
A CONCEPT LEARNING BASED APPROACH TO MOTION
CONTROL FOR HUMANOID ROBOTS
Kiyotake Kuwayama, Shohei Kato and Hidenori Itoh
Dept. of Intelligence and Computer Science, Nagoya Institute of Technology
Gokiso-cho, Showa-ku, Nagoya 466-8555, Japan
Keywords:
Humanoid robot, learning-based motion control, concept learning.
Abstract:
This paper proposes a concept learning-based approach to motion control for humanoid robots. In this ap-
proach, the motion control system is implemented with
decision tree learner
for the acquisition of balancing
property of itself body and movement and
depth first search technique
for the motion control based on the
knowledge concerning balance and stability in the motion. Some performance results by humanoid robot
HOAP-1 is reported: stable and anti-tumble motions to stand up from a chair. This paper also reports some
performance for the change in the environments; stand up from a chair on slope and different in height.
1 INTRODUCTION
Recently, the research of humanoid has been attract-
ing much attention in robotics. The latest research and
development brings several humanoid biped robots
in our lives (e.g., (Murase et al., 2001), (Kuroki
et al., 2002)). Sophisticated motion control tech-
niques for symmetric and cyclic motion, such as two-
legged locomotion (Taga, 1995), and asymmetric var-
ious movement of entire body, such as dance and
body exercise (Noritake et al., 2003), have been per-
formed by the humanoid robots. For these technolo-
gies, some learning-based approaches, such as rein-
forcement learning, neural network and so on, have
made a substantial contribution to motion control for
humanoids (e.g., (Morimoto and Doya, 2000), (Capi
et al., 2002) ). Reinforcement learning and neural
network approaches are, however, highly vulnerable
to a small change in the environments. The change
imposes re-learning, thereby making the motion con-
trol computationally very expensive. The advantage
of humanoids should be a diversity of motion because
of their link structure with high degree of freedom.
In this paper, we, thus, propose a concept learning
based motion generation system. The aim of this ap-
proach is to discover the knowledge for generating the
stable motion in balance. The system can generate a
stable and anti-tumble motion by the concept learn-
ing and the searching in the motion space: extract-
ing some generalized motion guideposts by decision
tree learner and motion generation with tracking the
guidepost by depth-first search. The system attempt
Training
1 . Making training motions
2 . Executing training motions
3 . Making training data sets
training
data set
Learning
1 . Building decition trees
2 . Extracting guideposts
Generating
guideposts
attributes (posture, sensor value
and success or failure)
training motion
1 . motion generation
by depth first search
Figure 1: The outline of the system.
to reduce the limitation of a motion variation and ex-
ecutive environment.
2 THE LINK MODEL AND THE
MOTION STABILITY VALUES
Preliminary to the description of our system, we give
a link model of our humanoid robot and its motion
stability values.
A posture of a humanoid robot is uniquely decided
from joint angles and body gradient. At arbitrary time
t, posture of humanoid robot is uniquely determined
by its joint angles and its body gradient. A time series
of postures becomes a motion of the humanoid.
Motion stability value
s are criteria of motion stabil-
ity. These value are position data concerning state of
the balance, such as center of mass (COM) and zero
moment point (Vukobratovic et al., 1970) (ZM P ), or
sensor value, such as body accelerate sensor.
335
Kuwayama K., Kato S. and Itoh H. (2004).
A CONCEPT LEARNING BASED APPROACH TO MOTION CONTROL FOR HUMANOID ROBOTS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 335-338
DOI: 10.5220/0001142903350338
Copyright
c
SciTePress
motion 1 :
motion :
. . .
. . .
Learning with C4.5
.
.
.
.
.
.
.
.
.
TIME :
. . .
Learning with C4.5
.
.
.
. . .
. . .
: an extracted guidepost
TIME :
COM ZMP
...
motion1
motion
.
.
.
0.039
0.026
0.045
2.302
TIME :
...
...
Result
success
failure
.
.
.
.
.
.
.
.
.
.
.
.
COM ZMP
...
motion1
motion
.
.
.
0.030
0.016
0.178
1.371
...
...
Result
success
failure
.
.
.
.
.
.
.
.
.
.
.
.
Figure 2: Training data sets for learning.
3 A CONCEPT
LEARNING-BASED MOTION
GENERATION SYSTEM
The section describes our motion generation system
for humanoid robots. This system can generate a
stable and anti-tumble motion which transforms the
robot from an initial posture into a target posture. Fig-
ure 1 shows the outline of the system. The system has
three parts:
Training
,
Learning
and
Generating
part.
Each part of the system is described below.
Training Part
Firstly, the system makes training data sets for learn-
ing part.
1. Preliminary to motion generation, lots of motions,
by which the robot moves between the initial and
the target posture, are made. These motions are
independent of feasibility consideration.
2. The robot, then, executes the motions. The motions
are, after that, classified into two groups:
positive
or
negative
examples, according to the feasibility
of the motions.
3. Each example has some attributes as the reason for
the classification.
Motion Stability Values
are con-
sidered as the attributes.
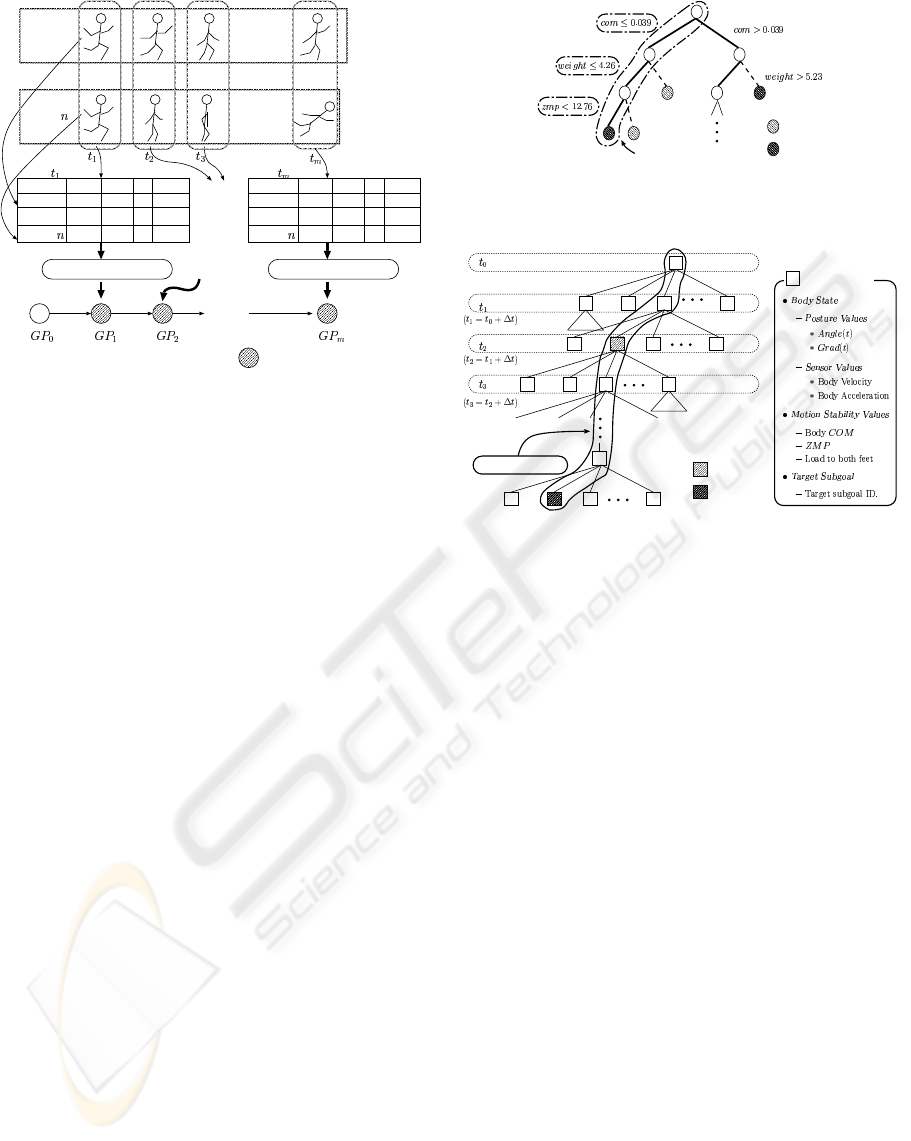
Motion and sensor values are time-series data. In this
paper, the training data set is decomposed by time (see
Figure 2).
Learning Part
Secondly, the system extracts some guideposts for
stable and anti-tumble motion from training data sets
by a concept learning system C4.5 (Quinlan, 1993).
1. The system builds a decision tree from a training
data set by C4.5, which is generally considered to
: Failure
: Success
85%
15%
the highest accuracy
Figure 3: A model of decision tree by concept learning.
Initioal Posture
: subgoal
: final goal
Time
a generated motion
data structure
Figure 4: A model of search tree by our system.
be one of the best empirical decision tree learners.
It should be noticed that decision trees are built at
arbitrary time intervals.
2. The highest accuracy path from a root node to a
successful leaf is extracted as a guidepost from
each of the decision trees. One guidepost has some
conditions of the
Motion Stability Value
s for the
robot so as to execute the motion stably (see Fig-
ure 3).
Through the above procedure, guideposts are com-
posed in a time-series. A robot motion is generated by
successively tracking the guideposts as subgoal from
initial posture.
Generating Part
The system, finally, generates a motion by search in
the motion space.
1. Depth first search generates sequences of joint an-
gles to transform the robot into the target posture.
In general for humanoid robots, the search space for
motion generation exponentially explodes because of
the large numbers of DOFs. In our system, search
space is reduced by tracking the guideposts. The
search tree generated by our system is intuitively il-
lustrated in Figure 4. A node of the search tree has
the data structure written on the right side of the fig-
ure. A
subgoal
means an intermediate guidepost for
target posture.
ICINCO 2004 - ROBOTICS AND AUTOMATION
336

Figure 5: HOAP-1.
centor of mass
Figure 6: The link
structure for stand-
ing motion.
Table 1: Learning Results
GP
1
COM
x
> −0.035 GP
3
COM
z
> 0.215
COM
x
<= −0.026 GP
4
COM
z
> 0.215
GP
2
COM
x
> −0.056 GP
5
COM
z
> 0.233
COM
x
<= 0.018 GP
F
COM
x
= 0.008
COM
z
> 0.197 COM
z
= 0.237
4 EXPERIMENT
The section gives a performance of our system. The
target motion is to stand up from a chair.
4.1 Humanoid Robot
In this paper, we consider the motion control of a hu-
manoid robot, HOAP-1 (Humanoid for Open Archi-
tecture Platform) produced by Fujitsu(Murase et al.,
2001), shown in Figure 5. The total weight is 5.8 (kg)
and the height is 480 (mm). HOAP-1 has 20 DOFs in
total, 6 in each leg and 4 in each arm.
4.2 Standing Motion from a Chair
In this paper, we suppose that standing motion from
a chair is made by changing the servo motor of coxa,
guidepost ID 0 1 1 1
time (msec) 0 500 1000 1250
guidepost ID 1 5 FINAL
time (msec) 2000 3000 3250
Figure 7: The snapshot of a standing motion generated by
the system.
0.17
0.18
0.19
0.2
0.21
0.22
0.23
0.24
-0.08 -0.06 -0.04 -0.02 0 0.02 0.04
Figure 8: Trajectory of COM changing the height of a
chair.
knee and ankle joint. The motion is supposed to be
symmetric. The link structure is, thus, simplified to
three links model shown in Figure 6. A training mo-
tion is made by the linear interpolation at twice be-
tween a sitting posture and a middle posture and be-
tween a middle posture and a standing posture for
2000 (msec). The height of the chair on a flat floor
is set 120 (mm). We have prepared 477 motions by
changing the middle posture. HOAP-1 has executed
these motions in advance to the motion generation,
and then the motions are classified into two groups:
success or failure. Horizontal and vertical compo-
nents of COM are given as the attributes of the mo-
tions. We have made 5 training data sets of 477 ex-
amples, and built 5 decision trees and 5 guideposts by
C4.5. Table 1 shows the guideposts for standing from
the chair. HOAP-1 stood up from a 120(mm) tall chair
on a flat floor by tracking these guideposts.
We have made some experiments that the some
changes in the environment are imposed on the mo-
tion generation. In these experiments, it should be
noticed that each of the guideposts is the same with
the guidepost extracted from the above learning(see
Table 1); there is no re-learning, that is, these experi-
ments is to verify the admissibility of our system for
the changes in the environment. The results may indi-
cate how learned knowledge is generalized, and how
search control recovers the mistracking of guideposts.
Stand up from a Chair in Different Height
We have made some experiments for the stand up mo-
tion by changing the height of a chair. For a 100 (mm)
(i.e., lower than that for learning) tall chair, GP
1
and
GP
3·4
were most effective for the motion generation.
For a 140 (mm) (i.e., higher than that for learning)
tall chair, GP
1
and GP
2
were most effective. Fig-
ure 8 shows the trajectory of COM of HOAP-1 when
it executes the motions obtained by search.
Stand up from a Chair on a Slope
We have made some experiments for the stand up mo-
tion from a chair on forward and backward slopes. In
A CONCEPT LEARNING BASED APPROACH TO MOTION CONTROL FOR HUMANOID ROBOTS
337
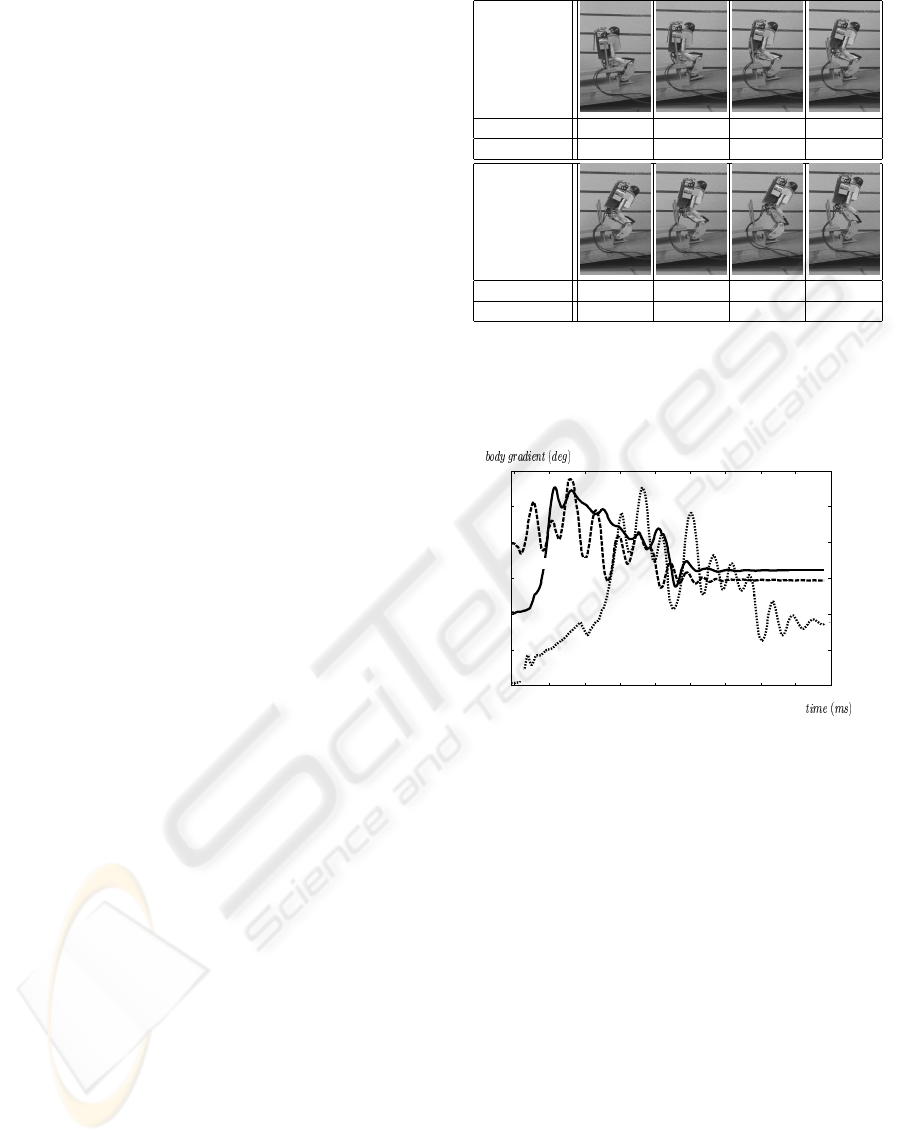
this particular case, the system can generate the stand
up motion with only GP
5
. Figure 9 shows the snap-
shots of a standing motion by our system, where the
gradient of ground is 10.0 (deg) backward. In this
particular case, the system can generate the stand up
motion with only GP
1
and GP
3·4
. Figure 10 shows
the trajectory of the gradient of HOAP-1 body when
it executes the motions obtained by search. In the fig-
ure, solid, dashed and dotted lines show the trajectory
of the gradient of HOAP-1’s body standing up from
chair on the flat, the forward slope and the backward
slope, respectively. The two broken lines, at the be-
ginning of the motion, show that the gradients of the
body on the slopes are both different from that on the
flat. The difference corresponds to the gradient of the
slope. This is obvious, for HOAP-1 is sitting on a
chair on the slope. Through the movement, the differ-
ence of the gradient is attenuated gradually. The re-
sults indicates that the motion control adapts the mo-
tion to the different environments.
5 CONCLUSION
This paper proposed a concept learning-based ap-
proach to motion control for humanoid robots. The
motion generation system had been implemented with
decision tree learner C4.5 and depth first search tech-
nique. Some stable and anti-tumble motions to stand
up from a chair were performed by humanoid robot
HOAP-1. In future work, we will dedicate to the im-
provement of our system for more complex motions
and to the investigation of the relations of the suitable
number between guideposts and examples for learn-
ing.
REFERENCES
Capi, G., Nasu, Y., and Barolli, L. (2002). A new gait op-
timization approach based on genetic algorithm for
walking biped robots and a neural networks imple-
mentation. Journal of IPSJ, 43(4):1039–1049.
Kuroki, Y., Ishida, T., Nagasaka, K., and Yamaguchi, J.
(2002). A small biped walking entertainment robot
sdr-4x with a highly integrated motion control. In
Proc. of the 20-th conf. of Robotics Society of Japan,
page 1C34. (in Japanese).
Morimoto, J. and Doya, K. (2000). Acquisition of stand-up
behavior by a real robot using hierarchical reinforce-
ment learning. In Proc. of International Conference
on Machine Learning, pages 623–630.
Murase, Y., Yasukawa, Y., Sakai, K., and et al. (2001).
Design of a compact humanoid robot as a plat-
form. In Proc. of the 19-th conf. of Robotics
guidepost ID 0 1 1 1
time (msec) 0 1000 2000 3000
guidepost ID 5 5 5 FINAL
time (msec) 3500 4250 5000 6250
Figure 9: The snapshot of a standing motion generated by
the system, where the ground has gradient of 10.0 (deg)
backward.
-10
-5
0
5
10
15
20
0 1000 2000 3000 4000 5000 6000 7000 8000 9000
flat
10.0 (deg) forward
10.0 (deg) backward
Figure 10: Trajectory of gradient of the body changing gra-
dient of the ground.
Society of Japan, pages 789–790. (in Japanese),
http://pr.fujitsu.com/en/news/2001/09/10.html.
Noritake, K., Kato, S., Yamakita, T., and Itoh, H. (2003).
A motion generation system for humanoid robots – tai
chi motion –. In Proc. of International Symposium on
Micromechatoronics and Human Science, pages 265–
269.
Quinlan, J. R. (1993). C4.5: Programs for Machine Learn-
ing. Morgan Kauffman.
Taga, G. (1995). A model of the nueo-musculo-skeletal sys-
tem for human locomotion, i. emergence of basic gait.
Biological Cybernetics, 73:97–111.
Vukobratovic, M., Frank, A. A., and Juricic, D. (1970).
On the stability of biped locomotion. IEEE Trans. on
Biomedical Engineering, 17(1):25–36.
ICINCO 2004 - ROBOTICS AND AUTOMATION
338
