
FIPA-OS AGENTS APPLIED TO PROCESS SCHEDULING IN
REAL TIME MONITORING
Angel Gómez, Diego Cantorna, Carlos Dafonte, Bernardino Arcay
Dept. of Information and Communications Technologies, University of A Coruña, Faculty of Informatics, A Coruña, Spain
Keywords: Intelligent agents, Telemedicine, Control systems, Hospital information systems
Abstract: This work presents a mechanism for the management of network tasks, based on the tech
nology of
Intelligent Agents applied to a project of Telemedicine in Intensive Care Units (ICUs).The telemedicine
system provides the real time acquisition and analysis of physiological data of patients, the graphical
visualisation of these data and their transmission to a central system charged with the collection and control
of all the information concerning the patient, including knowledge based systems for medical reasoning.
The system tasks are managed through the use of intelligent agents, implemented according to the FIPA
standard. Each of the agents disposes of a knowledge-based system for its decision-making.
1 INTRODUCTION
The supervision of Intensive Care patients requires a
complex real-time monitoring of their clinical
evolution. In recent years, new monitoring and
control systems were developed that make full use
of the available human and technical resources. The
progress in telemedicine systems has led to the
appearance and introduction of intelligent
monitoring systems that assist the physician with his
diagnoses (Bird, 1975). Researchers have opted for
the supervision of an ICU patient by a bedside
computer, which gathers, integrates, stores and
visualises in a clear way all the information that is
forwarded by the medical devices. These systems
can also be equipped with an intelligent component
that performs tasks such as the automatic
configuration of acquisition, alarm triggering,
devices control, etc. The generalisation of
communications networks has led to the integration
of the medical systems in data networks under the
supervision of a central system, following a
client/server architecture (Bashshur, 1975).
The here described ICU telemedicine system uses
com
munication networks (LAN, ADSL, ISDN, etc.
over TCP/IP) to connect the bedside acquisition
systems to a remote supervision system that
centralises and shows all the information that is
provided by the medical devices to the specialist,
and provides medical reasoning based on
independent knowledge based system (KBS) for
each patient. At the acquisition level or bedside
level, we have implemented the IEEE P-1073
Medical Information Bus (MIB) standard (Taboada,
1988).
All telemedicine systems, and especially those in
IC
Us, must dispose of multimedia applications that
facilitate as much as possible the collaboration with
the physician during the diagnosis (Bozios, 1995):
complete videoconferencing systems (video, audio
and collaborative whiteboard), the visualisation of
graphic archives such as X-rays, or the transmission
of files with any kind of relevant digital information
(e.g. clinical records), etc.
One of the main problems in monitoring ICUs is
th
e existence of strong temporal restrictions
(Stankovic, 1993), due to the need to continuously
update the data on vital parameters of the patient
(heart rate, arterial pressure, central veined pressure,
intracranial pressure, etc.). It is essential that we
guarantee acceptable response times for the
execution of tasks (mainly processing tasks). We
therefore try to make good use of the available
resources in the computers that are connected to the
network. It becomes obvious that, especially in
states of alarm, we will have to give transmission
priority to the data that proceed from the acquisition
devices, rather than to video and audio. Another
problem, related to the use of WANs (Wide Area
Network) on TCP/IP, is the limited capacity for the
regulation of bandwidth; this inconvenience was
avoided with compression techniques and an
intelligent queue management scheme in the
application level (Arcay, 2002).
70
Gómez A., Cantorna D., Dafonte C. and Arcay B. (2004).
FIPA-OS AGENTS APPLIED TO PROCESS SCHEDULING IN REAl TIME MONITORING.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 70-75
DOI: 10.5220/0001141000700075
Copyright
c
SciTePress

This paper shows the included control mechanism
that manages the tasks and their distribution between
the connected systems. We have opted for a control
mechanism based on Intelligent Agents technology,
which has proven to be very adequate for this kind
of tasks (Brenner, 1998) (Ferber, 1999). The
development language, Java, allows us to create a
multiplatform system that can be integrated into the
Hospital Information System (HIS). Moreover, the
bandwidth and the available resources will be better
distributed if we incorporate in each agent a rules
based knowledge system that decides which agent
and which computer are responsible for a specific
task (Gomez, 2000). This enables us to extend and
improve the task management system according to
the available resources of the network.
2 SYSTEM DESCRIPTION
One of the main problems with real-time monitoring
systems in ICU is the management and execution of
monitoring process tasks that require a great amount
of CPU and memory: mainly signal processing
tasks, image processing tasks, and database access
tasks. These systems have very important temporal
restrictions, and we need to guarantee the response
times of their execution. An adequate tasks manager
can assure the efficient use of the computers with
free resources by making them execute
simultaneously a larger number of specific tasks, or
by indicating the most adequate computer for a
concrete task. Efficient management of the available
resources enhances the performance of the whole
telemedicine system.
On the other hand, during the migration of the
network monitoring system that was originally
designed towards a telemedicine environment, we
noticed that our previous reasoning, based on
intelligent agents (Jennings, 1998), could also be a
valid approach for the bandwidth regulation
problem. The main work was focused on modifying
the rules-based system, so that it could also
efficiently manage the transmissions between all the
involved subsystems (bedside computers and central
system), acting on the state of the different
transmission channels.
The main objectives of this development are the
following:
The design of a communication mechanism, i.e. a
language based on standards, that allows us to cover
our message exchange needs.
The management of a platform of agents that are
distributed in the various devices of which the
network disposes. This platform allows us to know,
at any given moment and through its local agent, all
the agents that are distributed in the multiplatform
network (Windows, Linux, UNIX). Every agent
must know at each moment all the other agents that
are dispersed over the network, and efficiently detect
appearing or disappearing agents. These agents will
collect information on the characteristics of all the
computers that belong to the network, regularly run
tests on the capacity of the available data lines and
compile information on the data channels that are
established in the system. In our implementation, a
running agent resides in each computer.
The efficient management of the execution of the
specific tasks. To this effect, we need to implant a
priorities mechanism that is dynamically variable
and error tolerant (replicating executions whenever
possible). This Tasks manager uses the following
information: free and busy resources of each
computer; network congestion level; characteristics
of the requested and running tasks (required
computing power, amount of memory for the
execution, size of the used data to decide if their
transmission is feasible, evolution of the execution,
etc.).
The management of the data transmission
channels. This includes managing the priorities of all
the transmission threads; establishing delays in
determined transmission queues; regulating the
bandwidth consumed by the collaborative systems;
etc. These actions can be applied to outgoing or
incoming data, in the latter case by means of agent
messages. It is important for the agents to establish
communication with both the knowledge based
systems for the medical analysis (this will allow
them to know specific data needs and alarm
situations) and with the distinct execution threads
dedicated to the data transmission (to reconfigure
them). This Communications Manager uses the
following information: the state of all the active
transmission queues for each patient; the occupation
level of the queues and introduced delays; the
established quality for the collaborative system;
alarm states; available bandwidth; etc.
On the basis of the information provided by the
Tasks manager and the Communications Manager,
and the parameters that define a device (CPU;
memory; hard disk; etc.), we wrote the decision
rules that assign tasks to the devices according to the
resources that are available at each moment.
The graphical interface of each agent
continuously shows the devices (platform of agents)
and the tasks in which an agent is involved and the
parameters that are linked to each device and each
task. The interaction with this interface can be
merely informative (to learn about the functioning of
the agents platform), but it can also consist in
modifying the state of the network by hand (task
cancelling, disconnexion of an agent, etc.).
FIPA-OS AGENTS APPLIED TO PROCESS SCHEDULING IN REALTIME MONITORING
71

3 MATERIAL AND METHODS
The process control system is implanted through a
system of distributed agents based on the
specifications of the FIPA (FIPA, 2003), which
establishes the basic architecture for the
development of those agents.
The Foundation for Intelligent Physical Agents
(FIPA) is an international organisation dedicated to
promoting the industry of intelligent agents by
openly developing specifications that support
interoperability among agents and agent-based
systems. The primary focus of this FIPA Abstract
Architecture is to create semantically meaningful
message exchanges between agents that may be
using different messaging transports, different Agent
Communication Languages (ACLs), or different
content languages. Agent management provides the
normative framework within which FIPA agents
exist and operate. It establishes the logical reference
model for the creation, registration, location,
communication, migration and retirement of agents.
Each installation disposes of a component that
registers all the agents in the network with the
interface of the agents, Agent Management System.
To this effect, it uses the Localisation Service, which
makes it possible to locate the other agents during
the initiation and to detect the possible decrease or
increase of new agents by means of triggers. In case
of an increase, the new agent is registered; in case of
a decrease, it is eliminated from the Agent
Management System. The agents were implemented
with FIPA-OS components, and the communications
are established with a subset of ACL language.
FIPA-OS (FIPA-OS, 2003) is a component-
orientated toolkit for the construction of FIPA
compliant Agents through mandatory components
(i.e. components required by all the executable
FIPA-OS Agents), components with switchable
implementations, and optional components (i.e.
components that a FIPA-OS Agent can optionally
use). FIPA-OS tasks generally encapsulate some
functionality that forms a logical work unit (i.e.
search the DF, conduct a negotiation with another
Agent, or wait for a specific lapse of time). Tasks
can also be composed of sub-tasks so as to enable
more complex “units of work” that are sub-divisible
into smaller chunks of functionality. Tasks are based
upon event-based processing, where events are
delivered by the dynamic invocation of various
methods.
Each agent includes a KBS based on the
information that is collected either locally (from the
computer that executes the agent) or by
communicating with the other agents. The rules
system that is integrated into the agents was made
with the JESS expert system shell and scripting
language (JESS, 2003). Jess can be used in two
overlapping ways. Firstly, it can be a rule engine, a
special type of program that very efficiently applies
rules to data. In this case, they are said to constitute
an expert system. Among the newest applications of
expert systems are the reasoning part of intelligent
agents. But the Jess language is also a general-
purpose programming language, and furthermore, it
can directly access all Java classes and libraries
(Friedman-Hill, 2003).
Jess's rule engine uses an improved form of the
Rete algorithm (Forgy, 1982) to match rules against
the knowledge base. Jess is optimised for speed at
the cost of space. Jess is different than some Rete-
based systems in that it includes both a kind of
backwards chaining and a construct called defquery
which allows the user to make direct queries of the
knowledge base.
The implementation of the rules associated to the
task management was based on the characterisation
of the tasks (resources and temporal requirements
that are necessary for their execution) and on the
information that is compiled by the agents network.
3.1 Tasks Control
The Tasks Manager includes a priorities scheme that
is dynamically reconfigurable according to the needs
of medical KBS, patient state, physician requests,
etc. Possibilities like a task re-launch after the
detection of a missing agent or normal
disconnection, duplicated launch in extreme priority
conditions, and others, were implemented for some
concrete image processing tasks. The fact that each
agent is linked to a rules system that determines all
the executable actions, makes this implementation
possible.
The election mechanism of the various candidates
is very much influenced by the priority of the
processes. From less to more priority, the processes
were simplified and divided into 3 levels (0: low, 1:
normal and 2: high), which, according to the tests,
provide sufficient efficiency. We have followed the
general rule that a superior priority process that
surges at a given moment can cancel a lower priority
process that is already being executed. The selection
of the computer for a task of high priority consider
the total capacity of which it disposes, without
considering the current executions except if the alter
are also marked as having high priority. This process
will be re-launched after a new selection between
the remaining candidates. After a first candidates
selection, based on the necessary memory for the
process execution (physical and virtual), we pass on
to a successive refinement of the set of candidates,
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
72
until there is only one left. At that moment, the
system is informed about the decision, and the agent
sends the pertinent message for the start of the
execution.
3.2 Communications Control
The implementation of the Communications
Manager is based on the real-time management of
queues, multi-thread and with low TCP/IP
transmissions. This avoids the implementation of a
centralized events trigger (Schmidt, 1997), although
we did define mechanisms for the reconfiguration of
the system and the task handling.
When a new bedside PC (i.e. a new patient)
connects with the central system, initially the two
following connection channels are always
established:
Control and medical Analysis Information (CAI).
This transmission thread allows us to transmit and
receive information on the remote control of the
bedside PC from the central system, send the
information generated by the intelligent module of
the bedside PC (partial states obtained from the
physiological subsystems; analyses of stabilities;
alarms; etc.), and transfer messages between the
physicians.
Signals digitalised in Real Time (SRT). The
signals are compressed and transmitted to the
Central System for each acquisition of an
intermediate storage or buffer in the bedside
communications controller (BCC).
Both execution threads for data transmission are
established with high priority. The SRT and CAI
channels are considered essential for the functioning
of the system, since they allow a minimally
acceptable monitoring, and let the central system
dispose of information on physiological parameters,
alarms in the acquisition system, tendency studies,
etc. In fact, in the worst case, the CAI queue is
always maintained because the supported traffic is
minimal and informs us on the state of the remote
patient.
During the course of the monitoring, any of the
two nodes that maintain the communication may
solicit a communication channel of the TDI type
(Transmission of Digitalised Information, a generic
channel for digitalised files), or establish a channel
for the Collaborative System (CS) through the
developed environment. These two transmission
threads will initially be executed with normal
priority. It is important to note that the execution of
the CS will not be allowed if the measurement of the
available bandwidth, made by the agents, indicates a
bandwidth of less than 40Kbps.
Obviously, these different communication
channels do not have the same priority, and they can
change depending on the state of the patient, the
state of the data network, the needs of the physician,
etc. The designed mechanism functions on the
application level, and is the only one that can work
in such a heterogeneous environment, allowing all
types of connections and with no more limitations
than those imposed by the available bandwidth. We
will impose these limitations through the proposed
mechanism, reducing the functionality of the system
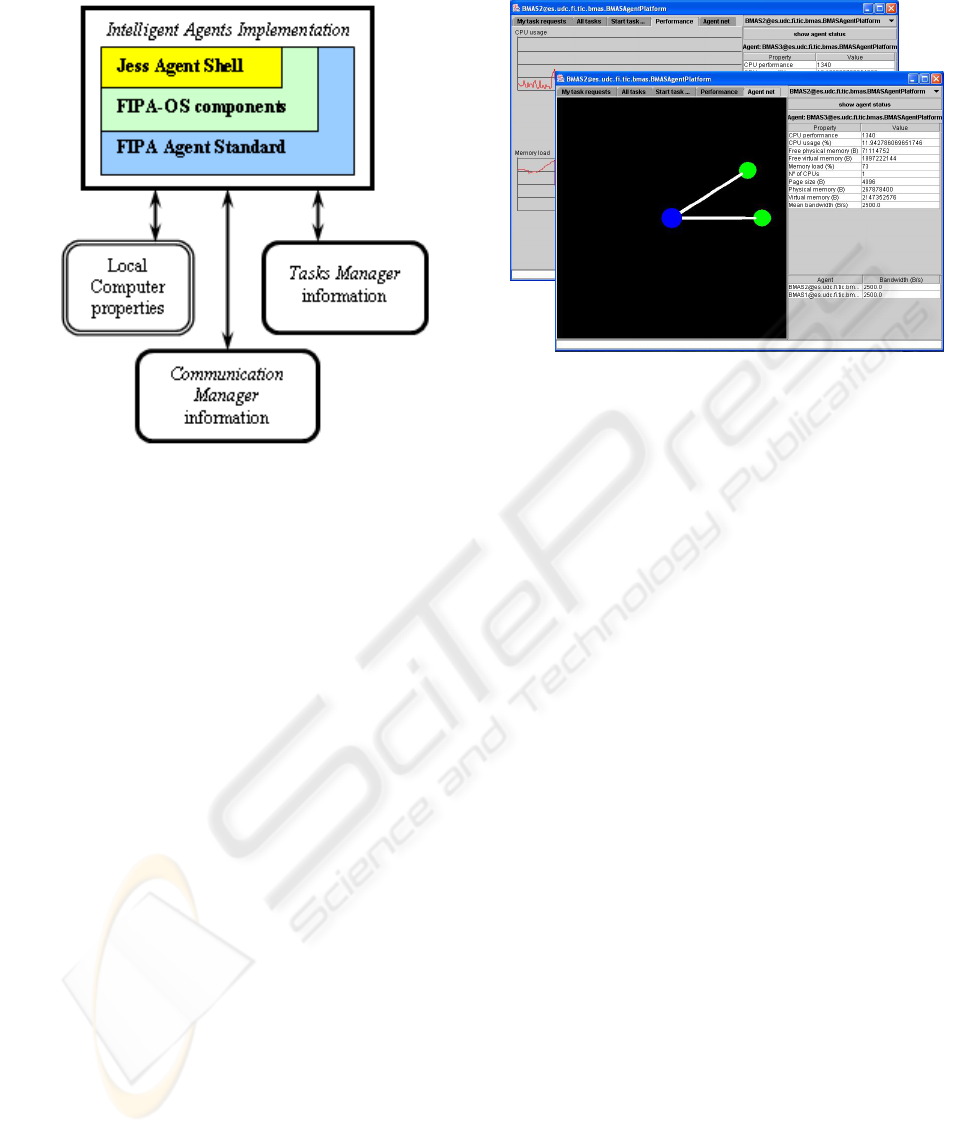
Figure 2: Agent control interface.
Figure 1: Tasks control scheme.
FIPA-OS AGENTS APPLIED TO PROCESS SCHEDULING IN REALTIME MONITORING
73

as much as necessary so as to make a certain level of
medical monitoring possible.
3.3 Visualisation Interface
The agents control interface was implemented with
JFC (Java Foundation Classes) Swing components
and the API Java 3D (JAVA 3D, 2003) component
for the tridimensional representation of the agents
network.
The Java 3D API provides a set of object-oriented
interfaces that support a simple, high-level
programming model that can be used to build,
render, and control the behaviour of 3D objects and
visual environments (Sowrizal, 1998).
The control system that was developed for each
agent possesses a user interface that is equipped with
a series of functionalities, which allow us to interact
and follow the behaviour of the agents network and
the tasks that are being executed at each moment.
This interface consists of a main panel that
visualises the agents network in a 3D graphic.
(Figure 2), shows the output of the local computer,
allows to trigger a task and to see the information of
all the tasks of the agents system, and shows
information on the tasks that were requested by the
telemedicine system or by the user himself.
Some of the parameters that show information on
the selected agent are the following: CPU
performance; CPU usage; Free physical memory;
Free virtual memory; Memory load; Number of
CPUs; Page size; Physical memory; Virtual
memory; Mean bandwidth; etc.
A list inside the interface shows the bandwidth
between the selected agent and all the other agents
of the system.
The agents are represented as circular objects
whose colour indicates the type: blue is the local
agent, green is a remote active agent, and red is a
remote inactive agent.
The bandwidth between two agents is represented
by a cylindric line that connects them. The thickness
of the cylinder depends on the bandwidth between
the agents, estimated in real time: a thicker cylinder
indicates more available bandwidth. These links also
follow a colour classification that clearly indicates
the available bandwidth: red is low bandwidth, blue
is normal bandwidth, green is high bandwidth, and
white is very high bandwidth.
Inside the 3D interface, the agents are positioned
around an invisible sphere to avoid that the links
pass through other agents, and to enhance the
visualisation when a large collection of agents is
active. The user can interact with the virtual world
through certain actions, such as movements,
displacements, zooms, rotations, agents selections,
etc.
When an agent is selected, the system shows his
data (state and characteristics).
Finally, if the user wishes to carry out tests from
the interface, he can directly request the execution of
a task to the agents system and determine the
parameters (e.g.: priority, estimation of CPU use,
estimation of memory use, etc.).
4 CONCLUSIONS
This article describes a telemedicine system that is
designed to acquire, monitor and control the clinical
evolution of ICU patients. Our system follows a
client/server architecture, which means that it
consists of two related but independent subsystems:
the local subsystem and the central remote
subsystem. Both subsystems are equipped with a
series of multimedia options that improve the global
system (videoconferencing communication;
collaborative whiteboard; transmission of files; etc.).
Since our telemedicine monitoring system for
ICUs requires a great quantity of data
communications and processing tasks, with
considerable temporal restrictions (real time), we
have developed a tasks manager (by means of an
intelligent agents technology). This module provides
the following advantages:
The agent network manages and distributes the
tasks by means of a KBS inside each agent. In this
way, concurrence can be increased and execution
time decreased.
The agents system is able to regulate the
bandwidths needed for the medical network
monitoring system, by managing the priorities
dynamically and by adapting to the autonomously
available technologies.
In the global medical monitoring system, the
agents include the capacity to react in case of
asynchronous events such as changes in the task
priorities requested by the physician; cancellation of
tasks; changes in network capacity; medical alarms;
etc. We have foreseen possible concurrence
problems by synchronising the accesses to shared
resources, by creating copies of these resources, and
by determining that certain objects cannot be
modified once they are created and initialised.
The system disposes of a graphic user interface
that allows us to monitor the state of the agents
network, and to easily execute and eliminate tasks.
The decision mechanism (rules system) was
developed in the knowledge that certain hardware
elements (CPU; memory; etc.) evolve very rapidly,
which inevitably requires changes in the rules. We
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
74

therefore include the possibility to modify the basic
system configuration and to specify changes in the
value ranges of the semantic labels without having
to change the rules nor the classes.
REFERENCES
Arcay, B., Dafonte, C., Taboada, J.A., 2002. Database
Based Reasoning for Real Time Monitoring and Data
Analysis, Encyclopedia of Microcomputers. Marcel
Dekker Inc, 26(1):73-103.
Bashshur, R.L., Armstrong, P.A., Youssef, Z.I., 1975.
Telemedicine: Explorations in the use of
telecommunications in health care. Telemedicine:
Explorations in the use of telecommunications in
health care, Charles C. Thomas, Springfield, Illinois.
Bird, K.T., 1975. Telemedicine; concept and practice. In:
R.L. Bashur, P.A. Armstrong and Z.I. Youssef (eds.),
Telemedicine; explorations in the use of
telecommunication in health care, Springfield, Illinois.
Bozios, E., Pangalos, G., Pomportsis, A., 1995. Evolution
of hospital communication systems towards
multimedia applications, Medical Informatics,
20(1):53-66.
Brenner, W., Zarnekow, R., Wittig, H., 1998. Intelligent
Software Agents, Foundations and Applications,
Springer Verlag, Berlin, Germany.
Dafonte, C., Gómez, A., Arcay, B., Taboada, J.A., 2000.
Intelligent Management of Processes in a ICU
Telemedicine System, Chicago 2000 World Congress
on Medical Physics and Biomedical Engineering,
Chicago, U.S.A.
FIPA Standard, 2003. Available in: http://www.fipa.org
FIPA-OS toolkit, 2003. http://fipa-os.sourceforge.net
Ferber, J., 1999. Multi-Agent Systems, An Introduction to
Distributed Artificial Intelligence, Addison Wesley.
Forgy, C.L., 1982. Rete: A fast algorithm for the many
pattern/many object pattern match problem. Artificial
Intelligence, 19(1):17-37.
Friedman-Hill, E.J., 2003. Jess, the Expert System Shell
for the Java Platform, Distributed Computing
Systems, Sandia National Laboratories, Livermore,
California, U.S.A..
Gomez, A., Dafonte, C., Arcay, B., Santos, A., 2000.
Intelligent system for the acquisition and
telemonitoring in intensive care units, Proc. 18th
IASTED International Conference: Applied
Informatics, 397-401.
Gomez, A., Dafonte, C., Arcay, B., Castro, A., Pereira, J.,
2002. Real-Time 3D Monitoring for Telemedicine in
Critical Units, 2nd European Medical & Biological E
ngineering Conference (EMBEC 2002).
JAVA 3D Specification v.1.3, 2003. Available in:
http://java.sun.com/products/java-media/3D/index.jsp
JESS v.6.1RC1, 2003. http://herzberg.ca.sandia.gov/jess
Jennings, N.R, Wooldridge, M., 1998. Applications of
Intelligent Agents, Agent Technology Foundations,
Applications, and Markets. Springer-Verlag.
Rezazadeh, M., Evans, N.E., 1988. Remote vital signs
monitor using a dial-up telephone line, Med. & Biol.
Eng. & Computing, 26 (5):557-561.
Schmidt, D.C, Fayal, M.E., 1997. Lessons learned
building reusable OO frameworks for distributed
software. Communications of the ACM, 40(10):85-87.
Shoham, Y., 1993. Agent-oriented programming. Artificial
Intelligence, 60(1):51-92.
Sowrizal, H., Rushforth, K., Deering, M., 1998. The Java
3D API Specification, Addison Wesley.
Stankovic, J.A., Ramamritham, 1993. Hard Real-Time
Systems: A Tutorial, Computer Society Press of IEEE,
1730, Massachussets Avenue, Washington D.C.
Taboada, J.A, Arcay, B, Arias, J.E., 1988. Real time
monitoring and analysis via the medical information
bus. Med. & Biol. Eng. & Comp., 35(1):528-534.
FIPA-OS AGENTS APPLIED TO PROCESS SCHEDULING IN REALTIME MONITORING
75
