
DYNAMIC ROUTING AND QUEUE MANAGEMENT
VIA BUNDLE SUBGRADIENT METHODS
Almir Mutapcic, Majid Emami and Keyvan Mohajer
Information Systems Laboratory
Stanford University, Stanford, CA 94305
Keywords:
Dynamic network routing, queue management, dual methods, bundle subgradient methods.
Abstract:
In this paper we propose a purely distributed dynamic network routing algorithm that simultaneously regulates
queue sizes across the network. The algorithm is distributed since each node decides on its outgoing link
flows based only on its own and its immediate neighbors’ information. Therefore, this routing method will
be adaptive and robust to changes in the network topology, such as the node or link failures. This algorithm
is based on the idea of bundle subgradient methods, which accelerate convergence when applied to regular
non-differentiable optimization problems. In the optimal network flow framework, we show that queues can
be treated as subgradient accumulations and thus bundle subgradient methods also drive average queue sizes
to zero. We prove the convergence of our proposed algorithm and we state stability conditions for constant
step size update rules. The algorithm is implemented using Matlab and its performance is analyzed on a test
network with varying data traffic patterns.
1 INTRODUCTION
This paper investigates joint dynamic routing and
queue management in data networks. In networking
literature, queue management is often referred to as
congestion control, since congestion in networks oc-
curs when current link capacities cannot satisfy the
user’s needs, and we have to delay the user’s data
packets by storing them in queues. Network perfor-
mance and its Quality of Service (QoS) are measured
by metrics such as routing delay, maximum link uti-
lization, convergence time after failures, etc.
Many current routing algorithms used in practice
are based on heuristics and are not optimal in any
sense. They are often static (fixed-time) algorithms;
they make flow decisions ahead of time and fix all
routing tables for future network use. For example,
most of routing protocols use hop-counts or some ar-
tificial weights assigned to the links in order to derive
routing tables for a given network.
We will investigate new routing strategies that are
dynamic in time, and that simultaneously optimize
queue lengths in the network. Dynamic routing algo-
rithms continuously change packet routes as the net-
work topology and users’ demands change; for a dy-
namic routing algorithm example see (Segall, 1977).
Routing methods can also be classified based on the
type of network coordination. We can have central-
ized, synchronously distributed, and asynchronously
distributed algorithms. We are interested in dis-
tributed algorithms since they do not require any cen-
tralized coordinator with a global network knowl-
edge, and they are more robust to adversarial changes
in network topology.
2 OPTIMAL ROUTING AND
QUEUE MANAGEMENT
2.1 Optimal routing
One way to improve routing through network is by us-
ing multiple paths between any pair of source and des-
tination nodes in the network. Current routing meth-
ods like the routing mechanism in the OSPF protocol
utilize this idea in a limited sense, i.e., the data pay-
load is divided among the shortest paths (if more than
one) toward the given destination. This is still not an
optimal solution; however, it is better than using a sin-
gle routing path.
12
Mutapcic A., Emami M. and Mohajer K. (2004).
DYNAMIC ROUTING AND QUEUE MANAGEMENT VIA BUNDLE SUBGRADIENT METHODS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 12-19
DOI: 10.5220/0001144800120019
Copyright
c
SciTePress

2.2 Queue management
The main goal of a queue management algorithm is
to maximize throughput and minimize queue delays
in a network. In this case it is highly desirable to have
a distributed queue management algorithm since it is
impossible to coordinate all source nodes in a large
network.
Our routing strategy will optimize average queue
sizes, and therefore implement a dynamic routing
strategy with active queue management.
2.3 Problem formulation
General joint dynamic routing and queue manage-
ment problems can be formulated as a convex opti-
mization problem constrained by a linear dynamical
system and feasibility constraints. This problem is an
instance of the optimal control problem, where our
objective (performance) function can be any convex
function. Using a discrete time queuing model, and
a single user traffic on a connected directed network
with n nodes and p links, we obtain the following
problem
minimize
P
t
f
t=t
i
h
P
p
j=1
φ
j
(x
j
(t))
+
P
n
i=1
ψ
i
(q
i
(t)) − U (s(t)) ]
subject to q(t + 1) = q(t) + s(t) − Ax(t),
−c ¹ x(t) ¹ c,
0 ¹ q(t) ¹ Q
max
,
S
min
¹ s(t) ¹ S
max
.
Problem variables are: traffic flows x(t) ∈ R
p
,
which can have negative components since we allow
reverse flow on the network links (i.e., the links are
bi-directional); queue lengths q(t) ∈ R
n
represent
amount of packets waiting to be processed at each
node’s queue; source rates s(t) ∈ R
n
is a vector of
incoming and removed network traffic at each node,
such that
P
n
i=1
s
i
(t) = 0. The flows are restricted
by the given link capacities c
j
> 0, the queues size
limit is Q
max
, and the source-sink rates can be varied
between S
min
and S
max
. The matrix A ∈ R
n×p
is the
node incidence matrix for the given directed graph.
The function φ
j
: R → R is the flow cost function
for link j, ψ
i
: R → R is the queue size penalty
function for node i, and U : R
n
→ R is the utility
measure function for a given source-sink rate vector
s.
Typically encountered flow cost functions are
φ
j
(x
j
(t)) =
|x
j
(t)|
c
j
− |x
j
(t)|
, (1)
φ(x(t)) = max
j
½
|x
j
(t)|
c
j
¾
where the domain of φ is dom φ
j
= (−c
j
, c
j
).
The first function gives the expected waiting time in
M/M/1 queue, while the second function gives the
maximum link utilization, see (Bertsekas and Gal-
lager, 1991).
Typical queue penalty functions ψ
i
are linear or
quadratic functions, where later one heavily penalizes
buildup of very large queues.
Utility functions U represent the user utility for dif-
ferent source-sink flows. They show willingness of
the user to pay for an additional amount of network
bandwidth.
An equivalent (relaxed) formulation of the general
problem will be considered in this paper. We will
assume that each customer (node) has an exact net-
work rate agreement, and therefore we can remove
utilization functions from our objective and eliminate
source rate constraints. We will choose the flow cost
functions φ
j
such that they act as barrier functions for
x
j
(t) feasibility. For example, the flow cost functions
from equation (1) can be defined to be finite inside of
their domain (−c, c) and infinite outside. Therefore,
if we start in the feasible flow region, we will always
stay feasible, and the link capacity constraints will
be automatically enforced. Final relaxation is that
we will not limit queue sizes, since we want to ob-
serve queues behavior especially when they become
unbounded. In practical systems, queues will be fi-
nite and they will start dropping packets when they
become over-saturated. Therefore, our final problem
formulation is
minimize
P
t
f
t=t
i
h
P
p
j=1
φ
j
(x
j
(t))
+
P
n
i=1
ψ
i
(q
i
(t)) ]
subject to q(t + 1) = q(t) + s(t) − Ax(t),
q(t) º 0.
(2)
Since we will only consider convex flow cost and
queue size penalty functions, this is a convex
optimization problem; convex optimization topics
are beautifully treated in (Boyd and Vandenberghe,
2003). Since we have a convex optimization prob-
lem, there exists a global optimal solution which we
will seek to find using a dynamical and distributed al-
gorithm.
3 DUAL METHODS
In order to gain some insight into problem (2) in dy-
namical settings, we will first investigate its solution
in a static case. We formulate the static-time optimal
network flow problem by setting all queues to zero
for all the time (basically removing queues from the
system) and thus only enforcing the flow conservation
DYNAMIC ROUTING AND QUEUE MANAGEMENT VIA BUNDLE SUBGRADIENT METHODS
13

constraint in the network.
minimize
P
p
j=1
φ
j
(x
j
)
subject to Ax = s.
The Lagrangian for this problem is
L(x, ν) =
p
X
j=1
φ
j
(x
j
) + ν
T
(s − Ax)
=
p
X
j=1
(φ
j
(x
j
) − ∆ν
j
x
j
) + ν
T
s,
where we interpret the Lagrangian dual variable ν
i
as
a potential at node i, and ∆ν
j
denotes potential differ-
ence across link j. For more details about the optimal
network flow problem, and the following material on
dual decomposition and subgradient methods please
refer to the manuscript (Boyd et al., 2003).
3.1 Dual network flow problem
The dual function is defined as the infimum of La-
grangian over the primal problem variables, and we
have
d(ν) = inf
x
L(x, ν)
=
p
X
j=1
inf
x
j
(φ
j
(x
j
) − ∆ν
j
x
j
) + ν
T
s
= −
p
X
j=1
φ
∗
j
(∆ν
j
) + ν
T
s,
where φ
∗
j
is the conjugate function of φ
j
.
We express the dual network flow problem as
maximize d(ν) = −
P
p
j=1
φ
∗
j
(∆ν
j
) + ν
T
s,
which is an unconstrained maximization of a concave
function and we can use appropriate optimization al-
gorithms to obtain an optimal dual solution ν
?
.
3.2 Subgradient methods
Since the dual function is a concave, but possibly non-
differentiable function, we will use a subgradient-
based method for its optimization. We will first derive
an expression for the subgradients of a negative dual
function.
Consider a dual function for the primal prob-
lem min
x
f
0
(x) subject to the equality constraints
f
i
(x) = 0, where i = 1, . . . , n. We will assume f
0
is
strictly convex, and denote,
x
∗
(ν) = argmin
z
(f
0
(z) + ν
1
f
1
(z) + · · · + ν
n
f
n
(z))
so the dual function is
d(ν) = f
0
(x
∗
(ν))+ν
1
f
1
(x
∗
(ν))+· · ·+ν
n
f
n
(x
∗
(ν)).
Then, a subgradient of the negative dual function −d
at ν is given by g
i
= −f
i
(x
∗
(ν)). The dual optimiza-
tion method will consist of maximizing the dual func-
tion by stepping in the direction of the subgradient g.
Thus, we obtain the subgradient method optimization
rules for the dual problem:
x
(k)
= x
∗
(ν
(k)
), ν
(k+1)
i
= ν
(k)
i
+ α
k
f
i
(x
(k)
).
In the case of optimal network flow problem (which
only has equality constraints Ax = s), subgradient at
ν is
g = Ax
∗
(∆ν) − s.
The ith component of subgradient is g
i
=
a
T
i
x
∗
(∆ν) − s
i
, which is the excess flow at node i,
but also the amount of data that q
i
would accumulate
after that iteration if we did not remove the queues.
Finally, the original optimal network flow problem
can be solved by applying the subgradient method op-
timization to its dual problem, and then recovering the
primal solutions after the algorithm converges. The
algorithm’s main steps are outlined below:
x
j
:= x
∗
j
(∆ν
j
)
g
i
:= a
T
i
x − s
i
ν
i
:= ν
i
− αg
i
where x
∗
j
(∆ν
j
) = argmin
x
j
(φ
j
(x
j
) − ∆ν
j
x
j
).
The method proceeds as follows. Given the current
value of node potentials, the flow for each link is lo-
cally calculated. We then compute the flow surplus at
each node. Again, this is local; to find the flow sur-
plus at node i, we only need to know the flows on the
links that enter or leave node i. Finally, we update the
potentials based on the current flow surpluses. The
update is very simple: we increase the potential at a
node with a positive flow surplus, which will result in
reduced flow into the node. Provided the step length α
can be computed locally, the algorithm is distributed;
the links and nodes only need information relating to
their adjacent flows and potentials. There is no need
to know the global topology of the network, or any
other nonlocal information, such as what the flow cost
functions are. Since we use the simplest subgradient
update method with constant step sizes α, this algo-
rithm is completely distributed.
Also since we use constant step sizes, this algo-
rithm (if stable) converges to the optimal solution (or
precisely, it converges to the ball of some arbitrary
radius R related to step size α and centered at the op-
timal solution). For more details about this algorithm
and its performance, please see (Boyd et al., 2003).
3.3 Optimal network flow in
dynamic setting
We can apply the optimal network flow algorithm de-
rived in the previous subsection to the problems in a
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
14

dynamic setting. Note that now each iteration step k
is the actual time t. The subgradient method finds the
optimal solution for network flows that satisfies the
flow conservation constraint; however, queues accu-
mulate the excess flow data and are not drained after
this initial build-up of data. This scenario is presented
in figures 1 and 2.
0 50 100 150
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
x1
x2
x3
x4
x5
x6
x7
Figure 1: Flows x
j
(t) vs time t with α = 2.5.
0 50 100 150
0
1
2
3
4
5
6
7
8
q1
q2
q3
q4
Figure 2: Queue sizes q
i
(t) vs time t with α = 2.5.
We see that link flows x
j
converge to their opti-
mal values (figure 1), while the queues accumulate
the excess flow until the flow conservation equality is
satisfied (figure 2).
4 BUNDLE SUBGRADIENT
METHOD AND ALGORITHM
We consider a simple modification for the static-time
dual subgradient method algorithm derived in the pre-
vious section. In order to discharge the queues we
will linearly add queue lengths q
i
(t) to the potential
updates ν
i
(t) in the algorithm. Therefore, our new
potential update step is:
ν
i
(t + 1) = ν
i
(t) − α
(t)
g
i
(t) + β
(t)
q
i
(t).
This modification can be interpreted as follows; we
adjust the potential at each node proportional to its
queue size in order to increase the flow out of that
node, while we still step in the direction of nega-
tive dual subgradient, which will reduce the excess
flow (future queue accumulation) for that node. If
the queue size is very large, then we greatly influence
the link flow out of that node (its queue discharge),
whereas if the queue size is small the link flow will be
mainly determined by balancing of excess flow equa-
tions. This rule should simultaneously decrease the
excess flow and queue lengths, as experimentally ver-
ified in section 6. Also note that our modification has
preserved the distributed nature of the algorithm; we
only require local queue information for each node.
The modified algorithm was applied to the static
case simulation, and the results shown in figures 3
and 4 verify that queues are discharged after the initial
build-up.
We have obtained an efficient queue regulation us-
ing this new algorithm, and next we will analyze its
theoretical performance.
4.1 Queues are subgradients
As we have already mentioned, queues are accumula-
tions of previous excess flows, which are subgradients
at the previous time points (iterations).
q(t + 1) − q(t) = Ax
∗
(∆ν(t)) − s(t) = g(t).
Assuming zero initial conditions at the start of the
network operation, then at time t = 0, 1, . . . , N , we
have
q(1) = g(0) = Ax
∗
(∆ν(0)) − s(0),
q(2) = g(0) + Ax
∗
(∆ν(1)) − s(1),
.
.
.
q(N + 1) =
N−1
X
t=0
g(t) + Ax
∗
(∆ν(N )) − s(N).
The original subgradient method iteration for dual
network flow problem is
ν
(k+1)
= ν
(k)
− α
k
g
(k)
,
where ν
(k)
is the voltage at kth iteration, g
(k)
is any
subgradient of −d at ν
(k)
, and α
k
> 0 is the kth step
size.
At each iteration, the subgradient method uses only
the current subgradient g (the current excess flow or
queue increment at time k).
DYNAMIC ROUTING AND QUEUE MANAGEMENT VIA BUNDLE SUBGRADIENT METHODS
15
0 50 100 150
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x1
x2
x3
x4
x5
x6
x7
Figure 3: Flows x
j
(t) vs t with α = 2.5 and β = 0.2.
0 50 100 150
0
0.5
1
1.5
2
2.5
3
3.5
q1
q2
q3
q4
Figure 4: Queues q
i
(t) vs t with α = 2.5 and β = 0.2.
4.2 Subgradient bundle method
We will define the subgradient bundle method itera-
tion as
ν
(k+1)
= ν
(k)
− α
k
w
(k)
,
where
w
(k)
=
½
g
(k)
k = 0,
g
(k)
+ β
k
w
(k−1)
k > 1.
Here, ν
(k)
is the voltage at kth iteration, g
(k)
is any
subgradient of −d at ν
(k)
, and w
(k)
is the subgradient
bundle (or memory) of −d at kth step. Now we have
two step size constants, α
k
> 0 is the kth step size
for excess flow update, and β
k
> 0 is the kth step
size for subgradient bundle. This new algorithm is a
variant of the subgradient bundle method, originally
developed independently by Lamarechal and Wolfe,
see (Lamarechal and Wolfe, 1975).
Switching from iterations k to the actual time t, we
have
w(t) = g(t) + β
(t)
w(t − 1)
= g(t) + β
(t)
˜q(t)
= ˜q(t + 1)
where ˜q(t) = cq(t), c ∈ R
+
, only if β
(t)
is a constant
step size. If we fix β = 1 for all t, then w(t) is pre-
cisely q(t +1), the queue size at the end of the current
time slot.
Thus, if we take the queue penalty functions to be
linear, ψ(q(t)) = q(t), we are simultaneously solv-
ing the optimal flow problem and minimizing queue
lengths. We can claim that we are searching for the
optimal point of our problem, where the subgradient
is equal to zero, and therefore the queue sizes will be
driven to zero.
5 CONVERGENCE PROOF
In this section, we derive the convergence results for
the bundle subgradient method applied to the optimal
network flow problem.
Let ν
?
be an optimal dual solution. Define conver-
gence ranges for step sizes α
k
and β
k
as
0 < α
k
≤
d(ν
?
) − d(ν
k
)
kw
(k)
k
2
,
and
β
k
=
(
−γ
(g
(k)
)
T
w
(k−1)
kw
(k−1)
k
2
if (g
(k)
)
T
w
(k−1)
< 0,
0 otherwise,
where γ ∈ [0, 2].
Using induction we will prove that for step sizes α
k
and β
k
satisfying the above convergence conditions,
we have
kν
?
− ν
(k+1)
k < kν
?
− ν
(k)
k (3)
and furthermore,
(ν
?
− ν
(k)
)
T
w
(k)
kw
(k)
k
≥
(ν
?
− ν
(k)
)
T
g
(k)
kg
(k)
k
, (4)
so the angle between w
(k)
and ν
?
− ν
(k)
is no larger
than the angle between g
(k)
and ν
?
− ν
(k)
.
Proof: Let d
?
= d(ν
?
) be the optimal value of the
dual function. By induction we will first show that
(ν
?
− ν
(k)
)
T
w
(k)
≥ (ν
?
− ν
(k)
)
T
g
(k)
, (5)
for all k. We have w
(0)
= g
(0)
, thus it holds for k = 0.
Assuming it holds for k, we will prove it for k + 1.
Since w
(k)
= g
(k)
+ β
k
w
(k−1)
, we have
(ν
?
− ν
(k+1)
)
T
w
(k+1)
= (ν
?
− ν
(k+1)
)
T
g
(k+1)
+
β
k
(ν
?
− ν
(k+1)
)
T
w
(k)
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
16

and using concavity of the dual function d and step
size convergence conditions, we obtain,
(ν
?
− ν
(k+1)
)
T
w
(k+1)
≥ (ν
?
− ν
(k+1)
)
T
g
(k+1)
,
and hence equation (5) holds for all k.
This inequality after some manipulations leads to
the conclusion that equation (3) holds true.
From the definitions of w
(k)
and β
k
we have
kw
(k)
k
2
− kg
(k)
k
2
= kg
(k)
+ β
k
w
(k−1)
k
2
− kg
(k)
k
2
= (β
k
)
2
kw
(k−1)
k
2
+
2β
k
(g
(k)
)
T
w
(k−1)
= (2 − γ)β
k
(g
(k)
)
T
w
(k−1)
≤ 0,
and therefore kw
(k)
k ≤ kg
(k)
k, which combined with
equation (5) implies that
(ν
?
− ν
(k)
)
T
w
(k)
kw
(k)
k
≥
(ν
?
− ν
(k)
)
T
g
(k)
kg
(k)
k
,
for all k, which proves that the convergence of the
bundle subgradient method is never worse than con-
vergence of the regular subgradient method. This
proof was inspired by a homework problem in (Bert-
sekas, 1999).
6 SIMULATIONS
6.1 Simulations setup
All simulations were performed using Matlab. Our
test network topology is presented in figure 5, it has
n = 5 nodes and p = 7 links. The node-link inci-
dence matrix for this network is
A =
1 1 0 0 0 0 0
−1 0 −1 1 0 0 0
0 −1 1 0 1 1 0
0 0 0 −1 −1 0 1
0 0 0 0 0 −1 −1
.
Link capacity vector was chosen to be
c = [.5; .5; .5; .5; .5; .5; 1],
and dynamical source rates s(t) behaviour versus
time is presented in figure 6. We have chosen node 5
to be the destination (sink) node for all of the traffic
originating at other nodes.
Source rates s
2
(t) and s
3
(t) oversaturate the net-
work since the maximum capacity of links on their
paths is equal to 1; therefore, for time period t =
[50, 150] we are guaranteed to have increasing queues
and a congested network.
PSfrag replacements
1
2
3
4
5
1
2
3
4
5
6
7
Figure 5: Test network with 5 nodes and 7 links.
0 50 100 150 200 250
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 50 100 150 200 250
0
0.5
1
1.5
2
s1
s2
s3
s4
PSfrag replacements
t
t
source rates
cumulative sink rate
Figure 6: Plot of source rates versus time.
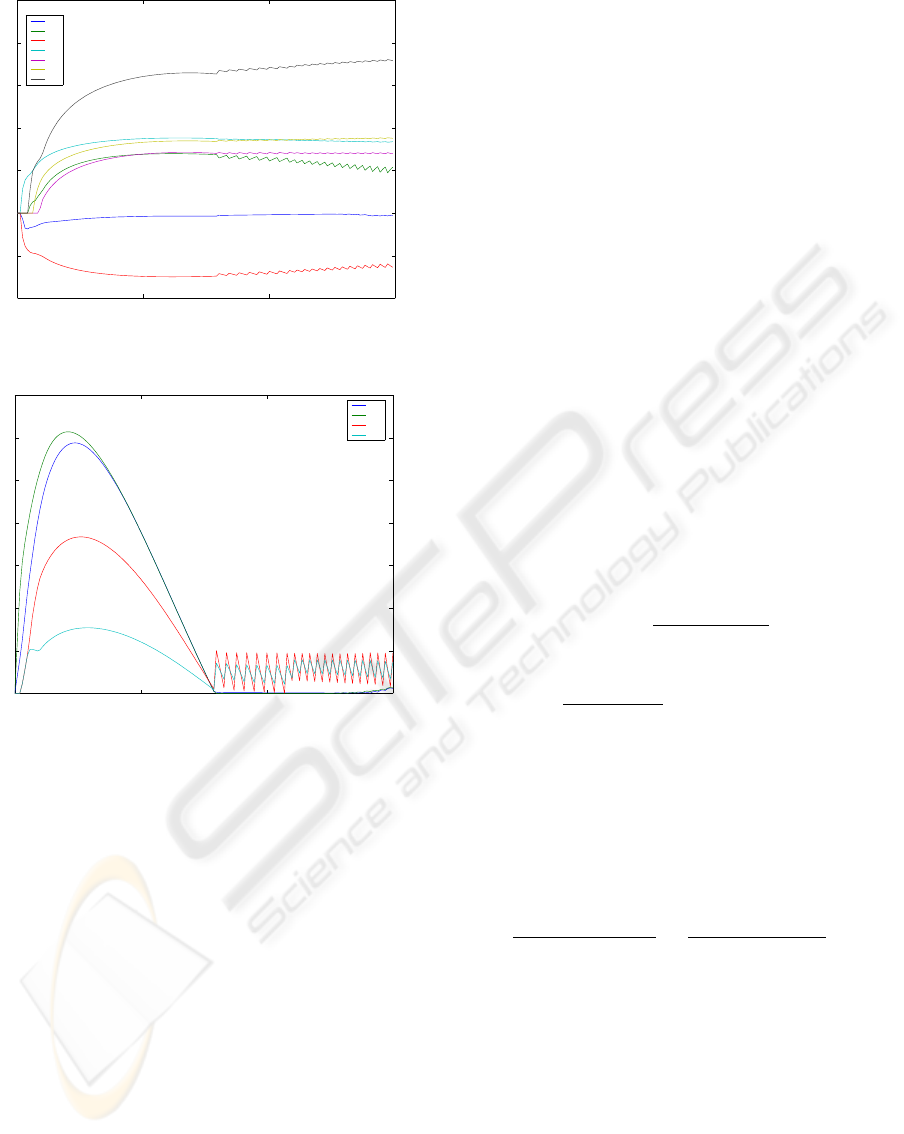
6.2 Algorithm performance
Performance with dynamical source rates is shown
in figures 7 and 8. The bundle algorithm with con-
stant step sizes α = 2.5 and β = 0.2 performs very
well. We note that it dynamically adjusts link flows
x
j
(t) as the network load changes. We notice that
during the time when network is over-saturated, the
queue lengths grow; however, as soon as user traffic
becomes feasible again, the queues are again driven
to zero.
Figures 9 and 10 show algorithm performance with
a more aggressive β parameter. We set constant step
sizes α = 2.5 and β = 1; therefore, we place more
weight on having small queue sizes. It is clear that
average queue size in the system is much smaller.
However, as we use larger step sizes our system be-
comes less stable. There is a clear trade-off between
queue size regulation and algorithm convergence and
smoothness.
DYNAMIC ROUTING AND QUEUE MANAGEMENT VIA BUNDLE SUBGRADIENT METHODS
17

0 50 100 150 200 250
−0.5
0
0.5
1
x1
x2
x3
x4
x5
x6
x7
Figure 7: Flows x
j
(t) vs t with α = 2.5 and β = 0.2.
0 50 100 150 200 250
0
2
4
6
8
10
12
14
16
18
20
q1
q2
q3
q4
Figure 8: Queues q
i
(t) vs t with α = 2.5 and β = 0.2.
7 CONCLUSION
Subgradient bundle methods are not a new idea; the-
oretical work in this area was started around 1975
by Lamarechal and Wolfe. Years of research cul-
minated in the development of an optimization algo-
rithm suite that is commonly referred to as the bundle
methods, and which is in wide use today for many
non-differentiable optimization problems.
In this paper we have derived a bundle-like subgra-
dient method, which is completely distributed since it
uses only locally available network information, and
which simultaneously routes the network traffic in a
dynamic manner and regulates queue sizes across the
network. Thus, we have achieved our goal of finding
a distributed algorithm for joint dynamic routing and
queue management. We are speculating that this is
the first time that bundle subgradient ideas have been
applied to the network routing and the solution of the
optimal network flow dual problem.
0 50 100 150 200 250
−0.5
0
0.5
1
x1
x2
x3
x4
x5
x6
x7
Figure 9: Flows x
j
(t) vs t with α = 2.5 and β = 1.
0 50 100 150 200 250
0
2
4
6
8
10
12
14
q1
q2
q3
q4
Figure 10: Queues q
i
(t) vs t with α = 2.5 and β = 1.
We have proved the convergence of our proposed
algorithm and stated convergence conditions for con-
stant step size update rules. Algorithm performance
and theoretical results were successfully verified us-
ing Matlab simulations.
In the future, we would like to extend our algorithm
to the changing step size rules such as the diminish-
ing step size, and try to obtain absolute performance
limits for a bundle-type subgradient network routing
algorithm. We would also like to unify our sugradient
convergence proof method with works by (Athuraliya
and Low, 2000) and (Imer and Basar, 2003).
REFERENCES
Athuraliya, S. and Low, S. (2000). Optimization flow
control – II: Implementation. http://netlab.
caltech.edu.
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
18

Bertsekas, D. P. (1999). Nonlinear Programming. Athena
Scientific, second edition.
Bertsekas, D. P. and Gallager, R. (1991). Data Networks.
Prentice-Hall, second edition.
Boyd, S. and Vandenberghe, L. (2003). Convex Optimiza-
tion. Cambridge University Press.
Boyd, S., Xiao, L., and Mutapcic, A. (2003). Subgra-
dient methods - EE392o class notes, Stanford Uni-
versity. http://www.stanford.edu/class/
ee392o/subgrad method.pdf.
Imer, O. and Basar, T. (2003). Dynamic optimization flow
control. In IEEE Conference on Decision and Control,
pages 2082–2087.
Lamarechal and Wolfe (1975). Nondifferentiable optimiza-
tion. In Mathematical Programming Study, volume 3.
Segall, A. (1977). The modeling of adaptive routing in
data-communication networks. IEEE Transactions on
Communications, 25(1):85–95.
DYNAMIC ROUTING AND QUEUE MANAGEMENT VIA BUNDLE SUBGRADIENT METHODS
19
