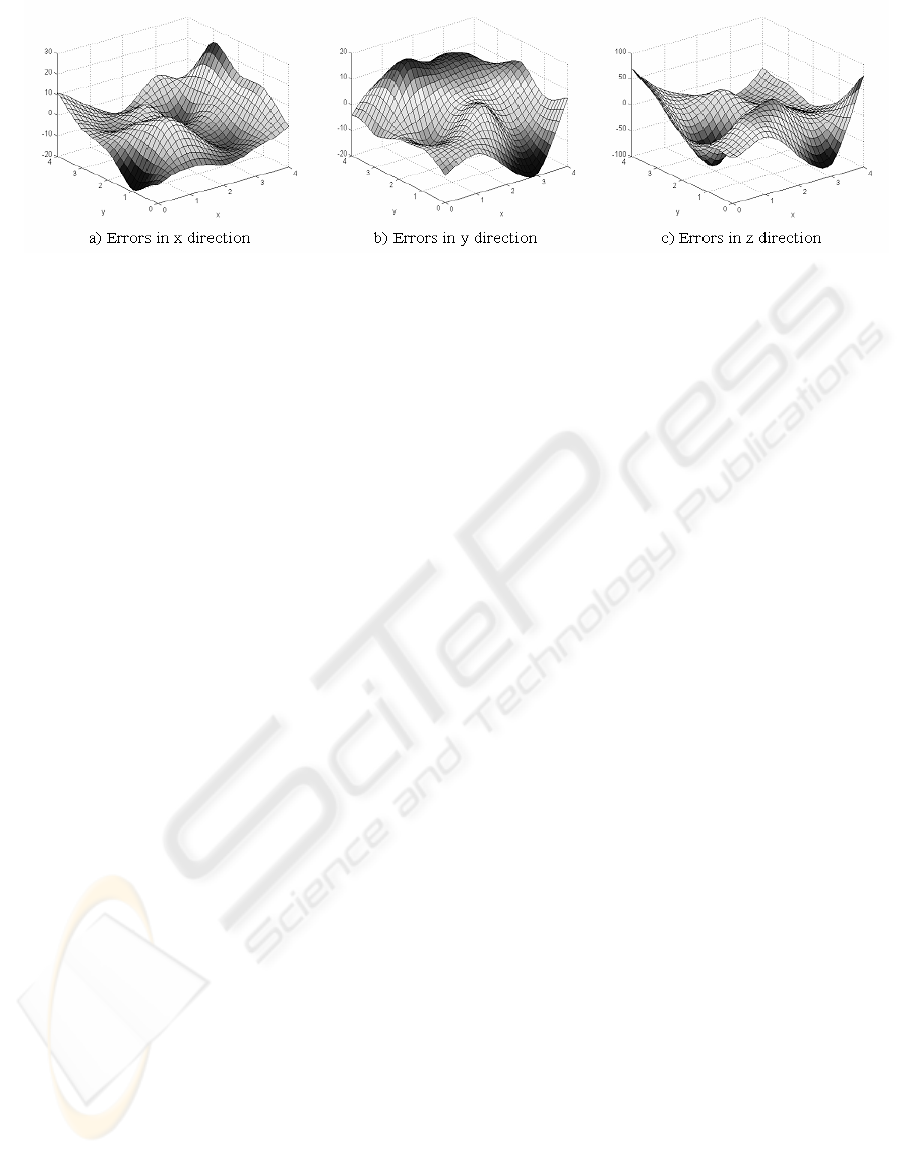
Figure 5: The error distribution for the measurement results
7 INDUSTRIAL APPLICATIONS
In industrial applications, a stereo sensor can be used
in two configurations: as a fixed sensor or, as a
mobile sensor mounted on the robot hand.
The first configuration can be employed in
measuring the angle between the axles of a vehicle
and the plane in which the wheels are rotating. The
accuracy in such applications has to be very high.
The solution developed in this paper, using a stereo
sensor, provides this high accuracy. It can replace
the current solution, which uses very expensive laser
devices.
The second configuration, mobile sensor, is
found useful in automatic processes, such as robotic
hands mounting of windows for passenger cars.
Here as well, this solution with a stereo sensor
mounted on the robot hand can replace, with better
results, the current solution. It needs only two
cameras instead of four or eight, which are needed
for the multi-camera method, which is presently
used.
8 CONCLUSIONS
One of the main conclusions of this paper is that in
order to obtain high accuracy and stable
measurement results with a stereo sensor, it is
necessary to include the radial distortion as a
parameter in the camera model, and to make the
image processing at sub-pixel level. We present in
details the reasons why we need a sub-pixel
approach. Furthermore, we develop an algorithm,
which detects the position of the edge, by using a
mathematical function to approximate the grey level
for those points situated in the edge vicinity. The
next step in the future research is to mathematically
model the fact that the optical axis is not orthogonal
to the CCD chip.
REFERENCES
Armangue, X. Salvi, J., Balle, J., 2000. A comparative
review of camera calibrating methods with accuracy
evaluation. V Ibero American Symposium on Pattern
Recognition.
Agapito, L., Hayman, E., Reid, I, 2001. Self-calibration of
rotating and zooming camera. Department of
Engineering Science, Oxford University
Faugeras, O., Toscani, G., 1986. The calibration problem
for stereo. Proceedings of IEEE Computer Vision and
Patern Recognition. pp. 15-20
Faugeras, O., 1993. Three dimensional computer vision.
Massachusetts Institute of Technology. London, 1993
Gui, V., 1999, Image Processing (in Romanian). Editura
Politechnica Timisoara, 1999
Hall, E., Tio, J., McPherson, C., Sadjadi, F., 1982.
Measuring curved surfaces for robot vision. Computer
Journal. vol. December, pp. 42-54
Landsberg, G. S., 1958. Optics (in Romanian). Editura
Technica Bucuresti, 2
nd
edition
Manusar, St., 1981. Numerical Methods to Solve Non-
liniar equations. Editura Technica Bucuresti, 1981
Naslau, P., 1999. Numerical Methods (in Romanian).
Editura Politechnica Timisoara, 1999
Parker, J. R., 1997. Algorithms for image processing and
computer vision. Copyright © 1997 by John Wiley &
Sons, Inc.
Paul, R., 1981. Robot Manipulators: Mathematics,
Programing and control. The MIT Press Cambridge,
Massachusetts. London, 1981
Tsai, R., 1987. A versatile camera calibration technique
for high accuracy 3D machine vision metrology using
off-the-shelf TV cameras and lenses. IEEE Int. Journal
on Robotics and Automation. pp.323-344
Weng, J., Cohen, P., Herniou, M., 1992. Camera
calibration with distortion models and accuracy
evaluation. IEEE Transactions on Pattern Analysis and
Machine Intelligence. vol 14, pp.965-980
ICINCO 2004 - ROBOTICS AND AUTOMATION
416
