
MULTILEVEL DARWINIST BRAIN IN ROBOTS
Initial Implementation
Franciso Bellas
Grupo de Sistemas Autónomos, Universidade da Coruña, Mendizábal S/N, Ferrol, A Coruña
Richard J. Duro
Grupo de Sistemas Autónomos, Universidade da Coruña, Mendizábal S/N, Ferrol, A Coruña
Keywords: Cognitive Mechanism, Evolutionary Computation, Neural Networks
Abstract: In this paper we present a Cognitive Mechanism called MDB (Multilevel Darwinist Brain) based on Darwinist
theories and its initial application to autonomous learning by robotic systems. The mechanism has been designed
to permit an agent to adapt to its environment and motivations in an autonomous way. The general structure of the
MDB is particularized into a two level architecture: reasoning and interaction. This structure corresponds to a
generic cognitive model where world, internal and satisfaction models are used to select strategies that fulfil the
motivation of the agent. The main idea behind the proposal is that all of the components of the mechanism are
obtained and modified through interaction with the environment in real time by means of on line Darwinist
processes, allowing for a natural learning curve. The mechanism is able to provide solutions based on experience
or original solutions to new situations. The knowledge used by the agent is acquired automatically and not
imposed by the designer. Here we discuss the basic operation of the mechanism and demonstrate it through a real
example in which a hexapod robot is taught to walk efficiently and to reach an objective in its surroundings.
1 INTRODUCTION
From a practical point of view, a Cognitive Mechanism
permits an artificial agent to autonomously control its
actuators using the sensorial information it has in order
to achieve a given objective or complete a task. After
revisiting the different tendencies found in the literature
of the last twenty years, we have extracted four basic
features that different authors propose as necessary for a
viable complete cognitive mechanism:
• The use of explicit models of the environment and
of the agent itself in order to be able to carry out complex
tasks requiring reasoning (deliberative capabilities).
• The system should display reactive capabilities in
order to provide quick response in real problems.
• The minimization of the influence of the designer
using techniques that permit an automatic design process
(such as evolution).
• The system should be adaptive in order to apply
the Cognitive Mechanism in dynamic environments.
Traditional deliberative systems were usually based
on symbol manipulation (Newell and Simon, 1976), and
classified as Symbolic Artificial Intelligence. Some
examples of Cognitive Mechanisms using this approach
could be (Bratman, Israel and Pollack, 1988) and (Agre
and Chapman, 1987). There are several studies, for
example (Chapman, 1987), concluding that the
complexity of a symbol based system necessary to solve
a high level reasoning problem make this approach
practical only for domain limited tasks. Furthermore, in
classical deliberative systems the intervention of the
designer is crucial, and the resulting mechanisms present
a low level of adaptability.
Most reactive solutions have been mainly variations
of the general concepts proposed in the Subsumption
Architecture (Brooks, 1986) designed by Brooks, where
simple behavior modules compete for the control of the
agent. These systems are characterized by a quick
response in real tasks due to their simplicity, but they
present limitations when applied to high level reasoning
problems because of the lack of reflexive elements. In
addition, the participation the designer is high because
the simple modules must be designed “by hand”. As
relevant examples of these systems we could cite
(Kaelbling, 1987) and (Maes, 1991).
In order to make the design process easier and to
minimize the tweaking by the designer, some authors
have applied different techniques that permit obtaining
25
Bellas F. and Duro R. (2004).
MULTILEVEL DARWINIST BRAIN IN ROBOTS - Initial Implementation .
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 25-32
DOI: 10.5220/0001140700250032
Copyright
c
SciTePress
the cognitive architectures (or some parts of them)
automatically. For instance, evolutionary algorithms
have been applied in different systems providing
adequate solutions in an autonomous way (Floreano and
Mondada, 1996).
In addition to these four features (deliberative,
reactive, automatic design and adaptive) we impose as
the main requirement to the mechanism that the
acquisition of knowledge be automatic, this is, the
designers should not impose their knowledge on the
system. A Cognitive Mechanism, in our opinion, is a
framework that allows the system to acquire knowledge
from its environment and itself and provides a way of
using it in the generation of actions that lead the agent to
fulfil its motivations and not the knowledge itself
whether in the form of a function relating perceptions
and actions or any other format.
In the quest for a way to fulfil all the aforementioned
requirements, especially the last one, we have resorted to
bio-psychological theories within the field of cognitive
science that relate the brain and its operation through a
Darwinist process. These theories are:
• The Theory of Evolutionary Learning Circuits
(TELC) (Conrad, 1974, 1976).
• The Theory of Selective Stabilization of Synapses
(TSSS) (Changeux et al., 1973) (Changeux & Danchin,
1976).
• The Theory of Selective Stabilization of Pre-
Representations (TSSP) (Changeux et al., 1984).
• The Theory of Neuronal Group Selection (TNGS)
or “Neural Darwinism” (Edelman, 1987).
Each theory has its own features, which can be
studied in the references, but they all lead to the same
concept of cognitive structure based on the fact that the
brain adapts its neural connections in real time through
evolutionary or selectionist processes. This idea of
Darwinism in the acquisition of knowledge is the basis
for the development of the practical Cognitive
Mechanism we propose here. In the following sections
we will explain how this idea can be implemented in a
working structure starting from the formal definition of a
cognitive model and how it leads to the successful
interaction of real robotic agents with their world during
their lifetime
2 COGNITIVE MODEL
One classical way of formalizing the operation of a
general cognitive model from a utilitarian point of view
starts from the premise that to carry out any task, a
motivation (defined as the need or desire that makes an
agent act) must exist that guides the behaviour as a
function of its degree of satisfaction. The tools the agent
can use to modify the level of satisfaction of its
motivation are perceptions through sensors and actions
through actuators, thus we consider that the external
perception e(t) of an agent is made up of the sensorial
information it is capable of acquiring through its sensors
from the environment in which it operates. The external
perception depends on the last action performed by the
agent A(t) and on the sensorial perception it had of the
external world in the previous time instant e(t-1) through
a function W corresponding to the environment or to a
mathematical model of it:
e(t) = W [e(t-1), A(t)]
The internal perception i(t) of an agent is made up of
the sensorial information provided by its internal sensors
(for example, a hunger sensor). The internal perception
can be written in terms of the last action performed by
the agent A(t) and on the sensorial perception it had from
the internal sensors in the previous time instant i(t-1)
through a function I corresponding to the internal
environment itself or to a mathematical model of it:
i(t) = I [i(t-1), A(t)]
We define the global perception G(t) of the agent as a
function that is made up of the external perception e(t)
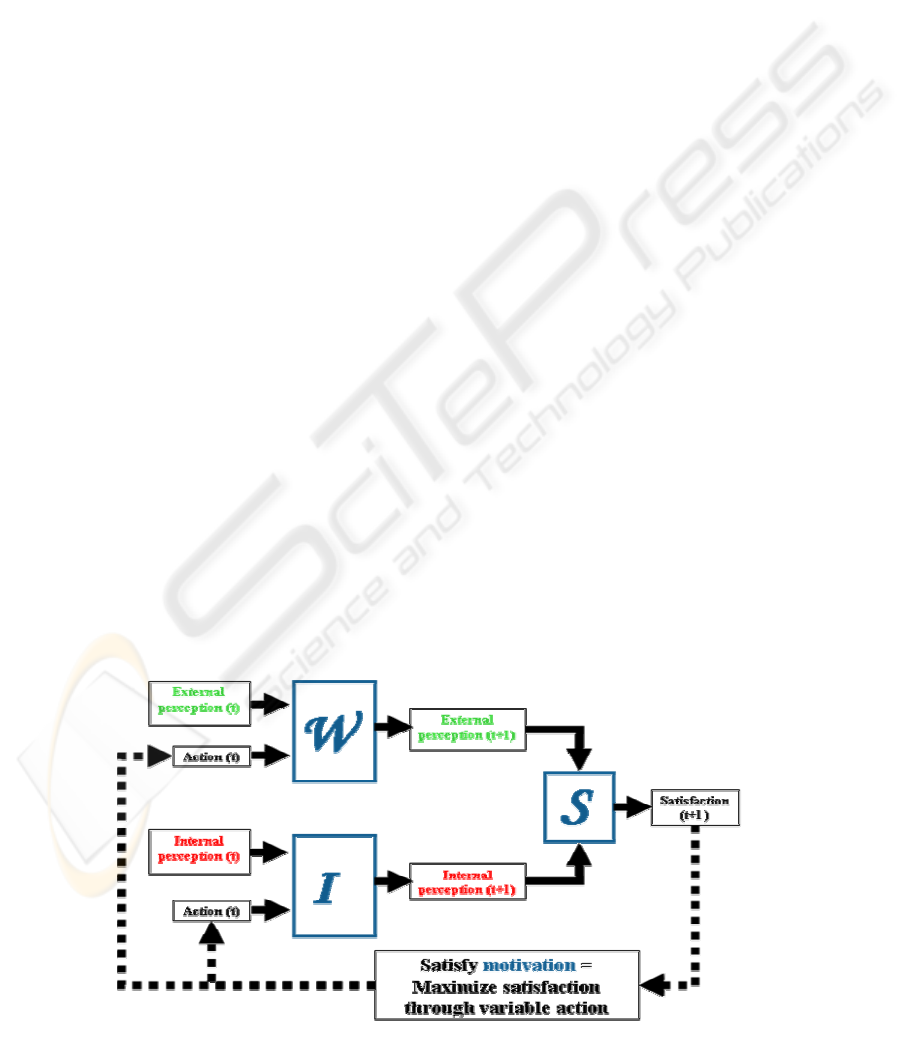
Figure 1: Functional diagram representing a general cognitive model
ICINCO 2004 - ROBOTICS AND AUTOMATION
26
and the internal perception i(t).
The satisfaction s(t) represents the degree of
fulfilment of the motivation and depends on the global
perception through a function S. Thus, generalizing:
s(t) = S [G(t)] = S [e(t), i(t)]=
= S [W [e(t-1), A(t)], I [i(t-1), A(t)]]
The Cognitive Mechanism must lead to the
satisfaction of the motivation, which, without any loss of
generality, may be expressed as the maximization of the
satisfaction. Thus:
max{s(t}) =
max {S [W [e(t-1), A(t)], I [i(t-1), A(t)]]}
To resolve this maximization problem, the only
parameter the agent can modify is the action it performs,
as the external and internal perceptions cannot be
manipulated (unless we change the environment or the
agent in order to facilitate the behaviour which is a topic
that is beyond the scope of this paper). That is, the
cognitive mechanism must explore the possible action
space in order to maximize the resulting satisfaction.
In a Cognitive Mechanism, the exploration of
actions must be carried out internally so W, I and S are
mathematical functions that must be somehow obtained.
These functions correspond to what are traditionally
called:
• World model (W): function that relates the external
perception before and after applying an action.
• Internal model (I): function that relates the internal
perception before and after applying an action.
• Satisfaction model (S): function that provides de
predicted satisfaction from the predicted external and
internal perceptions provided by the world and internal
models.
In Figure 1 we display a functional diagram
representing the cognitive model, and we can see that
there are two processes that must take place in a real non
preconditioned operating mechanism: models W, I and S
must be obtained as the agent interacts with the world,
and for every interaction of the world, the best possible
action must be selected through some sort of
optimization using the models available at that time.
When trying to implement this cognitive model
computationally, in addition to these basic elements
(perceptions, actions, motivations and models) we need
to include a new one: the action-perception pair. It is just
a collection of values from the interaction with the
environment after applying an action, that is, data from
the real world, and could be represented as follows:
As we can see, an action-perception pair is made up
of the sensorial data and the satisfaction related to the
application of an action and it is used as a pattern to
obtain the models in real time.
3 CONSTRUCTING THE MDB
As we have mentioned in the previous section, the
actions that must be applied in the environment are
selected internally by the agent and the internal operation
is made up of three main elements: a memory that stores
the action-perception pairs, a stage to improve the
models according to the real information available and
finally a stage to select the action to be applied.
Using this scheme we have constructed a new
Cognitive Mechanism called MDB (Multilevel
Darwinist Brain). The main difference of the MDB with
respect to other model based cognitive mechanisms is
the way the models are obtained and the actions planned
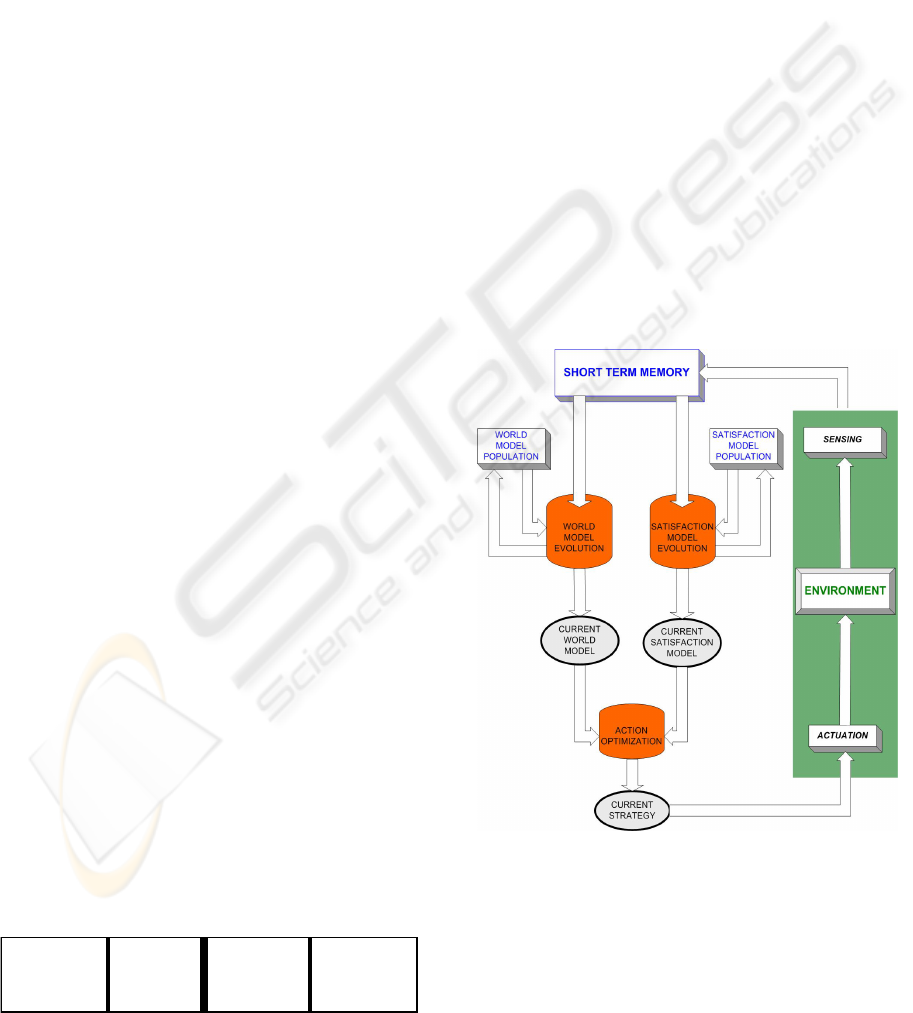
from them. Its functional structure is shown in Figure 2.
The final objective of the mechanism is to provide the
action the agent must apply in the environment to fulfil
its motivation. The main operation can be summarized
by considering that the selected action (represented by
the Current strategy block) is applied to the Environment
through the actuators (Actuation block) obtaining new
Sensing values. These acting and sensing values provide
a new action-perception pair that is stored in the Action-
Perception Memory. Then, the Model Search/evolution
Sensorial
Data
(t)
Action
Applied
(t)
Sensorial
Data
(t+1)
Satisfaction
(t+1)
Figure 2: Block diagram of the MDB including
evolutionary learning elements.
MULTILEVEL DARWINIST BRAIN IN ROBOTS - Initial Implementation
27

processes start (for world, internal and satisfaction
models) trying to find functions that generalize the real
samples (action-perception pairs) stored in the Action-
Perception Pair Memory. The best models in a given
instant of time are taken as Current World Model and
Current Satisfaction Model and are used in the process of
Optimizing the Action. After this process finishes, the
best action obtained is applied again to the Environment
through the actuators obtaining new Sensing values.
These five steps constitute the basic operation cycle
of the MDB, and we will call it an iteration of the
mechanism. As more iterations take place, the MDB
acquires more information from the real environment
(new action-perception pairs) so the models obtained
become more accurate and, consequently, the action
chosen using these models is more appropriate.
There are two main processes that must be solved in
MDB: the search for the best world and satisfaction
models predicting the contents of the action-perception
pair memory and the optimization of the action trying to
maximize the satisfaction using the previously obtained
models. In the way these processes are carried out lies
the main difference of the MDB with respect to other
cognitive mechanisms.
3.1 On line creation of Models
In this context, a model is just a non linear function
defined in an n-dimensional space that approximates and
tries to predict real characteristics. Taking this into
account, possible mathematical representations for the
models are polynomial functions, simple rules, fuzzy
logic rules, neural networks, etc. Whatever the
representation, techniques for obtaining these functions
must be found considering that we have samples (action-
perception pairs) of the function to model, these samples
are known in real time and we want to obtain the most
general model possible, not a model for a given set of
samples present in a particular instant.
Taking these three points into account, the model
search process in the MDB is not an optimization
process but a learning process. As commented in (Yao,
96), learning is different from optimization because we
seek the best generalization, which is different from
minimizing an error function. Consequently, the search
techniques must allow for gradual application as the
information is known progressively and in real time. In
addition, they must support a learning process through
input/output pairs (action/consequence samples) using an
error function.
To satisfy these requirements we have selected
Artificial Neural Networks as the mathematical
representation for the models and Evolutionary
Algorithms as the most appropriate search technique.
This combination presents all the required features for
the automatic acquisition of knowledge (the models)
based on the Darwinist theories.
After applying an action in the environment and
obtaining new sensing values, the search for the models
are now evolutionary processes, one for the world
models and another for the satisfaction models. The use
of evolutionary techniques permits a gradual learning
process by controlling the number of generations of
evolution for a given content of the action-perception
pair memory. This way, if evolutions last just for a few
generations (usually from 2 to 4) per iteration, we are
achieving a gradual learning of all the individuals. In
order to obtain a general model, the populations of the
evolutionary algorithms are maintained between
iterations (new entries in the action-perception memory)
of the MDB. Furthermore, the evolutionary algorithms
permit a learning process through input/output pairs
using as fitness function an error function between the
predicted values provided by the models and the
expected values for each action-perception pair.
Strongly related to this process is the management of
the action-perception pair memory, because the quality
of the learning process depends on the data stored in this
memory and the way it changes. The data that must be
managed (samples of the real world) and stored in this
memory is acquired in real time as the system interacts
with the environment. From this point forward, this
memory will be called Short Term Memory (STM). It is
not practical or even useful, if we want an adaptive
system, to store in the STM all the samples acquired in
agent’s lifetime. We need to develop a replacement
strategy for this memory that permits storing the most
relevant samples for the best possible modelling.
3.2 Managing the STM
The replacement process in the Short Term Memory
depends on the way we compare the elements stored, in
this case, samples of a function. Whenever we have a
new sample we must decide if it is stored replacing one
that was previously stored in the STM. To compare
samples we must label them taking into account that we
hope to store the most relevant information to model. We
have designed a replacement strategy that labels the
samples using four basic features:
1. The point in time a sample is stored (T): this
parameter favours the elimination of the oldest samples,
maximizing the learning of the most current information
acquired.
2. The distance between samples (D): measured as
the Euclidean distance between the action-perception
pair vectors, this parameter favours the storage of
samples from all over the feature space in order to
achieve a general modelling. A min-max strategy is
used, this is, each sample is assigned a label D
corresponding to the minimum of the distances (d
i
) to the
ICINCO 2004 - ROBOTICS AND AUTOMATION
28

remaining samples. The samples that maximize the D for
the STM are stored.
3. The complexity of a sample to be learned (C): this
parameter favours the storage of the hardest samples to
be learned. To calculate it, we use the error provided by
the current model (m) when predicting a sample j (X
1
,…, X
n
, Y
1
,…,Y
k
), that corresponds to a previously
stored model with n inputs and k outputs.
4. The relevance of a sample (R): this parameter
favours the storage of the most particular and relevant
samples, those that escape from generality, that is, those
that, even though they may be learnt by the models very
well, initially presented large errors. It is a fundamental
term when working with real environments where
functions are not smooth. To calculate it, we use the
error provided by the current model when predicting a
new sample n (X
1
,…, X
n
, Y
1,
…,Y
k
). Consequently, it is
an initial error value and it doesn’t change while the
sample is in the STM:
Thus, each sample is stored in the STM has a label
(L) that is calculated every iteration as a linear
combination of these four basic terms:
where the constants K
i
control the relevance of each
term. This way, the main feature of the replacement
strategy presented is its dynamism and depending on the
value of the constants K
i
we can generate different
storage policies. For example, if we prefer to store the
newest samples without generalization considerations,
we can use K
t
= 1 and K
d
= K
c
= K
r
= 0 which is a FIFO
replacement strategy. This modification of the
parameters can be carried out automatically by the MDB
as a function of perception or strategy.
3.3 Action Search
An action is a command to the actuators of the agent and
its representation depends on the particular agent. The
search for the best action in the MDB is not a learning
process because we are looking for the best possible
action for a given set of conditions. That is, we must
obtain the action whose predicted consequences given by
the world and internal models result in the best predicted
satisfaction. Consequently, for the actions, we must solve
a simple optimization problem in which any
optimization technique is valid. In our case, and for
homogeneity, we have used evolution.
It is important to note that the MDB always has
current world, internal and satisfaction models and a
current strategy available for the agent to make use of.
This implies that in its interaction with the world it does
not require waiting for the mechanism in order to act.
This provides the capability of real time interaction.
Obviously, the quality of these models and actions will
depend on how many action perception pairs the agent
has gone through in its life and how much “thinking”
time it has had to transform these data into information
in the form of useful models.
We have not imposed any restriction on the type of
evolutionary technique that can be applied: genetic
algorithms, evolution strategies, genetic programming or
macroevolutionary algorithms are suitable for the
process of learning the models.
In the next section, we present two simple
application examples to show the basic operation of the
MDB and its capabilities for the automatic acquisition of
knowledge that permits an agent to learn autonomously
from its interaction with the environment. To do this, we
have applied the MDB in a real hexapod robot trying to
perform a simple task.
4 MDB IN A REAL ROBOT
The left image of Figure 3 displays the Hermes II
hexapod robot used in this example. It is a robust robot
provided with six legs with two degrees of freedom and
six infrared sensors, each one placed on the top of each
leg, two whiskers, inclinometers and six force sensors.
The MDB mechanism was applied to a simulated model
(right image in Figure 3) of the Hermes II robot created
using the DADS 3-D mechanical simulator and then
transferred to the real robot
4.1 Learning to walk
In the first part of the example, we want the Hermes II
robot to learn to walk. We can describe the motion of
each leg through 3 parameters (for the swing and lift
motion): the initial phase, which establishes the starting
point of the leg motion, the frequency, which increases
or decreases the speed of the movement and the sweep
amplitude. In this case, all of the parameters are fixed
except the initial phase of the swing motion for each leg.
The different combinations of phases lead to different
gaits, some useful, some useless and some even
completely impractical. We want the mechanism to
RKCKDKTK=L
rcdt
⋅+⋅
+
⋅+⋅
Figure 3: The left image shows the Hermes II
robot and the right one shows the model used in
simulation.
MULTILEVEL DARWINIST BRAIN IN ROBOTS - Initial Implementation
29
allow the robot to develop an efficient gait so that it can
fulfil its motivations.
The robot starts from point (0,0) in each iteration and
an object (a block) is placed one meter away from it. The
mechanism selects the gait that must be applied and the
robot uses it during a fixed time (13 seconds in
simulation, 24 seconds in the real robot). Through its
infrared sensors using a time integration virtual sensor
presented in (Bellas et al., 2000), the robot always has an
indication (in general noisy) of the distance to the block.
These values are used as the input sensed values to the
world model.
The motivation of this behaviour for the agent is to
maximize the detection in the two front infrared sensors
(which corresponds to a minimization of the distance)
because we want it to reach the block frontally and using
a stable gait.
This way, we have a world model with 7 inputs, the
distance to the block provided by the virtual sensor and
the 6 input phases applied to the legs. The output from
the world model is the predicted distance to the block.
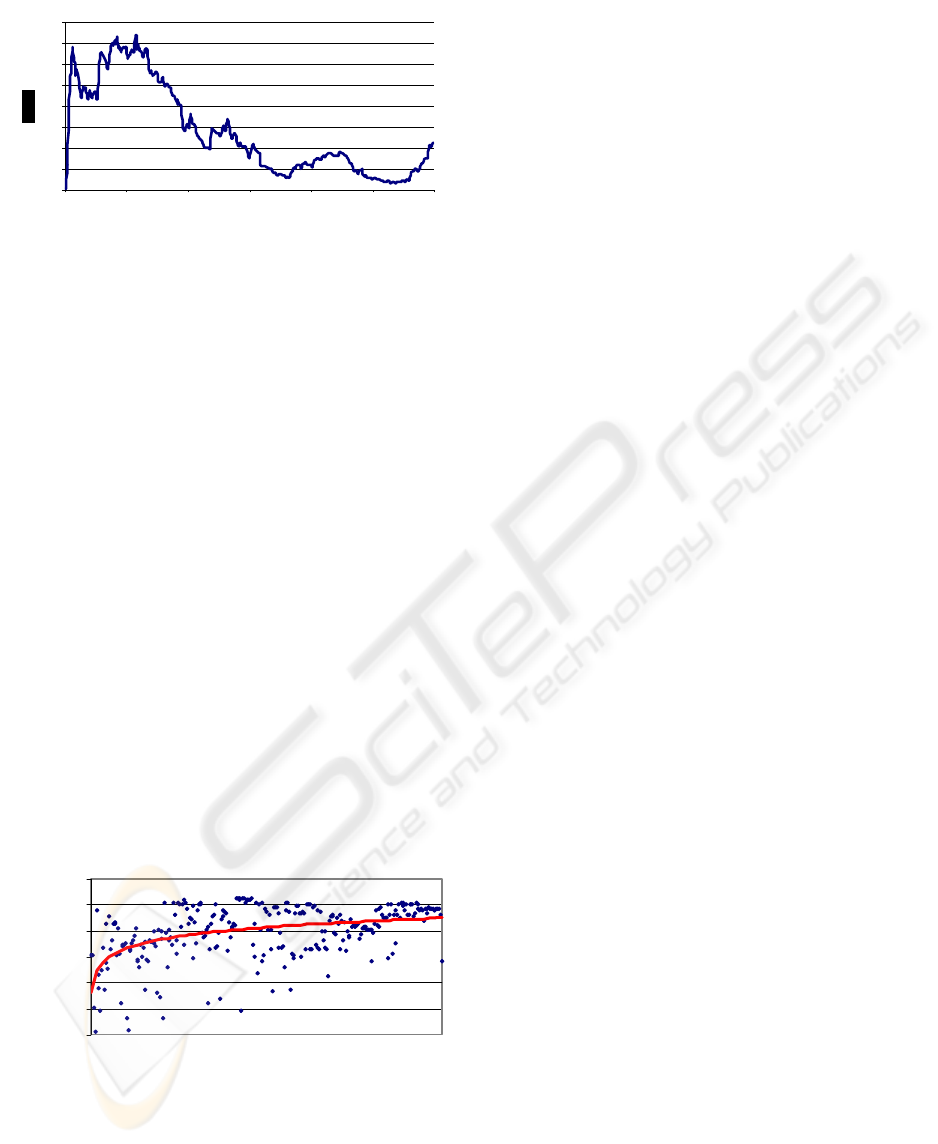
We have implemented the world models using
artificial neural networks (multilayer perceptrons). The
networks consisted of two 4 neuron hidden layers. In
Figure 4 we show the evolution of the mean squared
error between the distance predicted by the world model
and the real one. As we can see, the error becomes very
small about iteration 180 but it oscillates. This is because
a world model that is evolved for a given set of contents
in the short-term memory, could be less adequate for
another set. In this example, the short-term memory
contains 40 action-perception pairs and it works as a
FIFO memory, so the replacement strategy is purely
temporal in this first case.
For the evolution of the world models we have used
a simple genetic algorithm with 700 individuals, 57
genes (corresponding to the weights and bias of the 7-4-
4-1 neural network), 60% crossover and 2% mutation.
The satisfaction is directly the predicted distance to the
block. Thus the Hermes robot must select a gait in order
to minimize this distance. In this example, we will not
use an explicit satisfaction model.
For the optimization of the actions, we have also
used a genetic algorithm with 120 individuals, 6 genes
(direct encoding of the input phases), 60% crossover and
6% mutation.
In order to test how good a gait is, we define the
efficiency of a gait as the normalized distance in the
direction of the objective covered by the robot in a fixed
simulation time, weighted by the distance that its
trajectory is separated from a straight line. That is, we
consider that a gait is better if the robot goes straight to
the block without any lateral deviation. We must point
out that this measure is never used in the cognitive
mechanism; it is just a way of presenting results in
papers.
In Figure 5 we display the behavior of this efficiency
throughout the robot’s life. It can be observed that the
curve tends to 1 as expected. Initially, the gaits are poor
and the robot moves in irregular trajectories. This is
reflected in the efficiency graph by the large variations in
the efficiency from one instant to the next. Sometimes,
by chance it reaches the block, others it ends up very far
away from it. Note that whatever the result of the action,
it does produce a real action perception pair, which is
useful data in order to improve the models. As the
interaction progresses, the robot learns to reach the block
without any deviation in a consistent manner, and the
efficiency tends to one.
In the three graphs of Figure 6, we represent the
temporal occurrence of the end of the swing motion for
each leg. The top graph corresponds to iteration 6 and we
can see that the swings are completely out of phase. The
resulting gait is not appropriate for walking in a straight
line and the robot turns, leading to a low efficiency
value. The middle graph corresponds to iteration 87
where the resulting gait is more efficient than before
according to the level of error for that iteration (see
Figure 4). Finally, the bottom figure shows the
combination of phases corresponding to iteration 300. As
0
0,2
0,4
0,6
0,8
1
1, 2
1, 4
1, 6
0 50 100 150 200 250 300
It eration
Figure 4: Evolution of the mean squared error between
the output of the world model (distance to the object) and
the real distance.
-0,6
-0,3
0,0
0,3
0,6
0,9
1,2
1 41 81 121 161 201 241
Iteration
Efficiency
Figure 5: Efficiency of the gaits applied by the robot. As
time progresses it tends to one, this is, the robot moves
straight to the block without any lateral deviation.
ICINCO 2004 - ROBOTICS AND AUTOMATION
30
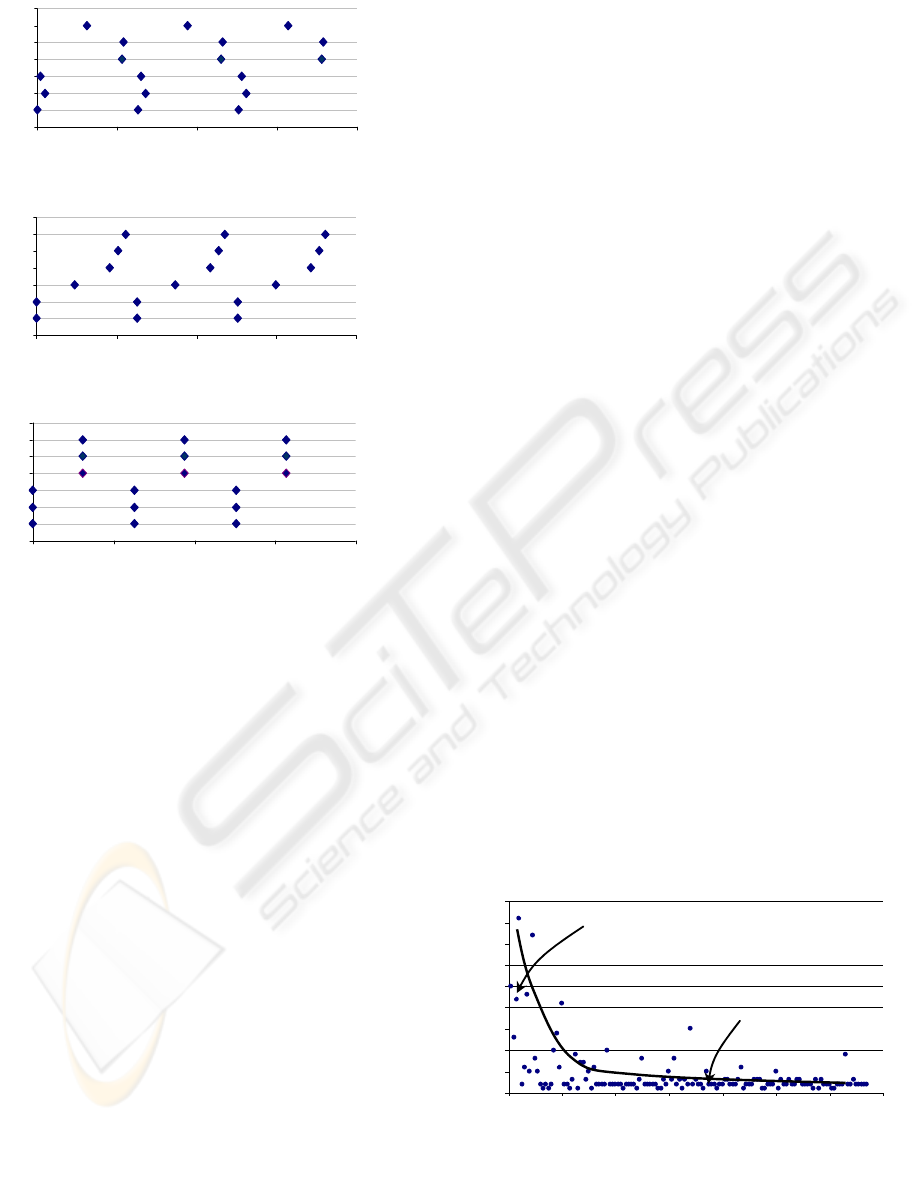
we can see, the initial phases are equal in groups of three
and the resulting gait is quite good. In fact, this
combination of phases leads to a very common and
efficient gait called tripod gait, where three legs move in
phase and the other three legs in counter-phase resulting
in a very fast and stable straight line motion.
We must point out that this gait was developed by
the robot itself, we just built the world for the robot to
learn and provided a motivation to reach an objective as
efficiently as possible.
4.2 Learning to turn
At this point, the Hermes II robot has learnt to walk, and
now we want it to learn to turn using the combination of
initial phases obtained (tripod gait). The main objective
of this second part of the example is to use an explicit
satisfaction model.
We place an object (a block) in a semicircunference
in front of the robot at a random distance between 50 and
100 cm, and the mechanism must select the best
combination of amplitudes in the swing motion in order
to reach it. The rest of the parameters in the gait are
fixed. If the robot reaches the block (distance of less than
20 cm) or if it loses it (distance larger than 100 cm) we
move it to a new position in the semicircunference. This
way, we develop a teaching method as we would do
with children: we present an objective and we reward the
good actions.
The world model has three inputs, the distance and
angle of the robot with respect to the block (provided by
the virtual sensor applied before) and the amplitude of
turn. The outputs are the predicted distance and angle.
These two magnitudes are the inputs to the satisfaction
model, which has just one output, the predicted
satisfaction. The motivation of the behavior is again the
maximization of the infrared sensing in the two front
sensors. Consequently, the robot must reach the block
(minimizing distance) with low deviation (minimizing
angle).
The models are represented by multilayer
perceptrons with two 4 neuron hidden layers for the
world models and two 3 neuron hidden layers for the
satisfaction models. The population in the genetic
algorithms was 600 individuals for the world models and
300 for the satisfaction models. In Figure 7 we have
represented the number of iterations between two
consecutive captures of the object. We can see clearly
how in the first stages of the behavior, there exists a big
delay from one capture to the next because the models
are poor and, as a consequence, the selected actions are
not successful. But the tendency changes about iteration
200 and the number of iterations between two
consecutive captures decreases to one.
In the top image of Figure 8 we display the path
followed by the real robot with the strategies applied in
iterations 53, 54, 55 and 56. As indicated in Figure 7,
these iterations correspond to the first stages of the
mechanism where the number of iterations required to
reach the object is large. In fact, the block remains in the
same position during the application of these four
strategies and the robot never turns towards it.
In the bottom image of Figure 8 we display the path
followed in iterations 421, 422, 423, 424. The robot
reaches the block in iterations 422, 423 and 424 and we
move it. The strategies are now very successful.
0
5
10
15
20
25
30
35
40
45
0 20 40 60 80 100 120 140
Capture
Iterations between captures
Iteration 60
Iterations 422, 423,
Figure 7: Iterations between two consecutive captures of
the object.
Figure 6: End of the swing motion for each leg in time.
Iteration 87
Iteration 300
0 5 10 15 20
Time (s)
Maximum am plitude
Front Left
Cente
r
Right
Rea
r
Left
Front Right
Cente
r
Left
Rear Right
Iteration 6
0 5 10 15 20
Time (s)
Maxim um amplitude
Front Left
Cente
r
Right
Rea
r
Left
Front Right
Cente
r
Left
Rear Right
0 5 10 15 20
Time (s)
Maxim um amplitude
Front Left
Cente
r
Right
Rea
r
Left
Front Right
Cente
r
Left
Rear Right
MULTILEVEL DARWINIST BRAIN IN ROBOTS - Initial Implementation
31

5 CONCLUSIONS
We have presented a Cognitive Mechanism for robots
(the Multilevel Darwinist Brain) that applies Darwinist
concepts like evolutionary learning to the autonomous
acquisition of knowledge by agents.
A classical utilitarian cognitive model including
motivations to guide the behaviors is particularized to
this Darwinist approach. There are evolutionary
optimization processes that must be continuously solved
in the MDB to internally decide the appropriate actions
and evolutionary search processes to obtain the models
where the actions are tested, following a deliberative
approach.
The mechanism was tested using a hexapod robot
which was trying to learn to walk and to reach an
objective. The results obtained are very promising, as the
robot was able to autonomously generate a tripod gait
and modulate the amplitudes of the legs in order to turn
to reach an objective through continuous interaction with
the environment using its own sensors and a very simple
motivation. This is very important because the
mechanism permits the robot to find the best solution
according to the limitations of its environment and its
sensorial and actuation apparatus allowing it to adapt and
survive in this particular world. One of the main features
of this type of mechanisms is that if the world changes,
the robot will adapt smoothly.
ACKNOWLEDGEMENTS
This work was partially funded by the Xunta de Galicia
(proyect PGIDIT02PXIB10501PR), the MCYT of Spain
(proyect VEM2003-20088-C04-01), and NATO
(PST.CLG.978744).
REFERENCES
Agre, P. E., Chapman, D. 1987. Pengi: An implementation of a
theory of activity. American Association for Artificial
Intelligence. pp 268-272
Bellas F., Becerra J.A., Santos J. and Duro R.J., 2000. Applying
Synaptic Delays for Virtual Sensing and Actuation in
Mobile Robots. Proc IJCNN 2000. pp 6144-6153
Beer R., Quinn R., Chiel H., Ritzmann R. 1997. Biologically
Inspired Approaches to Robotics. Communications of the
ACM, V.40 N. 3, pp 30-38
Bratman, M., Israel, D., Pollack, M., 1988. Plans and Resource-
bounded Practical Reasoning. Computational Intelligence,
4. pp 349-355.
Brooks, R., 1986. A Robust Layered Control System for a
Mobile Robot. IEEE J. Robotics and Automation RA-2 (1).
pp 14-23
Changeux, J., Courrege, P., Danchin, A., 1973. A Theory of the
Epigenesis of Neural Networks by Selective Stabilization
of Synapses, Proc.Nat. Acad. Sci. USA 70, pp 2974-2978
Changeux, J., Danchin, A., 1976. Selective Stabilization of
Developing Synapsis as a Mechanism for the Specification
of Neural Networks. Nature 264. pp 705-712.
Changeux, J., Heidmann, T., Patte, P., 1984 Learning by
Selection. Springer-Verlag
Chapman, D., 1987. Planning for conjunctive goals, Artificial
Intelligence, 32, pp 333-378
Conrad, M, 1974. Evolutionary Learning Circuits. Theor. Biol.
46, pp 167-188
Conrad, M., 1976. Complementary Molecular Models of
Learning and Memory. BioSystems 8, pp 119-138
Edelman, G., 1987. Neural Darwinism. The Theory of
Neuronal Group Selection. Basic Books
Floreano, D., Mondada, F., 1996. Evolution of Homing
Navigation in a Real Mobile Robot. IEEE Trans. on Sys.
Man and Cybernetics Part B, 26(3), pp 396-407.
Kaelbling L., 1986. An Architecture for Intelligent Reactive
Systems. Reasoning about Actions and Plans. Proceedings
for the 1986 Workshop. pp 395-410
Maes, P., 1991. The Agent Network Architecture (ANA)"
SIGART Bulletin, 2(4), pp 115-120.
Yao, X., Liu, Y., Darwen, P., 1996. How to make best use of
evolutionary learning. Complex Systems: From Local
Interactions to Global Phenomena, pp 229-242.
Figure 8: The top image shows the path followed by
the Hermes II robot in the first iterations. The bottom
image shows the path when the behavior is successful.
Iteration 53
Iteration 54
Iteration 55
Iteration 56
Iteration 421
Iteration 422
Iteration 423
Iteration 424
ICINCO 2004 - ROBOTICS AND AUTOMATION
32
