
A MOBILE ROBOT MAPPING SYSTEM WITH AN
INFORMATION-BASED EXPLORATION STRATEGY
Francesco Amigoni, Vincenzo Caglioti, Umberto Galtarossa
Dipartimento di Elettronica e Informazione, Politecnico di Milano
Keywords:
Robot Mapping. Exploration Strategies. Relative Entropy. Laser Range Scanner.
Abstract:
The availability of efficient mapping systems to produce accurate representations of initially unknown envi-
ronments is undoubtedly one of the main requirements for autonomous mobile robots. This paper presents a
mapping system that has been implemented on a mobile robot equipped with a laser range scanner. The system
builds geometrical maps of the environment employing an exploration strategy that takes into account both
the distance travelled and the information gathered to determining the observation positions. This strategy is
based on stronger mathematical foundations than the exploration strategies proposed in literature: this is the
distinctive feature of our approach and constitutes the main original contribution of this paper.
1 INTRODUCTION
The availability of the maps of the environments
where they operate is undoubtedly one of the main
requirements for autonomous mobile robots (Thrun,
2002). To be efficient, an autonomous robot needs
an effective mapping system that incrementally builds
the map of an environment by determining the
most interesting observation positions in the partially
known environment.
This paper presents a mapping system that has been
implemented on a mobile robot equipped with a laser
range scanner. The proposed system builds point-
based geometrical maps of the environment employ-
ing an exploration strategy that, in the determination
of the observation positions, takes into account both
the distance travelled and the information gathered.
This exploration strategy implements the criterion in-
troduced in (Amigoni and Caglioti, 2003). The strong
mathematical foundations of the implemented explo-
ration strategy, based on the concept of relative en-
tropy (Shore, 1984; Caglioti, 2001), are the distinc-
tive feature of our approach and constitutes the main
original contribution of this paper.
The mapping system proposed in this paper itera-
tively performs the three following activities:
• building a partial map that represents the portion of
the environment surrounding the robot,
• updating the global map according to the newly ac-
quired partial map and, at the same time, localizing
the robot within the global map, and
• determining and reaching the next observation po-
sition, according to the exploration strategy.
As a consequence, the robot reaches a sequence of
observation positions: at each observation position it
performs a 360 degrees scan of the environment and
updates the current global map. We assume that the
robot moves on a flat 2D surface and that obstacles
are at the height of the laser range scanner. The se-
quence of the robot observation positions is the result
of the exploration strategy. For simplicity, a greedy
approach is followed: at each step, just the next ob-
servation position is planned. In correspondence to
each measurement, the information about the map is
updated, as well as the information about the free
space. The next robot observation position is then
determined within the currently known free space.
We experimentally tested and validated the proposed
mapping system in heterogeneous environments.
This paper is organized as follows. The next sec-
tion surveys the most important robot map building
results and exploration strategies discussed in litera-
ture. In Section 3 we describe the proposed mapping
system, which is experimentally validated in Section
4. Finally, Section 5 concludes the paper.
71
Amigoni F., Caglioti V. and Galtarossa U. (2004).
A MOBILE ROBOT MAPPING SYSTEM WITH AN INFORMATION-BASED EXPLORATION STRATEGY.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 71-78
DOI: 10.5220/0001141900710078
Copyright
c
SciTePress

2 ROBOT MAP BUILDING
The design of a mapping system is usually strongly
influenced by the specific sensors used. In the sys-
tem described in this paper we employ a laser range
scanner sensor (like (Gonz
´
ales-Ba
˜
nos and Latombe,
2002; Kwon and S.Lee, 1999; Lu and Milios, 1997)).
In general, the mapping activity is characterized by
the type of the map the robot produces, namely by
the way in which the acquired information about ob-
stacles and free space is represented. One can dis-
tinguish between geometrical and topological maps.
Geometrical maps can be composed of grids (Thrun,
2001; Burgard et al., 2000), points (Lu and Milios,
1997), or segments (Austin and McCarragher, 2001;
Gonz
´
ales-Ba
˜
nos and Latombe, 2002). Point and seg-
ment maps have usually two main advantages over the
grid-based approaches: firstly, they are a much more
compact representation of the environment and, sec-
ondly, they are easier to use. The mapping system
proposed in this paper uses a representation of the ob-
stacles as sets of points on the obstacle contour. This
approach allows a simple update of the map as new
information is acquired by the laser range scanner.
The global map of an environment is incrementally
built by integrating partial maps on the basis of the
(probabilistic) estimated positions of the robot (Thrun
et al., 2000), of the geometrical features of the maps
(Lu and Milios, 1997), or of a mixture of the two ap-
proaches. Thus, in almost all cases, it is important
that, during the exploration, the robot is able to lo-
calize itself not only by odometry, but also by de-
tecting landmarks or by matching data with an ex-
isting model of the environment. Indeed, techniques
for Simultaneous Localization And Mapping (SLAM)
(Dissanayake et al., 2001) and for Concurrent Map-
ping and Localization (CML) (Thrun et al., 1998)
have been extensively studied. In our approach the
robot matches the geometrical features of the maps to
correct the estimation of its pose provided by odome-
try.
The exploration strategies usually aim at reducing
the exploration time, by making a small number of
exploration steps, while trying to reduce the error, by
balancing the sensory information with the navigation
cost to reach the observation positions. Since one of
the main contributions of this paper is the implemen-
tation of an innovative theoretically well-founded so-
lution to the problem of determining the next best ob-
servation position, also known as the Next Best View
(NBV) problem, in the following we compare our ap-
proach with some significant techniques proposed in
literature. (Gonz
´
ales-Ba
˜
nos et al., 2000; Gonz
´
ales-
Ba
˜
nos and Latombe, 2002) describes an exploration
method based on segment maps. Candidate NBV po-
sitions are generated across the edge of the explored
regions, in which the robot is guaranteed to move
without collisions risk. To decide whether a candi-
date position in the free space is a good NBV position,
the amount of new information about the environment
that could be obtained from the candidate position is
estimated. More precisely, the evaluation of a candi-
date position q given by
g(q) = A(q) · exp(−λ · L(q))
where A(q) is an estimation of the unexplored area
visible from q, L(q) is the length of the path con-
necting the current robot position and q, and λ (set
to 20
−1
cm) weights the new information obtainable
from a candidate and the cost of travelling to reach
the position. The best candidate will minimize the
function g(q). Although extensive experimental re-
sults validated the effectiveness of the above criterion,
its theoretical bases are not well defined. For exam-
ple, the use of the exponential function in evaluating
the worthiness of a position and the value of the λ pa-
rameter are not theoretically justified. The criterion
proposed in this paper overcomes this limitation since
it has stronger mathematical bases.
The probabilistic approach proposed in (Burgard
et al., 2000) coordinates the exploration activities
of multiple robots in order to minimize the overall
exploration time. In this case, grid maps are em-
ployed and the cell in which a robot should move next
is the one that maximizes the difference between a
(probabilistic-based) measure of expected utility and
the path cost. Differently from our proposal, also
this criterion lacks of strong theoretical foundations;
moreover, it naturally applies to grid maps and its
extension to the more compact point maps is not
straightforward.
Finally, in (Sim and Dudek, 2003), a number of ex-
ploration policies (paths followed by the robot dur-
ing mapping) are evaluated for efficiency. Although
mathematically well-founded on Kalman filtering the-
ory, this work differs from our approach since it does
not evaluate only the next observation position but
a whole set of pre-determined observation positions
along a path.
3 THE PROPOSED MAPPING
SYSTEM
The mapping system proposed in this paper tries to
find an optimal exploration path by determining at
each iteration the next best observation position. The
robot performs the mapping process taking scans of
the environment and using them to update a world
model and to localize itself. A scan is composed of
a list of points that represent the outline of the world
objects within the range of the laser range scanner.
ICINCO 2004 - ROBOTICS AND AUTOMATION
72

This sensor acquires a sequence of distance measure-
ments, along directions separated by a programmable
angle (one degree, in our experiments) sweeping an
angle of 180 degrees; thus it returns 180 measure-
ments per scan. A map is obtained by integrating
scans and is composed of a set of points that describe
the environment. In our implementation, the map is
a list of points. A point is a triple (x, y, σ
p
), where
x and y are the coordinates of the point with respect
to a reference system and σ
p
is the standard deviation
that represents the uncertainty affecting the measure-
ment of the point, due to the sensor accuracy and to
the uncertainty of the robot position. The reference
frame in which the coordinates of the points are ex-
pressed is centered on the laser range scanner. This
means that the coordinates of the points composing
the global map built so far are updated at every robot
movement. After a movement, the position of the
robot is estimated using odometry and then refined
using a scan matching algorithm. In more detail, the
mapping process goes as follows.
(1) From its current position, the robot constructs
a partial map m
k
of the environment, taking four
consecutive scans (with headings separated by 90 de-
grees) of the surroundings. The four scans are aligned
and their points fused. Let us illustrate this activity
in more detail starting from the alignment procedure.
The transformation (rotation and translation) to align
two scans s and s
0
(and in general two maps m and
m
0
) is calculated in the following way. The odome-
try readings give a first approximation t
o
of the align-
ment transformation; t
o
is applied to s to bring its
reference frame in the reference frame of s
0
, obtain-
ing s
t
o
. Then the alignment provided by t
o
is refined
by using the iterative algorithm described in (Lu and
Milios, 1997) that matches the geometrical features
of the two scans. This algorithm, called alignment al-
gorithm in the following, finds pairs of corresponding
points in the two partially aligned scans (s
t
o
and s
0
)
and then computes a least-square solution of the rel-
ative rotation and translation. The process is iterated
until it converges. A threshold is used to discard pairs
of points that are too far. In our experimental activity,
this threshold has been set to r
max
/10, where r
max
is the range of the laser range scanner. The align-
ment algorithm is applied to the first two scans, then
to the result of their alignment and to the third scan,
and, finally, to the results of this last alignment and
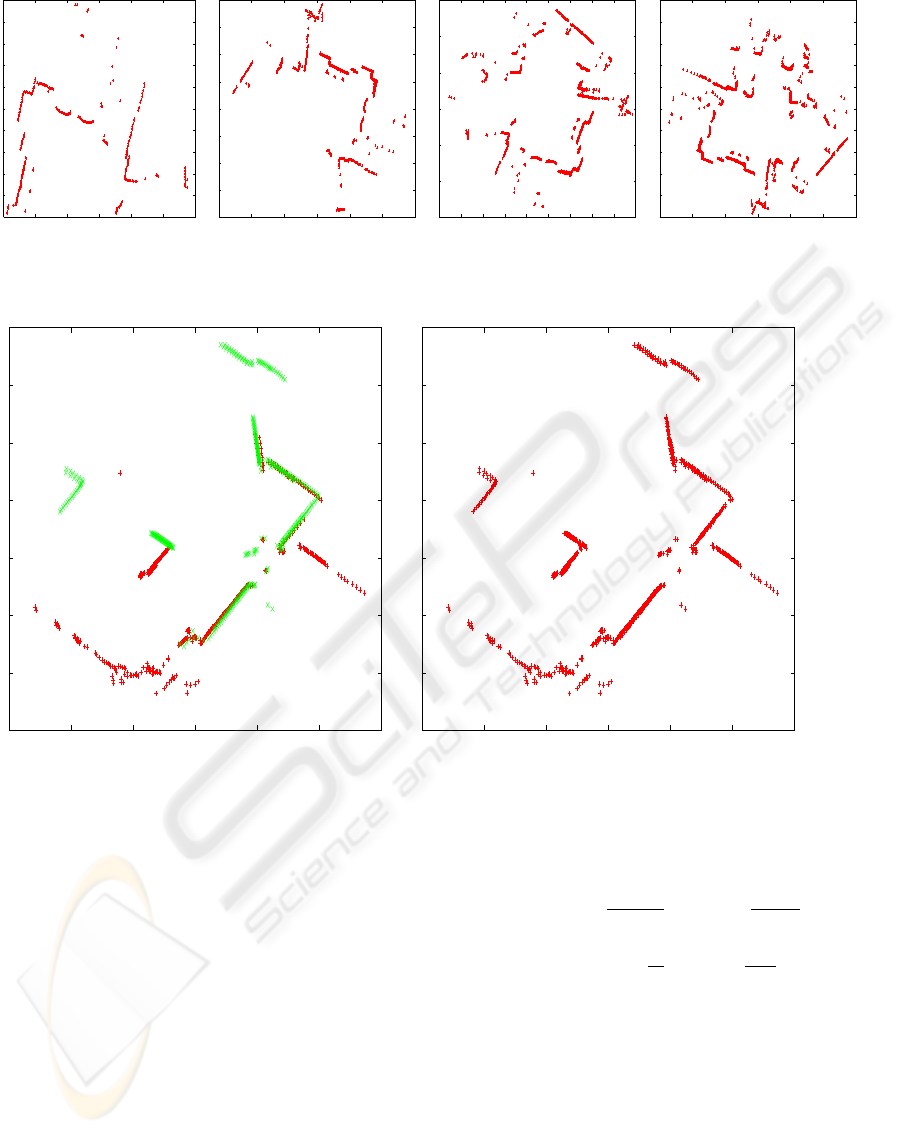
to fourth scan (the whole process is shown in Fig. 1).
We now turn to the illustration of the fusion of points.
The fusion of the points of a partial map is necessary
since, usually, sets of points in different scans repre-
sent the same object of the environment and thus they
produce redundant information if plainly inserted in
the partial map m
k
. To simplify the partial map we
use the clustering algorithm reported in (Dobkin and
Tal, 2001; de Berg et al., 2004). In general, this algo-
rithm, called fusion algorithm in the following, finds
the pairs of closest points belonging to a map and re-
places them with their midpoints. Also in this case,
a threshold (set to r
max
/10) discards the pairs whose
points are too far. The fusion algorithm is applied to
the result of the alignment of the four scans in order
to obtain the partial map m
k
representing the environ-
ment surrounding the current position of the robot.
(2) The current global map M
k
is updated by
adding m
k
and obtaining M
k+1
. A first estimation of
the transformation t
k
that aligns the reference frame
of M
k
to the reference frame of m
k
(recall that the
points of the global map are expressed in the reference
frame centered on the robot sensor) is calculated start-
ing from the odometry readings that give the trans-
formation t
k,o
between the previous observation pose
and the current observation pose. This estimate is im-
proved by applying the alignment algorithm to M
t
k,o
k
(namely to M
k
transformed according to t
k,o
) and to
m
k
. Then the fusion algorithm is applied to the por-
tion of the resulting global map composed of points
of m
k
and M
k
that represent the same objects in the
environment, namely to the points of m
k
and M
k
are
closer than r
max
/10 (see Fig. 2). The points in m
k
that do not have any correspondent in M
k
are simply
added to M
k+1
.
(3) The candidate observation positions are gener-
ated in the current global map. We implemented two
methods to generate the candidate observation posi-
tions:
• evenly-separated candidates are generated along a
circle with radius r = r
max
/2 and center in the
current position of the robot,
• the candidates are randomly generated within a cir-
cular rim (with r
max
/3 ≤ r ≤ 2 ∗ r
max
/3 and
center in the current position of the robot).
(4) We discard the unreachable candidates, namely
the candidates that cannot be reached by a collision-
free path from the current position of the robot. We
consider only paths that are composed of an initial ro-
tation and of a forward straight movement. A path
is collision-free for the robot if the robot does not
intersect any point of the map while moving along
the path. Once the unreachable candidates have been
eliminated, the remaining candidate observation posi-
tions are evaluated. The evaluation of the candidates
is performed according to the criterion presented in
(Amigoni and Caglioti, 2003), on which our explo-
ration strategy is based. This criterion is briefly illus-
trated in the following (omitting the technical details).
It refers to the concept of relative entropy (Shore,
1984; Caglioti, 2001):
H
f
= −
Z
f(X) ln
f(X)
f
0
(X)
dX
A MOBILE ROBOT MAPPING SYSTEM WITH AN INFORMATION-BASED EXPLORATION STRATEGY
73
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
-2 -1 0 1 2 3 4
-4
-3
-2
-1
0
1
2
3
4
-6 -4 -2 0 2 4 6
-6
-4
-2
0
2
4
6
-5 -4 -3 -2 -1 0 1 2 3 4
-4
-3
-2
-1
0
1
2
3
4
5
6
-6 -4 -2 0 2 4 6
Figure 1: The construction of a partial map of a scattered environment obtained by aligning four scans (points of the map are
represented as crosses, the current position of the robot is (0, 0), scales are in meters)
-8
-6
-4
-2
0
2
4
6
-6 -4 -2 0 2 4 6
-8
-6
-4
-2
0
2
4
6
-6 -4 -2 0 2 4 6
Figure 2: A global map (red) aligned with a partial map (green) before (left) and after (right) the application of the fusion
algorithm
where X is a vector collecting the position parame-
ters of the sample points of the map, f is the proba-
bility distribution function (PDF) of the values of X,
and f
0
(X) is the so-called non-informative PDF that
can be assumed to be uniform (Tarantola, 1986). The
expected increment of the relative entropy can be cal-
culated given the current information on the map, de-
scribed by a priori distribution f(X), and given the a
posteriori distribution f
0
(X) after the measurement.
Exploiting the additivity of relative entropy, the fol-
lowing formula to calculate the expected variation of
relative entropy (if a measurement is performed) is
obtained:
E[∆H] ≈
1
A + N
X
i∈A∪N
ln
σ
unc,i
σ
+
N ln
σ
P
+
X
i∈A
ln
σ
σ
p,i
where A is the set of the already scanned points that
the robot will see from a candidate position (A =
|A|), N is the set of new sensed points (N = |N |),
σ
p,i
is the prior standard deviation at the already
sensed point i, σ
unc,i
is the standard deviation of the
contribution to the measurement error due to the robot
position error, σ is the sensor accuracy, and P is the
(expected) total length of the map. Note that the terms
of the sum in the right hand side of the above formula
refer to uncertainty produced by the robot position er-
ror, to uncertainty of the new sensed points, and to
ICINCO 2004 - ROBOTICS AND AUTOMATION
74

uncertainty of the already sensed points, respectively.
In our experimental activity, given a candidate obser-
vation position q, the values of the parameters in the
above formula are calculated as follows:
• A is the set of points of M
k+1
that fall within the
range of the laser sensor when the robot takes four
scans in q (see step (1));
• N is calculated as N = N
k
− A, where N
k
is
the number of points composing m
k
; the implicit
assumption here is that the environment is enough
regular so that the number of points composing the
partial maps built at different iterations is similar;
• σ
unc,i
is equal to V
θ
d
2
+ V
xy
, where V
θ
is the ex-
pected error in the rotational position of the robot
in q, d is the distance between the current position
of the robot and q, and V
xy
is the expected error in
the translational position of the robot in q;
• σ = 0.0001;
• P = 20 m;
• σ
p,i
is set equal to 2σ, assuming that the alignment
algorithm works perfectly.
Once the robot has reached a new observation posi-
tion, the uncertainty on its pose is subject to two oppo-
site trends: uncertainty would increase due to odom-
etry estimation errors; uncertainty would decrease if
parts of the map already scanned are included in the
set of points to be sensed. To select the next observa-
tion position, the criterion J is calculated:
J = E[∆H] +
∆C + a
σ
ln
∆C + a
σ
where ∆C is the travelled distance to reach the candi-
date position and a is the length of the map covered by
a single scan (note that a is related to r
max
). Low val-
ues of J identify the best observation positions. The
value of J is calculated for every candidate observa-
tion position, and the one with the lowest value is se-
lected.
(5) The robot moves to the selected observation
position and the process re-starts from step (1) with
iteration k + 1. The mapping process ends when
there are no reachable observation positions, when the
robot could not make a 360 turn to take the four scans
needed for building the partial map, or when a given
number of exploration steps has been reached.
We explicitly note that, in order to determine the
next best observation position, our exploration strat-
egy blends together the distance travelled by the robot
to reach the position and the expected information
gathered by the sensing activity. This information is
relative both to the new points that are visible from
the observation position and to the reduction of un-
certainty on the already sensed points. This second
component of information is fundamental since it en-
ables the construction of accurate maps and improves
the localization of the robot; however, it is seldom
considered in the exploration strategies presented in
literature.
4 EXPERIMENTAL RESULTS
We have implemented the above mapping system
(coded in C++) on a mobile robot based on a Robuter
mobile platform equipped with a SICK LMS200 laser
range scanner.
In the experimental activity we tested the correct-
ness and the efficiency of the proposed mapping sys-
tem. For example, Fig. 3 shows a mapping process
that built the map of a part of an environment (with
r
max
= 3 m). It can be seen that the robot follows a
“reasonable” path, each time moving toward the un-
known part of the environment, where it is likely to
obtain more information.
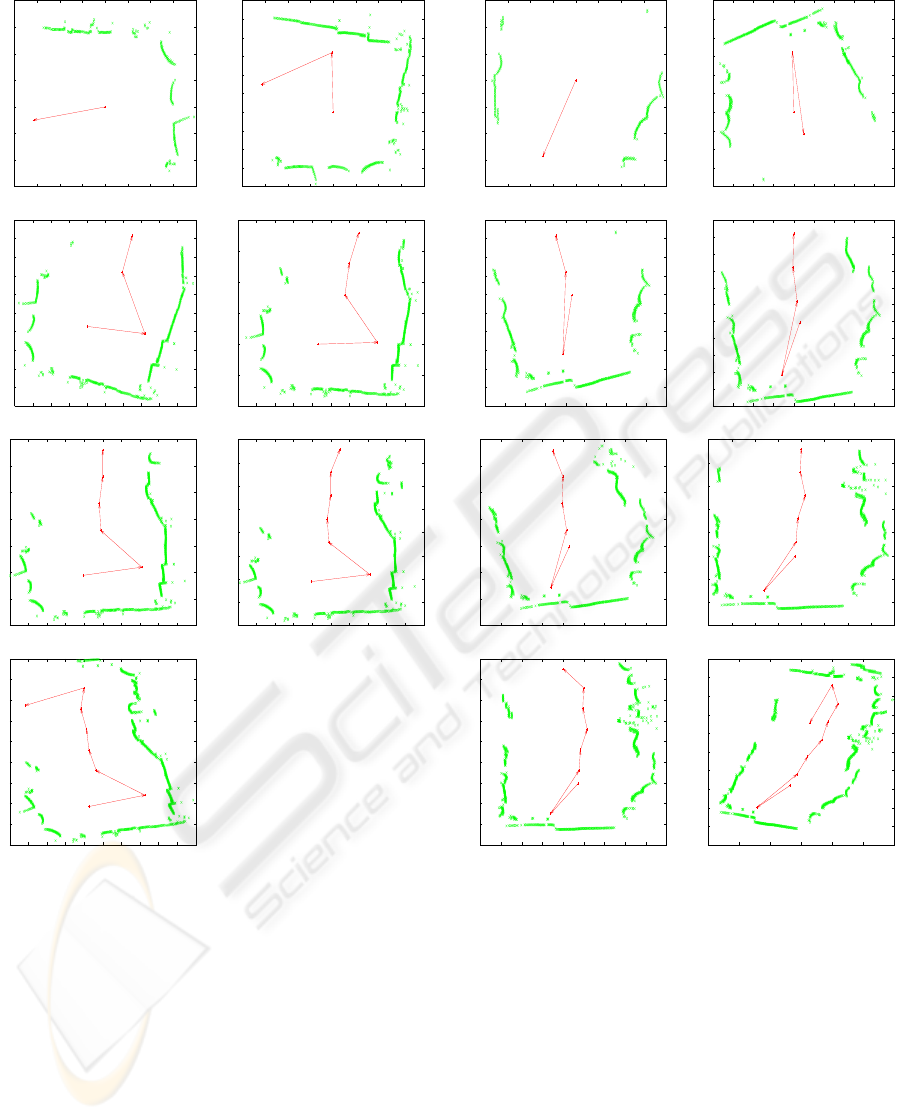
Figs. 4 and 5 show that the number of exploration
steps needed to map an environment with our map-
ping system decreases when the range of the laser
range scanner increases. This means that the proposed
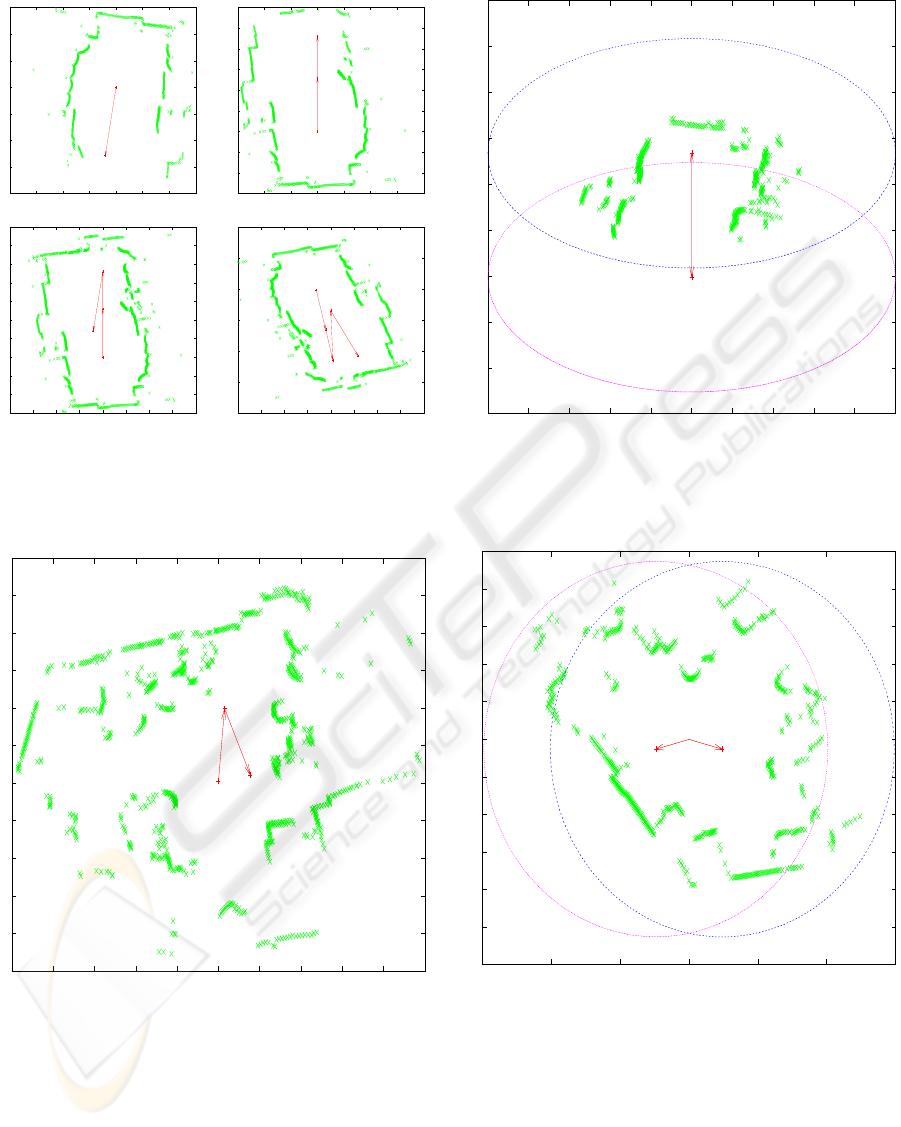
mapping system is “sound”. Fig. 6 shows that indoor
environments, like large rooms, can be mapped in few
steps.
The above examples show that the robot safely
moves in the already explored environment to reach
new observation positions that improve the knowl-
edge about the environment. The balance between the
travelled distance and the expected information to be
acquired in a candidate observation position is a dis-
tinctive feature of our approach. In Fig. 7 we show
that, when two candidates are expected to provide the
same amount of information (H values are similar),
the one that is closest (C small) to the current posi-
tion of the robot is selected (lowest value of J). On
the other hand, in Fig. 8, we show that, when a candi-
date position is expected to provide a greater amount
of information than the other one and both candidates
are at the same distance from the current position of
the robot, the first one is selected.
The examples of Figs. 3, 4, 5, and 6 have been ob-
tained by generating the candidates along a circle (re-
call step (3) of the previous section). This method
produces a regular distribution of the candidates that
usually allows the robot to navigate through narrow
passages (Fig. 9 (left)); it is thus appropriate for map-
ping scattered environments. On the other hand, the
random generation of candidates works well in open
environments (Fig. 9 (right)).
Finally, in Fig. 10, we schematically show a prob-
lem arising because of the greedy policy we use to
select the candidate positions. In this case, the can-
didate on the right is selected because it is “locally”
optimal. However, the candidate on the left is “glob-
A MOBILE ROBOT MAPPING SYSTEM WITH AN INFORMATION-BASED EXPLORATION STRATEGY
75
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-4
-3
-2
-1
0
1
2
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-5
-4
-3
-2
-1
0
1
2
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-6
-5
-4
-3
-2
-1
0
1
2
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-7
-6
-5
-4
-3
-2
-1
0
1
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3
Figure 3: A sequence of observation positions reached by
the robot (left to right and top to bottom)
ally” optimal (it could represent the first observation
position determined by a global exploration strategy)
since it provides a first view over a large unexplored
area.
5 CONCLUSIONS
In this paper we have presented a mapping system
that allows a mobile robot equipped with a laser range
scanner to incrementally build the map of an unknown
environment. The proposed system produces point
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-5
-4
-3
-2
-1
0
1
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-6
-5
-4
-3
-2
-1
0
1
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-7
-6
-5
-4
-3
-2
-1
0
1
2
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-8
-7
-6
-5
-4
-3
-2
-1
0
1
2
-4 -3 -2 -1 0 1 2
Figure 4: A sequence of observation positions reached by
the robot with r
max
= 3 m
maps that are suitable for the safe navigation of the
robot in the partially known environment. The em-
ployed exploration strategy blends together gathered
information and cost of reaching observation posi-
tions. Experimental results show “reasonable” explo-
ration behavior in incremental map construction.
Future research work will address the more pre-
cise quantitative evaluation of the efficiency of our
approach and the extension of the system proposed in
this paper to multirobot cases, in which teams of mo-
bile robots cooperatively build the map of an environ-
ment, maybe exploiting different kinds of sensors. Fi-
ICINCO 2004 - ROBOTICS AND AUTOMATION
76
-4
-3
-2
-1
0
1
2
3
-4 -3 -2 -1 0 1 2 3
-5
-4
-3
-2
-1
0
1
2
3
4
-3 -2 -1 0 1 2 3 4
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
-4 -3 -2 -1 0 1 2 3 4
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
Figure 5: A sequence of observation positions reached by
the robot with r
max
= 4 m
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
-5 -4 -3 -2 -1 0 1 2 3 4 5
Figure 6: A sequence of observation positions reached by
the robot with r
max
= 5 m
nally, we aim to extend the information-based explo-
ration strategy – employed in this paper for mapping
unknown environments – to other perception tasks,
such as the monitoring of the electro-magnetic fields
over an area.
-10
-8
-6
-4
-2
0
2
4
6
8
-5 -4 -3 -2 -1 0 1 2 3 4 5
A = 95
N = 870
C = 1.35
H = -6641.99
J = -5979.78
A = 0
N = 965
C = 4.05
H = -7330.49
J = -4898.91
Figure 7: Candidate evaluation (the meaning of the symbols
is explained in Section 3)
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
-6 -4 -2 0 2 4 6
A = 232
N = 1073
C = 1.00
H = -7487.78
J = -1365.63
A = 268
N = 1037
C = 1.00
H = -7254.07
J = -1131.92
Figure 8: Another candidate evaluation
ACKNOWLEDGEMENT
The authors would like to thank Vittorio Riga-
monti for the initial implementation of the system.
Francesco Amigoni and Vincenzo Caglioti were par-
tially supported by MIUR under APE Project grant.
A MOBILE ROBOT MAPPING SYSTEM WITH AN INFORMATION-BASED EXPLORATION STRATEGY
77

-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5
-5
-4
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
Figure 9: Generation of candidates
"local" best observation position
"global" best observation position
Figure 10: Greedy selection of candidates, dashed lines are
walls not yet perceived by the robot
REFERENCES
Amigoni, F. and Caglioti, V. (2003). An information-based
criterion for efficient robot map building. In Proceed-
ings of the IEEE International Symposium on Virtual
Environments, Human-Computer Interfaces and Mea-
surement Systems (VECIMS2003), pages 184–189.
Austin, D. and McCarragher, B. (2001). Geometric con-
straint identification and mapping for mobile robots.
Robotics and Autonomous Systems, 35(2):59–76.
Burgard, W., Fox, D., Moors, M., Simmons, R., and Thrun,
S. (2000). Collaborative multi-robot exploration. In
Proceedings of the IEEE International Conference on
Robotics and Automation, pages 476–481.
Caglioti, V. (2001). An entropic criterion for minimum un-
certainty sensing in recognition and localization - part
i: Theoretical and conceptual aspects. IEEE Trans-
action on Systems, Man, and Cybernetics, 31(2):187–
196.
de Berg, M., Bose, P., Cheong, O., and Morin, P. (2004).
On simplifying dot maps. Computational Geometry,
27(1):43–62.
Dissanayake, G., Newman, P., Clark, S., Durrant-Whyte,
H., and Csorba, M. (2001). A solution to the simul-
taneous localization and map building (SLAM) prob-
lem. IEEE Transaction on Robotics and Automation,
17(3):229–241.
Dobkin, D. P. and Tal, A. (2001). Efficient and small rep-
resentation of line arrangements with applications. In
Proceedings of the Symposium on Computational Ge-
ometry, pages 293–301.
Gonz
´
ales-Ba
˜
nos, H. H. and Latombe, J. C. (2002). Nav-
igation strategies for exploring indoor environments.
International Journal of Robotics Research, 21(10-
11):829–848.
Gonz
´
ales-Ba
˜
nos, H. H., Mao, E., Latombe, J. C., Murali,
T. M., and Efrat, A. (2000). Planning robot mo-
tion strategies for efficient model construction. In
Hollerbach, J. and Koditschek, D., editors, Robotics
Research - The 9th Int. Symposium, pages 345–352.
Springer.
Kwon, Y. D. and S.Lee, J. (1999). A stochastic map build-
ing method for mobile robot using 2-d laser range
finder. Autonomous Robots, 7(2):187–200.
Lu, F. and Milios, E. (1997). Robot pose estimation
in unknown environments by matching 2D range
scans. Journal of Intelligent and Robotic Systems,
18(3):249–275.
Shore, J. E. (1984). On a relation between maximum like-
lihood classification and minimum relative entropy
classification. IEEE Transactions on Information The-
ory, 30(6):851–854.
Sim, R. and Dudek, G. (2003). Effective exploration strate-
gies for the construction of visual maps. In Proceed-
ings of the IEEE/RSJ International Conference on In-
telligent Robots and Systems, pages 3224–3231.
Tarantola, A. (1986). Inverse Problem Theory. Elsevier,
Amsterdam, The Netherlands.
Thrun, S. (2001). A probabilistic online mapping algorithm
for teams of mobile robots. International Journal of
Robotics Research, 20(5):335–363.
Thrun, S. (2002). Robotic mapping: A survey. In Exploring
Artificial Intelligence in the New Millenium, chapter 1.
Morgan Kaufmann.
Thrun, S., Burgard, W., and Fox, D. (1998). A probabilistic
approach to concurrent mapping and localization for
mobile robots. Machine Learning and Autonomous
Robots (joint issue), 31(5):1–25.
Thrun, S., Burgard, W., and Fox, D. (2000). A real-time
algorithm for mobile robot mapping with applications
to multi-robot and 3D mapping. In Proceedings of
the IEEE International Conference on Robotics and
Automation, pages 321–328.
ICINCO 2004 - ROBOTICS AND AUTOMATION
78
