
DETOUR PATH RESOURCE MANAGEMENT METHODS FOR IP
SERVICE OPERATION
Yu Miyoshi, Tatsuyuki Kimura
NTT Corporation, NTT Network Service Systems Laboratories
9-11, Midori-Cho 3-Chome Musashino-Shi, Tokyo 180-8585 Japan
Keywords:
Detour path, resource management, SP calculation, QoS-guaranteed video streaming service.
Abstract:
In the conventional IP network, equipment has been managed by periodical SNMP polling and periodical
ping by a network management system (NMS), and traps have been used when abnormalities occur. But it
is difficult to operate a service related to network state changes by such a management method because IP
network services are best-effort services, so they may be affected by other multiplexed traffic. In order to
solve such problems, we propose a detour path resource management method for IP networks. We discuss
its advantages and how to overcome problems and verify that IP network resource management that includes
detour path management is sufficient for practical use.
1 INTRODUCTION
To offer QoS-guaranteed video streaming services in
an IP network, it is effective to use a Bandwidth Bro-
ker (Masuda et al., 2002) that controls a user’s ac-
cess according to the network resource situation. The
Bandwidth Broker specifies the network topology and
service paths by using a network Resource Manage-
ment Server (RMS) that can comprehend the band-
width of the network. But, this is not sufficient. A
service cannot be called a QoS-guaranteed service un-
less the service traffic paths that bypass the failure
point are immediately specified after abnormalities.
The RMS needs to specify detour paths at the time
of failure and inform the Bandwidth Broker which re-
sources need to be managed.
In an IP network, there are various real-time path
management approaches based on a server such as an
RMS. However, there are discrepancies between the
service path information stored by the server and the
real network situation, whichever method is used, be-
cause of the processing delay of the RMS required for
refreshing path information and re-calculating short-
est paths (SPs).
On the other hand, an RMS can specify service
paths using weight (cost) information of OSPF (Moy,
1998) or IS-IS (Callon, 1990). And the Bandwidth
Broker can store detour path resource information that
the RMS specified. In this method, the Bandwidth
Broker can reallocate management resources to de-
tour paths at the moment of failure detection. How-
ever, it is not realistic to store all (detour and shortest)
path information in a database, because obtaining all
detour paths makes the number of assumed fault pat-
terns huge depending on the network scale. So, we
propose a “Look-ahead type” detour path specifica-
tion method.
We succeeded in reducing the number of calcula-
tions required for detour paths by using an RMS that
implements the “Look-ahead type” detour path speci-
fication method. First, this paper describes the Band-
width Broker type QoS-guaranteed service which is
the target. Next, we describe related work, espe-
cially topology management approaches that have
been proposed. Then, we explain our “Look-ahead
type” detour path specification method. In section V,
we evaluate the usefulness and implementability of
our method by testing an RMS that implemented our
method. Conclusions are drawn in section VI.
2 QOS-GUARANTEED SERVICE
In this section, we describe Bandwidth Broker type
QoS-guaranteed services using an RMS. One of the
biggest causes of poor video streaming quality is con-
gestion caused by multiplexing. If packet loss occurs
because of the congestion, the time sequence of the
287
Miyoshi Y. and Kimura T. (2004).
DETOUR PATH RESOURCE MANAGEMENT METHODS FOR IP SERVICE OPERATION.
In Proceedings of the First International Conference on E-Business and Telecommunication Networks, pages 287-292
DOI: 10.5220/0001390102870292
Copyright
c
SciTePress
video information will be spoiled and the pictures will
deteriorate. In video streaming, the user is looking at
the screen for a long time. That is, video streaming is
a service in which quality deteriorates in a conspicu-
ous manner. Moreover, the system must react to the
user’s demand in real time. So we have been investi-
gating how to achieve QoS-guaranteed video stream-
ing services using the Bandwidth Broker model (Ma-
suda et al., 2002) (Zhang et al., 2000).
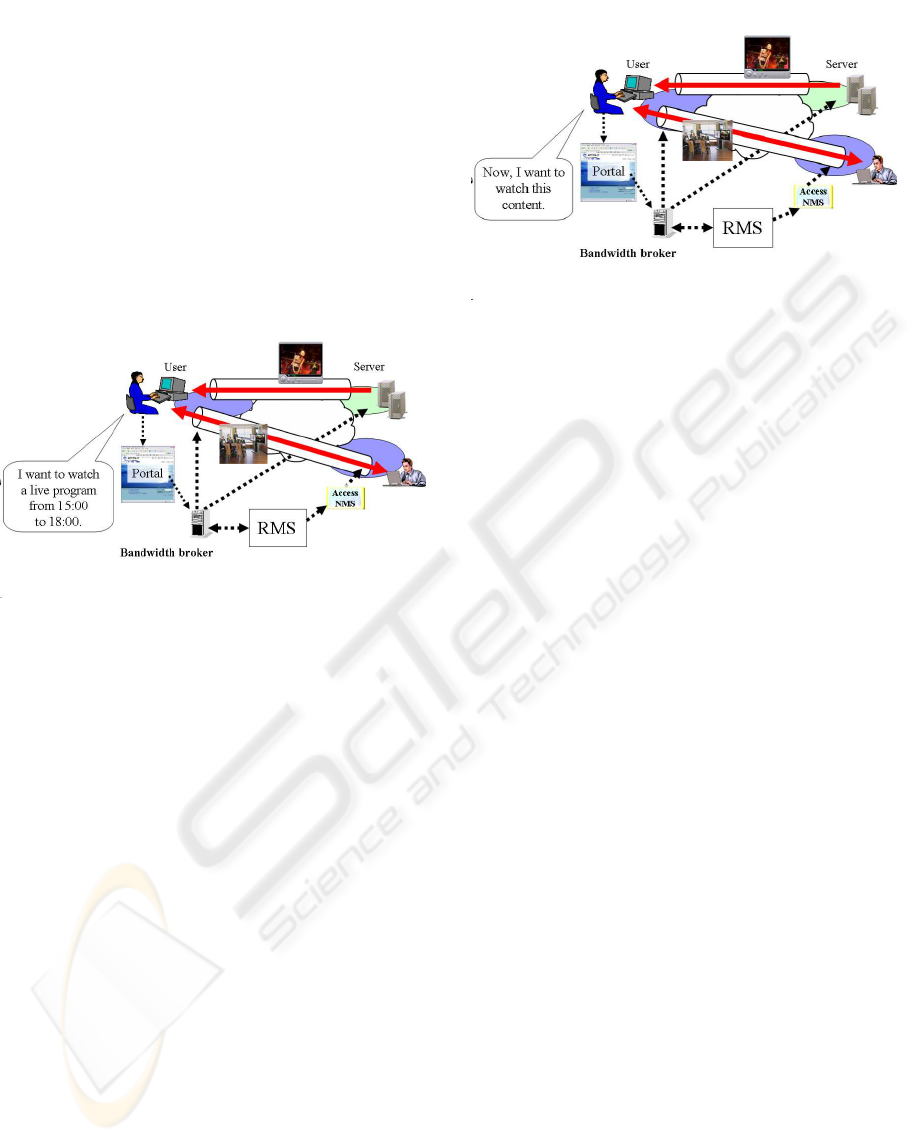
For example, we have proposed a service whose
quality is guaranteed for live distribution and video
meetings where the time of use is fixed beforehand
(Figure 1).
Figure 1: Quality reservation service.
First, the user tells the RMS when the service is re-
quired. The system checks free resources of the short-
est path at that time, and reserves quality. As a result,
the service can guarantee the quality of a target time
slot by performing priority control at the appropriate
time. Since the service can acquire time information
from the user beforehand, a Bandwidth Broker can
judge in advance in which time slot the service opera-
tor should guarantee the quality of which service. For
a user, if reservation is approved, a guarantee of qual-
ity can be received certainly, and if it is not given, it
may be possible to re-schedule in advance.
In contrast, if a distribution demand comes imme-
diately from a user like a video on demand (VoD) ser-
vice, the type of reservation described above is not
applicable (Figure 2).
For such a service, it is effective to provide a guar-
antee of quality based on an understanding of the con-
sumption of each resource in real time and access con-
trol judgment according to the network resource situ-
ation.
In these services, a RMS needs to process a user’s
access in real time. Therefore, the burden on a sys-
tem is large and resource calculation cannot be done
before the deadline in a large-scale network. For load
balance, it will be necessary for the RMS which pre-
pares path and resource information to be separated
Figure 2: Real-time access control service.
from a Bandwidth Broker which receives a user’s ac-
cess. Even in a conventional IP network, a Bandwidth
Broker can provide video contents to a user with qual-
ity ensured by comprehending the resource situation
and controlling access to content.
Next, we describe the network resource informa-
tion of the RMS required for access control by a
Bandwidth Broker. What network resources should
be managed in order to ensure such service quality?
On an IP network, the typical resources that a service
consumes are related to the switching performance of
a node (a router or switch) and the bandwidth (inter-
face speed) of a network link. If a network is designed
in advance by operator as its switching performance
is greater than bandwidth, then our RMS should pro-
vide bandwidth capacities as the network resources
with service path information to a Bandwidth Bro-
ker. However, what is necessary is not just to treat
wire speed (the IF speed that enables MIB-II to ac-
quire data by SNMP) as a resource in that the service
quality is managed. It is necessary to take into con-
sideration the quantity of control protocol traffic and
the burstiness of service traffic.
Next, we describe methods for selecting service
paths. To manage bandwidth capacities of service
paths, the RMS has to specify each link from edge
routers that connect to the server to the edge routers
that connect to user nodes. If the service is an inter-
active one such as a videophone, then the RMS has
to specify the path from an edge router connected to
a caller to an edge router connected to the destination
user. For this reason, an RMS specifies the paths be-
tween any two points. In particular, it gets the weight
(cost information used by OSPF or IS-IS) and IP ad-
dresses by SNMP. Next, the RMS determines the re-
lationships between NEs using IP addresses and sub-
net masks. As a result, the network topology can be
discovered. After the network topology has been dis-
covered, the RMS specifies all service paths between
ICETE 2004 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
288

any two points. The paths have minimum weights of
OSPF between each pair of points (shortest paths).
In addition, a Dijkstra algorithm (Dijkstra, 1959) is
used as the shortest path selection algorithm as well
as OSPF.
3 RELATED WORK
Various methods have been proposed to discover the
topology and specify service paths in order to manage
network resources.
(Siamwalla et al., 1998) proposed a network topol-
ogy discovery method that does not use SNMP but
uses traceroute and ping. However, this method did
not describe shortest path specification methods used
by OSPF.
((Shaikh et al., 2002) and (Shaikh and Greenberg,
2004)) proposed a method that uses an OSPF message
such as LSA. If an RMS uses this method, a Band-
width Broker can specify every shortest path of OSPF
in real time. However, in this method, we need special
servers that implement an LSA speaker method and a
robust security framework. And this method needs
to connect with each OSPF area. For our Bandwidth
Broker type QoS-guaranteed service, these costs are
large. Furthermore, in their method, a discrepancy
between the service path of a real network and the re-
sources stored by a Bandwidth Broker occurs in the
calculation time. Rapid convergence technology pro-
vided by router vendors has advanced greatly (Cis-
coSystems, 2003). After a failure occurs, network
topology convergence may be possible within in one
second. If an RMS starts calculating after failure de-
tection, it cannot eliminate the discrepancies in the
process.
On the other hand, if an RMS collects the weights
of OSPF or IS-IS, it can specify shortest paths before-
hand. In addition, an RMS assumes that each node
or link has failed, and calculates shortest paths in the
topology without assumed failure points. Therefore
it can also store detour paths beforehand. An RMS
can switch managed resources to detour paths as soon
as failure has been detected and discrepancies can
also be minimized. However, the number of assumed
failure patterns to calculate all detour paths becomes
huge depending on the network scale. So, it is not re-
alistic to store all path data in the database of an RMS
or Bandwidth Broker. Furthermore, the calculation
of detour paths is especially heavy. In the worst case,
the calculation could take several days. Therefore, the
service cannot be started quickly.
So, we devised a new detour path calculation
method called the “Look-ahead type” detour path
specification. If failures occur, we can satisfy both the
need to reduce the number of necessary calculations
for detour paths and high-speed switching of managed
resources in a Bandwidth Broker type service.
4 “LOOK-AHEAD TYPE”
DETOUR PATHS
SPECIFICATION
In this method, an RMS calculates only shortest paths
and “primary” detour paths before service starts. It
does not calculate all detour paths. The detour path
calculation procedure is shown below. An RMS ex-
tracts shortest paths between every pair of nodes, and
saves them all in the database. At this time, the in-
formation about nodes and links between the starting
point S and the destination point D is held as attribute
information of the shortest path. We assume that one
of these links or nodes breaks down. The shortest path
between S-D in the network topology avoiding the as-
sumed failure is recalculated (Figure 3).
Figure 3: Detour path specification.
This is repeated for all nodes or links. Next, the
DETOUR PATH RESOURCE MANAGEMENT METHODS FOR IP SERVICE OPERATION
289

RMS calculates the detour paths in the case of multi-
ple link or node failures. Furthermore, this procedure
is repeated for all shortest paths. If a selected path
produces the same results, the path is not stored. The
specified paths when the shortest paths break down
are defined as primary (1st) detour paths.
In the stage in which the primary detour path cal-
culations ended, an RMS provides Bandwidth Broker
with path information and service starts. Paths that
bypass the primary detour path are defined as sec-
ondary detour paths. Theoretically an RMS could cal-
culate the secondary detour paths when assuming that
the primary detour paths are broken. Likewise, the
more-than-third detour paths can be extracted. But
in our method, these detour paths are not calculated
before service starts (only shortest paths and primary
detour paths are calculated), because the detour paths
more than secondary are not used at the service start
time. Another reason for not calculating detour paths
more than secondary is because the load becomes sev-
eral times larger than for a primary path since the
number of failure patterns increases. By not calculat-
ing the detour paths more than secondary, we sharply
reduce the amount of calculation before service starts.
However, we think the RMS cannot provide QoS-
guaranteed services using only primary detour paths
in the long-term service employment, because the
possibility of serious failure occurring increases and
more-than-secondary detour paths are needed for ser-
vices in long-term service operation. In this case, an
RMS may not obtain necessary detour paths with-
out calculating more-than-secondary detour paths.
But our “Look-ahead type” detour path specification
method definitely provides detour path information
about one step ahead using network monitoring. Af-
ter providing shortest paths and primary detour paths,
an RMS continuously monitors the network by ping
and trap. If a network failure is detected, the RMS
reports the failure point to a Bandwidth Broker. The
Bandwidth Broker immediately switches managed re-
sources to detour paths. At this time, the Bandwidth
Broker does not interrupt its service because it has
already stored necessary paths among the primary de-
tour paths. After informing the Bandwidth Broker,
the RMS starts calculating new primary detour paths
based on the present network topology existing after
the failure. The new primary detour paths are actu-
ally included among secondary detour paths at ser-
vice start. The amount of calculation for new primary
detour paths is less than that for all secondary detour
paths before the service starts because necessary de-
tour paths are limited by failure. These calculations
are performed as background processes by an RMS.
Therefore, the current service by a Bandwidth Broker
is not interrupted.
In this method, the RMS can achieve a result equiv-
alent to calculating the third and higher detour paths
by calculating primary detour paths after a failure.
When there is two or more failure, a network topol-
ogy pattern is changed in accordance with the order of
recovery. Therefore, the RMS has to calculate the re-
covery path with primary detour paths, and the paths
are reported to a Bandwidth Broker. The calculation
flow of our method for detour paths is shown in Fig-
ure 4.
Figure 4: State changes of “Look-ahead type” detour path
calculation.
5 EVALUATION
In this section, we evaluate the “Look-ahead type” de-
tour path specification method. The model network of
OSPF topology is shown in Figure 5.
Figure 5: Network model (OSPF topology).
ICETE 2004 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
290

In this network, OSPF areas are directly connected
to area 0. We assume the basic topology in each area
is a tree type. However, some paths are duplex, and
detour paths exist for service redundancy. We verified
our method for 100 to 2000 edge routers.
The dependence of the number of links and paths
or the number of nodes for the above-mentioned con-
ditions is shown in Figure 6.
Figure 6: Dependence of the number of links and paths on
the number of nodes.
In this simulation, the number of links was almost
linearly proportional to the number of nodes, and the
number of paths was proportional to the 2nd power of
the number of links.
First, the number of paths is shown in Table 1.
Table 1: Number of paths.
ERs Shortest path 1st 2nd 3rd
100 9,900 31,460 55,730 356,390
1000 999,900 3,909,560 6,848,930 20,431,590
2000 3,998,000 15,818,520 27,696,860 82,859,380
The number of times of the Dijkstra calculation is
considered to occupy a large proportion of the path
specification processing as shown in Table 2.
Table 2: Number of times of Dijkstra calculation.
ERs Shortest path 1st 2nd 3rd
100 2,956 11,824 47,296 281,411
1000 35,240 140,960 563,840 3,354,848
2000 79,622 318,488 1,273,952 7,580,014
The detour path specification by assumption of fail-
ure patterns is not very efficient because of reachabil-
ity loss and re-extraction of the same paths. However,
the number of calculations is less than the number
of paths because the RMS specifies paths inside the
OSPF area first. Next, it connects each path between
areas. Finally, it determines an end-end path.
The simulation showed that when calculations were
performed using a general-purpose PC (CPU: Pen-
tium 4 2.5GHz), the calculation time for deriving
about 4 million SPs in a 2000-node network was
about 60 seconds. These results show that the Dijk-
stra algorithm is fast enough for service. And it took
11 minutes to calculate the 15 million primary detour
paths. They show that there is no serious influence on
the start of service.
However, it will probably be difficult to prepare
detour paths beforehand if the “Look-ahead type”
method is not used because the calculation time was
more than 3 days until the third detour path was
completely extracted. Specifying beyond third de-
tour paths takes even more time. When the “Look-
ahead type” is used, service can start after 11 minutes.
Primary detour paths for the present topology are
consistently prepared after service has started. The
worst case that we consider is that the discrepancy
for re-calculating the shortest paths occurs for about
1 minute in our “Look-ahead type” detour path spec-
ification. This is because the discrepancy only occurs
in the case where many nodes break down simultane-
ously and the detour paths more than primary detour
paths used by the service are suddenly required. In
these cases, you should consider the case where a se-
rious failure, like loss of network connection, occurs.
6 CONCLUSION
We proposed a resource management method for IP
networks, called “Look-ahead type” detour path spec-
ification. We discussed the advantages and problems
of detour path management methods and verified that
IP network resource management that includes detour
path management is sufficient for practical use.
In addition, each function of a RMS has been devel-
oped as a software module that operates on a service
management platform called a service resource agent
(SRA) (Miyoshi and Kimura, 2002) (Miyoshi et al.,
2002) (Figure 7).
A SRA has a general-purpose interface to connect
network management systems and network elements.
A SRA can collect data to perform service manage-
ment by SNMP or telnet using this interface. More-
over, the table of a database is designed so that one
service path can be managed as one object. We could
use these functions without changing a SRA platform
and implement a RMS on a SRA as only one func-
tion module which calculates shortest paths and de-
tour paths.
DETOUR PATH RESOURCE MANAGEMENT METHODS FOR IP SERVICE OPERATION
291
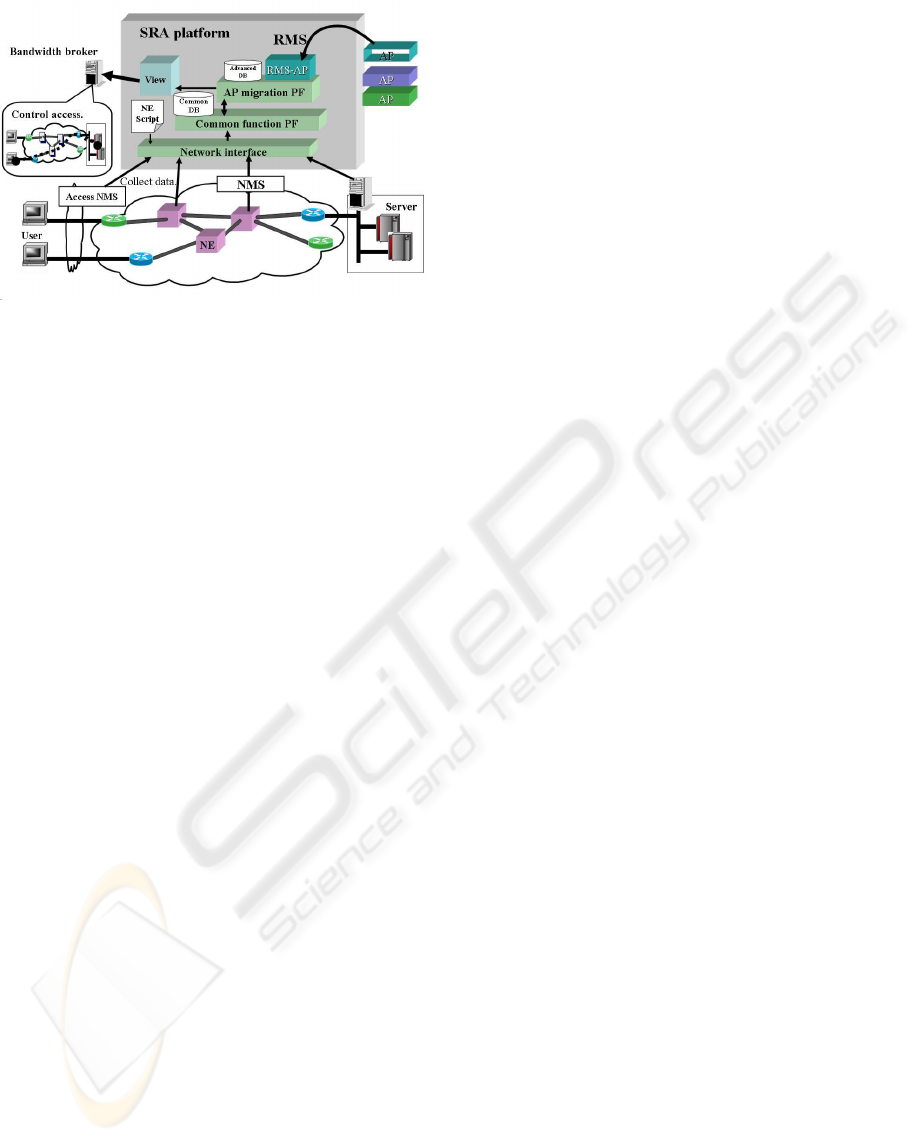
Figure 7: Service management platform.
Even for IP network services, which are best-effort
services, the topology and paths can be specified by
the method presented in this paper and functions that
achieve QoS-guaranteed service can be provided. Our
detour path specification method is applicable to var-
ious other services, so we want to use it to contribute
to the creation of new services.
REFERENCES
Callon, R. (1990). RFC1195 : Use of OSI IS-IS for Routing
in TCP/IP and Dual Environments.
CiscoSystems (2003). Cisco NSF and Timer Manipulation
for Fast Convergence. Cisco Systems White Paper.
Dijkstra, E. W. (1959). A note on two problems in conexion
with graphs. 1:269–271.
Masuda, A., Hironaka, T., Yaguchi, M., Shima, M., and
Kuronaka, A. (2002). Prototype implementation of
a bandwidth agent for content delivery service. In
Proceedings of World Telecommunications Congress
(WTC-ISS) 2002, Paris, France.
Miyoshi, Y. and Kimura, T. (2002). Service resource man-
agement architecture. NTT REVIEW, 14(3):28–34.
Miyoshi, Y., Kimura, T., Otsuka, Y., Fujita, Y., Majima,
S., and Suda, K. (2002). An implementation of ser-
vice resource management architecture. In Proceed-
ings of World Telecommunications Congress (WTC-
ISS), Paris, France.
Moy, J. (1998). RFC2328 : OSPF Version2.
Shaikh, A., Goyal, M., Greenberg, A., Rajan, R., and Ra-
makrishnan, K. K. (2002). An ospf topology server:
Design and evaluation. IEEE Journal on selected ar-
eas in communications, 20(4):746–755.
Shaikh, A. and Greenberg, A. (2004). Ospf monitoring:
Architecture, design and deployment experience. In
USENIX Symposium on Networked System Design
and Implementation (NSDI).
Siamwalla, R., Sharma, R., and Keshav, S. (1998). Dis-
covering internet topology. In [online], Available:
http://www.cs.cornell.edu/skeshav/papers/discovery.pdf.
Zhang, Z.-L., Duan, Z., Gao, L., and Hou, Y. T. (2000).
Decoupling qos control from core routers: a novel
bandwidth broker architecture for scalable support of
guaranteed services. In Proceedings of ACM Special
Interest Group on Data Communication (ACM SIG-
COMM’00), New York, NY, USA.
ICETE 2004 - SECURITY AND RELIABILITY IN INFORMATION SYSTEMS AND NETWORKS
292
