
ROBUST IMAGE SEGMENTATION BY TEXTURE SENSITIVE
SNAKE UNDER LOW CONTRAST ENVIRONMENT
Shu-Fai WONG and Kwan-Yee Kenneth WONG
Department of Computer Science and Information Systems
The University of Hong Kong
Keywords:
Image Processing Applications, Image Segmentation, Texture Analysis, Medical Image Analysis
Abstract:
Robust image segmentation plays an important role in a wide range of daily applications, like visual surveil-
lance system, computer-aided medical diagnosis, etc. Although commonly used image segmentation methods
based on pixel intensity and texture can help finding the boundary of targets with sharp edges or distinguished
textures, they may not be applied to images with poor quality and low contrast. Medical images, images cap-
tured from web cam and images taken under dim light are examples of images with low contrast and with
heavy noise. To handle these types of images, we proposed a new segmentation method based on texture clus-
tering and snake fitting. Experimental results show that targets in both artificial images and medical images,
which are of low contrast and heavy noise, can be segmented from the background accurately. This segmen-
tation method provides alternatives to the users so that they can keep using imaging device with low quality
outputs while having good quality of image analysis result.
1 INTRODUCTION
Image segmentation is one of the hot topics in the
field of image processing and computer vision. Ro-
bust image segmentation provides solution to back-
ground subtraction and object detection. Recent tech-
nology depends heavily on robust object location such
that people detection in visual surveillance applica-
tion, organ detection in computer-aided medical di-
agnosis and surgery, and background elimination in
video compression can be made possible and reliable.
Image segmentation is commonly done by two ma-
jor approaches, namely pixel intensity analysis and
texture analysis. A comprehensive survey on segmen-
tation using intensity analysis can be found in (Pal and
Pal, 1993) and those on texture segmentation can be
found in (Chellappa and Manjunath, 2001). In pixel
intensity analysis, the color intensity or the grayscale
level of each pixel will be analysed independently.
Segmentation is done by grouping pixels according
to the similarity of their intensity value. The ma-
jor problem of such approach is that it works under
the strong assumption of targets with homogeneous
intensity value. In addition, analysing pixels inde-
pendently is error-prone under non-Gaussian noise
model. To relax the assumption and limitation, new
segmentation approach using texture was developed.
In texture analysis, a texture model is used to describe
a region of interest. Patches with similar features in
texture model will be grouped together and form a
larger patch. Segmentation is then done by grouping
of such patches. The major problem in using texture
analysis is to find an optimal texture model (e.g. size
of the patch, intensity pattern) and this is time con-
suming and computationally complicated.
In daily applications, images are of low quality
and with heavy noise. Medical images, images cap-
tured from webcam and images taken under dim light
are the examples of such kinds of images. To seg-
ment target from such images, traditional segmenta-
tion approaches may not be an ideal choice. Segmen-
tation using intensity will be affected by the heavy
noise while segmentation by texture will be not ro-
bust enough to be used in daily applications.
In this paper, we proposed a supervised texture
analysis algorithm that combine the advantage of both
intensity analysis and texture analysis to segment tar-
get from image with low contrast and heavy noise.
The proposed algorithm will learn the edge texture
pattern from the image during learning phase. The
edge pattern can be discovered in the testing image
afterward. A snake is then fitted towards the edge.
430
WONG S. and Kenneth WONG K. (2004).
ROBUST IMAGE SEGMENTATION BY TEXTURE SENSITIVE SNAKE UNDER LOW CONTRAST ENVIRONMENT.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 430-434
DOI: 10.5220/0001146104300434
Copyright
c
SciTePress
The testing image can then be segmented. The size
of the edge texture patch is deterministic as the edge
along certain direction will not occupy large number
of pixel cells. The pattern can then be learnt and clas-
sified as in intensity analysis. The texture patch is
used instead of intensity of single pixel, such that the
pattern itself is not susceptible to the noise.
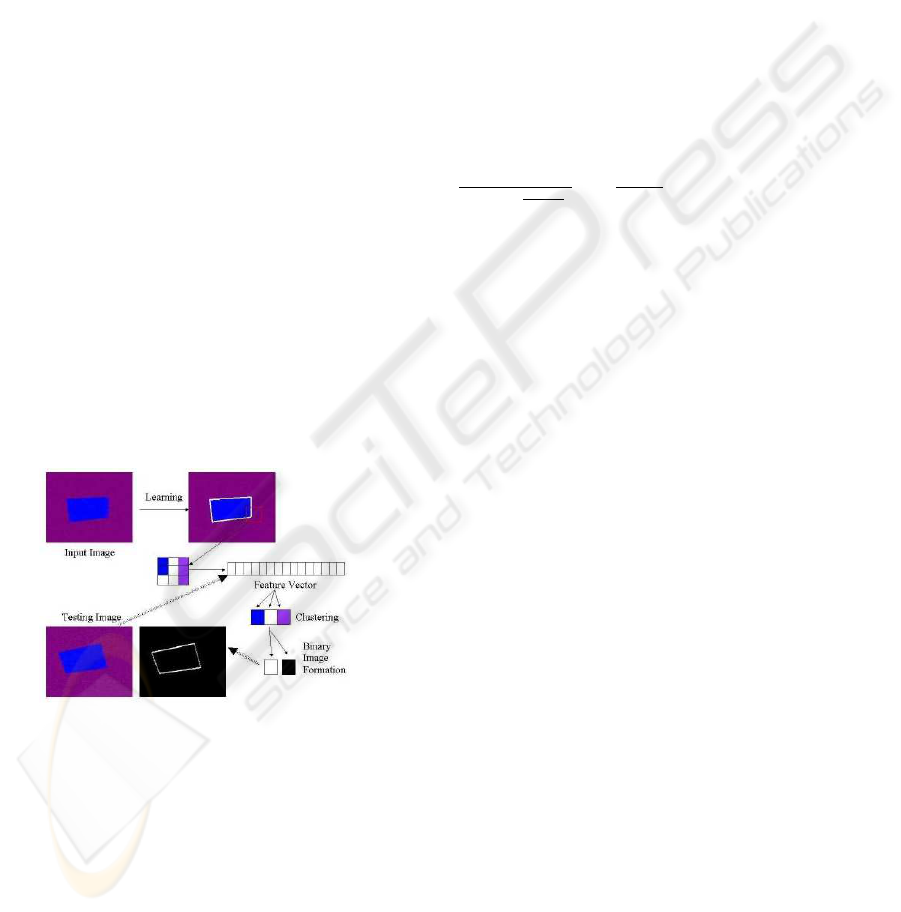
2 SYSTEM ARCHITECTURE
The whole system performs analysis in 2 phases,
namely learning phase and testing phase. During the
learning phase, both the image and the edge infor-
mation will be analysed by the system. The system
will extract texture feature from the image. The rep-
resentation of texture feature will be discussed in Sec-
tion 3. Such feature will be clustered into groups. The
groups is then further classified into edge or non-edge
texture according to the edge information given. The
association between the texture feature and the final
group is then established. The clustering algorithm
will be explored in Section 4. During testing phase,
the texture feature of testing image will be extracted.
Finally, classification can be done by comparing the
cluster means and the model energy and by applying
the cluster association rule. Based on the classifica-
tion result, foreground can be extracted. The details
will be given in Section 5. The flow is summarized in
figure 1.
Figure 1: Logic flow of the proposed system.
3 TEXTURE ANALYSIS BY MRF
Markov Random Field was first developed for texture
analysis, e.g. (Cross and Jain, 1983). It can be used to
describe a texture and make prediction on the inten-
sity value of a certain pixel given the intensity value
of its neighborhood. The theories related to Markov
Random Field can be found in (Chellappa and Jain,
1993).
In Markov Random Field, the neighborhood is
defined as clique elements. Consider that S =
{s
1
, s
2
, .., s
P
} is a set of pixels inside the image, and
N = {N
s
|s ∈ S} is the neighborhoods of the set
of pixels. In the system, the neighborhoods are the 8
pixels that with chessboard distance 1 away from the
target pixel.
Assuming X = {x
s
|s ∈ S} is the random vari-
ables (the intensity value) for every pixel inside an
image, where x
s
∈ L and L = {0, 1, .., 255}. Be-
sides, we have a class set for texture pattern, Ω =
{ω
S
1
, ω
S
2
, ..., ω
S
P
} where ω
S
i
∈ M and M is the set
of available classes. In the proposed system, we have
only two classes, the edge and the non-edge classes.
In Markov chain analysis, the conditional prob-
ability of certain pixel being certain class is given
by Gibbs distribution according to Hammersley-
Clifford theorem. The density function is π(ω) =
1
P
ω
exp(
−U (ω)
T
)
exp(
−U(ω)
T
), where T is the temper-
ature constant, which is used in stimulated anneal-
ing. The energy term can be further represented as
U(ω, x
i
) = V
1
(ω, x
i
) +
P
i
0
∈N
i
β
i,i
0
δ(x
i
, x
i
0
),where
V
1
(ω, x
i
) represents the potential for pixel with cer-
tain intensity value belongs to certain class and the
δ(x
i
, x
i
0
) is the normalised correlation between pixel
at s
i
and those at s
i
0
.
When the texture is being learnt by the feature
learning module, the set of β
i,i
0
is estimated accord-
ing to the requirement that the probability of its as-
sociated texture class will be maximised. The esti-
mation algorithm used in the system is simulated an-
nealing. The set of β
i,i
0
corresponds to the correlation
value and thus represents the configuration of the pix-
els such that it can be classified as that texture class.
In the system, this set of estimated β will be used as
texture feature vector. It will be used as input of sup-
port vector machine such that the association between
texture feature and texture class can be formed.
4 TEXTURE CLUSTERING
USING K-MEAN ANALYSIS
K-mean clustering algorithm has been widely used in
application that need unsupervised classification. Al-
though there is a learning set in the proposed system,
the noise in the image will greatly reduce the relia-
bility of the learning set. To identify those outliers in
the learning set, unsupervised clustering will be per-
formed first. The implementation of k-mean cluster-
ing algorithm can be found in (Duda et al., 2000).
After performing k-mean clustering on the feature
vectors β, supervised association will be done. Given
several clusters after k-mean clustering, some of them
correspond to a edge patch with gradient change a
ROBUST IMAGE SEGMENTATION BY TEXTURE SENSITIVE SNAKE UNDER LOW CONTRAST
ENVIRONMENT
431

along certain direction while the remaining corre-
spond to the non-edge patch, noisy patch or corner
patch. Labeling of the cluster is then done accord-
ing to the association information from the learning
set. Outliers will be ignored during the labeling stage.
Finally, an association between texture feature vector
and “edge and non-edge” classes can be formed.
In testing stage, classification can be done simply
by extracting the texture feature and then using the
association rule formed. Applying such classifica-
tion scheme on the whole image, a binary map can be
formed with ‘1’ means edge and ‘0’ means non-edge.
5 TEXTURE SEGMENTATION BY
SNAKE FITTING
Active contour (Kass et al., 1987) had been used in
pattern location and tracking (Blake and Isard, 1998)
for a long time. It is good at attaching to object with
strong edge and irregular shape. The snake can be
interpreted as parametric curve v(s) = [x(s), y(s)].
In the proposed system, the initial position of the
active contour is the bounding box of the searching
window. The active contour will move according to
the energy function, E
∗
snake
=
R
1
0
{[E
int
(v(s))] +
[E
texture
(v(s))] + [E
con
(v(s))]}ds, where E
int
rep-
resents the internal energy of the snake due to
bending, E
texture
represents the texture-based image
forces, and E
con
represents the external constraint
forces. The snake is said to be fitted if the E
∗
snake
is minimised.
The equation is the same as the traditionally used
snake-equation but with texture-based image force re-
places the original “edge-based” image force. Since
the image is of noisy and low contrast, noise will in-
troduce dozens of distracting edges under pixel-based
analysis. If the “edge-based” energy is used, the cor-
responding snake will be highly unstable and inac-
curate. Thus, texture-based energy is used in the
proposed system. Texture energy is lower near the
patch that shows texture changes towards edge texture
and thus the snake will shrink towards strong edge in
the binary texture binary map described in Section 4.
Texture represents a patch of pixels instead of a sin-
gle pixel and texture-based analysis is more tolerant
to noise compare with pixel-based analysis. Thus,
texture-based analysis is a much reliable than edge-
based analysis for snake implementation.
6 EXPERIMENT AND RESULT
The proposed system was implemented using Visual
C++ under Microsoft Windows. The experiments
were done on a P4 2.26 GHz computer with 512M
Ram running Microsoft Windows.
6.1 Experiment 1: Artificial Noisy
and Low Contrast Images
In this experiment, the classifier is trained to recog-
nize edge in artificial images with heavy noise and
of low contrast. A texture-sensitive snake is then fit-
ted towards the texture-edge from the initial position
close to the real edge. The result is shown in figure 2.
It shows that the binary image (texture map) match
the edge quite well. The snake can fit toward the
edge quite well too. The relative root-mean-square
error (i.e. the relative distance between the control
points and the real edge) is less than 5% when com-
paring with ground truth images. The processing time
is around 10s where the images with average size 267
x 255 pixels.
Figure 2: The first row shows the segmentation result of
using noisy image while the second row shows the result
of using low contrast image. The left-most images are the
testing images. Middle images are the corresponding binary
map after final classification. The right-most images show
the result of snake-fitting.
6.2 Experiment 2: Low Contrast
and Noisy Medical Image
In this experiment, the backbone has to be segmented
from the medical image with poor quality and low
contrast. Actually, the image may not be segmented
easily manually. The result of segmentation is showed
in figure 3. It shows that the snake can fit some of the
backbones very well. The accuracy cannot be deter-
mined here due to no ground truth image provided.
The processing time is around 18s where the image
with size 600 x 450 pixels.
ICINCO 2004 - ROBOTICS AND AUTOMATION
432

Figure 3: The left-most image is the given medical image.
The second left image shows enlarged portion of the first
image. The third image is the corresponding binary map.
The last image is the result of snake-fitting.
6.3 Experiment 3: Comparison with
other approaches
In this experiment, pixel-based analysis, texture-
based analysis and traditional snake-fitting are per-
formed on images used in experiment 1 and 2. The
results are shown in figure 4, figure 5 and fig-
ure 6 respectively. From the results, it seems that
the proposed method performs better than these ap-
proaches. Pixel-based analysis cannot perform well
without knowing the optimal similarity-tolerant level.
In texture-based analysis, color patches extracted are
not semantically connected (i.e. color patches can be
corners, edges and heterogeneous region) and there
are so many clusters (in black color) are unclassified
due to the noisy nature. Traditional snake approach is
sensitive to cluttered background and image noise.
Figure 4: The result of applying pixel-based analysis is
shown. These rows show the result of using artificial noisy
image, low contrast image and medical image respectively.
The images on first column are the testing images, the im-
ages on the second column are resultant images on low
similarity-tolerant level, while images on the third column
are resultant images on high similarity-tolerant level. The
two largest clusters consists of pixels with similar attributes
are indicated by black and white. Those unclassified and
small pixel patches are kept in original color.
Figure 5: The result of applying texture-based analysis is
shown. The rows are ordered in the same way as in Figure 4.
The images on first column are the testing images while
those on second column are the resultant image. Patches
with similar texture are grouped together and form a color
cluster. Those small patches cannot be grouped together are
indicated by black color.
Figure 6: The results of using snake approach are shown.
The rows are ordered in the same way as in Figure 4. The
first column shows the input image. The second column
shows the edge detection result on unsmoothed input image
while the third column shows the edge detection result on
smoothed input image. The fourth column shows the equal-
ized result of the resultant image on the third column. The
last column shows the snake applied on the the input image
with reference to the edge map on the third column.
7 CONCLUSIONS
There is a demand of segmenting a target from im-
ages with low contrast and heavy noise in application
like medical imaging. However, commonly used im-
age segmentation approach can only work properly
if the input image has homogeneous intensity or tex-
ture of high quality. The proposed segmentation al-
gorithm aims at segmenting a target from an image of
low quality by texture pattern extraction and cluster-
ing. To have better and more accurate segmentation
result, a snake is fitted towards to edge pattern such
that the boundary of the target can be captured. It
combines the advantages of using pixel analysis and
texture analysis such that it can segment the target
from an image of low quality in the experiments.
ROBUST IMAGE SEGMENTATION BY TEXTURE SENSITIVE SNAKE UNDER LOW CONTRAST
ENVIRONMENT
433

REFERENCES
Blake, A. and Isard, M. (1998). Active Contours. Springer.
Chellappa, R. and Jain, A. (1993). Markov Random Fields:
Theory and Applications. Academic Press.
Chellappa, R. and Manjunath, B. (2001). Texture classifi-
cation and segmentation. In FIU01, page Chapter 8.
Cross, G. and Jain, A. (1983). Markov random field texture
models. PAMI, 5(1):25–39.
Duda, R. O., Hart, P. E., and Stork, D. G. (2000). Pattern
Classification. John Wiley and Sons, Inc., second edi-
tion.
Kass, M., Witkin, A., and Terzopoulos, D. (1987). Snakes:
Active contour models. In Proc. Int. Conf. on Com-
puter Vision, pages 259–268.
Pal, N. and Pal, S. (1993). A review on image segmentation
techniques. PR, 26(9):1277–1294.
ICINCO 2004 - ROBOTICS AND AUTOMATION
434
