
TOWARDS IMPROVING ROBOTIC SOFTWARE REUSABILITY
WITHOUT LOSING REAL-TIME CAPABILITIES
Frederic Pont and Roland Siegwart
Autonomous System Lab
Swiss Federal Institute of Technology Lausanne (EPFL)
1015 Lausanne, Switzerland
Keywords:
autonomous mobile robots, real-time systems, software reusability, Linux
Abstract:
We aim at improving sharability and reusability of software for autonomous mobile robots without sacrificing
real-time capabilities. As a first step towards this goal, we focus on real-time Linux and we introduce the
concept of a robotic hardware abstraction layer that provides for software reusability on different types of
hardware and in real-time or non real-time context. We also present a preliminary implementation using RTAI
Linux on the tour-guiding robot RoboX.
1 INTRODUCTION
As the complexity of autonomous mobile robots in-
creases, it becomes difficult for researchers with dif-
ferent backgrounds and motivations to master all in-
volved disciplines. The software running on com-
plex systems often glues together these different dis-
ciplines in order for autonomous robots to achieve
their complex missions.
In an effort to better organize the multiple pieces
of software on mobile robots, software architectures
have been studied for many years, from Brook’s Sub-
sumption (Brooks, 1986) to the three-layer architec-
tures (Gat, 1997).
During the last few years, the idea of leveraging
existing robotic software has emerged. The vision
of being able to reuse reference implementations and
to glue them with a new piece of code to obtain a
robot able to perform complex tasks is appealing. One
would also be able to compare its research against ref-
erence implementations of well-known methods.
Existing efforts focusing on better software
reusability include the PlayerStage project (Gerkey
et al., 2001) which proposes a hardware abstraction
useful for reusability, but lacks support for time-
constrained applications and GenoM (Fleury et al.,
1997), which provides tools to facilitate the definition
and integration of functional modules. The CLARAty
architecture (Volpe et al., 2001) also provides a frame-
work for reusable robotic components.
As we consider real-time capabilities a necessity
for autonomous systems, we propose to tackle the
reusability problem using a bottom-up approach. We
will study the constraints and limitations that have to
be defined for producing reusable software without
losing the option to use the software with real-time
constraints.
In this paper
1
, we introduce the concept of a real-
time capable robotic hardware abstraction layer. Such
a layer will provide for reusability of software access-
ing a robot sensors and actuators, both in real-time
and non real-time context. We propose to consider
Linux extended for hard real-time as the underlying
real-time operating system.
With this quest for reusable, sharable and portable
software, we hope to improve the general quality
of autonomous systems by making it easier for re-
searchers to share and reuse quality pieces of software
written by specialists.
The remainder of this paper is organized as follows.
In the next section we argue that Linux extended with
real-time capabilities is a candidate for being a refer-
ence real-time operating system for autonomous mo-
bile robots. In section 3 we present how the concept of
hardware abstraction layer can be used on top of real-
time Linux for providing improved software portabil-
ity and reusability, while preserving real-time capa-
bilities. In section 4, we briefly present our initial im-
plementation on the tour-guiding robot RoboX using
1
The work reported in this paper has been supported in
part by the IST Project RECSYS (IST-2001-32515).
291
Pont F. and Siegwart R. (2004).
TOWARDS IMPROVING ROBOTIC SOFTWARE REUSABILITY WITHOUT LOSING REAL-TIME CAPABILITIES.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 291-294
DOI: 10.5220/0001140102910294
Copyright
c
SciTePress

RTAI Linux. Finally, we present possible future re-
search orientations and some concluding remarks.
2 REAL-TIME LINUX
In the context of our quest for improved reusability of
robotic software, we evaluate key criterias for a real-
time operating system (RTOS) for autonomous mo-
bile robots, and we argue that Linux is an excellent
candidate.
Hard real-time capabilities are required to success-
fully complete autonomous missions. Key features
including precision and security depend on them.
The standard Linux kernel does not provide hard
real-time and was developed for maximal global
throughput. Two different approaches exist to im-
prove the standard Linux kernel response times
(Dankwardt, 2002a). The first approach consists in
improving the kernel preemptability to provide more
responsiveness to applications (Dankwardt, 2002b)
but does not provide hard real-time. The second ap-
proach is to insert a real-time micro kernel on top
of the hardware and to run the standard Linux ker-
nel as its lowest priority task that can be preempted at
any time to run real-time tasks. This solution pro-
vides hard real-time and has been adopted by the
main open-source real-time Linux projects, RTLinux
(Hilton and Yodaiken, 2001) and RTAI Linux (Man-
tegazza et al., 2000). We will refer to this sub-kernel
approach as real-time Linux.
Portability across different platforms is key. The
same RTOS shall be available for most of the robotic
platforms. If standard Linux is available for most
commonly used platforms, portability of real-time ex-
tensions is still work in progress but is available for
the main platforms like x86 and PowerPC.
Scalability from low-power or FPU-less CPUs to
more powerful systems is required. Linux can be
adapted to run on a wide range of systems. Linux’s
footprint is still relatively larger than specialized
RTOS like VxWorks, but can usually be made small
enough through careful configuration.
Reliability is very important for autonomous sys-
tems that will run for long periods of time without
human intervention. Linux has became famous over
the years for its reliability.
The above criterias can be considered as require-
ments that are all met by Linux with real-time exten-
sions. Other advantages of using real-time Linux are
worth mentioning, like cost, available software base
and desktop-target integration. Support is sometimes
seen as a weak point compared to commercial RTOS,
but the support provided by the open-source commu-
nity is usually excellent, even for mission critical de-
velopments (Norris, 2004).
In the next section, we present how we can take
advantage of real-time Linux features to define a real-
time capable robotic hardware abstraction layer that
provides for better robotic software reusability.
3 REUSABILITY WITH
REAL-TIME CAPABILITIES
One of the consequences of choosing real-time Linux
as our RTOS is that real-time capabilities are only ac-
cessible from kernel space unless RTAI LXRT (Man-
tegazza et al., 2000) is available.
As we aim for real-time capable reusability, each
reusable piece of code shall be written taking into ac-
count the usual limitations of kernel space develop-
ment (Rubini and Corbet, 2001), like the non avail-
ability of libraries like libc. Pieces of code using such
user space libraries can not be reused in real-time con-
text. A list of requirements the reusable code shall
comply with to ensure reusability in kernel space will
have to be defined.
As a first step towards improving robotic software
reusability without sacrificing real-time capabilities,
we will consider how reusable code can access func-
tionalities provided by the hardware it is running on,
through a concept of hardware abstraction to extend
reusability to different types of hardware. We will
study in further research how a reusable piece of code
can access functionalities provided by other reusable
pieces of code.
The usual approach for improving portability
across hardware platforms is to use a hardware ab-
straction layer (HAL). A HAL is a layer between the
physical hardware of a computer and the software that
runs on that computer. The function is to hide differ-
ences in hardware and therefore provide a consistent
platform to run applications on.
The exact definition of the types of hardware ab-
stracted by the HAL is out of the scope of this doc-
ument. At this point, let us assume that the HAL
abstracts sensors and actuators commonly used on
autonomous mobile robots, like motors, encoders,
bumpers or lasers.
Such an abstraction layer has already been defined
for mobile robots (Vaughan et al., 2003), but it is not
suitable for usage in kernel space, therefore limiting
its availability to non real-time applications. In this
document we introduce the concept of a HAL usable
both in real-time and non real-time context.
We propose to implement this HAL as a set of C
functions that can be access both from Linux user
space and from kernel space. This allows code that
uses this set of C function (HAL) to be reused in user
space when no real-time is required, and in kernel
space when real-time is necessary.
ICINCO 2004 - ROBOTICS AND AUTOMATION
292
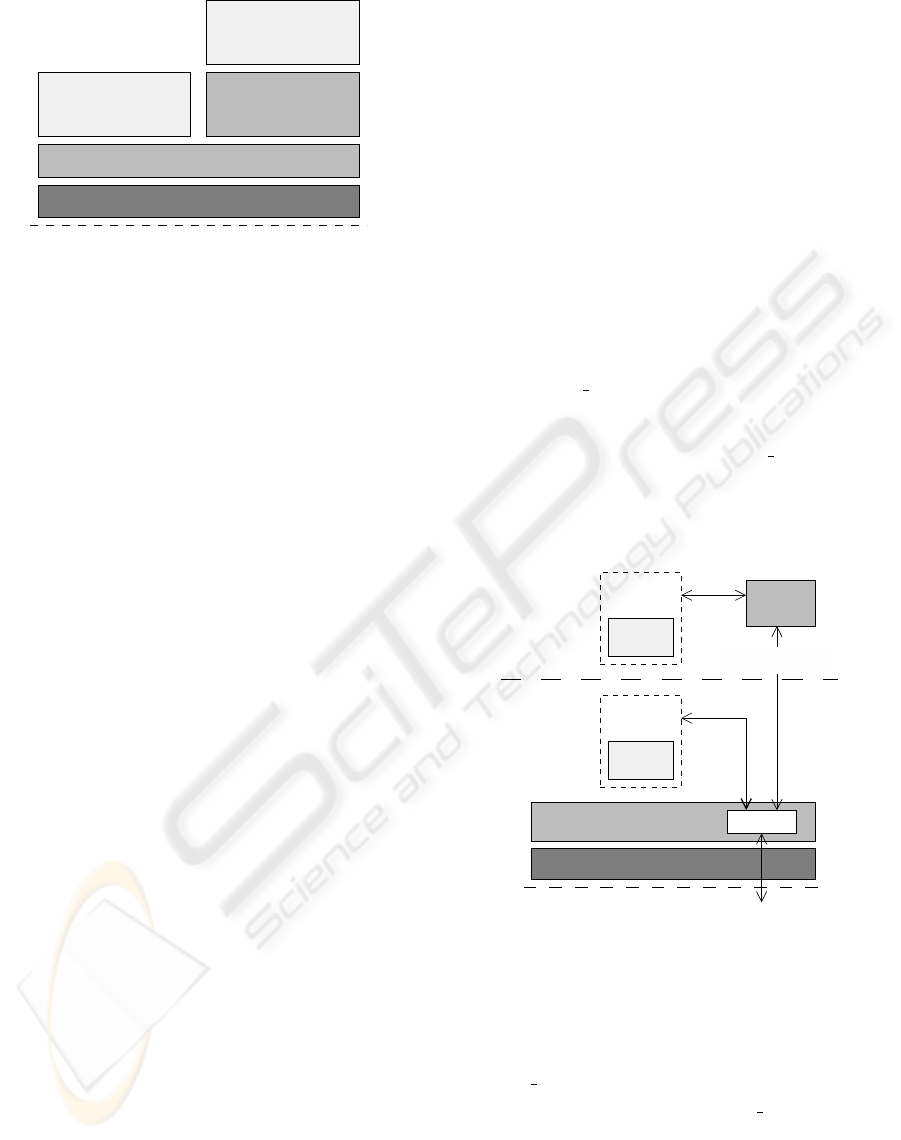
user Hardware
Abstraction Layer
(uHAL)
reusable software
in non real−time
context (user space)
reusable software
in real−time
context (kernel space)
kernel Hardware Abstraction Layer (kHAL)
device drivers
hardware
Figure 1: Reusable software with and without real-time
needs on top of a multi-level hardware abstraction layer
(HAL).
As illustrated on figure 1, we introduce a multi-
level HAL that provide hardware abstraction usable
in real-time context in kernel space, and in non real-
time context in user space.
In kernel space, we define the kernel hardware ab-
straction layer (kHAL) that will be implemented by
one or more kernel modules. The kHAL will provide
access to the hardware through device drivers. The
kHAL will be accessed directly by reusable code exe-
cuted in a real-time task, and will provide an interface
for communicating with user space.
In user space, we define the user hardware abstrac-
tion layer (uHAL) that we implement in the form of a
library that can be linked with a reusable piece of code
that needs access to HAL. The uHAL is responsible
for accessing the hardware through the kHAL.
In order to provide the exact same functions, uHAL
and kHAL share the same header file that describes
the available functions. This header file is to be in-
cluded by all reusable piece of code that want to ac-
cess hardware functions through HAL.
By providing the exact same functions (HAL) in
both user space and kernel space, we ensure that
reusable pieces of code developed for accessing hard-
ware through HAL can be executed both in non real-
time (user space) and real-time (kernel space).
The communication between uHAL (user space)
and kHAL (kernel space) can be done in different
ways. In our first implementation, we have chosen
to use the device file interface for transferring data
between the user space uHAL and the kernel space
kHAL.
Unix-like operating systems like Linux use the
same system calls to interact with regular files on disk
and to interact with I/O devices (Bovet and Cesati,
2003). For each type of abstracted hardware the HAL
provides an interface to, kHAL is responsible for cre-
ating a character device file (e.g. /dev/hal/encoders
for encoders). uHAL can then use the appropriate de-
vice file to perform the usual file operations (open(),
close(), read(), write()) to communicate with kHAL.
The file operations executed by uHAL on a device file
will be handled by the appropriate kHAL module. For
each type of abstracted hardware, the type of data to
be transferred between kHAL and uHAL has to be
defined.
Note that the communication mechanisms between
uHAL and kHAL can be improved without any con-
sequences on the reusable code relying on HAL.
As an example, let us consider a simple piece of
reusable code that reads the encoders of a mobile
robot to perform some computation (e.g. odometry).
If this piece of code uses HAL to read the encoders
values, it can be used in the context of two different
periodic tasks (real-time and non real-time), as illus-
trated on figure 2. Let us assume that the C func-
tion provided by HAL for reading encoders values is
called encoders
read().
If we reuse this piece of code within a task that
needs real-time capabilities, the task will be executed
in kernel space and the call to encoders
read() will be
served directly by kHAL. If this reusable code is used
in the context of a non real-time (user space) task, fig-
ure 2 illustrates how the encoders values are obtained
using the uHAL library:
library
uHAL
software
reusable
task
real−time
software
reusable
time task
non real−
user space
kernel space
/dev/hal/encoders
device drivers
hardware
kHAL modules encoders
Figure 2: Reusable software accessing encoders through
HAL executed in real-time and non real-time context.
1. the user-space application has been linked with the
uHAL library.
2. the application calls a function, say en-
coders
read(), provided by the uHAL library.
3. the implementation of the encoders read() function
in the uHAL library opens a device file specific to
the encoders (e.g. /dev/hal/encoders) to communi-
cate with kHAL.
4. kHAL reads the encoders values from its under-
lying hardware (through the appropriate device
driver) and sends the values back to uHAL.
TOWARDS IMPROVING ROBOTIC SOFTWARE REUSABILITY WITHOUT LOSING REAL-TIME CAPABILITIES
293

5. the user-space application obtains the encoders val-
ues.
This simple piece of reusable code can be executed
in different context without any change to the code.
4 IMPLEMENTATION
The platform selected for the first implementation of
the concepts presented above is the tour-guiding robot
RoboX (Siegwart et al., 2003).
RoboX includes a PowerPC 750 clocked at
400MHz that was used for safety-critical tasks like
navigation and obstacle avoidance, and a Pentium III
dedicated for interaction. As a first step, we have
replaced the current real-time operating system run-
ning on the PowerPC with RTAI Linux and developed
the necessary device drivers. Then, we have defined
and developed a HAL providing interfaces to the two
laser range sensors (SICK LMS-200), to the eight sur-
rounding bumpers, and to the two wheels motors and
encoders.
The first reusable piece of code that was developed
is a simplistic navigation algorithm that uses the in-
terfaces provided by HAL to the laser range sensors
and motors to move and avoid obstacles.
The reusable piece of code was successfully exe-
cuted in the context of a non real-time periodic task
in user space (using uHAL) and in the context of a
real-time periodic task in kernel space (using kHAL).
Note that the algorithm reused in this first imple-
mentation is not interesting by itself, but its reusabil-
ity in both real-time and non real-time context while
accessing RoboX hardware is a confirmation that
robotic software reusability with hardware abstraction
and real-time capabilities is possible.
5 CONCLUSION
In this paper, we have presented how a robotic hard-
ware abstraction layer (HAL) with real-time capa-
bilities can be defined on top of real-time Linux for
providing reusability of pieces of software accessing
robot sensors and actuators. We have also described
our preliminary implementation using RTAI Linux on
the tour-guiding robot RoboX.
Future challenges include the definition of the ab-
straction interfaces provided by HAL and the ex-
tension of the concept for communication between
reusable pieces of software. We will also investigate
further the impact of robot configuration on HAL, as
well as HAL integration into a higher level software
architecture.
We hope that the concepts we have proposed in
this paper will help robotic specialists focusing on
their specific fields of interest by providing means for
reusing existing quality software.
REFERENCES
Bovet, D. P. and Cesati, M. (2003). Understanding the
Linux Kernel, Second Edition. O’Reilly and Asso-
ciates, Inc.
Brooks, R. A. (1986). A robust layered control system for a
mobile robot. IEEE Journal of Robotics and Automa-
tion, 2(1):14– 23.
Dankwardt, K. (2002a). Real-time and Linux. Embedded
Linux Journal, 7:6–10.
Dankwardt, K. (2002b). Real-time and Linux, part 2: The
preemptible kernel. Embedded Linux Journal, 8:14–
17.
Fleury, S., Herrb, M., and Chatila, R. (1997). GenoM: a tool
for the specification and the implementation of oper-
ating modules in a distributed robot architecture. In
Proceedings of the International Conference on Intel-
ligent Robots and Systems, pages 842–848, Genoble,
France.
Gat, E. (1997). On three-layer architectures. Artificial In-
telligence and Mobile Robots. MIT/AAAI Press.
Gerkey, B., Vaughan, R., Sty, K., Howard, A., Sukhatme,
G., and Mataric, M. (2001). Most valuable player: A
robot device server for distributed control. In Pro-
ceedings of the International Conference on Intelli-
gent Robots and Systems, pages 1226–1231, Wailea,
Hawaii.
Hilton, E. F. and Yodaiken, V. (2001). Real-time applica-
tions with RTLinux. Embedded Linux Journal, 1:18–
20, 22–25.
Mantegazza, P., Dozio, E. L., and Papacharalambous, S.
(2000). RTAI: Real time application interface. Linux
Journal, 72.
Norris, J. S. (2004). Mission-critical development with
open source software: Lessons learned. IEEE Soft-
ware, 21:42–49.
Rubini, A. and Corbet, J. (2001). Linux Device Drivers:
Second Edition. O’Reilly and Associates, Inc.
Siegwart, R., Arras, K. O., Jensen, B., Philippsen, R., and
Tomatis, N. (2003). Design, implementation and ex-
ploitation of a new fully autonomous tour guide robot.
In Proceedings of the 1st International Workshop on
Advances in Service Robotics, Bardolino, Italy.
Vaughan, R. T., Gerkey, B. P., and Howard, A. (2003). On
device abstractions for portable, reusable robot code.
In Proceedings of the International Conference on In-
telligent Robots and Systems, pages 2121–2427, Las
Vegs, Nevada.
Volpe, R., Nesnas, I., Estlin, T., Mutz, D., Petras, R.,
and Das, H. (2001). The CLARAty architecture for
robotic autonomy. In IEEE Aerospace Conference
Proceedings, pages 121–132, Big Sky, Montana.
ICINCO 2004 - ROBOTICS AND AUTOMATION
294
