
A PRO-ACTIVE RESOLVER MODEL TO COPE WITH
PARAMETER VARIABILITY IN THE
MANUFACTURING CHAIN
João Figueiredo
Universidade de Évora,R. Romão Ramalho, 59, 7000 Évora, Portugal
José Sá da Costa
Instituto Superior Técnico, Av. Rovisco Pais, 1049-001 Lisboa, Portugal
Keywords: Modeling, Simulation, Instrumentation
, Rotation Sensors, Synchros, Resolvers
Abstract: In this paper a linearized model for Pancake resolvers is developed with the aim of compensating deviations
on manufacturin
g inputs through computed corrections on the production controllable variables, mainly
winding parameters. This model follows a two-step strategy where at the first step an accurate model
computes the resolver nominal conditions and at a second step a linearized model based on production
controllable variables computes the corrections on these controllable variables in order to compensate small
deviations on the nominal conditions due to processes variability in the manufacturing. This model had been
simulated and experimentally tested in a Siemens resolver manufacturing plant. The tests done proved the
efficiency of the developed model and its usefulness in stabilizing the product specifications in a dynamic
environment with high variability of manufacturing processes.
1 INTRODUCTION
Resolvers are nowadays widely spread in Industrial
Applications (Logé, 1992). These electromagnetical
devices which were, in the past, largely used in
military applications, namely to control the position
stability of heavy guns, are presently very common
in industrial areas as a servomotor component
(Golker, 1981). Servomotors are today widely
spread in robotics, rotary machinery, aeronautics…
This continuing demand on resolvers pushes the
researc
h on new materials, new designs supported
by theoretical work. Continuing research on old
products is managed by the market. Similar research
is done also on other old electromagnetical devices
which improvements are demanded by the market
(Ostolaza, 2002; Chang, 2003; Lin 2003).
The main factors that promote the widespread of
t
he Resolvers as angular sensors in despite of
optoelectronics-encoders are its robustness and
stable accuracy in non-friendly environments such
as mechanical vibrations and shocks, environments
with dust, oil, radiations and very high stability in a
wide range of temperatures (-50º C to +150º C) and
rotational velocities (1000 to 10000 turns/min.).
The main disadvantages of resolvers in relation
to opt
oelectronic encoders are: the necessity of an
AC-power source and the delivery of an analog
output signal where the today’s processing devices
are mainly digital. However, the daily advances in
the signal processing technology allows more and
more speedy and cost efficient solutions to convert
analog to digital signals.
The main functional characteristics of resolvers
are: the angula
r error, the output voltage
(transformation ratio –ü), the phase shift and the
input current. All these important factors specified
by customers/ applications - usually referred as
Customer characteristics - are strongly influenced by
constructive factors such as: magnetic properties of
stators and rotors, winding geometries,
manufacturing tolerances of mechanical parts. As
the assembly factors change continuously in a
manufacturing plant (new material charge, different
thermal treatment of magnetic metals…) it means
that small adjustments at the windings parameters
have to be made in order to compensate the existing
38
Figueiredo J. and Sá da Costa J. (2004).
A PRO-ACTIVE RESOLVER MODEL TO COPE WITH PARAMETER VARIABILITY IN THE MANUFACTURING CHAIN.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 38-45
DOI: 10.5220/0001140000380045
Copyright
c
SciTePress

variability in the manufacturing process allowed by
its tolerance chain.
Facing this situation it is clear that the existence
of a mathematical model at the resolver
manufacturer that allows him to compensate the
variability of its processes by computing the
corrections at the windings parameters in order to
keep the customer specifications on target, saves
him, yearly, a big amount of money by drastically
reducing the number of trials needed, with different
windings, until the customer characteristics are met
again.
In this paper an inovative linearized
mathematical model for Pancake-Resolvers (fig. 1)
is developed in a way that it fits the needs of a
resolver manufacturer to stabilize its product
specifications in an environment with high
variability of manufacturing processes.
2 PANCAKE-RESOLVER MODEL
2.1 Description
The Pancake resolver is today the most common
resolver design for industry and aeronautics (fig. 1).
The Pancake resolver carries the current into the
rotor through a transformer that is located at the
stator edge. The advantage of such design, over the
traditional resolver with collector system, is the
absence of the relative movement between
mechanical parts which causes wear, vibrations and
sound.
Fig. 1 presented the two above mentioned
designs.
Independently of how the energy is brought into
the resolver rotor, the function of a resolver can be
briefly illustrated in figure 2.
Resolver function schematics
Resolver input and output voltages
Figure 2: Resolver schematics and function
With an appropriate composition of the output
voltages, the angular position of the rotor referred to
the stator position can be obtained [2] as:
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
=
S1S3
S2S4
1-
0
0
1-
U
U
tg
α cosU
αsin U
tgα
u
u
&&
&&
(1)
Where:
ü = transformation ratio;
α = relative angle rotor to stator;
U
0
= input voltage.
S1
S3
α
R1
U
S1S3
=
U
cos
U
0
S2
R2
U
S2S4
=
U
sin
Roto
r
S4
Stato
r
Pancake resolver
Traditional resolver with collector
Figure 1: Traditional and Pancake resolvers
A PRO-ACTIVE RESOLVER MODEL TO COPE WITH PARAMETER VARIABILITY IN THE MANUFACTURING
CHAIN
39
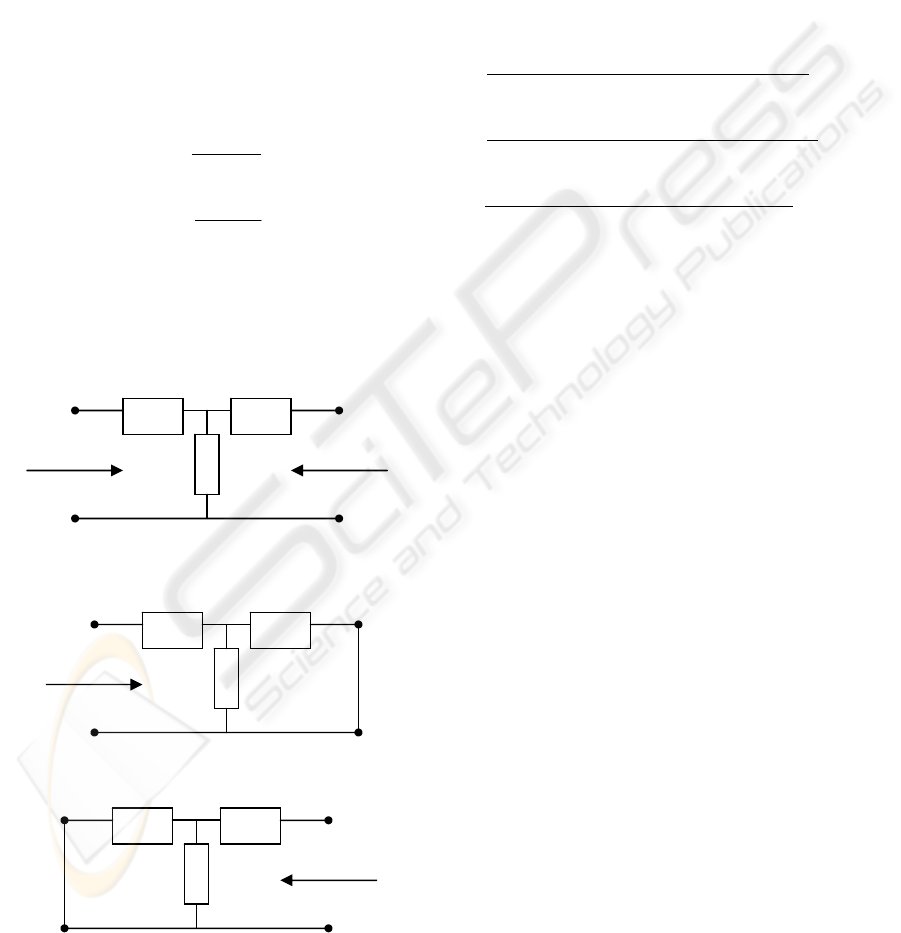
2.2 Mathematical Model
The common used mathematical model for a
resolver is shown in fig. 3, and it is the typical model
for a transformer.
This model is suitable to supply the usual
customer demanded electrical characteristics of the
resolver, namely the Rotor and Stator Impedances
(open and short circuited).
According the below schematics, using the
traditional circuit analysis methods, the following
equations are obtained:
; (2)
31ro
ZZZ +=
; (3)
32so
ZZZ +=
32
32
1rs
ZZ
ZZ
ZZ
+
+=
; (4)
31
31
2ss
ZZ
ZZ
ZZ
+
+=
; (5)
Where:
Zro = Rotor Impedance with Stator open
Zso = Stator Impedance with Rotor open
Zrs = Rotor Impedance with Stator shorted
Zss = Stator Impedance with Rotor shorted
Rotor Impedance with Stator open (Zro) and
Stator Impedance with Rotor open (Zso)
Rotor Impedance with Stator shorted (Zrs)
Stator Impedance with Rotor shorted (Zss)
Figure 3: Common used resolver models
This model although useful for computing the
main electrical characteristics for customer needs is
from less use for the sensors manufacturer. Actually
this model doesn’t copy with anyone of the directly
controllable variables in a resolver manufacture.
The new model proposed in this paper is
appropriate for resolver manufacturers because it
deals explicitly with the actually controllable
variables in a resolver production plant (mainly
winding parameters).
The main variables that influence directly the
customer specific electrical characteristics can be
divided into 3 groups:
Group 1: Material related variables: magnetic
permeability of the rotor, the stator, the rotor-
-transformer, the stator-transformer.
Group 2: Geometry related variables: stator
dimensional tolerances, rotor dimensional
tolerances, rotor/stator air-gap, transformer air-gap.
Group 3: windings related variables: windings
distribution around the rotor and the stator, number
of stator-windings, stator-windings wire diameter,
number of rotor-windings, rotor-windings wire
diameter, number of stator/transformer-windings,
stator/transformer-windings wire diameter, number
of rotor/transformer-windings, rotor/transformer-
windings wire diameter.
From this 3 groups of variables, the resolver
manufacturer can only influence on a feasible way
the 3
rd
variables Group, since the other groups are
usually fixed for the sensor manufacturer as he buys
the materials and parts from external suppliers. Even
if the resolver manufacturer is vertically integrated,
producing also its parts, what is very unusual, the
parts production pace and environment is completely
apart from the resolver assembly line, this implies
that, for having its parts, the assembly line has to
deal always with stock management (the assembly
line can never control the groups 1 and 2 related
variables).
Z
1
Z
2
In such a scenario a useful resolver mathematical
model for a resolver manufacturer must deal
explicitly with the Group 3 Variables.
In Figueiredo, 2004, an explicit mathematical
model for Pancake resolvers was proposed. This
model although very accurate has its major
application on the design of new products. For
manufacturing purposes where the main needs are
the compensation of the processes variability that
affect the product characteristics and increase the
scrap, that model has less application. In fact, those
model variables cannot be directly used by the
resolver manufacturer, as they account for the
standard physical effects of an electromagnetic
device (transformer ohmic resistances, indutances,
electromagnetic losses in windings and metal…).
These standard electromagnetic variables are very
Z
3
Z
R0
Z
S0
Roto
r
Stato
r
Z
1
Z
2
Z
3
Z
RS
Z
1
Z
2
Z
3
Z
SS
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
40

useful for design purposes but they are not suitable
for the resolver steady production as here the
controllable variables are only the winding
parameters (number of windings and wire
diameters).
The model developed in this paper follows a
two-step strategy where at first an accurate model
defines the resolver nominal conditions and at a
second step an additional linearized model (with
production controllable variables) compensates the
product for small changes on the manufacturing
processes.
Analogous to the mathematical methodology of
function expansion into a Taylor series, here also the
strategy adopted is to consider the model developed
by Figueiredo (Figueiredo, 2004) to compute the
system nominal values – f(x0) – and additionally a
linearized model dependent on production
controllable variables which computes the function
increments. These increments are able to cancel the
deviations on the standard parameters due to the
variability of the production processes in a resolver
manufacturer. The incremental model that is
developed in this paper is an innovative approach
based on experimental parameter identification.
2.2.1 Model for nominal conditions – [f(x
0
)]
Analysing the Pancake resolver functionally we can
split this device into two transformers associated in
series. The first one, the transformer which carries
on the energy into the rotor, which output voltage is
independent from the rotor position related to the
stator, and the resolver function itself that can be
modeled as a transformer which output voltage is
dependent on the rotor to stator position (see fig 4).
Figure 4: Pancake resolver schematics
The explicit mathematical model, proposed by
Figueiredo (Figueiredo, 2004), for the main
customer electrical characteristics: Output voltage
for each stator winding (Ucos, Usin) and Input
current (I), is shown in the eqs. 6 and 7.
This model proved to be very accurate in the
simulation of pancake resolvers (Figueiredo, 2004).
0
31
3
DT
S1S3
U
AA
A
uu
1
U
+
=
&&&&
(6)
0
31
4
U
AA
A
I
+
=
(7)
where:
ü
T
= transformation ratio from Transformer
ü
D
= transformation ratio from Sensor
(
)
2
hTDFehTTFe3
SLRLRA
′′
=
()
[
]
++
′
+++=
′′
3
hTTFeD1σT2σhDT1σT1
4
σT11
SLRLLLaRbLaSLA
(
)
[
+
′
+
′
′
+
+
+
D1T2hTTFehDT1σT1
RRLRLbRcL
(
)
][
++++
′
+
′′
cRdLSLLLRR
T1σT1
2
D1σT2σhTTFeDFe
(
)
]
dRSRRLRR
T1D1T2hTTFeDFe
+
′
+
′
′
+
d cSbSaSA
23
4
+++=
(
)
D1σT2σhThD
LLLLa
′′
+
′
=
(
)
(
)
[
]
++
+
′
+
′
′
=
′′
D1σT2σTFeD1T2hThD
LLRRRLLb
(
)
hDhTDFehDhTTFeD1σT2σhTDFe
LLRLLRLLLR
′
′
+
′
+
+
′
+
′′
(
)
+
′
′
+
′
+
′
+
′
′
=
hDTFeDFehTTFeDFeD1T2TFehD
LRRLRRRRRLc
(
)
(
)
[
]
D1σT2σTFeD1T2hTDFe
LLRRRL
′′
+
+
′
+
′
′
+
R
(
)
D1T2TFeDFe
RRRRd
′
+
′
′
=
where:
R
T1
= primary winding resistance -Transformer
R’
T2
= secondary winding resistance - Transformer
R
TFe
= magnetic metal resistance - Transformer
L
σT1
= primary winding leakage inductance - Transformer
L
σ’T2
= secondary winding leakage inductance -
Transformer
L
hT
= common flux inductance – Transformer
R
D1
= primary winding resistance -Sensor
R’
D2
= secondary winding resistance - Sensor
R
DFe
= magnetic metal resistance - Sensor
L
σD1
= primary winding leakage inductance - Sensor
L
σ’D2
= secondary winding leakage inductance - Sensor
L
hD
= common flux inductance – Sensor
A PRO-ACTIVE RESOLVER MODEL TO COPE WITH PARAMETER VARIABILITY IN THE MANUFACTURING
CHAIN
41
The above model will be taken to compute the
resolver nominal design variables (the standards for
all product variables - f(x0) - ). To compute the
influences on the resolver main functional
characteristics: output voltage (Ucos, Usin) and
input current (I) caused by small changes due to
production processes variability, a differential
model, that copies with the marginal changes on the
controllable variables, is developed, in this paper, on
sec. 2.2.2.
2.2.2 Incremental Model – [(∂f/∂x
i
)
0
(∆x
i
)]
Having a general function f in R
n
[f(x
1
,x
2
,…,x
n
)] this
function can be linearized around the point
(x
10
,x
20
,…,x
n0
) by cutting its Taylor’s series
development after the 1
st
order partial derivatives:
()(
+=
n02010n21
x,...,x,xfx,...,x,xf
)
() ()
n0n
0
n
101
0
1
xx
x
f
xx
x
f
−
∂
∂
++−
∂
∂
+ K
(8)
This approach is used to compute the influences
on the resolver main functional characteristics:
output voltage (Ucos, Usin) and input current (I)
caused by small changes on the controllable
variables.
The production controllable variables for an
usual resolver manufacturer are essentially the
windings parameters.
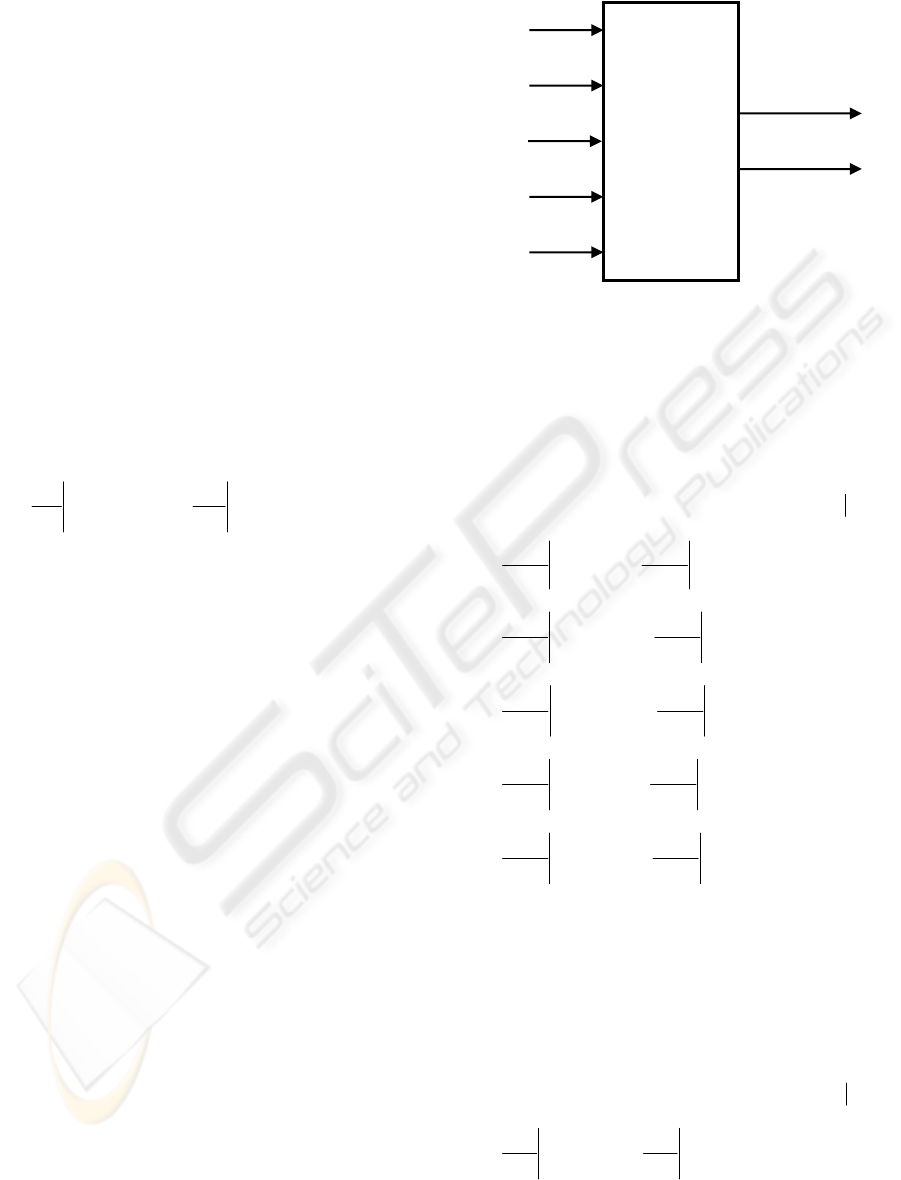
In Fig. 5 the resolver controllable model for a
standard manufacturer is shown, where the
considered variables account for:
U
0
= resolver input voltage;
F = input frequency;
n
st
= number of windings of the stator transformer;
n
rt
= number of windings of the rotor transformer;
n
ss
= number of windings of the stator sensor;
n
rs
= number of windings of the rotor sensor;
φ
st
= winding wire diameter of the stator transformer;
φ
rt
= winding wire diameter of the rotor transformer;
φ
ss
= winding wire diameter of the stator sensor;
φ
rs
= winding wire diameter of the rotor sensor;
U, F
n
st
, φ
st
U
cos
, U
sin
Resolver
Model
n
rt
, φ
rt
I
n
st
, φ
st
n
rt
, φ
rt
Figure 5: Resolver complete controllable Model
The differential model for the resolver output
voltage (U
cos
) that copies with the marginal changes
on the manufacturer controllable variables is:
(
)
=
rsssrtstrsssrtstcos
,,,,n,n,n,n F, U,U
φ
φ
φ
φ
(
)
+=
0
rs0ss0rt0st0rs0ss0rt0st000cos
,,,,n,n,n,n ,F,UU
φφφφ
() ()
+−
∂
∂
+−
∂
∂
+
0
0
cos
0
0
cos
FF
F
U
UU
U
U
() ()
+−
∂
∂
+−
∂
∂
+
rt0rt
0
rt
cos
st0st
0
st
cos
nn
n
U
nn
n
U
() ()
+−
∂
∂
+−
∂
∂
+
rs0rs
0
rs
cos
ss0ss
0
ss
cos
nn
n
U
nn
n
U
() ()
+−
∂
∂
+−
∂
∂
+
rt0rt
0
rt
cos
st0st
0
st
cos
UU
φφ
φ
φφ
φ
() ()
rs0rs
0
rs
cos
ss0ss
0
ss
cos
UU
φφ
φ
φφ
φ
−
∂
∂
+−
∂
∂
+
(9)
Using the same approach, the influences on the
input current (I) caused by small changes in the
controllable variables can be computed as:
(
)
=
rsssrtstrsssrtst
,,,,n,n,n,n F, U,I
φ
φ
φ
φ
(
)
+=
0
rs0ss0rt0st0rs0ss0rt0st000
,,,,n,n,n,n ,F ,UI
φφφφ
()()
+−
∂
∂
+−
∂
∂
+
rt0rt
0
rt
st0st
0
st
nn
n
I
nn
n
I
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
42

()()
+−
∂
∂
+−
∂
∂
+
0
0
0
0
FF
F
I
UU
U
I
()()
+−
∂
∂
+−
∂
∂
+
rs0rs
0
rs
ss0ss
0
ss
nn
n
I
nn
n
I
()()
+−
∂
∂
+−
∂
∂
+
rt0rt
0
rt
st0st
0
st
II
φφ
φ
φφ
φ
()()
rs0rs
0
rs
ss0ss
0
ss
II
φφ
φ
φφ
φ
−
∂
∂
+−
∂
∂
+
(10)
The several partial diferencial functions stated
on both models (eqs. 9 and 10) have been
experimentally evaluated, with a set of measuring
points, which were fitted by 2
nd
order polynomials.
This method proved to be very suitable for this
purpose (Cruz, 1997).
3 SIMULATION AND
EXPERIMENTAL RESULTS
3.1 Simulation Results
The nominal model shown in 2.2.1 was numerically
evaluated with the software Matlab (Mathworks) for
different resolver winding designs. All the winding
designs were configured for the Siemens 1-speed
resolver H2109 which has the following main
characteristics:
U = 5V;
Freq. = 4kHz
I
max
. = 50 mA
The parameters referred on the nominal model
(eqs. 6 and 7) were experimentally evaluated
following the methodology proposed by Figueiredo
(Figueiredo, 2004). Applying this methodology for
each one of the possible combinations of the 10
controllable variables, it resulted on 10 different sets
of parameters needed. These results account only for
a single change in each one of the 10 controllable
variables. Actually the experiments have been
repeated, at least, for 5 different values for each
variable, also it resulted finally on a total of 50 sets
of parameters evaluated.
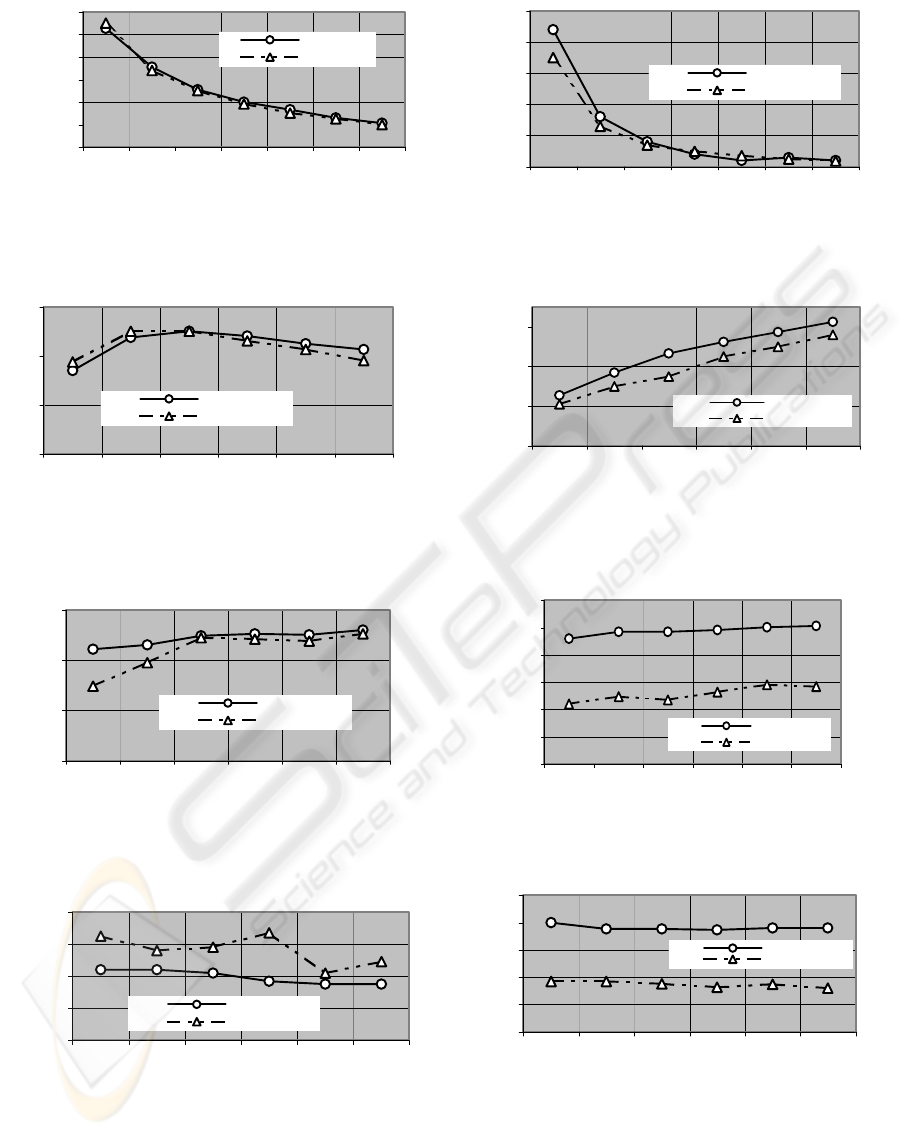
The simulated values for both customer main
specifications: U
cos
and I (according eqs. 6 and 7) are
shown in figs. 6 to 13.
These figures show the model ability to deliver
very good results when compared with the
experimental measurements for a broad
configuration of windings.
The results shown here were selected from a
huge quantity of computed data according to the
following main criterion: - selection from the 8
defined controllable variables (number of windings
and wire diameters) those that are, from
manufacturer side, easier to change, and that
produce effectiver results on the customer main
specifications (U
cos
and I).
Concerning the Output voltage (U
cos
) as it
depends on the rotor relative position to the stator,
the values shown, concern the zero electrical angle
where the stator and rotor are align at the null value.
This relative position rotor to stator is referred as
U
cos(0)
.
According the above criterion the following
studies are presented in the below figures:
U
cos(0)
(n
st
); U
cos(0)
(n
rt
); U
cos(0)
(φ
r
); U
cos(0)
(φ
s
); I
(0)
(n
st
);
I
(0)
(n
rt
); I
(0)
(φ
r
); I
(0)
(φ
s
).
3.2 Experimental Results
The experimental results have been taken from the
Siemens 1-speed Resolver H2109 which electrical
main specifications had already been shown in 3.1.
As it had been also related in 3.1, in order to
evaluate the model parameters, a huge amount of
measurements had been carried on.
The experimental results shown here correspond
to the simulated values shown in figs. 6 to 13. The
plotting of the experimental results side by side with
the simulated ones displays clearly the quality of the
model developed in this paper.
The knowledge of the experimental curves that
reflect the sensitivity of the resolver to each one of
the production controlable variables proved to be a
strong valuable tool to the manufacturer. Actually
this knowledge allows the manufacturer to react to
product deviations due to unknown changes in the
production processes.
The production variables, selected by the
manufacturer, to serve as the most suitable ones to
react quickly to undesirable changes in the assembly
processes have been already referred in 3.1. These
variables are: n
st
, n
rt
, φ
r
and φ
s
.
A PRO-ACTIVE RESOLVER MODEL TO COPE WITH PARAMETER VARIABILITY IN THE MANUFACTURING
CHAIN
43
0
1
2
3
4
5
6
50 100 150 200 250 300 350
N. of windings Transformer-Stator
Output Voltage (Ucos) [V]
experimental
simulation
Figure 6: Output VoltageU
cos(0)
) vs number of windings of
the stator transformer (n
st
)
0
1
2
3
100 200 300 400 500 600
N. of windings Transformer-Rotor
Output Voltage (Ucos) [V]
experimental
sim ulation
Figure 7: Output Voltage (U
cos(0)
) vs number of windings
of the rotor transformer (n
rt
)
1,5
2
2,5
3
0,06 0,08 0,10 0,12 0,14 0,16
Wire diameter Sensor-Rotor
Output Voltage (Ucos) [V]
experimental
sim ulation
Figure 8: Output Voltage (U
cos(0)
) vs winding wire
diameter of the rotor sensor (
φ
r
)
2,5
2,6
2,7
2,8
2,9
0,06 0,08 0,10 0,12 0,14 0,16
Wire diameter Sensor-Stator
Output Voltage (Ucos) [V]
experimental
sim ulation
Figure 9: Output Voltage (U
cos(0)
) vs winding wire
diameter of the stator sensor (
φ
s
)
0
50
100
150
200
250
50 100 150 200 250 300 350
N. of windings Transformer-Stator
Input Current (I) [mA]
experimental
sim ulation
Figure 10: Input Current (I
(0)
) vs number of windings of
the stator transformer (n
st
)
0
20
40
60
100 200 300 400 500 600
N. of windings Transformer-Rotor
Input Current (I) [mA]
experimental
simul ation
Figure 11: Input Current (I
(0)
) vs number of windings of
the rotor transformer (n
rt
)
20
25
30
35
40
45
50
0,06 0,08 0,10 0,12 0,14 0,16
Wire diameter Sensor-Rotor [mm]
Input Current (I) [mA]
experim ental
sim ulation
Figure 12: Input Current (I
(0)
) vs winding wire diameter of
the rotor sensor (
φ
rd
)
25
30
35
40
45
50
0,06 0,08 0,10 0,12 0,14 0,16
Wire diameter Sensor-Stator [mm]
Input Current (I) [mA]
experimental
sim ul a tion
Figure 13: Input Current (I
(0)
) vs winding wire diameter of
the stator sensor (
φ
s
)
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
44

4 CONCLUSIONS
From a practical point of view the results from this
research proved to be very valuable for the Siemens
resolver manufacturer. In fact the knowledge of the
experimental curves that reflect the sensitivity of the
resolver to each one of the production controllable
variables proved to be a strong valuable tool to the
manufacturer. Actually this knowledge allows the
manufacturer to react quickly to product deviations
due to unknown changes in the production
processes.
From a scientific point of view the accuracy of
the combined model strategy (nominal and
incremental models) delivers results with an average
error, in the worst case, of 22%.
This error is still substantial and it denotes that
there are some physical effects that should be better
accounted on the nominal model, specially when it
concerns the wire diameters. The incremental model
must remain as it was presented, as long as the
winding parameters remain the only controllable
variables for the resolver manufacturer.
ACKNOWLEDGMENTS
All the laboratorial work presented in this paper was
supported by means of manufacturing machinery,
test equipment and resolver products by Siemens SA
– plant Évora. This research was led according to an
existing cooperation program established between
University Evora and Siemens SA – plant Évora.
REFERENCES
Chang, Y. (2003). Buffered DDA command generation in
a CNC
. Control Engineering Practice 11 (2003) pp.
797-804
Cruz, A. (1997).
Modelling an analog rotation sensor. – in
portuguese version – P.G. Study. U. Evora, Phys. Dept
Figueiredo, J., Sá da Costa, J. (2004). Analog Rotation
Sensors: An Industrial Approach for Modeling and
Simulation
. Proc. Controlo 2004 - 6
th
Conf. on
Automatic Control, Faro
Golker, W., H. Tamm, S. Smith (1981).
Ein Messgetriebe
fuer den Airbus A310: Position Pick-off Unit
. Siemens
Components 19 (1981) Heft 4, pp. 125-128
Lin, T., Pan, Y., Hsieh, C. (2003).
Precision-Limit
positioning of direct drive systems with the existence
of friction
. Control Engineering Practice 11 (2003) pp.
133-244
Logé, H. (1992). Hohlwellendrehmelder: neue
Komponenten der Servotechnik
. Siemens Components
30 (1992) Heft 2, pp. 57-60
Ostolaza, J., Zubia, I., Tapia, G., Tapia, A., Sanz, M.
(2002).
An Alternative Approach for the control of
DC-DC Converters
. Proc. 10
th
IEEE Med. Conf. On
Control and Automation, 2002, IST, Lisboa.
A PRO-ACTIVE RESOLVER MODEL TO COPE WITH PARAMETER VARIABILITY IN THE MANUFACTURING
CHAIN
45
