
CONSTRUCTION OF THE VORONOI DIAGRAM BY A TEAM
OF COOPERATIVE ROBOTS
Flavio S. Mendes, Júlio S. Aude, Paulo C. V. Pinto
IM and NCE, Federal University of Rio de Janeiro
P.O.Box 2324 - Rio de Janeiro - RJ 20001-970 - Brazil
Eliana P.L. Aude
NCE, Federal University of Rio de Janeiro
P.O.Box 2324 - Rio de Janeiro - RJ 20001-970 – Brazil
Keywords: Voronoi diagram, path planning, cooperative robots, parallel algorithm, message passing
Abstract: This paper presents a method for cooperation in the construction of Voronoi diagrams which is suitable for
use in dangerous tasks performed by a team of robots. The algorithm has been implemented on a network of
eight workstations using the MPI library. Two implementation approaches have been used. In the first one,
no communication among the robots is required but some degree of redundancy in the work performed by
the robots may result. In the second approach, a more cooperative scheme is adopted and, as a consequence,
communication among the robots increases but the work performed by each one is reduced. In both
approaches, the calculation time decreases almost linearly when adding robots to the team. Nevertheless, the
second approach, more cooperative, has consistently produced better results. With the achieved speed-up, it
is possible to use this algorithm in applications where the obstacle configuration within the robot team
working area changes with time.
1 INTRODUCTION
This paper presents a message-passing cooperative
algorithm for the construction of Voronoi diagrams
which is suitable for use within a team of
cooperative robots. The algorithm implementation
allows the required storage to be evenly distributed
among the robots and demands little or no
communication at all among the robots. However, in
this latter case, the robots may end up doing some
redundant work.
Different approaches, such as visibility graphs
(Pere, 1979), potential fields (Kim, 1991) (Aude,
1999) and Voronoi diagrams (Lato, 1996), can be
used in the solution of the path-planning problem.
This paper is focused on a cooperative
implementation of the Voronoi diagram by a robot
team.
More recently, parallel algorithms for the
construction of Voronoi diagrams have also been
presented (Tzio, 1997) (Sudh, 1999). Both
algorithms have been conceived for implementation
on dedicated VLSI cellular architectures which are
based on fine grain parallelism and tight coupling
between neighbor cells consisting of very simple
hardware. Therefore, these algorithms are not
suitable for use in distributed environments such as a
team of cooperative robots.
The algorithm works for arbitrarily shaped
robots, as long as the distance from the robot center
to its most external point is known, and assumes that
the arrangement of obstacles within the working area
is known a priori. However, since the algorithm
scales very well with the number of robots, it can be
used to compute new Voronoi diagrams very fast
whenever the configuration of obstacles change.
Therefore, the proposed algorithm can be very
useful in applications where teams of cooperative
robots work in time-varying environments requiring
path re-planning due to changes in the obstacle
configuration.
307
S. Mendes F., S. Aude J., C. V. Pinto P. and P. L. Aude E. (2004).
CONSTRUCTION OF THE VORONOI DIAGRAM BY A TEAM OF COOPERATIVE ROBOTS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 307-311
DOI: 10.5220/0001144303070311
Copyright
c
SciTePress

Section 2 of this paper describes the basic
sequential algorithm used to construct the Voronoi
diagrams and its required data structures. Section 3
discusses two different approaches for the
cooperative implementation of this algorithm. In
Section 4, performance results are presented
considering implementations of the algorithm on an
Ethernet cluster of workstations and the use of MPI
(Message Passing Interface). Finally, in Section 5,
the main conclusions of the paper are summarized
and the proposals for future work are presented.
2 BASIC ALGORITHM
The proposed algorithm works on a grid of square
cells that represents the plane working area of the
robots. The obstacles which are present in this area
are known a priori and a separate data structure
holds the coordinates of the obstacle corners and the
equations of the obstacle edges. In the two-
dimensional plane, the obstacles must be represented
as a single convex figure or as a set of convex
figures, including circles. Any non-convex figure
must initially be broken into two or more convex
figures before the algorithm starts its operation.
Circular objects are described by the center
coordinates and the value of the radius.
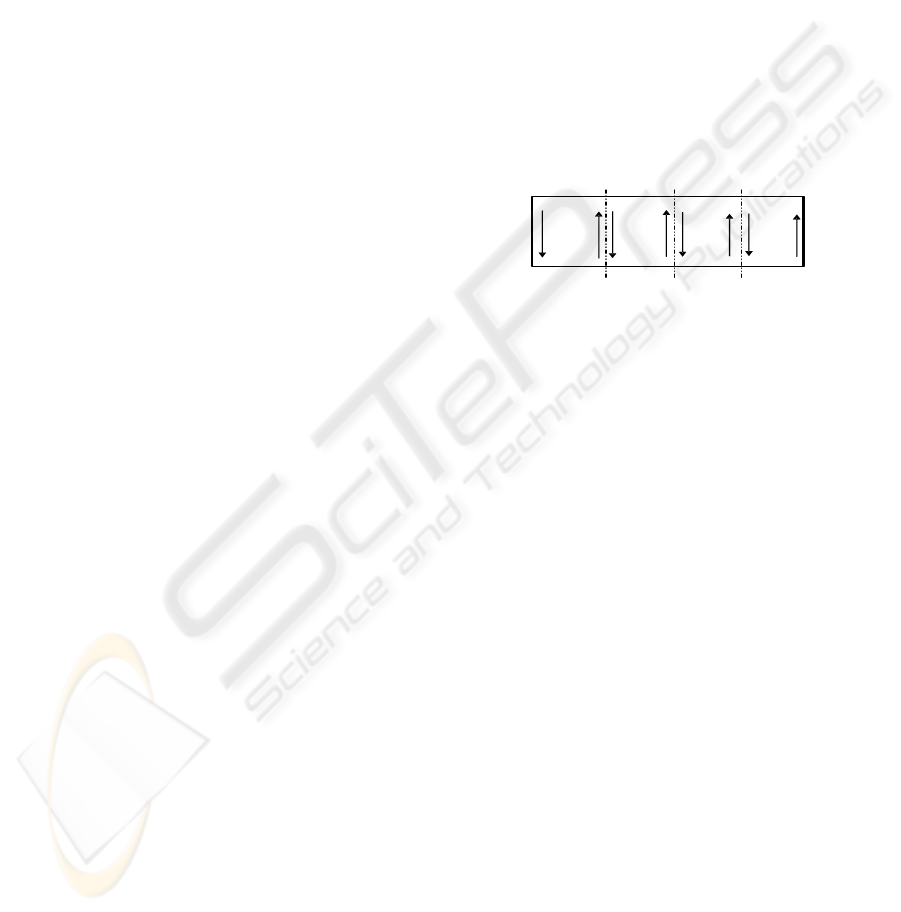
Figure 1: Next Cell Choices
The grid data structure holds status information
for each cell and the closest obstacle identification
for every corner of a grid cell. In a typical
implementation, both the cell status and the obstacle
identification can be stored in a single byte. Since
for a grid consisting of N x N cells there are (N+1)
2
corners, the number of bytes needed to store the
information associated with grid cells status and
corner information is given by: N
2
+ (N+1)
2
, which
is close to 2N
2
for large values of N, thus giving
O(N
2
). Therefore, for a 1000 x 1000 grid the
required amount of storage is around 2 Mbytes.
The proposed algorithm is based on three very
simple ideas. The first one is that all the vertices of
the working area bounding polygon are Voronoi
vertices. The second one derives from the
observation that the Voronoi diagram is always a
connected diagram, in which the Voronoi arcs
always have at least one intersection point. And the
third is that if at least 2 cell corners are closer to
different obstacles then the cell belongs to the
Voronoi Diagram. Therefore, given a starting point
for the diagram, it is possible to draw it on a grid by
checking at each step which is the next neighboring
cells to be visited. Such cells will be the ones whose
common edge with the current cell connects two
corners labeled with different obstacles and is not
the cell entrance edge. This procedure is shown
when a Voronoi vertex is reached on Figure 1.
Based on these three ideas the algorithm finds
the Voronoi diagram (VD) using the following
procedure:
begin
create a queue to temporarily hold the
Voronoi cells;
mark all the cells inside the working
area as free and all the cells
external and around the working area
as blocked;
choose one of the working area bounding
polygon vertices as the VD starting
point;
mark the corresponding cell as belonging
to the VD;
insert the starting point in the queue;
while the queue is not empty do
remove a cell from the queue;
mark it as belonging to the VD;
for each edge whose corner labels are
different
if it’s not the entrance edge and
not belonging to the diagram then
insert this neighbor cell in the
queue and fill in its corner's
label;
end if;
end for;
end while;
end;
The algorithm starts by choosing one of the
working area bounding polygon vertices as the
Voronoi diagram starting point and inserts it in the
temporary queue. Then, while this queue is not
empty, the algorithm removes cells from the queue
and marks them as belonging to the diagram. For
each cell marked, the next cell choice procedure is
used to determine which cells will be put in the
queue. All cells selected in the previous procedure
have their four corners labeled with the Euclidean
distance to the closest obstacle. Finally, the selected
cells are entered into the queue. The procedure is
repeated until no more cells can be found in the
queue. At this point the Voronoi diagram is
completely determined.
The amount of computation required for finding
the closest obstacle to a particular cell corner is
reduced if the algorithm computes only the distances
to obstacle edges which are “visible” from that
Next
Possible
Position
Next
Possible
Position
Last
Position
Present
Position
A
A B
C
ICINCO 2004 - ROBOTICS AND AUTOMATION
308
corner. A limited but effective visibility test of an
obstacle edge can be performed by finding the inner
product between a perpendicular outward vector to
the obstacle edge and a vector which starts at the cell
corner under consideration and points to any point
inside the obstacle polygon or on its edges. If the
inner product is negative, the edge is visible,
otherwise it is invisible and no distance calculations
need to be performed.
The procedure implemented by the described
algorithm would be sufficient to find the Voronoi
diagram for solving the path planning problem for
robots which are reduced to a point. In order to make
the algorithm work for arbitrarily shaped robots, a
slight modification has to be introduced. Let us
consider that the distance from the robot center to its
most external point is r. Then, when the algorithm
finds a cell which should belong to the Voronoi
diagram, it must perform a proximity test to verify if
the distances from all the cell corners to the closest
obstacles are greater than r. If this is true then the
cell is marked as belonging to the Voronoi diagram
and inserted in the queue. Otherwise the cell is
marked as blocked but it is still inserted in the
queue, because its neighbors may still belong to the
Voronoi diagram which will establish possible paths.
The algorithm error in defining the Voronoi
diagram is less than the size of a cell diagonal. If, for
instance, the robot working area is a 10m x 10m
square and the grid structure is defined as a 1000 x
1000 cell array, the maximum algorithm error is less
than 1.41 cm since the cell side is 1 cm long.
3 COOPERATIVE STRATEGY
The proposed cooperative implementation of the
algorithm described in Section 2 divides the working
area of the robots into Nr slices, where Nr is the
number of available robots. Each robot has a
working area slice associated with it and is
responsible for finding the Voronoi diagram within
that slice. Therefore, only a fraction (1/Nr) of the
grid data structure needs to be stored by each robot.
The data structure containing information on the
obstacle corner coordinates and on the equations of
the obstacle edges is broadcast to all the robots. Two
approaches have been adopted to solve this problem.
The first one does not require any communication,
but leads to some redundant work performed among
the robots. In the second approach, some
communication between the robots working on
neighbor slices is required but, as a consequence, a
more cooperative work pattern is adopted.
If we assume the working area is rectangular and
the cut lines are vertical lines, it is possible to say
that the Voronoi diagram will certainly cross the
vertical borders of a slice. So, in the first approach,
every robot searches both vertical border lines of its
assigned slice for grid cells representing Voronoi
points, as shown in Figure 2, where the use of four
processors (P0 to P3) is considered.
Once a Voronoi point is found, the Voronoi
diagram segment starting at the corresponding cell
and within robot slice is determined using the
algorithm described in Section 2. This procedure is
repeated until all the cells on both vertical border
lines have been visited. The two robots with the
leftmost and the rightmost slices assigned to them
can do less work because they know a priori the
working area corners are Voronoi vertices and,
therefore, they can draw the Voronoi diagram
segments starting from these two known points. So,
each vertical border line is analyzed twice by two
different robots as can be seen in Figure 2.
Figure 2: Working Area Partition
In the second approach, this redundant work is
avoided by assigning, for instance, the job of
searching a vertical border line to the robot which is
responsible for defining the Voronoi diagram within
the border right slice. The cell coordinates
corresponding to Voronoi points which have been
found on the border line are sent to the robot
processing the neighbor slice on the left. When the
coordinates of a cell are received, the robot puts the
cell on its queue. This cell will be used as the
starting point for finding a Voronoi diagram
segment. With this second approach, each robot
searches for Voronoi points on a single vertical
border line and receives the information on Voronoi
points on the other border line from its right side
neighbor. Therefore, each robot does less work and
uses communication to help its left side neighbor to
do its work.
4 EXPERIMENTAL RESULTS
The parallel algorithm described in Section 2 has
been implemented in C with the use of MPI
(Message Passing Interface) for implementing the
communication functions on an Ethernet cluster
consisting of 6 workstations, with 2.4 GHz Intel
Pentium 4 processors and 128 Mbytes of memory.
This environment has been chosen for the
experiments because it is similar to the actual
P0
P1 P2
P3
CONSTRUCTION OF THE VORONOI DIAGRAM BY A TEAM OF COOPERATIVE ROBOTS
309
environment in which the cooperative robots use
Ethernet-like wireless communication.
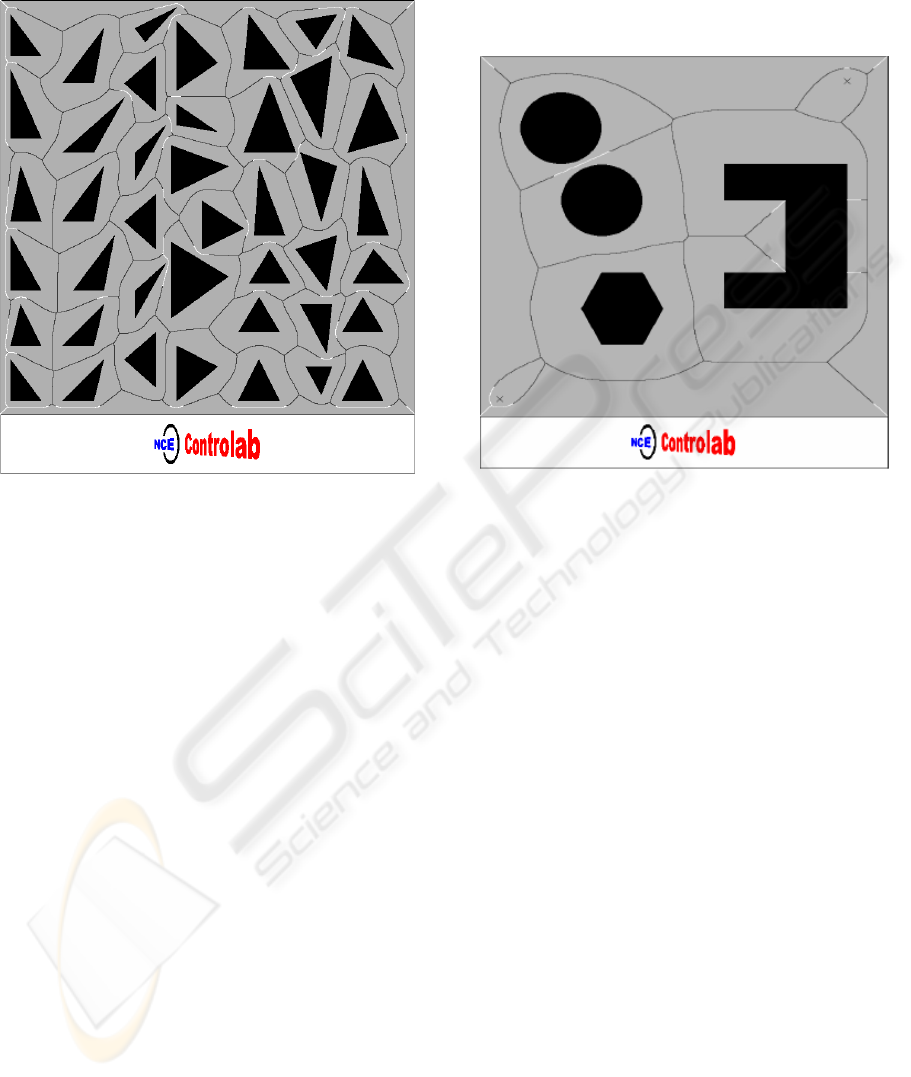
Figure 3: Voronoi Diagram – Sea of Triangles
Two obstacle arrangements have been
considered in the experimental work. In the first one,
a sea of triangles is placed within the working area.
Figure 3 shows the resulting Voronoi diagram
produced for this arrangement by the proposed
algorithm. The lighter lines represent Voronoi
diagram segments which have failed the proximity
test.
In the second example, less obstacles are present
but they have different types of shapes, including
circles, dots and non-convex polygons. Figure 4
shows the resulting Voronoi diagram for this
obstacle arrangement (mixed shapes).
For both obstacle arrangements shown in Figures
3 and 4, the application of the visibility test has been
able to reduce by nearly 40% the amount of
computational work performed by the algorithm.
For each example situation, three grid sizes have
been considered in the experiments: a small (1024 x
1024), a medium (2048 x 2048) and a large (4096 x
4096) one. For all combinations of obstacle
arrangements and grid sizes, both approaches for the
algorithm parallel implementation described in
Section 3 have been evaluated considering the use of
1, 2, 4 or 6 workstations in the network.
As a higher grid resolution is used, more work
has to be done by the processors in both approaches
(particularly in the no communication approach)
since the number of cells per slice border increases
and the number of Voronoi points in the diagram
also increases. However, the amount of work grows
linearly with the grid dimension. Therefore, the
algorithm performance can scale very well.
Figure 4: Voronoi Diagram - Mixed Shapes
It should also be noticed that the computational
work associated with the determination of Euclidean
distances between each candidate Voronoi point and
the visible edges is greater when the sea of triangles
arrangement is considered since the number of
obstacles is higher. This issue is important because,
with the no communication approach, the number of
Euclidean distances that are calculated is
approximately twice as big as the number of
distances evaluated by the cooperative approach. So,
when the amount of calculation is reduced, the no
communication approach was able to produce
smaller running times than the cooperative approach
in two situations in which only two processors were
in use, the grid size was not the largest one and the
mixed shape obstacle arrangement was considered.
Figures 5 and 6 show the speed up achieved by
the parallel algorithm based on both approaches.
The figures show that, in most cases, the
cooperative approach achieved a slightly higher
speed-up. Nevertheless, for both approaches the
speed up increases almost linearly with the number
of processors when the sea of triangles obstacle
arrangement is used. With this arrangement more
computational work is available to be done and, as a
consequence, better load balancing among a larger
number of processors can be achieved.
ICINCO 2004 - ROBOTICS AND AUTOMATION
310
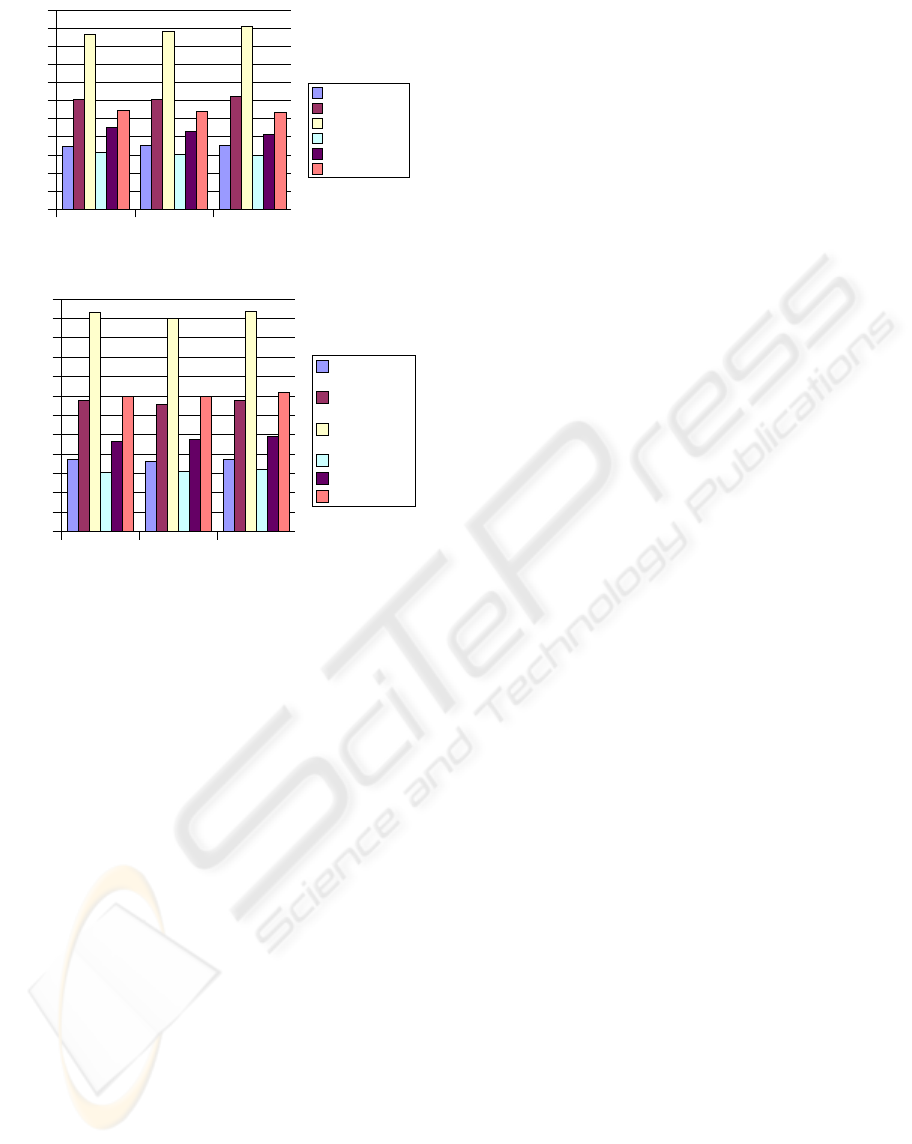
Figure 5: Speed-up - No Communication Approach
Figure 6: Speed-up - Cooperative Approach
5 CONCLUSIONS AND FUTURE
WORK
Two approaches for the cooperative implementation
of an algorithm for the construction of Voronoi
diagrams which is suitable for use within a team of
cooperative robots have been discussed in this paper.
The first one does not require any communication
among the robots. However, with this approach
some redundant work is performed by the robots.
The second approach requires some communication
among the robots but implements a more
cooperative strategy for the construction of the
Voronoi diagram.
Experiments performed on an Ethernet cluster of
workstations have demonstrated that both
approaches for the algorithm cooperative
implementation scale well with the number of
processors particularly when the number of
obstacles is big. Nevertheless, the approach based on
cooperation has produced slightly better results for
two quite different obstacle arrangements and for
different grid resolutions. With the achieved speed-
ups and running times, the parallel algorithm can be
used in applications where the obstacle
configuration changes with time within the robot
team working area and, consequently, real time path
re-planning is often needed.
Future work will include the actual
implementation and evaluation of the proposed
parallel algorithm within a team of cooperative
mobile robots under development in our laboratory
(Lopes, 2001) (Aude, 2003).
ACKNOWLEDGEMENTS
The authors would like to thank CNPq and FINEP
for the support given to the research work.
REFERENCES
E.P.L. Aude, et al., "CONTROLAB MUFA: A Multi-
Level Fusion Architecture for Intelligent Navigation
of a Telerobot", Proc. 1999 IEEE Int'l Conf. on
Robotics and Automation, Detroit, USA, May 1999,
V. 1, pp. 465-472
E.P.L. Aude, et al., “Real-Time Obstacle Avoidance
performed by an Autonomous Vehicle throughout a
Smoot Trajectory using an Electronic Stick”, Proc.
1999 IEEE Int'l Conf. on Robotics and Automation,
Las Vegas, USA, Oct 2003
J. Kim, P. Khosla, “Real-Time Obstacle Avoidance using
Harmonic Potential Functions”, Proc. of the IEEE Int'l
Conf. on Robotics and Automation, Sacramento, USA,
April, 1991, pp. 790-796
J.C. Latombe, “Robot Motion Planning”, Kluwer
Academic Publishers, USA, 1996
E.P. Lopes, et al., “Application of a Blind Person Strategy
for Obstacle Avoidance with the use of Potential
Fields”, Proc. 2001 IEEE Int'l Conf. on Robotics and
Automation, Seoul, Korea, May 2001
T. L. Pérez, W. R. Michael, “An Algorithm for Planning
Collision-Free Paths among Polyhedral Obstacles”,
Comm. of the ACM, V. 22, N. 10, Oct.1979, pp. 560-
570
N. Sudha, S. Nandi, K. Sridharan, “A Parallel Algorithm
to Construct Voronoi Diagram and its VLSI
Architecture”, Proc. of the 1999 IEEE Int'l Conf. on
Robotics and Automation, Detroit, USA, May , 1999,
pp. 1683-1688
P. G. Tzionas, , “Collision-Free Path Planning for a
Diamond-Shaped Robot Using Two-Dimensional
Cellular Automata”, IEEE Trans. on Robotics and
Automation, V. 13, N. 2, April 1997, pp. 237-250
1024 2048 4096
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
2 proc – tri-
angles
4 proc – tri-
angles
6 proc – tri-
angles
2 proc – mixed
4 proc – mixed
6 proc – mixed
Grid Size
Speed-Up
1024 2048 4096
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
2 proc – triangles
4 proc – triangles
6 proc – triangles
2 proc – mixed
4 proc – mixed
6 proc – mixed
Grid Size
Speed-Up
CONSTRUCTION OF THE VORONOI DIAGRAM BY A TEAM OF COOPERATIVE ROBOTS
311
