
STEREOVISION APPROACH FOR OBSTACLE DETECTION ON
NON-PLANAR ROADS
Sergiu Nedevschi, Radu Danescu, Dan Frentiu, Tiberiu Marita, Florin Oniga, Ciprian Pocol
T.U. of Cluj-Napoca, Department of Computer Science
Rolf Schmidt, Thorsten Graf
Volkswagen AG, Group Research, Electronics
Keywords: Stereovision, non-flat road, road-obstacle separation, 3D points grouping, object detection, object tracking
Abstract: This paper presents a high accuracy stereovision system for obstacle detection and vehicle environment
perception in various driving scenarios. The system detects obstacles of all types, even at high distance,
outputting them as a list of cuboids having a position in 3D coordinates, size, speed and orientation. For
increasing the robustness of the obstacle detection the non-planar road model is considered. The
stereovision approach was considered to solve the road-obstacle separation problem. The vertical profile of
the road is obtained by fitting a first order clothoid curve on the stereo detected 3D road surface points. The
obtained vertical profile is used for a better road-obstacle separation process. By consequence the grouping
of the 3D points above the road in relevant objects is enhanced, and the accuracy of their positioning in the
driving environment is increased.
1 INTRODUCTION
Having a robust obstacle detection method is
essential for a precise 3D environment description in
driving assistance systems. The traditional approach
used to detect the position, size and speed of the
obstacles was the use of active sensors (radar, laser
scanner). However, recent developments in
computer hardware and also in image processing
techniques enable the possibility of employing
passive video cameras for detecting obstacles, with
the advantage of a higher level of the environment
description.
Obstacle detection through image processing has
followed two main trends: single-camera based
detection and two (or more) camera based detection
(stereovision based detection). The monocular
approach uses techniques such as object model
fitting (Gavrila, 2000), color or texture segmentation
(Ulrich, 2000), (Kalinke, 1998), symmetry axes
(
Kuehnle, 1998) etc. The estimation of 3D
characteristics is done after the detection stage, and
it is usually performed through a combination of
knowledge about the objects (such as size),
assumptions about the characteristics of the road
(such as flat road assumption) and knowledge about
the camera parameters available through calibration.
The stereovision-based approaches have the
advantage of directly measuring the 3D coordinates
of an image feature, this feature being anything from
a point to a complex structure. The main constraints
concerning stereovision applications are to minimize
the calibration and stereo-matching errors in order to
increase the measurements accuracy and to reduce
the complexity of stereo-correlation process. The
real time capability of the method is another
important constraint. Such a method was proposed
in (Nedevschi, 2004). The full 3D reconstruction of
the visible scene is performed only on vertical or
oblique edges. The list of obtained 3D points is
grouped into objects based solely on density and
vicinity criteria. The flat road assumption for the
ground-obstacle points separation process was used.
The system detects obstacles of all types, outputting
them as a list of cuboids having 3D positions and
sizes. The detected objects are then tracked using a
multiple object-tracking algorithm, which refines the
grouping and positioning, and detects the speed and
orientation.
11
Nedevschi S., Danescu R., Frentiu D., Marita T., Oniga F., Pocol C., Schmidt R. and Graf T. (2004).
STEREOVISION APPROACH FOR OBSTACLE DETECTION ON NON-PLANAR ROADS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 11-18
DOI: 10.5220/0001139300110018
Copyright
c
SciTePress

An important part in the obstacle detection
process is the separation of the obstacle points from
the road points. Most of the roadway obstacle
detection methods are based on the flat road
assumption (Weber, 1995), (Williamson, 1998). This
is a poor model since deviations from the flat road
may be as large as or larger than the obstacles we
wish to detect. In consequence the road objects
separation and the 3D objects position estimation
cannot be done. Therefore the non-flat road
assumption is compulsory for a robust object
detection method. In literature this assumption was
introduced by non-flat road approximation by series
of planar surface sections (Hancock, 1997),
(Labayrade, 2002) or by modeling of the non-flat
roads by higher order surfaces (Goldbeck, 1999),
(Aufrere, 2001). For instance the methods presented
in (Aufrere, 2001), (Aufrere, 2000), (Takahashi,
1996) are fitting the parameters of a 3D clothoid
model of the road lane using a monocular image and
supplementary lane geometry constraints.
Our approach presented in this paper will model
the vertical profile of the road surface with such a
clothoid curve fitted directly on the detected 3D road
surface points. These 3D road points are detected
using a high accuracy stereovision method
(Nedevschi, 2004). The obtained vertical profile will
be used for the road-obstacle separation process in
order to have a proper grouping of the 3D points in
obstacles and precise estimation of their 3D position
in the driving environment.
2 ENVIRONMENT MODEL
All 3D entities (points, objects) are expressed in the
world coordinates system, which is depicted in
figure 1.a. This coordinates system, has its origin on
the ground in front of the car, the X axis is always
perpendicular on the driving heading direction, the
Y axes is perpendicular on the road surface and the
Z axis coincides with the driving heading direction.
The ego-car coordinates system has its origin in the
middle of the car front axis, and the tree coordinates
are parallel with the tree main axes of the car. The
world coordinates system is moving along with the
car and thus only a longitudinal and a vertical offset
between the origins of the two coordinates system
exists (vector T
EW
from Figure 1). The relative
orientation of the two coordinates systems (R
EW
rotation matrix) will change due to static and
dynamic factors. The loading of the car is a static
factor. Acceleration, deceleration and steering are
dynamic factors, which also cause the car to change
pitch and roll angles with respect to the road surface.
To obtain the pitch and roll angles and the car height
we measure the distance between the car’s chassis
and wheels because the wheels are on the road
surface. Four sensors are mounted between the
chassis and wheels arms and the car height (T
X
) and
the pitch(R
X
) and roll (R
Z
) angles are computed.
Figure 1.a shows also the position of the left and
the right cameras in the ego-car coordinate system.
The position is completely determined by the
translation vectors T
CE
i
and the rotation matrices
R
CE
i
. These parameters are essential for the stereo
reconstruction process and for the epipolar line
computation procedure. In order to estimate them an
offline camera calibration procedure is performed
after the cameras are mounted and fixed on the car
using a general-purpose calibration technique. Due
to the rigid mounting of the stereo system inside the
car these parameters are considered to be
unchangeable during driving.
The stereo reconstruction is performed in the car
coordinates system. The coordinates XX
E
=[X
E
, Y
E
,
Z
E
]
T
of the reconstructed 3D points in the ego-car
coordinates system can be expressed in the world
coordinate system as XX
W
=[X
W
, Y
W
, Z
W
]
T
using
the following updating equation:
)(
EWEW
TXXRXX +⋅=
EW
(1)
where T
EW
and R
EW
are the instantaneous relative
position and orientations of the two coordinates
system and are computed from the damper height
sensors by adding an offset to the initial value
(established during camera calibration). The
transformation between the rotation vector and its
corresponding rotation matrix is given by the
Rodrigues (Trucco, 1998) formulas.
)(
],0,[
],,0[
00
00
EWEW
ZXEWEWEWEW
YEWEWEWEW
Rodrigues
const
rR
RRrrrr
TTTTT
=
+=+=
+=+=
δδδ
δδ
(2)
The objects are represented as cuboids, having a
position (in the world coordinate system), size,
orientation and velocity, as in figure 1.b. The
position (X, Y, Z) and velocity (v
X
and v
Z
) are
expressed for the central lower point C of the object.
ICINCO 2004 - ROBOTICS AND AUTOMATION
12

a
.
a. b.
Figure 1: a. The world, car and cameras reference systems; b. The object parameters
3 STEREO RECONSTRUCTION
The stereo reconstruction algorithm that is used is
mainly based on the classical stereovision principles
available in the existing literature (Trucco, 1998):
find pairs of left-right correspondent points and map
them into the 3D world using the stereo system
geometry determined by calibration.
Constraints, concerning real-time response of the
system and high confidence of the reconstructed
points, must be used. In order to reduce the search
space and to emphasize the structure of the objects,
only edge points of the left image are correlated to
the right image points. Due to the cameras horizontal
disparity, a gradient-based vertical edge detector was
implemented. Non-maxima suppression and
hysteresis edge linking are being used. By focusing
to the image edges, not only the response time is
improved, but also the correlation task is easier,
since these points are placed in non-uniform image
areas.
Area based correlation is used. For each left edge
point, the right image correspondent is searched. The
sum of absolute differences (SAD) function
(Williamson, 1998) is used as a measure of
similarity, applied on a local neighborhood (5x5 or
7x7 pixels). Parallel processing features of the
processor are used to implement this function. The
search is performed along the epipolar line
computed from the stereo geometry for general
camera configuration.
To have a low rate of false pairs, only strong
responses of the correlation function are considered
as correspondents. If the global minimum of the
function is not strong enough relative to other local
minimums than the current left image point is not
correlated. In figure 2 a successful correlation is
shown along the first column, while the last two
columns show ambiguous similarity functions with
rejected correspondents. Repetitive patterns are
rejected and only robust pairs are reconstructed.
Figure 2: Three correlation scenarios are shown on each
column. Left image point marked by ‘x’ on row I, right
image search area and the epipolar line on row II and the
correlation function on row III.
A parabola is fitted to a local neighborhood (3 or
5 points) of the global correlation minimum in order
to detect the stereo correspondence with sub-pixel
accuracy. The obtained accuracy is about 1/4 to 1/6
and is dependent of the image quality (especially
noise level and contrast). Our tests proved that the 3-
neighbors parabola works better than the other one.
After this step of finding correspondences, each
left-right pair of points is mapped into a unique 3D
point. Two 3D projection rays are traced, using the
camera geometry, one for each point of the pair. By
computing the intersection of the two projection
rays, the coordinates of the 3D point are determined.
STEREOVISION APPROACH FOR OBSTACLE DETECTION ON NON-PLANAR ROADS
13

4 VERTICAL ROAD PROFILE
ESTIMATION
Many of the obstacle detection methods assume a
flat road profile. Some take into account the car
pitching – therefore admitting some degree of
vertical profile change – but fail to account for a
possible curved vertical profile. We’ll try to extract
the vertical profile of the road by approximating it
with a first order clothoid curve (in the ego-car
coordinate system):
62
3
,1
2
,0
E
v
E
vEE
Z
c
Z
cZY ++−=
α
(3)
where:
α
, is the pitch angle of the ego-car
c
0,y
– vertical curvature
c
1,y
– variation of the vertical curvature
In order to extract the coefficients α, c
0,v
and c
1,v
which will completely describe the vertical profile of
the road, we’ll make use of the 3D road points
reconstructed by stereovision. The main advantage
of using stereovision is the ability of directly
extracting the vertical profile, independently of the
lane detection process, sometimes even
independently of the presence of any kind of
delimiters. The key assumption, which makes this
possible, is that there are none or very few 3D points
under the road plane. Having a list of 3D points, it is
easy to obtain a lateral projection in the YOZ plane,
like in figure 3.
As easily can be seen, there is a lot of noise in
the set of points, and therefore a simple fitting of the
curve to the lower points, or a least-square clothoid
fitting is not enough. Our approach to detecting the
vertical profile takes two simplifying assumptions:
- In the close vicinity of the ego-vehicle (20m), the
points are on a straight line, and the effect of the
curvature is sensed only after the 20m interval
- The effect of roll is negligible for the vertical
profile detection, that is, the vertical
displacement due to roll is negligible in
comparison to the displacement due to pitch and
vertical curvature.
These assumptions allow us to regard the
problem as a 2D curve fitting to a set of 2D points
corresponding to the lateral projection of the
reconstructed 3D points (figure 3).
With these assumptions, first we want to estimate
the pitch angle of the ego car coordinate system
relative to the road surface (angle α from equation
3). The pitch angle is extracted using a method
similar to the Hough transform applied on the lateral
projection of the 3D points in the near range of 0-20
m (in which we consider the road flat). Therefore, an
angle histogram is built for each possible pitch
angle, using the near points, and then the histogram
is searched from under the road upwards. The first
angle having a considerable amount of points
aligned to it is taken as the pitch angle.
After detecting the pitch angle, detection of the
curvature follows the same pattern. The pitch angle
is considered known, and then a curvature histogram
is built, for each possible curvature, but this time
only the more distant 3D points (> 20 m) are taken
into account, because the effect of a curvature is felt
only in more distant points. The obtained vertical
clothoid profile of the road is shown in figure 4.
Figure 3: The 3D points in a lateral projection (YOZ plane)
Figure 4: The vertical profile fitted to the ground points
ICINCO 2004 - ROBOTICS AND AUTOMATION
14

5 GROUPING 3D POINTS INTO
OBJECTS
We use only 3D points situated above the road
surface. The road surface is modeled by the
following clothoid equation in the world coordinates
system:
62
3
,1
2
,0
Z
c
Z
cY
vv
+=
(4)
The road/obstacle separation (figure 5) of the 3D
points is done using thee following constraints:
− if |Y
W
-Y| <
τ
, the point is on the road
surface, and classified as road point
− if (Y
W
-Y) < -
τ
, the point is below the road,
and is rejected
− if (Y
W
-Y) >
τ
, the point is above the road
The threshold
τ
is a positive constant and its
value is chosen depending on the on the error
estimation of the disparity with the depth, and on the
error estimation of the clothoid parameters and
possible torsion of the road.
Figure 5: Lateral view of the road surface in the world
coordinate system
Some supplementary constraints are used to
restrict the 3D points above the road: points higher
then 4m above the road surface, points that are too
lateral or too far are rejected. The remaining points
belong to the so-called Space of Interest (SOI) in
which is performed the grouping of the 3D points in
objects. For the road geometry we have made the
following assumptions: in highway and most of
country road scenarios the horizontal curvature is
slowly changing and the torsions can be neglected in
our detection range (up to 100m). Therefore
knowing the road vertical profile would be enough
to characterize the driving surface in the SOI.
In our SOI, no object is placed above other. Thus,
on a satellite view of the 3D points in SOI, we are
able to distinguish regions with high points density,
representing and locating objects. Regions with low
density are assumed to contain noisy points and are
neglected. The satellite view (figure 6.b) of the 3D
points detected from the scene depicted in figure 6.a
is analyzed to identify objects.
An important observation is that the 3D points are
more and more rare as the distance grows. To
overcome this phenomenon, we compress the
satellite view of the space (Nedevschi, 2004),
depending on distance, in such a way that local
density of points, in the new space, is kept constant
(figure 6.c. Regardless the distance to an object, in
the compressed space, the region where that object is
located will have the same points density. The
objects are identified as dense regions (figure 6.c).
In figure 6.d the cuboids circumscribing objects are
shown.
Figure 6: a. Reconstructed scene; b. Satellite view of
points. c. The compressed space and the identified objects;
d. Perspective view of object cuboids painted over the
image
STEREOVISION APPROACH FOR OBSTACLE DETECTION ON NON-PLANAR ROADS
15

6 OBJECT TRACKING
Object tracking is used in order to obtain more stable
results, and also to estimate the velocity of an object
along the axes X and Z. The Y coordinate is tracked
separately, using a simplified approach of simply
averaging the current coordinate by the last detected
coordinate.
The mathematical support of object tracking is
the linear Kalman filter. The position of the object is
considered to be in a uniform motion, with constant
velocity. The position and speed parameters of the
object along the axes X, Y and Z at the moment k
are components of the state vector X(k) that we try
to evaluate through the tracking process. The actual
detection of the object will form the measurement
vector Y(k), which consists only of the coordinates
of the detected object.
[]
T
zYx
kvkvkvkzkykxk )()()()()()()( =X
(5)
The evolution of the X vector is expressed by the
linear equation:
)1()()( −
×
= kkk XAX
(6)
where the state transition matrix A(k) is
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
∆
∆
∆
=
100000
010000
001000
00100
00010
00001
t
t
t
A
(7)
The steps of tracking a single object are:
Prediction: a new position of the object is computed
using the last state vector and the transition matrix,
through equation (6).
Measurement: around the predicted position (pX
,pY, pZ) we search for objects resulted from
grouping which have the distance to the
prediction below a threshold. The distance is
computed by equation (8), which gives different
weights to displacements along the three
coordinate axes, and take into consideration also
the current object speed, which is seen as an
indetermination factor.
3
5.0
7.0
3
2),,(
z
x
v
pZz
pYy
v
pXxzyxD
−−+
−+−−=
(8)
The objects that satisfy the vicinity condition
are used to form an envelope whose position is
computed and used as measurement, and the
size of the envelope is used as the current
measurement of the tracked object’s size. By
creating an envelope object out of the objects
near a track we can join objects that were
previously detected as separate. This merging
becomes effective only if the separated objects
have the same trajectory. This is ensured by the
object-track association, when track compete
for objects, and a false object joining won’t last
for too long.
Update: The measurement and the prediction are
used to update the state vector X through the
equations of the Kalman filter. The Y coordinate
and the object’s size are tracked by averaging the
current measurement with the past
measurements. If in the current frame there is no
measurement that can be associated to the track,
the prediction is used as output of the tracking
system. The track is considered lost after a
number of frames without measurement.
Tracking multiple objects adds a little bit more
complexity to the algorithm presented above. We
have to decide which detected object belongs to
which track, or if a detected object starts a new
track. The association between detected objects and
tracks is done using a modified nearest-neighbor
method, using the distance expressed by equation
(8). Each object is compared against each track. The
objects are labeled employing the nearest track
identity number, provided that there is at least one
track that has a sufficient low distance to the object.
The modification from the classical nearest-neighbor
scheme is that we introduce an “age discount” in the
distance comparison, and in this way we give
priority to the older, more established tracks. This
discounting mechanism is achieved by sorting the
tracks in the reverse order of their age (the older
ones first). If we compare an object to a track and
the object already was labeled with the label of
another track, we change the owner of the object
only if the distance object-current track is lower than
the distance to the older track minus a fixed
quantity, the age discount.
For every object that cannot be assigned to an
existing track and that fulfills some specific
conditions, a new track is initialized. A new track is
ICINCO 2004 - ROBOTICS AND AUTOMATION
16

started for a single object that has a reasonable size.
There is no object joining in the initialization phase
of a track. In this way we avoid initializing tracks to
noise objects, and thus amplifying the noise. Tracks
are aborted if the association process fails for a
predefined number of frames. A tracking validation
process based on the image of the object is
employed in order to ensure that there is no track
switching from one object to another.
7 RESULTS
The detection system has been deployed on a
standard 1 GHz Pentium® III personal computer,
and the whole processing cycle takes less than 100
ms processing time, therefore securing a 10 fps
detection rate. This makes the system suitable for
real-time applications. The system has been tested in
various traffic scenarios, both offline (using stored
sequences) and online (on-board processing), and
acted well in both conditions. In all situations the
obstacles were reliably detected and tracked, and
their position, size and velocity measured. The
detection has proven to have a maximum working
range of about 90 m, with maximum of reliability in
the range 10-60 m. The depth measurement error is,
naturally, higher than one can obtain from a radar
system, but it is very low for a vision system: less
than 10 cm of error at 10 m, about 30 cm of error at
45 m and about 2 m of error at 95 m.
In figure 7 the detection results on a non-flat
road are outlined. The scene from figure 6.a is at the
end of a concave slope. The detected road surface
has a concave vertical curvature
c
0,v
≈ 2e
-4
. The far
objects (the two cars at 71m, respectively 81m and
the traffic sign from 91m have vertical offsets in the
world coordinates system (having the XOZ plane
coincident with the road surface below the current
car position) of 0.51m, 0.66m and 0.96m
respectively, due to the non flat road. But using the
non-flat road modeled by a vertical clothoid (figure
6.b) the objects are detected correctly on the road
surface.
8 CONCLUSIONS
We have presented a stereovision-based obstacle
detection system that reconstructs and works on 3D
points corresponding to the object edges, in a large
variety of traffic scenarios, and under real-time
constraints. Because the stereovision module
reconstructs any feature in sight (that means also the
road features) the vertical profile of the road was
detected. This way a correct road-obstacle separation
was possible. The grouping of the 3D points in
relevant objects was greatly improved, and the
objects 3D positioning accuracy was increased.
The functions of this system can be greatly
extended in the future. An intelligent correlation
function should be developed, one that can
disambiguate, not reject, repetitive patterns and
reconstruct points from horizontal edges. Moreover,
because any type of object is detected this algorithm
can form the basis for any type of specific object
detection system, such as vehicle detection,
pedestrian detection, or even traffic sign detection.
The classification routines can be performed directly
on our detected objects, with the advantage of
reduced search space and additional helpful
information such as distance, size and speed, which
can also reduce the class hypotheses. The vertical
road profile detection from stereovision can be the
base for a 3D lane detection algorithm, which will
give a complete 3D description of the driving
environment in a lane related coordinates system.
STEREOVISION APPROACH FOR OBSTACLE DETECTION ON NON-PLANAR ROADS
17
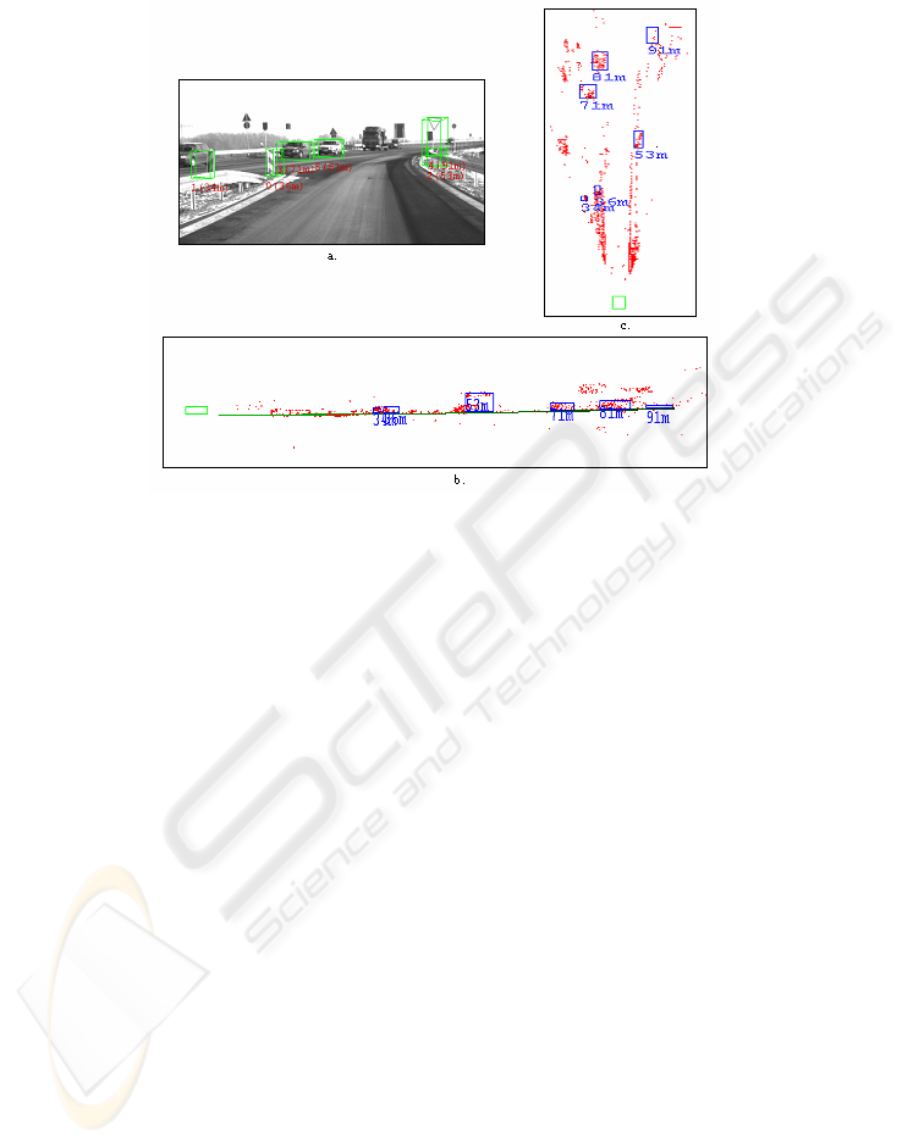
Figure 7: a. Image of the scene with the detected object (cuboids with ID and distance); b. Side view of the detected objects
and the detected road surface; c. Top view of the detected objects.
REFERENCES
Gavrila, D. M, 2000. Pedestrian Detection from a Moving
Vehicle. In Proc. of European Conference on
Computer Vision, Dublin, Ireland, 2000, pp. 37-49
Ulrich, I, Nourbakhsh, I, 2000. Appearance-Based
Obstacle Detection with Monocular Color Vision. In
Proc. of the AAAI National Conference on Artificial
Intelligence, Austin, TX.
Kalinke, T, Tzomakas, C, von Seelen, W, 1998. A Texture
based Object Detection and an Adaptive Model-based
Classification. In Procs. IEEE Intelligent Vehicles
Symposium‘98, (Stuttgart, Germany), pp. 341–346.
Kuehnle, A, 1998. Symmetry-based vehicle location for
AHS. In Procs. SPIE Transportation Sensors and
Controls: Collision Avoidance, Traffic Management,
and ITS, vol. 2902, (Orlando, FL), pp. 19–27.
Nedevschi, S, Schmidt, R., Graf, T, Danescu, R, Frentiu,
D, Marita, T, Oniga, F, Pocol, C, 2004. High Accuracy
Stereo Vision System for Far Distance Obstacle
Detection. In IEEE Intelligent Vehicles Symposium
‘04, Parma, Italy.
Weber, J, Koller, T, Luong, Q.-T, Malik, J, 1995. An
integrated stereo-based approach to automatic vehicle
guidance. In Fifth International Conference on
Computer Vision, In Collision Avoidance and
Automated Traffic Management Sensors, Proc. SPIE
2592.
Williamson, T. A, 1998. A high-performance stereo vision
system for obstacle detection. PhD Thesis CMU-RI-
TR-98-24, Robotics Institute Carnegie Mellon
University, Pittsburg, September.
Hancock, J, 1997. High-Speed Obstacle Detection for
Automated Highway Applications. Tech. Report
CMU-RI-TR-97-17, Robotics Institute, Carnegie
Mellon University, Pittsburg.
Labayrade, R, Aubert, D, Tarel, J P, 2002. Real Time
Obstacle Detection in Stereovision on Non Flat Road
Geometry Through V-disparity Representation. In
Proceedings of IEEE Intelligent Vehicle Symposium,
IV ’02), Versailles, France.
Goldbeck, J, Huertgen, B, 1999. Lane Detection and
Tracking by Video Sensors. In IEEE International
Conference on Intelligent Transportation Systems
(ITSC 99).
Aufrere, R, Chapuis, R, Chausse, F, 2001. A model-driven
approach for real-time road recognition. In Machine
Vision and Applications, Springer-Verlag.
Aufrere, R, Chapuis, R, Chausse, F, 2000. A fast and
robust vision-based road following algorithm. In
IEEE-Intelligent Vehicles Symposium 2000, pp.192-
197.
Takahashi, A, Ninomiya, Y, 1996. Model-based lane
recognition. In Proceedings of the IEEE Intelligent
Vehicles Symposium 1996, pp. 201–206.
Trucco, E, Verri, A, 1998. Introductory Techniques for 3D
Computer Vision. Prentice-Hall, New Jersey.
ICINCO 2004 - ROBOTICS AND AUTOMATION
18
