
PREDICTIVE QUERYING IN SPATIO-TEMPORAL
ENVIRONMENT
Sam Makki, Ho Ling Hsing, Demetrios Kazakos
Department of Electrical Engineering and Computer Science
University of Toledo, Toledo, Ohio, USA
Keywords: Spatial, temporal, tree, query, index, moving objects
Abstract: Moving objects are spatial objects in which their positions change over the time. The process of
storing the location information and processing queries efficiently on these moving objects are
challenging problems in spatio-temporal databases. Many researches have been conducted to address
the storing and querying problems related to moving objects. The majority of these researches
concentrated on modifying and optimizing the indexing techniques for querying moving objects.
These indexing approaches update and retrieve the locations of moving objects by traversing the nodes
and inserting and deleting the nodes in the index structures. These insertion and deletion operations
eventually lead to the rebuilding of the index structures in order to maintain query performance.
However, periodic rebuilding of index structures can be expensive and it should be avoided if possible.
To tackle this problem, we propose alternate method to query the positions of moving objects. The
proposed method uses a double-grid structure that eliminates the need for insertion and deletion
operations during updates and retrieval. The advantages of using a double-grid structure instead of
indexing are the significant improvement in time for querying moving objects, and the elimination of
the need to rebuild the grid structure.
1 INTRODUCTION
The process of storing and processing queries on the
location of dynamic objects produced a number of
new and challenging issues, as the traditional
databases can only store and allow querying of static
data. The static data has either spatial or temporal
characteristics. However many objects in real world
are not static but rather they are dynamic (or
moving). Therefore neither the spatial nor temporal
database is able to store these objects. To store these
objects in a database, such database must have the
capabilities of both spatial and temporal databases.
If these capabilities are integrated, then moving
objects can be represented in a database. This type
of database is termed spatio-temporal database.
Spatio-temporal databases are the same as spatial
databases except the objects are moving. Spatio-
temporal databases usually involve the
representation and querying of physical objects.
Such a database can be used to provide location
based services because it keeps track of the locations
of different objects (Wolfson).
In traditional databases, the attributes of an object
are static, which means that these attributes change
only when users make explicit updates to them. On
the contrary, in spatio-temporal databases, the
attributes of a moving object are called dynamic
attributes which are attributes that change constantly
as a function of time (Sistla, et al, 1997). An
example of a dynamic attribute are the coordinates
of a moving object (x,y). Whenever a dynamic
attribute is queried, the returned answer represents
the set of possible values of the dynamic attribute at
the time the query is submitted. In other words, the
spatio-temporal model that uses dynamic attribute is
different from traditional database systems, since
traditional database systems return the same answer
from the attribute regardless of the time at which the
query is submitted. The answer may be different at
1:00pm and 1:30pm even though the database has
not been explicitly updated during this 30-minute
period. Another important difference between
traditional databases and spatio-temporal databases
is that the answer to future queries is tentative. This
means that the query results returned by spatio-
temporal databases are accurate based on what are
281
Melendi D., G. Pañeda X., García R., Bonis R. and G. García V. (2004).
DEPLOYMENT OF LIVE-VIDEO SERVICES BASED ON STREAMING TECHNOLOGY OVER AN HFC NETWORK.
In Proceedings of the First International Conference on E-Business and Telecommunication Networks, pages 281-286
DOI: 10.5220/0001383102810286
Copyright
c
SciTePress

currently known about the moving objects.
However, since this current information can change,
the answers to the queries can change as well.
Indexing dynamic attributes enables answering
queries regarding moving objects without examining
all the objects.
Spatio-temporal databases usually represent
objects’ movements as motion functions. The most
common function represents linear motion because it
requires the minimum number of parameters.
Moreover, it can be used to describe more complex
movements using interpolation.
To store moving objects in a database, their
motion information can be stored using the motion
parameters and location functions. The location
functions are used to compute the positions of any
moving objects at any time (
Porkarw et al, 2001).
Depending on the type of applications, initial values
of motion parameters such as starting location and
velocity are required. The location function can then
predict the position of a moving object at any time.
After the motion information of a moving object
is stored in a database, the next step is to determine
how often the motion information can be updated
since the location of the moving object is constantly
changing. If the database is updated every time
when the object is moved, then tremendous amounts
of resources will have to be used and yet the query
result will still not be precise. So a different
approach has to be taken to handle the updating of
the motion information.
There are a number of approaches that can be
used to update the location of a stored moving
object. One of the approaches is that, updates are
triggered whenever there is a change in the motion
parameter (Wolfson). The second approach is that
an update is necessary only when the velocity
changes. The other approach is the use of a
deviation threshold (Meng et al, 2003). The
deviation threshold of a moving object can be set
first and the database is updated only when the
deviation exceeds this threshold value. The actual
update can include the current location, current
velocity, and current direction.
The majority of papers (
Porkarw et al 2001,
Theodoridis et al, 1998) proposed the use of the tree
structure for indexing moving objects stored in
spatio-temporal databases. An alternative method to
query the positions of moving objects is proposed in
this paper. The proposed method involves the use of
a double-grid index structure that can represent
moving objects’ data in spatio-temporal databases.
The topics discussed and the order that they are
presented in this paper are as follows: Section 2
introduces the types of Spatio-temporal Queries.
Section 3 describes the query languages for spatio-
temporal databases and gives examples of the query
languages. Section 4, 5 describe the different types
of access methods and indexing queries and their
shortcomings. Section 6 describes our proposed
method in representing moving objects. Section 7
gives conclusions and directions for future work.
2 TYPES OF SPATIO-TEMPORAL
QUERIES
There are various types of spatio-temporal queries
that can query a moving object based on the type of
application. They are range query, k-nearest
neighbor query, and spatio-temporal join query.
A range query retrieves the objects that are within
distance x from a region R within a query interval T
(between times t1 and t2) (Wolfson). The following
sentence is an example of a range query. “Retrieve
all the trucks that are within 10 miles from the
University of Toledo between 2pm and 3pm”.
A k-nearest neighbor query specifies a query
point and retrieves the k objects that will come
closest to the query point during the query interval T
(Kollios 2003). An example of a k-nearest neighbor
query is “Retrieve all the taxi cabs that are closest to
1234 Douglas road at around 10am”.
A spatio-temporal join query will return all pairs
of objects from two sets of data that will come
within distance d from each other during the query
interval T (Kollios 2003). For example, “Retrieve
the pair of taxi cabs that will be within 2 miles from
each other”.
These three types of queries (i.e. range query, k-
nearest neighbor query, and join query) can be sub-
categorized based on the time interval of the query.
These sub-categories are past queries, present
queries (these are the type of queries that traditional
databases can handle), future queries, and triggers
(Wolfson).
The followings are some examples:
1- Past Query: How many airplanes in LAX were
delayed by more than an hour in 2003?
2- Present Query: How many restaurants are there
within 2 miles of my current location?
3- Future Query: Retrieve the trucks that will reach a
certain destination within 20 minutes.
4- Trigger: Send me a message when the mailman is
within 1 mile of my home address.
ICETE 2004 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
282

3 QUERY LANGUAGES FOR
SPATIO-TEMPORAL
DATABASES
Structured Query Language (SQL) works well for
static data but it will be cumbersome if it is used for
querying the locations of moving objects. The
reason is that SQL do not have temporal operators
that can be used to describe the temporal aspects of
moving objects (Sistla, et al, 1997). Therefore a
query language that is capable of querying moving
objects, but simpler to use is needed. One of the
proposed query languages is called Future Temporal
Logic (FTL) language (Wolfson). FTL has
SQL/OQL type syntax. As an example consider the
following query.
Retrieve all cars that will enter highway H in the
next 10 minutes and stay on H for 20 minutes.
RETRIEVE C.type
WHERE Not Inside(C,H)
AND Eventually-within-10 (Always-for-20 (Inside
(C,H))
AND H.type = highway
4 SPATIO-TEMPORAL
DATABASES ACCESS
METHODS
The location of any moving objects at any particular
time has to be modelled or predicted before it can be
queried. Over the years, many spatio-temporal
access methods have been developed to support
spatio-temporal queries. Most of the proposed
spatio-temporal access methods use a
multidimensional index structure for storing and
querying the positions of moving objects. The goal
of multidimensional index structures is to index a
large number of 3-D trajectories in order to perform
efficient querying and updating of trajectories. Most
of these access methods are tree structures (
Porkarw
et al 2001, Theodoridis et al, 1998) and the various
tree structures from different papers are basically
derived from R-tree (
Guttman, 1984), which is a
spatial access method. Besides indexing the
locations of moving objects, indexing the queries of
moving objects has also been proposed by
Kalashnikov et al, 2002. Query indexing is
especially useful when there are numerous
concurrent, continuous queries over large numbers
of moving objects.
The spatio-temporal access methods can be
grouped into three categories based on the type and
time of the queries they can support (i.e. the past,
current, and future queries) (Mokbel et al, 2003).
The three categories include methods that are:
1- indexing the past (i.e. index historical spatio-
temporal data)
2- indexing the current (i.e. keep track of the current
status of spatio-temporal data)
3- index the future (i.e. help answer/predict queries
related to the future)
However according to Kalashnikov et al, using
multidimensional indexes requires constant updating
if the moving objects keep moving and this leads to
poor query processing performance. To counter this
problem, many indexing methods proposed to limit
the updating frequency of the locations of moving
objects by using motion functions. However, this is
also a drawback because as the updating frequency
is decreased, the uncertainty of the positions of
moving objects increases.
Most of the indexing methods employ the idea of
MBRs to represent moving objects. MBRs are a
good idea for representing static objects or objects
with low mobility (e.g. multimedia objects) but they
can introduce a lot of unused space (Nievergelt et al,
1984) in the index structure when used to represent
objects with high mobility and this leads to
inefficient indexing (Theodoridis et al, 1998).
Furthermore in the case of moving objects, since
it is expected that there are many insert and delete
operations in the tree structure, the query
performance can deteriorate over time. This is
attributed to the fact that the tree structure may
eventually become unbalanced. When this happens,
the whole tree structure will have to be rebuilt
periodically to ensure it is working under optimum
performance level. However, rebuilding an index is
an expensive operation and it should be avoided if
possible.
5 INDEXING THE QUERIES
The indexing methods that have been mentioned so
far indexes the moving objects with tree structures
according to their spatial proximity. However, if the
locations of moving objects are continuously
queried, these indexing methods will suffer from the
problems of constant updating which will result in
poor performance. To tackle this problem, an
indexing method with a different approach was
proposed by Kalashnikov et al, 2002. This
particular indexing method attempts to index the
possible set of queries for moving objects instead of
their locations. In particular, these possible queries
are continuous range queries.
PREDICTIVE QUERYING IN SPATIO-TEMPORAL ENVIRONMENT
283

In contrast to regular queries that are evaluated
once, continuous queries stay active over a period of
time and have to be continuously evaluated during
this period of time. If there are a considerable
number of queries and moving objects, it is
impossible to keep evaluating each query whenever
an object moves. For this reason, Kalashnikov et al,
stated that the traditional approach is not a practical
approach for indexing moving objects. They
believed that evaluating all queries periodically with
consideration of the most recent positions of moving
objects is more preferable. In order for the results of
the continuous query to be useful, the goal of
evaluating continuous queries should be, to keep the
evaluation period as short as possible.
As the name implies, query indexing is about
indexing queries, not about indexing the locations of
moving objects. In comparison, the set of queries
change less frequently than the set of locations of
moving objects. Therefore, there is no need to
change the query index unless the set of queries
change. Furthermore, this approach does not impose
any constraints on the velocities or routes taken by
the moving objects. In other words, the moving
objects can move in any way they desire without
affecting the query performance.
Query indexing uses the simple one-level grid
index approach and the grid index is a 2-D array of
cells. The grid index is partitioned uniformly in
cells and each cell represents a space region. This is
a better approach than other traditional indexing
approaches such as Quad-tree, especially when the
data is skewed. This is because the grid structure
will not become lopsided like tree structure
.
Although this approach does not make any
assumptions about the velocity or route taken of
moving objects, it does assume that the information
about updated locations of these moving objects are
already available. How often the location
information of moving objects is updated has a
significant impact on the query performance and
precision. Without considering this factor, the actual
performance of the query indexing approach cannot
be accurately determined.
5.1 Update and Retrieval
The indexing methods mentioned in (Porkarw et al
2001, Theodoridis et al, 1998) use the tree structure
to index moving objects. Updates sometimes require
inserting or deleting nodes when there are overflows
or underflows respectively. This is an efficient
method for static objects but not for moving objects.
There can easily be overflows or underflows in the
tree structure because of the nature of moving
objects. Numerous insertions and deletions of nodes
in a tree can have significant impacts on the query
performance. Additionally, the whole tree structure
might have to be traversed before a query result can
be returned. However, this is not the case for the
grid structure. Retrieval using a grid structure can
be done in a shorter time than tree structure because
there are no nodes to traverse. The location of a
certain moving object can just be retrieved at the
appropriate cell in the grid. Likewise, when the
location of a certain moving object needs to be
updated, it can be updated at the cell where the
previous location of the moving object is stored.
5.2 Index Rebuilding
When there are numerous insertions or deletions of
nodes in a tree structure for a certain period of time,
it is very likely that the tree structure becomes
unbalanced, which leads to deterioration in query
performance. This will inevitably require
rebuilding, which reorganizes the structure of the
index to eliminate fragmentation, to maintain
optimal query performance. However, rebuilding is
an expensive operation in terms of time and I/O
resources. Since a grid index is always a balanced
structure, it does not require rebuilding no matter
how many updates there are to the index. In other
words, the grid index can maintain its optimum
query performance even without rebuilding.
6 PROPOSED METHOD
As established in previous sections, grid structures
are preferable over tree structures in terms of the
time required to update and retrieve the locations of
moving object and the need to rebuilding the index
structure. According to (Prabhakar et al., 2002), a
no-index strategy yields better performance when
querying moving objects. Therefore, instead of
developing an indexing approach which is based on
R-tree or its derivations. We propose to query
moving objects using a double-grid index structure.
The propose method is based on following two
criteria for improving query operation of moving
objects: firstly it can update and retrieve in shorter
time than the conventional tree structure approach.
Secondly it does not require periodic rebuilding.
The double-grid index structure as depicted in
Figure 1 uses two grid structures, the first grid is
called the ‘actual location grid’ and the second grid
is called the ‘storage grid’.
The actual location grid encloses the actual
moving objects (along with their IDs and pointers)
ICETE 2004 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
284
which can move in any one of the cells in the grid
structure.
Figure 1: The actual location grid and storage grid.
The IDs and pointers are linked to the records of the
moving objects’ location in the storage grid. The
actual locations of various moving objects are
assumed to be received via Global Positioning
System (GPS) which is a widely used technology,
(GPS is used to track the locations of moving
objects). The ‘storage grid’ stores the moving
objects’ IDs, locations, and the time at which they
move to the location. Since there can be more than
one moving object in a cell, each cell in the storage
grid can store multiple records for multiple moving
objects.
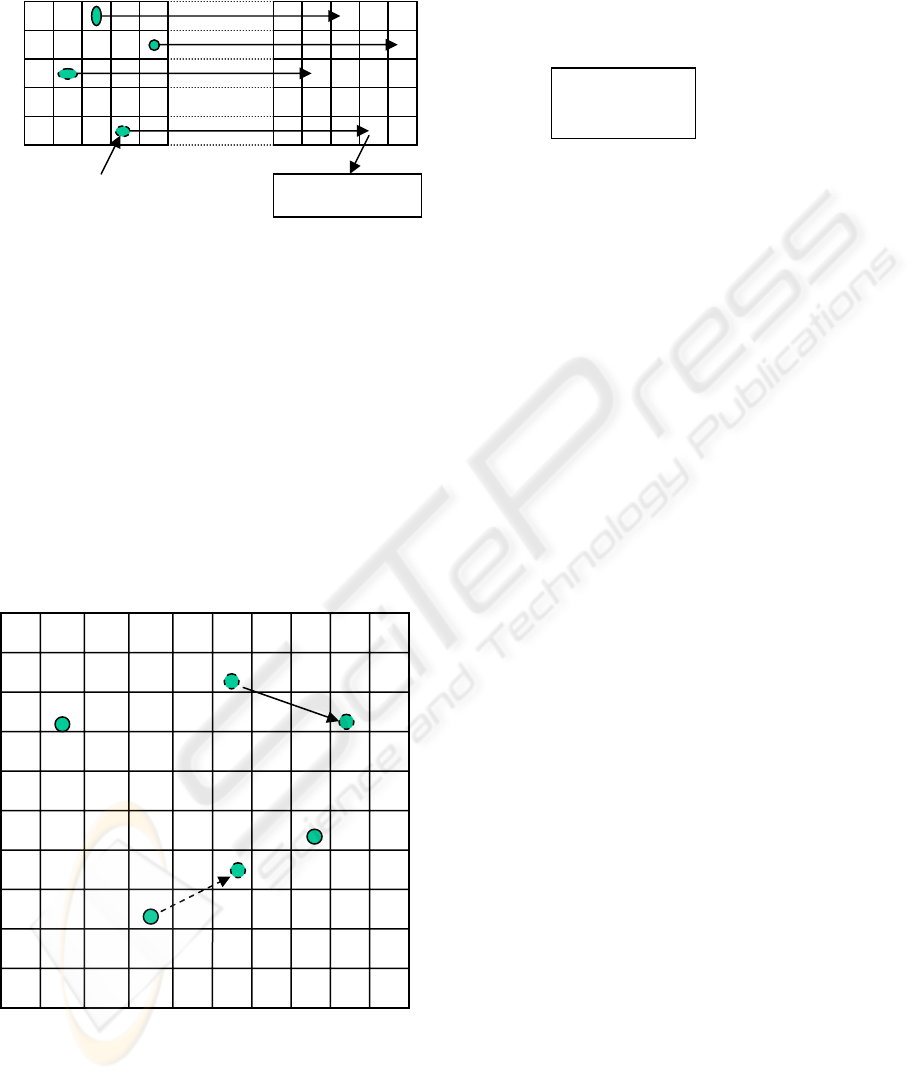
Figure 2: There are four moving objects in the actual
location grid here.
The coordinates for thefour moving objects are
M1(2,8), M2(4,3), M3(6,9), M4(8,5). M2 and M3
move to different grids.
As an example as shown in Figure 2, suppose that
the IDs of the moving objects are M1, M2, M3, and
M4 and their respective initial locations are (2,8),
(4,3), (6,9), and (8,5) in the actual location grid.
Assume M3 moves from (6,9) to (9,8). Therefore the
corresponding records in the storage grid for these
objects are shown in Figure 3.
Figure 3: Storage grid stores records for each
moving object.
If M3 is being queried about its location, the
coordinates will be retrieved depending on the
nature of the query. If it is a past query, then the
query result is (6,9). If it is a present query, then the
query result is (9,8). If the query asks about the
future location of M3, then the future location will
be estimated by a motion function. The motion
function is a function of time which is used to
estimate the future location of a moving object by
considering its current and/or past locations,
direction, and velocity. The concept of motion
function is introduced by (Sistla et. al., 1997) and
there is no known alternate method so far for
modelling moving objects
(Chon et. al., 2001).
Each moving object has different patterns, so they
each will have a motion function. Suppose the
motion function for moving object M3 predicts that
it follows an almost straight route, then the cell (8,3)
will be returned as the query result. Retrieving the
moving object location directly from the appropriate
cell is apparently faster than from a tree structure,
since in a tree structure the path to the proper
location has to be traversed. Also, updating the
moving object location in a grid structure is faster
than in a tree structure. Suppose M3 suddenly
changes direction (the dotted arrow in Figure 4a).
Whenever the predicted location from the motion
function is different from the actual location, the
motion function will initiate a location update. In
the case of M3, the updated location is (7,5) and the
motion function will provide a different predicted
location. So whenever an update is necessary, it
does only involve updating the required record in a
cell. Therefore there is no need for traversing,
inserting or deleting of the cells. This certainly will
shorten the time required for the update operation.
The number of cells in a grid structure and the
structure itself remain the same at all times. So even
after numerous updates, there is no time penalty
imposed when retrieving a query result from a cell in
a grid structure. Also the query performance stays
the same after frequent updates because there is no
need for rebuilding the structure. Figure 4b shows
ID, location, time
e.g. M1,4,0,1:00
M1
(
2,8
(
8,5
)
(
9,8
)
(
6,9
)
(
4,3
M3, 6,9, time0
M3, 9,8, time1
PREDICTIVE QUERYING IN SPATIO-TEMPORAL ENVIRONMENT
285

the past and current locations’ records for object M1,
while Figure 4a shows the result of motion function
which is used to predict the future location of
moving object from one location to the next.
Figure 4a
M1, 2,8, time0
M1, 3,7, time1
M1, 5,6, time2
M1, 7,5, time3
Figure 4b
7 CONCLUSIONS
The process of storing and processing queries on the
location of moving objects still remains a
challenging problem in spatio-temporal databases.
The majority of current researches on the subject
proposed indexing methods that were based mostly
on R-tree and its derivation. These indexing
structures require rebuilding periodically to ensure
optimal efficiencies especially because operations
such as insertion and deletion can degenerate the
index structure and degrade the query performance.
The continuous need for periodic rebuilding to
prevent degeneration and to maintain query
performance is an expensive process. This paper
proposed an alternative method that uses the grid
structure to query the positions of moving objects.
In contrast to indexing methods, grid structures do
not require periodic rebuilding because the number
of levels of a grid structure remains unchanged
during the updates and retrievals, therefore query
performance can be maintained at no extra cost.
REFERENCES
Chon H. D., Agrawal D., Abbadi A. E., 2001. Using
Space-Time Grid for Efficient Management of
Moving Objects. In Proceedings of the 2nd ACM
International Workshop on Data engineering for
Wireless and Mobile Access, 59-65.
Guttman A., 1984. R-trees: A Dynamic Index Structure
for Spatial Searching. In Proceedings of the 1984
ACM SIGMOD International Conference on
Management of Data, 47-57.
Kalashnikov D. V., Prabhakar S., Aref W. G., Hambrusch
S., 2002. Efficient Evaluation of Continuous Range
Queries on Moving Objects. In Proceedings of the
13th International Conference on Database and
Expert Systems Applications, DEXA.
Meng X., Ding Z., DSTTMOD, 2003. A Future Trajectory
Based Moving Objects Database. DEXA, 444-453.
Mokbel M. F., Ghanem T. M., Aref W. G., 2003. Spatio-
temporal Access Methods. In IEEE Data Engineering
Bulletin, 26(2), 40-49.
Nievergelt J., Hinterberger H., Sevcik K. C., 1984. The
Grid File: An Adaptable, Symmetric Multikey File
Structure. ACM Transactions on Database Systems,
9(1), 38-71.
Porkarw K., Lazaridis I., Mehrotra S., 2001. Querying
Mobile Objects in Spatio-Temporal Databases.http://
infolab.usc.edu/csci599/Fall2001/paper/porkaew.pdf
Prabhakar S., Xia Y., Kalashnikov D., Aref W. G.,
Hambrusch S., 2002. Query Indexing and Velocity
Constrained Indexing: Scalable Techniques for
Continuous Queries on Moving Objects. IEEE
Transactions on Computers, Volume 51, Issue 10,
1124-1140.
Sistla A. P., Wolfson O., Chamberlain S., Dao S., 1997.
Modeling and Querying Moving Objects. In
Proceedings of IEEE Data Engineering, 422-432.
Theodoridis Y., Sellis T., Papadopoulos A. N.,
Manolopoulos Y., July 1998. Specifications for
Efficient Indexing in Spatiotemporal Databases. In
Proceedings of SSDBM'98, Capri, Italy.
Wolfson O., Location Management and Moving Objects
Databases. http://www.cs.uic.edu/~wolfson/presentat
ion/Presentation.ppt.
Kollios, G., 2003. Spatial-temporal Databases: Time
Parameterized Queries. Lecture: CS 562: Advanced
Database Applications.http://www.cs.bu.edu/faculty/
gkollios/ada03/LectNotes/tpqueries.ppt.
(
2,8
(
8,3
)
(
5,6
)
(
3,7
)
(
4,3
(7,5)
ICETE 2004 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
286
